
Cluster Analysis of Seismicity in the Eastern Gulf of Corinth Based on a Waveform Template Matching Catalog

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- The possibility to examine potential temporal changes in the b-value of the Gutenberg–Richter scaling relation related to changes in the level of stress;
- The possibility to examine clustering effects of statistical properties of different multiplet families;
- The possibility to reveal changes in the seismicity rate unrelated to the occurrence of major events, hinting at possible triggering by external forcing (i.e., pressurized fluids or aseismic slip);
- The possibility to gain a more comprehensive view of the evolution of the swarm, e.g., by revealing earlier activation of certain areas or persistence of seismicity for longer than was previously known from routine analysis of data.
2. Materials and Methods
2.1. Template Matching Catalogs
- (1)
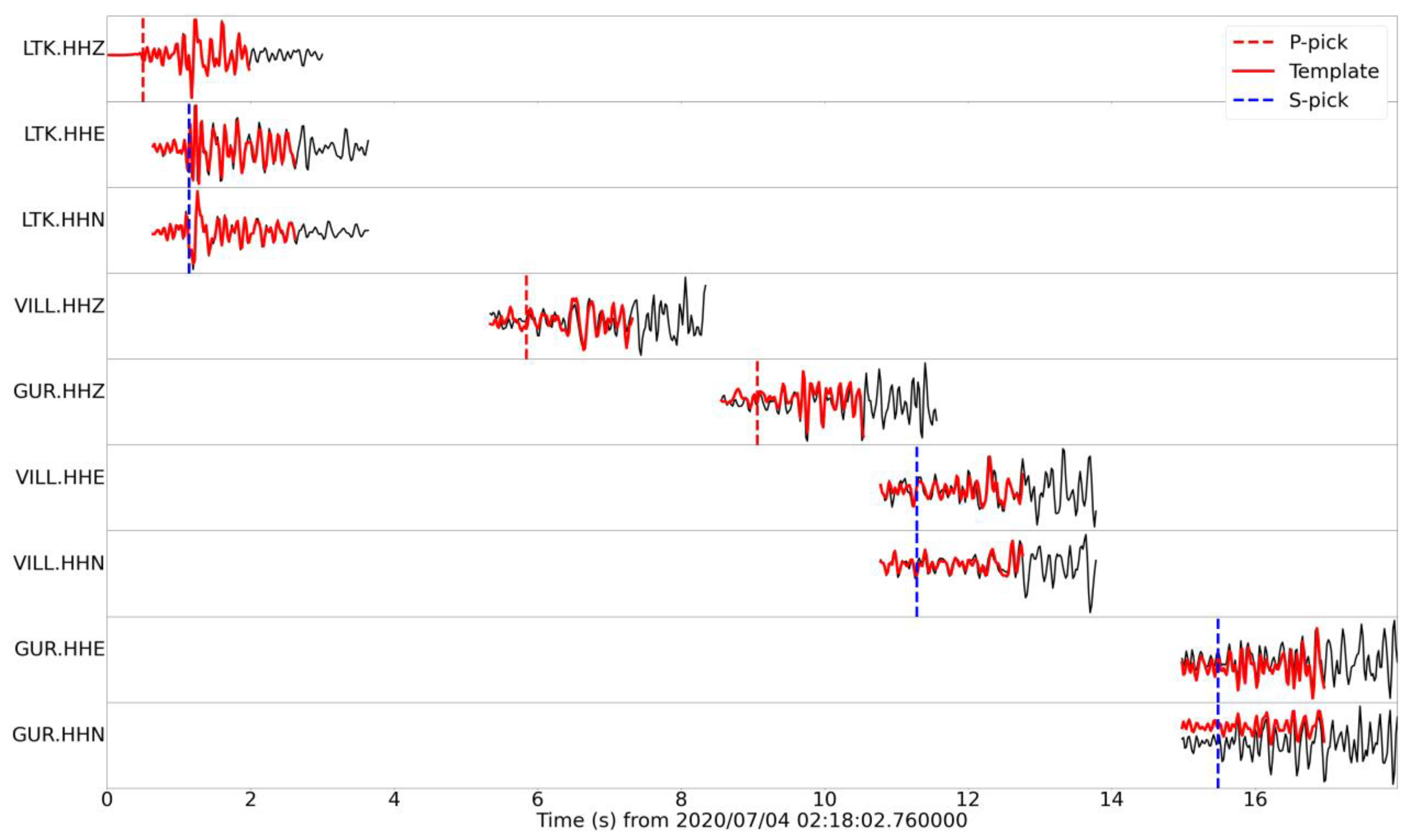
- Preparation of the templates dataset (tribe): waveform processing (down-sampling, filtering, P- and S-wave cropping at all available channels), parametric information sourcing (hypocenter, origin time, P- and S-wave travel times, magnitude) from the manual catalog;
- (2)
- Construction of a database of continuous recordings to be scanned for detections;
- (3)
- Application of the matched filter to make detections based on the template waveforms (families), performed on a day-by-day basis;
- (4)
- Merging of families constructed with the same template on different days into a single “party” (set of families);
- (5)
- Declustering of the party, removing duplicate detections by keeping those with the highest correlation coefficient;
- (6)
- Determination of relative magnitude for detections with an adequate correlation coefficient and signal-to-noise ratio;
- (7)
- Finetuning of the time lag to provide detections with more accurate arrival times for the P- and S-waves (multi-channel matched filter only).
2.2. Clustering and Relocation
3. Results
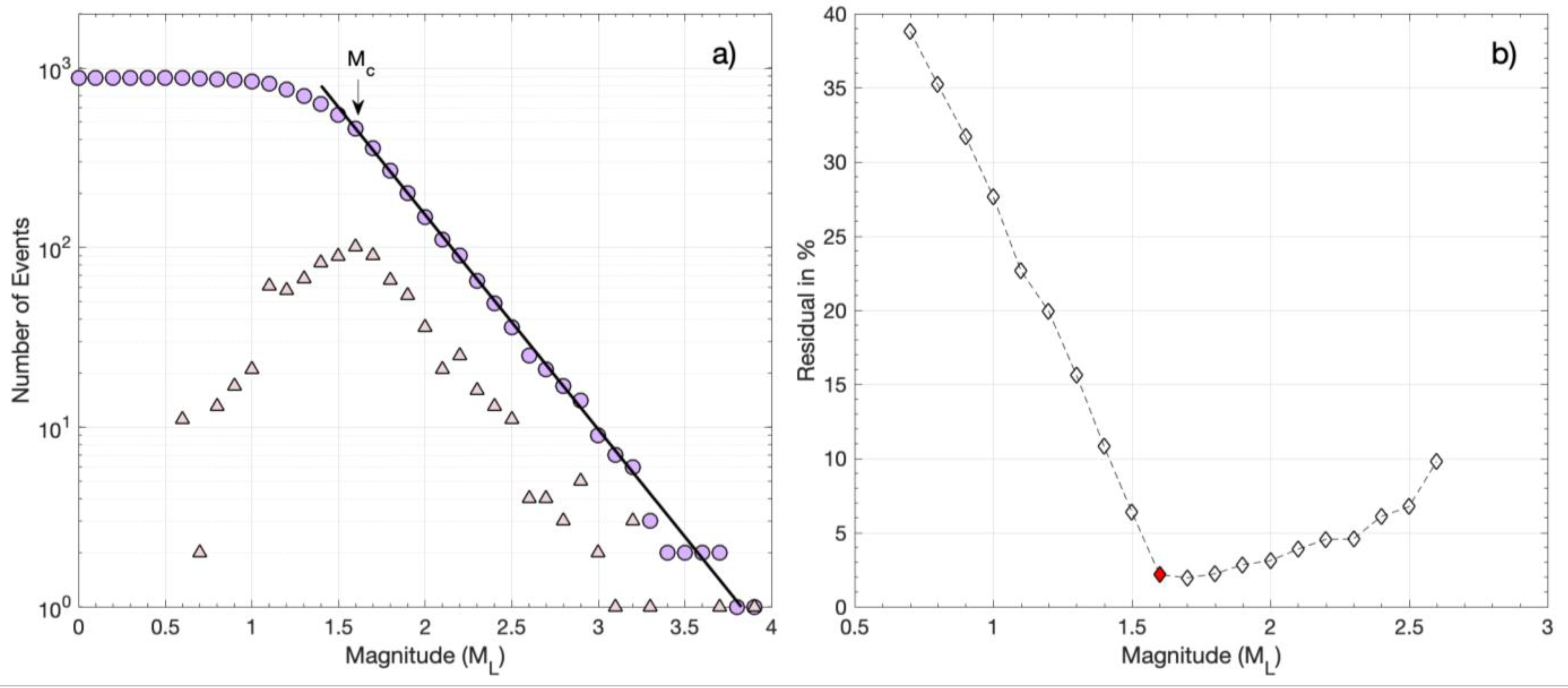
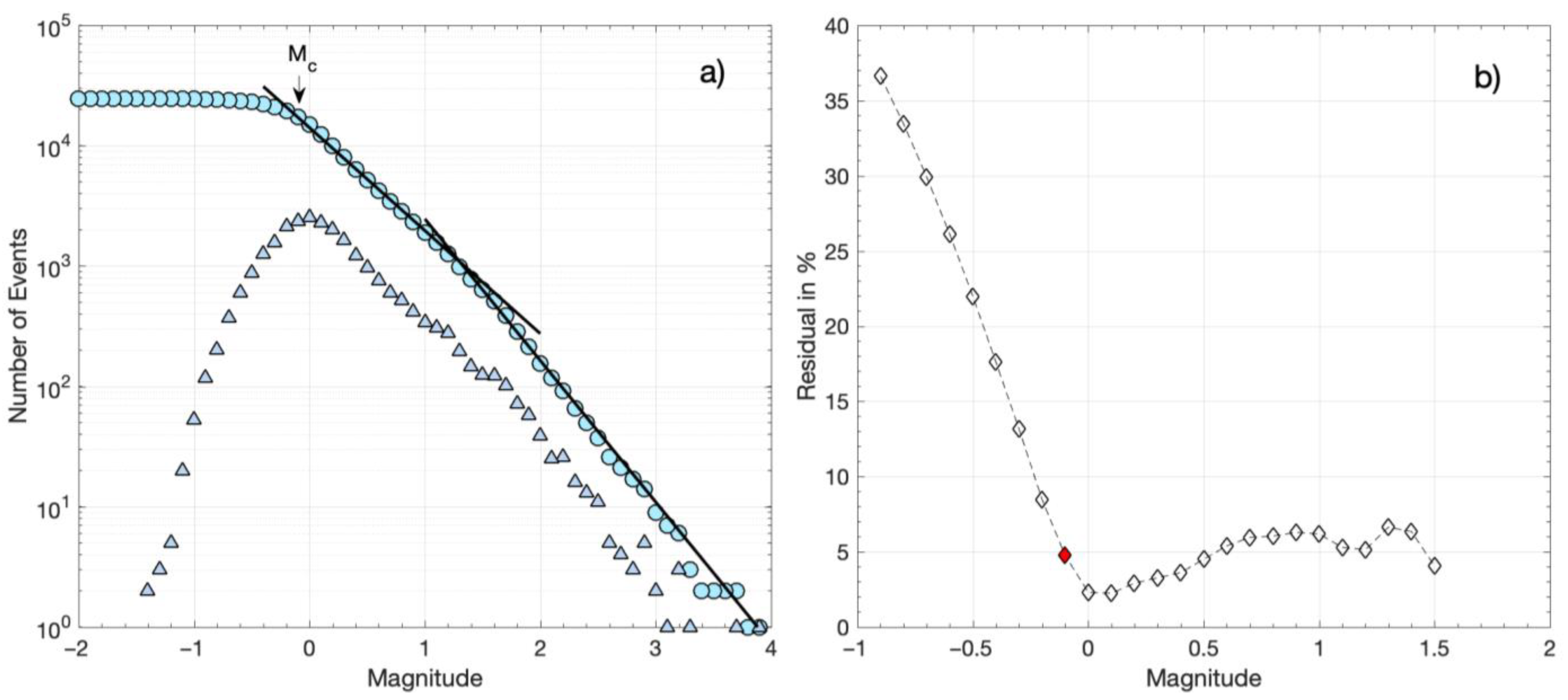
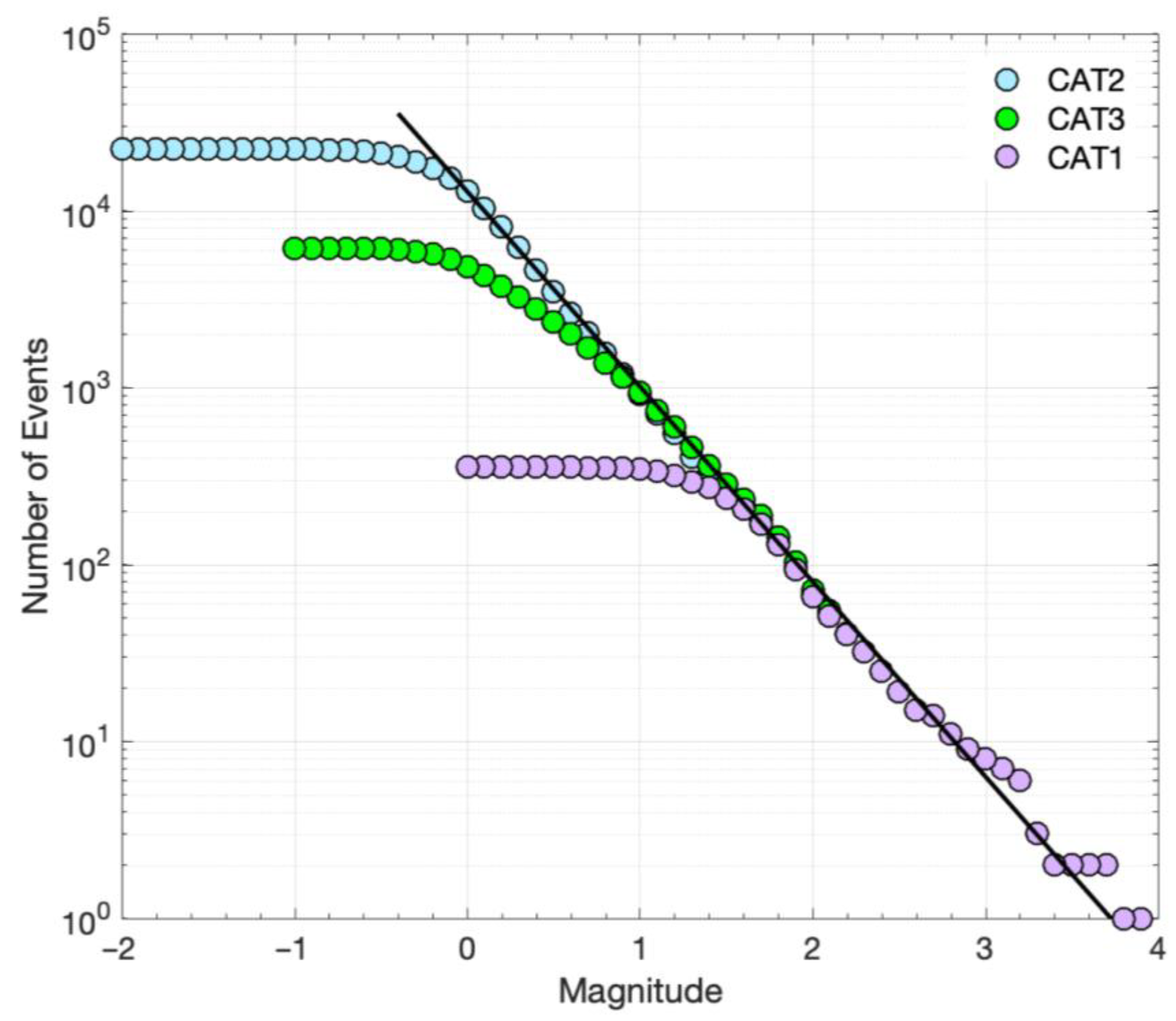
3.1. Frequency–Magnitude Distribution and Catalog Completeness
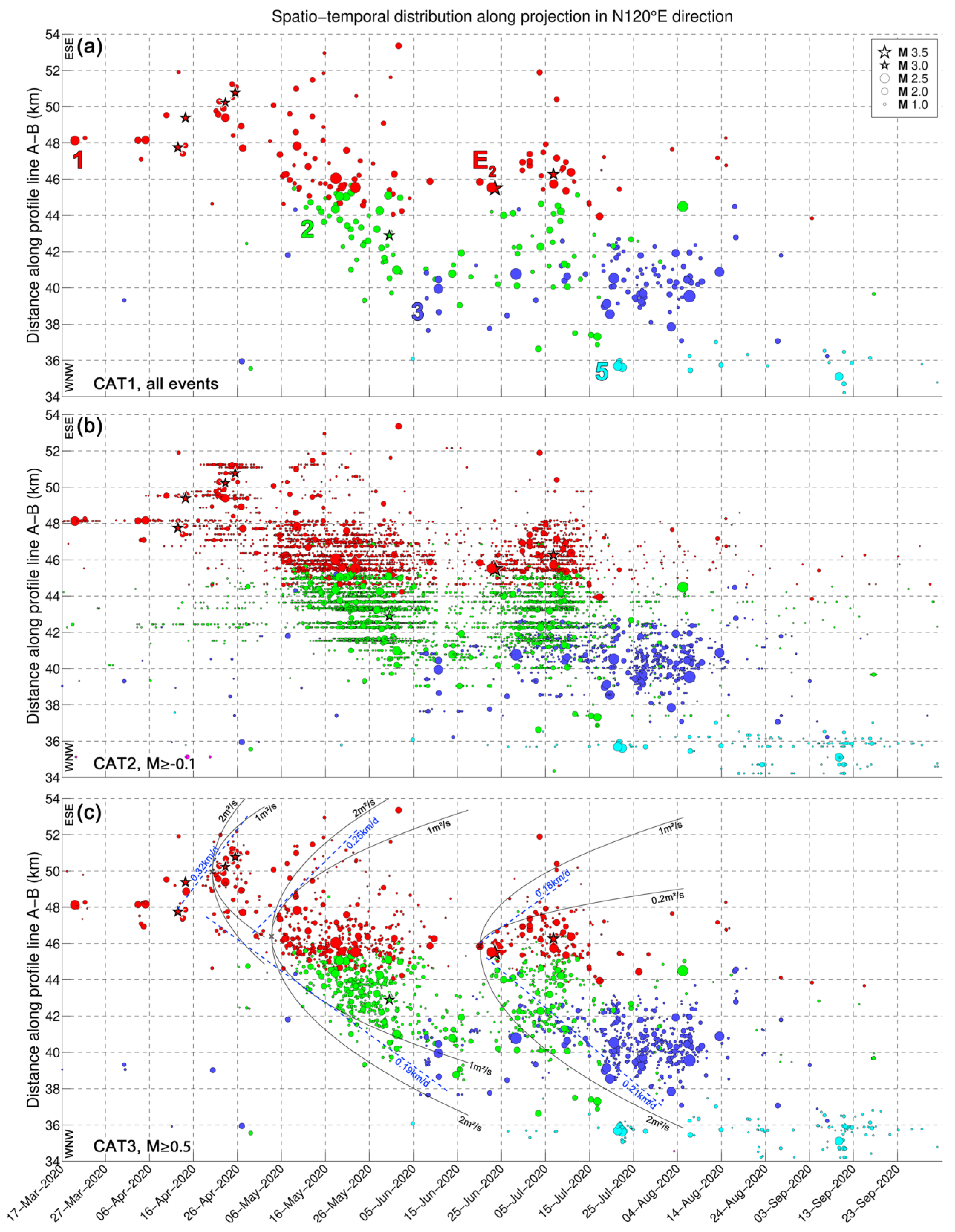
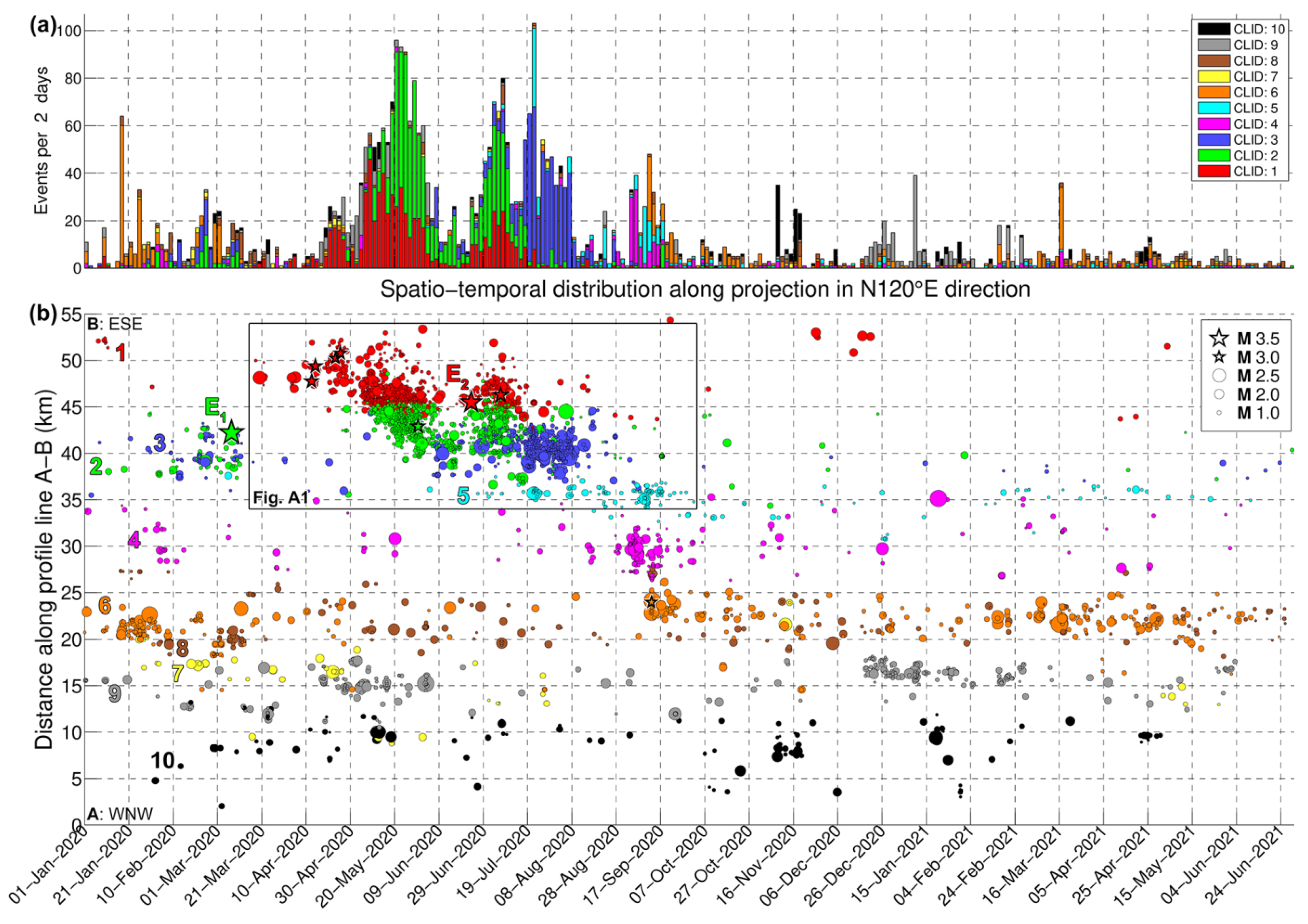
3.2. Spatiotemporal Distribution
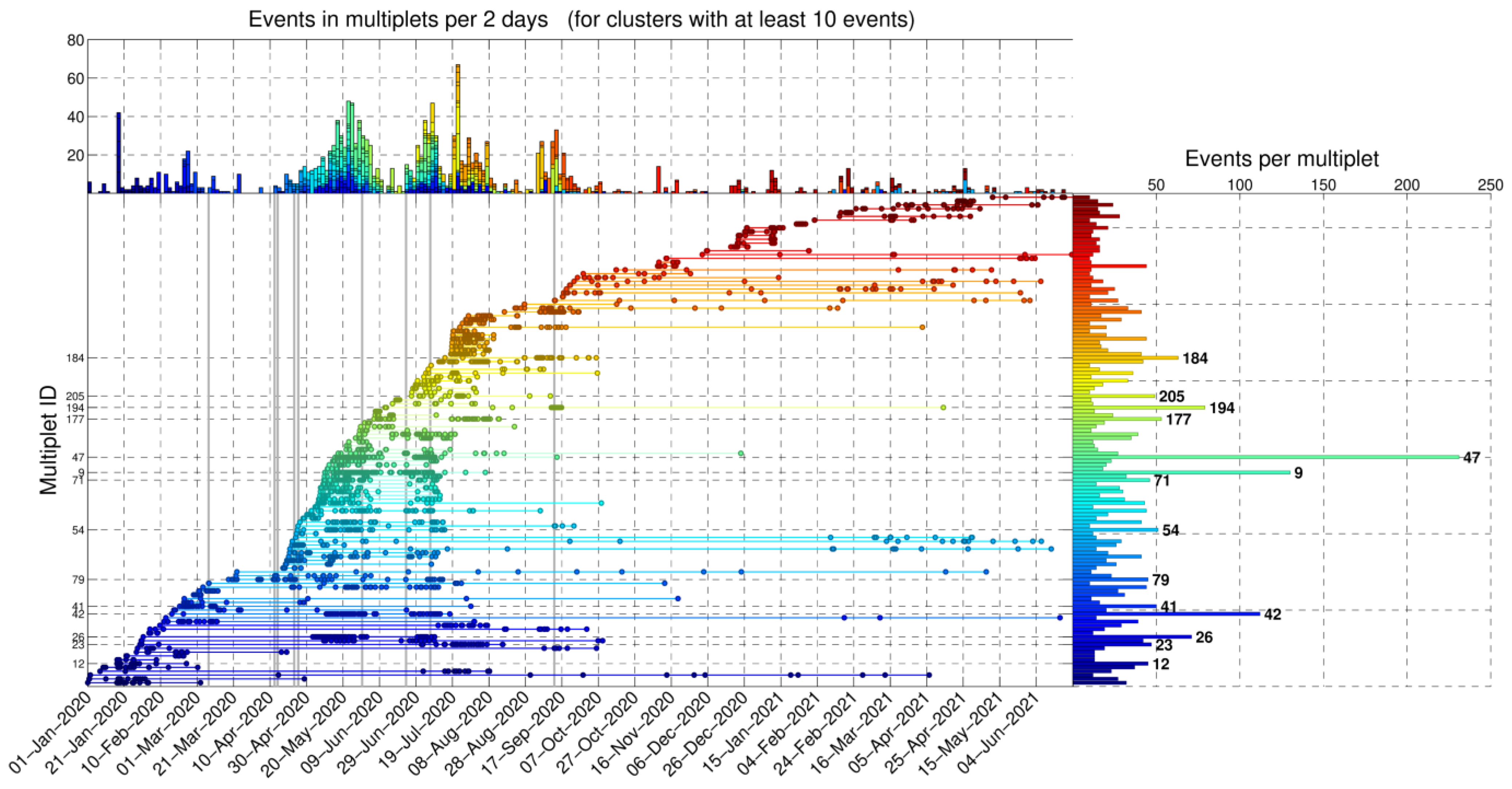
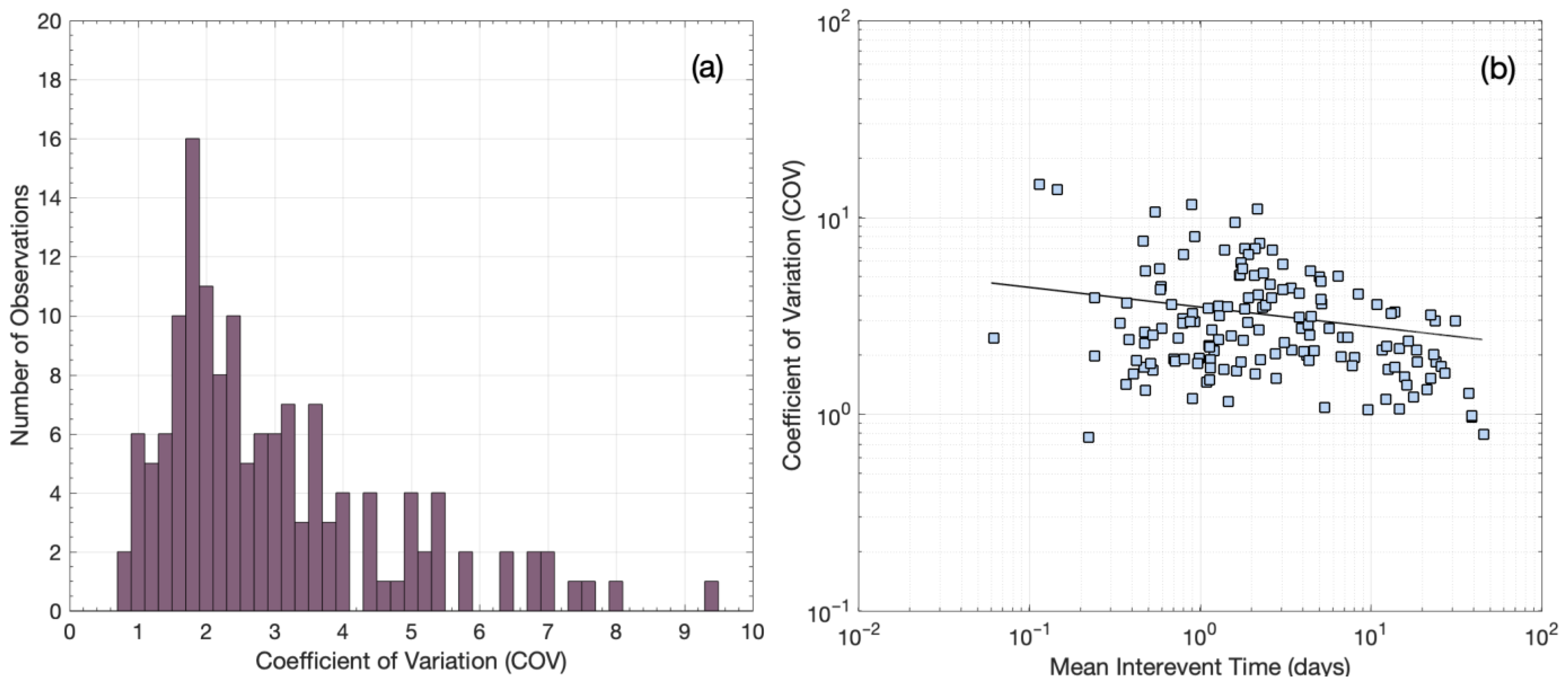
3.3. Temporal Properties of Multiplet Families
4. Discussion
4.1. General Catalog Properties
4.2. Benefits of the Enhanced Catalogs—Implications for Pore Pressure Diffusion and Stress Changes
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Additional Figures




References
- Kassaras, I.; Kapetanidis, V.; Ganas, A.; Karakonstantis, A.; Papadimitriou, P.; Kaviris, G.; Kouskouna, V.; Voulgaris, N. Seismotectonic Analysis of the 2021 Damasi-Tyrnavos (Thessaly, Central Greece) Earthquake Sequence and Implications on the Stress Field Rotations. J. Geodyn. 2022, 150, 101898. [Google Scholar] [CrossRef]
- Sokos, E.; Zahradník, J.; Kiratzi, A.; Janský, J.; Gallovič, F.; Novotny, O.; Kostelecký, J.; Serpetsidaki, A.; Tselentis, G.-A. The January 2010 Efpalio Earthquake Sequence in the Western Corinth Gulf (Greece). Tectonophysics 2012, 530–531, 299–309. [Google Scholar] [CrossRef]
- Karakostas, V.; Papadimitriou, E.; Mesimeri, M.; Gkarlaouni, C.; Paradisopoulou, P. The 2014 Kefalonia Doublet (Mw6.1 and Mw6.0), Central Ionian Islands, Greece: Seismotectonic Implications along the Kefalonia Transform Fault Zone. Acta Geophys. 2015, 63, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Vidale, J.E.; Shearer, P.M. A Survey of 71 Earthquake Bursts across Southern California: Exploring the Role of Pore Fluid Pressure Fluctuations and Aseismic Slip as Drivers. J. Geophys. Res. 2006, 111, B05312. [Google Scholar] [CrossRef]
- Mesimeri, M.; Karakostas, V.; Papadimitriou, E.; Tsaklidis, G. Characteristics of Earthquake Clusters: Application to Western Corinth Gulf (Greece). Tectonophysics 2019, 767, 228160. [Google Scholar] [CrossRef]
- Kaviris, G.; Kapetanidis, V.; Spingos, I.; Sakellariou, N.; Karakonstantis, A.; Kouskouna, V.; Elias, P.; Karavias, A.; Sakkas, V.; Gatsios, T.; et al. Investigation of the Thiva 2020–2021 Earthquake Sequence Using Seismological Data and Space Techniques. Appl. Sci. 2022, 12, 2630. [Google Scholar] [CrossRef]
- Kaviris, G.; Elias, P.; Kapetanidis, V.; Serpetsidaki, A.; Karakonstantis, A.; Plicka, V.; De Barros, L.; Sokos, E.; Kassaras, I.; Sakkas, V.; et al. The Western Gulf of Corinth (Greece) 2020–2021 Seismic Crisis and Cascading Events: First Results from the Corinth Rift Laboratory Network. Seism. Rec. 2021, 1, 85–95. [Google Scholar] [CrossRef]
- Poupinet, G.; Ellsworth, W.L.; Frechet, J. Monitoring Velocity Variations in the Crust Using Earthquake Doublets: An Application to the Calaveras Fault, California. J. Geophys. Res. 1984, 89, 5719–5731. [Google Scholar] [CrossRef] [Green Version]
- Hainzl, S.; Fischer, T.; Dahm, T. Seismicity-Based Estimation of the Driving Fluid Pressure in the Case of Swarm Activity in Western Bohemia: Seismicity-Based Fluid Pressure Estimation. Geophys. J. Int. 2012, 191, 271–281. [Google Scholar] [CrossRef] [Green Version]
- Shapiro, S.A.; Patzig, R.; Rothert, E.; Rindschwentner, J. Triggering of Seismicity by Pore-Pressure Perturbations: Permeability-Related Signatures of the Phenomenon. Pure Appl. Geophys. 2003, 160, 1051–1066. [Google Scholar] [CrossRef]
- Shapiro, S.A.; Huenges, E.; Borm, G. Estimating the Crust Permeability from Fluid-Injection-Induced Seismic Emission at the KTB Site. Geophys. J. Int. 1997, 131, F15–F18. [Google Scholar] [CrossRef]
- Hill, D.P. A Model for Earthquake Swarms. J. Geophys. Res. 1977, 82, 1347–1352. [Google Scholar] [CrossRef]
- Heinicke, J.; Fischer, T.; Gaupp, R.; Götze, J.; Koch, U.; Konietzky, H.; Stanek, K.-P. Hydrothermal Alteration as a Trigger Mechanism for Earthquake Swarms: The Vogtland/NW Bohemia Region as a Case Study. Geophys. J. Int. 2009, 178, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Michas, G.; Vallianatos, F. Scaling Properties and Anomalous Diffusion of the Florina Micro-Seismic Activity: Fluid Driven? Geomech. Energy Environ. 2020, 24, 100155. [Google Scholar] [CrossRef]
- Kassaras, I.; Kapetanidis, V.; Karakonstantis, A.; Kouskouna, V.; Ganas, A.; Chouliaras, G.; Drakatos, G.; Moshou, A.; Mitropoulou, V.; Argyrakis, P.; et al. Constraints on the Dynamics and Spatio-Temporal Evolution of the 2011 Oichalia Seismic Swarm (SW Peloponnesus, Greece). Tectonophysics 2014, 614, 100–127. [Google Scholar] [CrossRef]
- De Barros, L.; Cappa, F.; Deschamps, A.; Dublanchet, P. Imbricated Aseismic Slip and Fluid Diffusion Drive a Seismic Swarm in the Corinth Gulf, Greece. Geophys. Res. Lett. 2020, 47, e2020GL087142. [Google Scholar] [CrossRef]
- Vallianatos, F.; Karakonstantis, A.; Michas, G.; Pavlou, K.; Kouli, M.; Sakkas, V. On the Patterns and Scaling Properties of the 2021–2022 Arkalochori Earthquake Sequence (Central Crete, Greece) Based on Seismological, Geophysical and Satellite Observations. Appl. Sci. 2022, 12, 7716. [Google Scholar] [CrossRef]
- Vassilakis, E.; Kaviris, G.; Kapetanidis, V.; Papageorgiou, E.; Foumelis, M.; Konsolaki, A.; Petrakis, S.; Evangelidis, C.P.; Alexopoulos, J.; Karastathis, V.; et al. The 27 September 2021 Earthquake in Central Crete (Greece)—Detailed Analysis of the Earthquake Sequence and Indications for Contemporary Arc-Parallel Extension to the Hellenic Arc. Appl. Sci. 2022, 12, 2815. [Google Scholar] [CrossRef]
- Kaviris, G.; Papadimitriou, P.; Makropoulos, K. Magnitude Scales in Central Greece. Bull. Geol. Soc. Greece 2007, 40, 1114–1124. [Google Scholar] [CrossRef] [Green Version]
- Papadimitriou, P.; Kaviris, G.; Makropoulos, K. Evidence of Shear-Wave Splitting in the Eastern Corinthian Gulf (Greece). Phys. Earth Planet. Int. 1999, 114, 3–13. [Google Scholar] [CrossRef]
- Papadimitriou, P.; Kaviris, G.; Karakonstantis, A.; Makropoulos, K. The Cornet Seismological Network: 10 Years of Operation, Recorded Seismicity and Significant Applications. Hell. J. Geosci. 2010, 45, 193–208. [Google Scholar]
- Kaviris, G. Study of Seismic Source Properties of the Eastern Gulf of Corinth. Ph.D. Thesis, National and Kapodistrian University of Athens, Athens, Greece, 2003. [Google Scholar]
- Lyon-Caen, H.; Papadimitriou, P.; Deschamps, A.; Bernard, P.; Makropoulos, K.; Pacchiani, F.; Patau, G. First Results of the CRLN Seismic Network in the Western Corinth Rift: Evidence for Old-Fault Reactivation. C. R. Geosci. 2004, 336, 343–351. [Google Scholar] [CrossRef] [Green Version]
- Duverger, C.; Lambotte, S.; Bernard, P.; Lyon-Caen, H.; Deschamps, A.; Nercessian, A. Dynamics of Microseismicity and Its Relationship with the Active Structures in the Western Corinth Rift (Greece). Geophys. J. Int. 2018, 215, 196–221. [Google Scholar] [CrossRef]
- Kapetanidis, V.; Michas, G.; Kaviris, G.; Vallianatos, F. Spatiotemporal Properties of Seismicity and Variations of Shear-Wave Splitting Parameters in the Western Gulf of Corinth (Greece). Appl. Sci. 2021, 11, 6573. [Google Scholar] [CrossRef]
- Kaviris, G.; Kapetanidis, V.; Kravvariti, P.; Karakonstantis, A.; Bozionelos, G.; Papadimitriou, P.; Voulgaris, N.; Makropoulos, K. Anisotropy Study in Villia (E. Corinth Gulf, Greece), 2nd ed.; ECEES: Istanbul, Turkey, 2014. [Google Scholar]
- Mesimeri, M.; Karakostas, V.; Papadimitriou, E.; Tsaklidis, G.; Jacobs, K. Relocation of Recent Seismicity and Seismotectonic Properties in the Gulf of Corinth (Greece). Geophys. J. Int. 2018, 212, 1123–1142. [Google Scholar] [CrossRef] [Green Version]
- Jackson, J.A.; Gagnepain, J.; Houseman, G.; King, G.C.P.; Papadimitriou, P.; Soufleris, C.; Virieux, J. Seismicity, Normal Faulting, and the Geomorphological Development of the Gulf of Corinth (Greece): The Corinth Earthquakes of February and March 1981. Earth Planet. Sci. Lett. 1982, 57, 377–397. [Google Scholar] [CrossRef]
- Michas, G.; Kapetanidis, V.; Spingos, I.; Kaviris, G.; Vallianatos, F. The 2020 Perachora Peninsula Earthquake Sequence (Εast Corinth Rift, Greece): Spatiotemporal Evolution and Implications for the Triggering Mechanism. Acta Geophys. 2022, 70, 2581–2601. [Google Scholar] [CrossRef]
- Chamberlain, C.J.; Hopp, C.J.; Boese, C.M.; Warren-Smith, E.; Chambers, D.; Chu, S.X.; Michailos, K.; Townend, J. EQcorrscan: Repeating and Near-Repeating Earthquake Detection and Analysis in Python. Seismol. Res. Lett. 2018, 89, 173–181. [Google Scholar] [CrossRef]
- Ross, Z.E.; Trugman, D.T.; Hauksson, E.; Shearer, P.M. Searching for Hidden Earthquakes in Southern California. Science 2019, 364, 767–771. [Google Scholar] [CrossRef] [Green Version]
- Schaff, D.P.; Richards, P.G. On Finding and Using Repeating Seismic Events in and near China. J. Geophys. Res. 2011, 116, B03309. [Google Scholar] [CrossRef]
- Schaff, D.P.; Waldhauser, F. One Magnitude Unit Reduction in Detection Threshold by Cross Correlation Applied to Parkfield (California) and China Seismicity. Bull. Seismol. Soc. Am. 2010, 100, 3224–3238. [Google Scholar] [CrossRef] [Green Version]
- Warren-Smith, E.; Chamberlain, C.J.; Lamb, S.; Townend, J. High-Precision Analysis of an Aftershock Sequence Using Matched-Filter Detection: The 4 May 2015 M L 6 Wanaka Earthquake, Southern Alps, New Zealand. Seismol. Res. Lett. 2017, 88, 1065–1077. [Google Scholar] [CrossRef]
- Huang, Y.; Beroza, G.C. Temporal Variation in the Magnitude-frequency Distribution during the Guy-Greenbrier Earthquake Sequence. Geophys. Res. Lett. 2015, 42, 6639–6646. [Google Scholar] [CrossRef]
- Herath, P.; Attanayake, J.; Gahalaut, K. A Reservoir Induced Earthquake Swarm in the Central Highlands of Sri Lanka. Sci. Rep. 2022, 12, 18251. [Google Scholar] [CrossRef]
- Chmiel, M.; Godano, M.; Piantini, M.; Brigode, P.; Gimbert, F.; Bakker, M.; Courboulex, F.; Ampuero, J.-P.; Rivet, D.; Sladen, A.; et al. Brief Communication: Seismological Analysis of Flood Dynamics and Hydrologically Triggered Earthquake Swarms Associated with Storm Alex. Nat. Hazards Earth Syst. Sci. 2022, 22, 1541–1558. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic Earthquake Recognition and Timing from Single Traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar] [CrossRef]
- Minetto, R.; Helmstetter, A.; Schwartz, S.; Langlais, M.; Nomade, J.; Guéguen, P. Analysis of the Spatiotemporal Evolution of the Maurienne Swarm (French Alps) Based on Earthquake Clustering. Earth Space Sci. 2022, 9, e2021EA002097. [Google Scholar] [CrossRef]
- Stabile, T.A.; Vlček, J.; Wcisło, M.; Serlenga, V. Analysis of the 2016–2018 Fluid-Injection Induced Seismicity in the High Agri Valley (Southern Italy) from Improved Detections Using Template Matching. Sci. Rep. 2021, 11, 20630. [Google Scholar] [CrossRef]
- Kapetanidis, V.; Papadimitriou, P. Estimation of Arrival-Times in Intense Seismic Sequences Using a Master-Events Methodology Based on Waveform Similarity: Master-Events Method Using Waveform Similarity. Geophys. J. Int. 2011, 187, 889–917. [Google Scholar] [CrossRef] [Green Version]
- Gutenberg, B.; Richter, C.F. Frequency of Earthquakes in California. Bull. Seismol. Soc. Am. 1944, 34, 185–188. [Google Scholar] [CrossRef]
- Wyss, M.; Pacchiani, F.; Deschamps, A.; Patau, G. Mean Magnitude Variations of Earthquakes as a Function of Depth: Different Crustal Stress Distribution Depending on Tectonic Setting. Geophys. Res. Lett. 2008, 35, L01307. [Google Scholar] [CrossRef] [Green Version]
- Scholz, C.H. The Frequency-Magnitude Relation of Microfracturing in Rock and Its Relation to Earthquakes. Bull. Seismol. Soc. Am. 1968, 58, 399–415. [Google Scholar] [CrossRef]
- Schorlemmer, D.; Wiemer, S.; Wyss, M. Variations in Earthquake-Size Distribution across Different Stress Regimes. Nature 2005, 437, 539–542. [Google Scholar] [CrossRef] [PubMed]
- University of Athens. Hellenic Seismological Network, University of Athens, Seismological Laboratory [Data Set]. Int. Fed. Digit. Seismogr. Netw. 2008. [Google Scholar] [CrossRef]
- University of Patras. University of Patras, Seismological Laboratory [Data Set]. Int. Fed. Digit. Seismogr. Netw. 2000. [Google Scholar] [CrossRef]
- Ganas, A.; Oikonomou, I.A.; Tsimi, C. NOAfaults: A Digital Database for Active Faults in Greece. Bull. Geol. Soc. Greece 2013, 47, 518. [Google Scholar] [CrossRef] [Green Version]
- Ganas, A. NOAFAULTS KMZ Layer Version 4.0 (V4.0) [Data Set]. Zenodo 2022. [Google Scholar] [CrossRef]
- Spingos, I.; Kapetanidis, V.; Michas, G.; Kaviris, G.; Vallianatos, F. Shear-Wave Splitting Patterns in Perachora (Eastern Gulf of Corinth, Greece). Ann. Geophys. 2023; accepted. [Google Scholar]
- Waldhauser, F. HypoDD—A Program to Compute Double-Difference Hypocenter Locations; U.S. Geological Survey Open-File Report 01-113; U.S. Geological Survey: Reston, VA, USA, 2001; p. 99. Available online: https://pubs.usgs.gov/of/2001/0113/ (accessed on 28 February 2023).
- Evangelidis, C.P.; Triantafyllis, N.; Samios, M.; Boukouras, K.; Kontakos, K.; Ktenidou, O.-J.; Fountoulakis, I.; Kalogeras, I.; Melis, N.S.; Galanis, O.; et al. Seismic Waveform Data from Greece and Cyprus: Integration, Archival, and Open Access. Seismol. Res. Lett. 2021, 92, 1672–1684. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Ellsworth, W.L.; Zhu, W.; Chuang, L.Y.; Beroza, G.C. Earthquake Transformer—An Attentive Deep-Learning Model for Simultaneous Earthquake Detection and Phase Picking. Nat. Commun. 2020, 11, 3952. [Google Scholar] [CrossRef]
- Kissling, E.; Ellsworth, W.L.; Eberhart-Phillips, D.; Kradolfer, U. Initial Reference Models in Local Earthquake Tomography. J. Geophys. Res. 1994, 99, 19635–19646. [Google Scholar] [CrossRef] [Green Version]
- Schaff, D.P.; Richards, P.G. Improvements in Magnitude Precision, Using the Statistics of Relative Amplitudes Measured by Cross Correlation. Geophys. J. Int. 2014, 197, 335–350. [Google Scholar] [CrossRef] [Green Version]
- Gibbons, S.J.; Ringdal, F. The Detection of Low Magnitude Seismic Events Using Array-Based Waveform Correlation. Geophys. J. Int. 2006, 165, 149–166. [Google Scholar] [CrossRef] [Green Version]
- Wiemer, S.; Wyss, M. Minimum Magnitude of Completeness in Earthquake Catalogs: Examples from Alaska, the Western United States, and Japan. Bull. Seismol. Soc. Am. 2000, 90, 859–869. [Google Scholar] [CrossRef]
- Bender, B. Maximum Likelihood Estimation of b Values for Magnitude Grouped Data. Bull. Seismol. Soc. Am. 1983, 73, 831–851. [Google Scholar] [CrossRef]
- Shi, Y.; Bolt, B.A. The Standard Error of the Magnitude-Frequency b Value. Bull. Seismol. Soc. Am. 1982, 72, 1677–1687. [Google Scholar] [CrossRef]
- Herrmann, M.; Marzocchi, W. Inconsistencies and Lurking Pitfalls in the Magnitude–Frequency Distribution of High-Resolution Earthquake Catalogs. Seismol. Res. Lett. 2021, 92, 909–922. [Google Scholar] [CrossRef]
- Kaviris, G.; Zymvragakis, A.; Bonatis, P.; Kapetanidis, V.; Voulgaris, N. Probabilistic and Scenario-Based Seismic Hazard Assessment on the Western Gulf of Corinth (Central Greece). Appl. Sci. 2022, 12, 11152. [Google Scholar] [CrossRef]
- Kaviris, G.; Zymvragakis, A.; Bonatis, P.; Sakkas, G.; Kouskouna, V.; Voulgaris, N. Probabilistic Seismic Hazard Assessment for the Broader Messinia (SW Greece) Region. Pure Appl. Geophys. 2022, 179, 551–567. [Google Scholar] [CrossRef]
- Marzocchi, W.; Sandri, L. A Review and New Insights on the Estimation of the B-Value and Its Uncertainty. Ann. Geophys. 2009, 46, 1271–1282. [Google Scholar] [CrossRef]
- Woessner, J.; Wiemer, S. Assessing the Quality of Earthquake Catalogues: Estimating the Magnitude of Completeness and Its Uncertainty. Bull. Seismol. Soc. Am. 2005, 95, 684–698. [Google Scholar] [CrossRef]
- Hanks, T.C.; Kanamori, H. A Moment Magnitude Scale. J. Geophys. Res. 1979, 84, 2348. [Google Scholar] [CrossRef]
- Nakahara, H. Correlation Distance of Waveforms for Closely Located Events-I. Implication of the Heterogeneous Structure around the Source Region of the 1995 Hyogo-Ken Nanbu, Japan, Earthquake (Mw = 6.9). Geophys. J. Int. 2004, 157, 1255–1268. [Google Scholar] [CrossRef] [Green Version]
- Kagan, Y.Y.; Jackson, D.D. Long-Term Earthquake Clustering. Geophys. J. Int. 1991, 104, 117–134. [Google Scholar] [CrossRef] [Green Version]
- Lengliné, O.; Marsan, D. Inferring the Coseismic and Postseismic Stress Changes Caused by the 2004 Mw = 6 Parkfield Earthquake from Variations of Recurrence Times of Microearthquakes. J. Geophys. Res. 2009, 114, B10303. [Google Scholar] [CrossRef]
- Michas, G.; Vallianatos, F. Stochastic Modeling of Nonstationary Earthquake Time Series with Long-Term Clustering Effects. Phys. Rev. E 2018, 98, 042107. [Google Scholar] [CrossRef]
- Vallianatos, F.; Papadakis, G.; Michas, G. Generalized Statistical Mechanics Approaches to Earthquakes and Tectonics. Proc. R. Soc. A 2016, 472, 20160497. [Google Scholar] [CrossRef] [Green Version]
- Tsallis, C. Introduction to Nonextensive Statistical Mechanics; Springer: New York, NY, USA, 2009; ISBN 978-0-387-85358-1. [Google Scholar]
- Michas, G.; Pavlou, K.; Avgerinou, S.-E.; Anyfadi, E.-A.; Vallianatos, F. Aftershock Patterns of the 2021 Mw 6.3 Northern Thessaly (Greece) Earthquake. J. Seismol. 2022, 26, 201–225. [Google Scholar] [CrossRef]
- Michas, G.; Vallianatos, F.; Sammonds, P. Non-Extensivity and Long-Range Correlations in the Earthquake Activity at the West Corinth Rift (Greece). Nonlinear Process. Geophys. 2013, 20, 713–724. [Google Scholar] [CrossRef] [Green Version]
- Michas, G.; Vallianatos, F. Scaling Properties, Multifractality and Range of Correlations in Earthquake Timeseries: Are Earthquakes Random? In Statistical Methods and Modeling of Seismogenesis; Limnios, N., Papadimitriou, E., Tsaklidis, G., Eds.; ISTE, Ltd.: London, UK; Wiley: Hoboken, NJ, USA, 2021; ISBN 978-1-119-82505-0. [Google Scholar]
- Daniels, C.; Peng, Z. A 15-Year-Long Catalog of Seismicity in the Eastern Tennessee Seismic Zone (ETSZ) Using Matched Filter Detection. Earthq. Res. Adv. 2022, 1, 100198. [Google Scholar] [CrossRef]
- McNutt, S.R. Volcanic Seismology. Annu. Rev. Earth Planet. Sci. 2005, 33, 461–491. [Google Scholar] [CrossRef] [Green Version]
- Shapiro, S.A.; Krüger, O.S.; Dinske, C.; Langenbruch, C. Magnitudes of Induced Earthquakes and Geometric Scales of Fluid-Stimulated Rock Volumes. Geophysics 2011, 76, WC55–WC63. [Google Scholar] [CrossRef]
- Mogi, K. Study of Elastic Shocks Caused by the Fracture of Heterogeneous Materials and Its Relations to Earthquake Phenomena. Bull. Earthq. Res. Inst. Tokyo Univ. 1962, 40, 125–173. [Google Scholar]
- Wyss, M. Towards a Physical Understanding of the Earthquake Frequency Distribution. Geophys. J. Int. 1973, 31, 341–359. [Google Scholar] [CrossRef] [Green Version]
- Frohlich, C.; Davis, S.D. Teleseismic b Values; Or, Much Ado about 1.0. J. Geophys. Res. 1993, 98, 631–644. [Google Scholar] [CrossRef]
- Herrmann, M.; Kraft, T.; Tormann, T.; Scarabello, L.; Wiemer, S. A Consistent High-Resolution Catalog of Induced Seismicity in Basel Based on Matched Filter Detection and Tailored Post-Processing. J. Geophys. Res. Solid Earth 2019, 124, 8449–8477. [Google Scholar] [CrossRef] [Green Version]
- Scholz, C.H. On the Stress Dependence of the Earthquake b Value. Geophys. Res. Lett. 2015, 42, 1399–1402. [Google Scholar] [CrossRef] [Green Version]
- Mesimeri, M.; Karakostas, V. Repeating Earthquakes in Western Corinth Gulf (Greece): Implications for Aseismic Slip near Locked Faults. Geophys. J. Int. 2018, 215, 659–676. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. New, Improved Version of Generic Mapping Tools Released. Eos Trans. AGU 1998, 79, 579. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Catalog | Description | Mmin | Mc | Total Events | Events with M ≥ Mc |
|---|---|---|---|---|---|
| CAT1 | Templates (relocated) | 0.6 | 1.6 | 879 | 458 |
| CAT11–3 | >> (groups 1–3) | 0.6 | 1.6 | 356 | 205 |
| CAT2 | Templates + single-station (LTK)/single-channel (Z) detections, fixed to template hypocenters | −1.4 | −0.1 | 24,402 | 17,204 |
| CAT21–3 | >> (groups 1–3) | −1.4 | 0.0 | 22,373 | 12,861 |
| CAT3 | Templates + multi-channel detections, relocated | −0.8 | 1.4 | 8527 * | 4294 |
| CAT31–3 | >> (groups 1–3) | −0.8 | 0.9 | 6128 ** | 1147 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapetanidis, V.; Michas, G.; Spingos, I.; Kaviris, G.; Vallianatos, F. Cluster Analysis of Seismicity in the Eastern Gulf of Corinth Based on a Waveform Template Matching Catalog. Sensors 2023, 23, 2923. https://doi.org/10.3390/s23062923
Kapetanidis V, Michas G, Spingos I, Kaviris G, Vallianatos F. Cluster Analysis of Seismicity in the Eastern Gulf of Corinth Based on a Waveform Template Matching Catalog. Sensors. 2023; 23(6):2923. https://doi.org/10.3390/s23062923
Chicago/Turabian StyleKapetanidis, Vasilis, Georgios Michas, Ioannis Spingos, George Kaviris, and Filippos Vallianatos. 2023. "Cluster Analysis of Seismicity in the Eastern Gulf of Corinth Based on a Waveform Template Matching Catalog" Sensors 23, no. 6: 2923. https://doi.org/10.3390/s23062923