
Sensing Mechanisms of Rough Plasmonic Surfaces for Protein Binding of Surface Plasmon Resonance Detection

Abstract
:1. Introduction
2. Materials and Methods
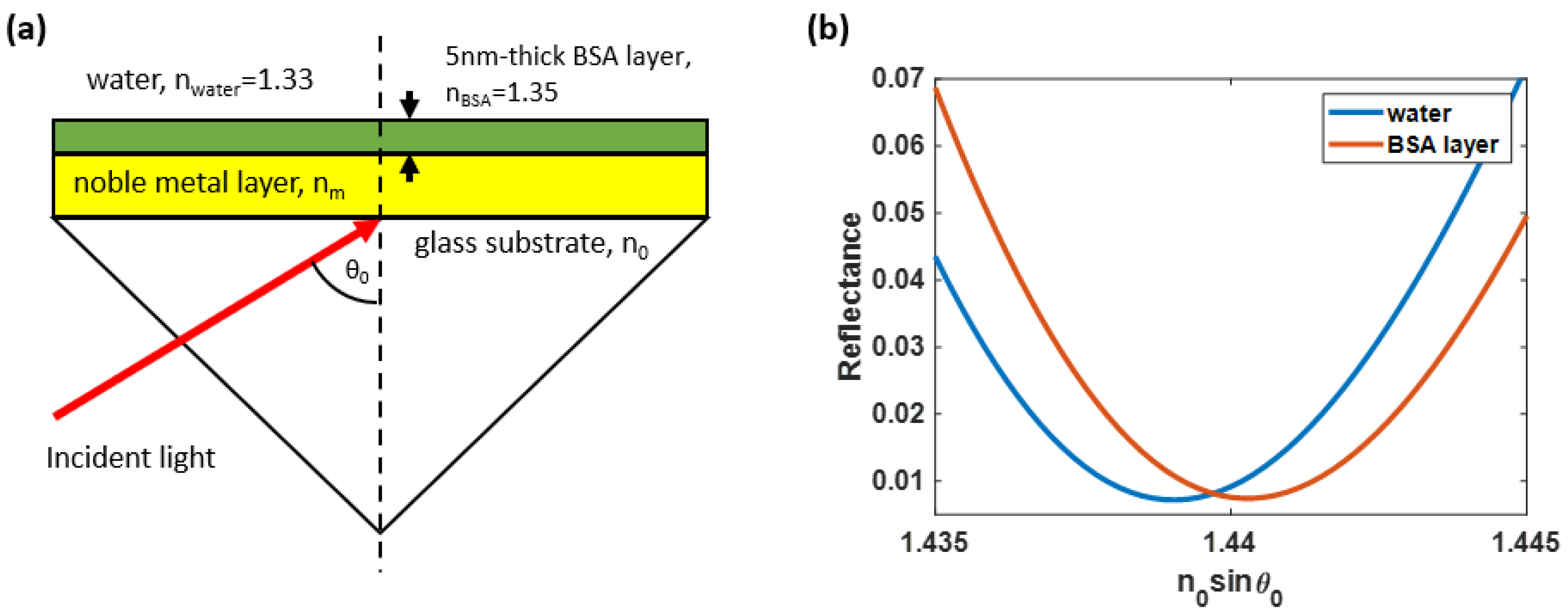
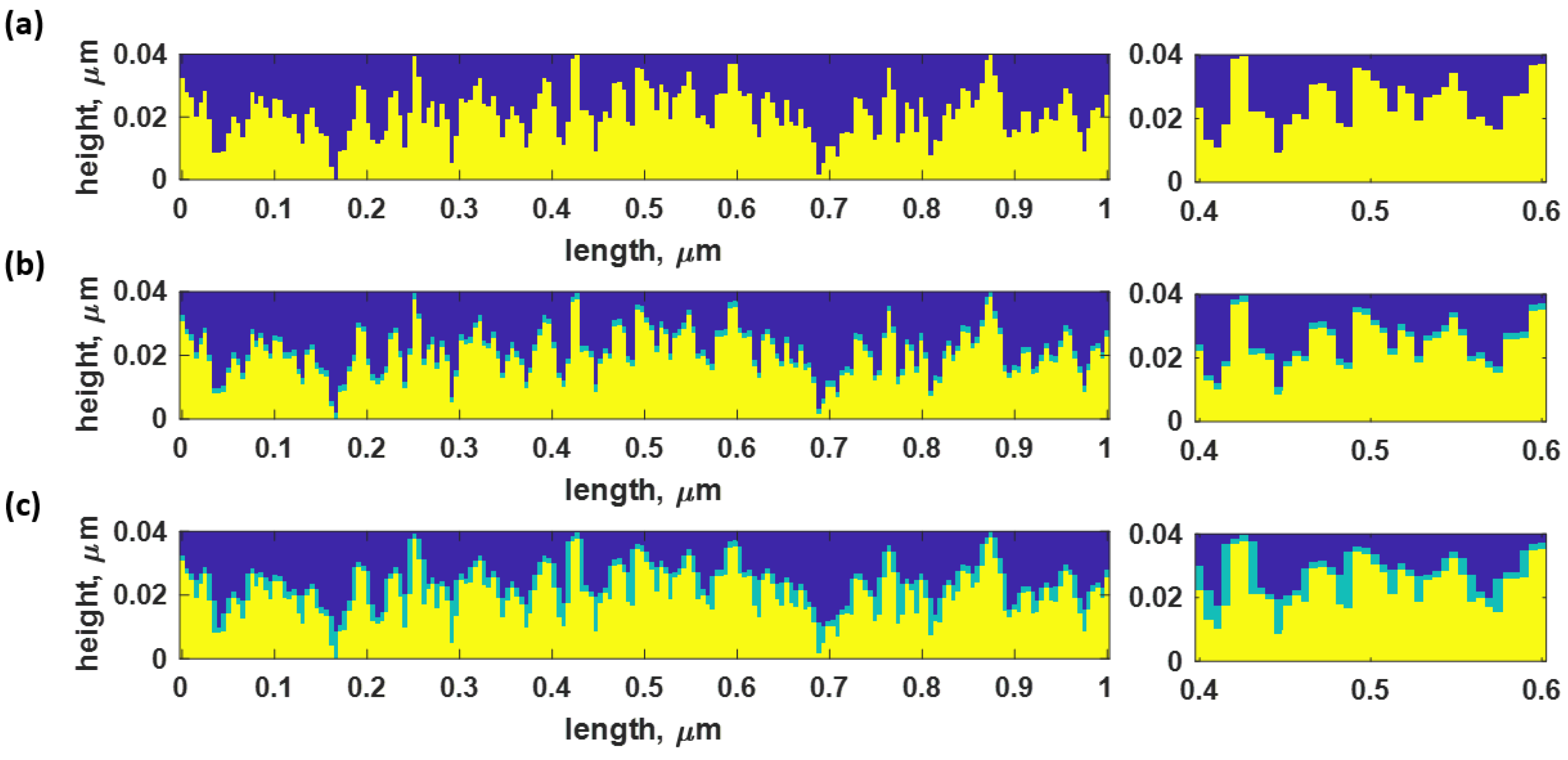
2.1. Rough Surface Model and Simulated Structures
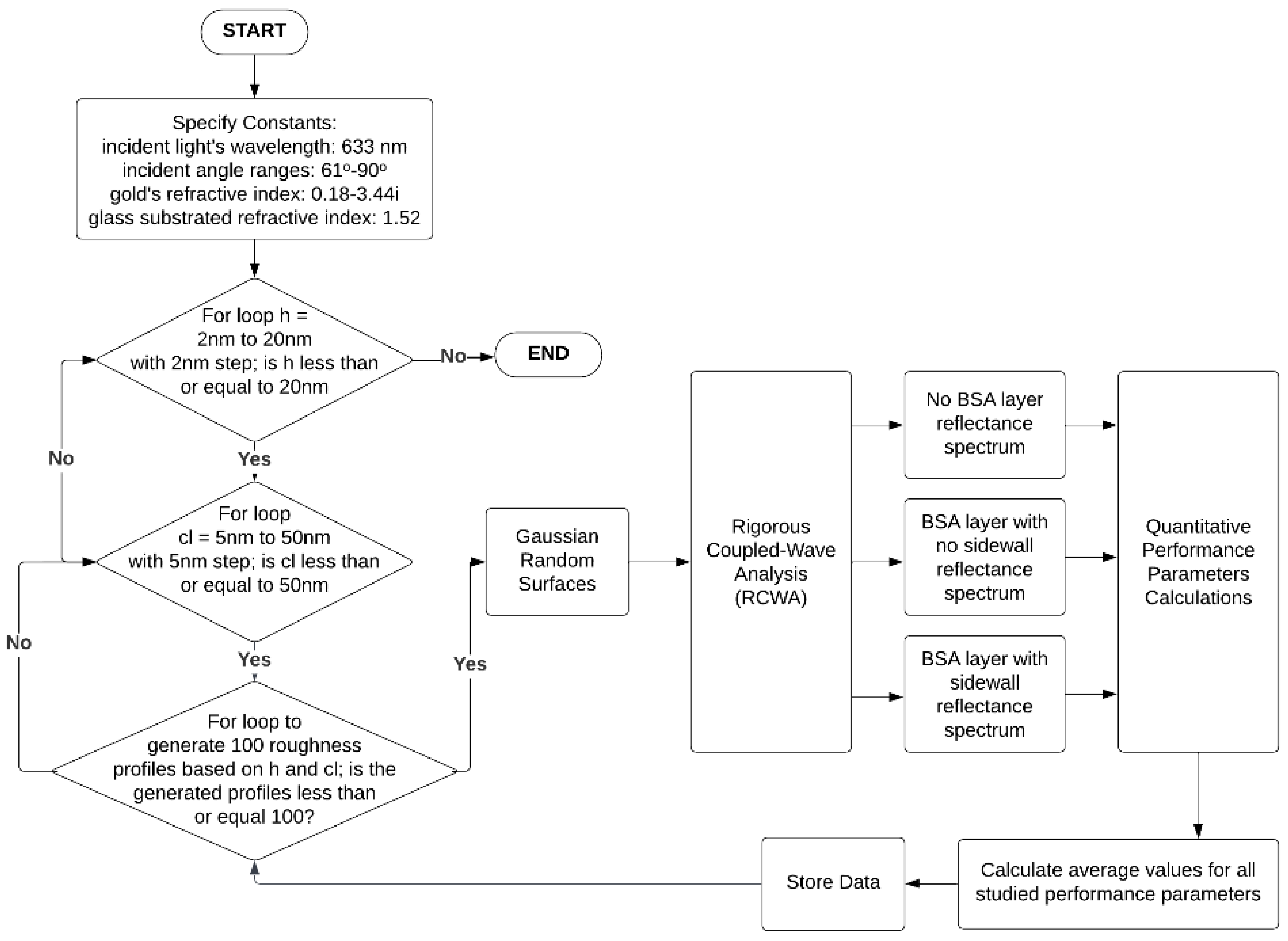
2.2. Simulation of the Surface Plasmon Resonance Detection
2.3. Quantitative Performance Parameters
- (1)
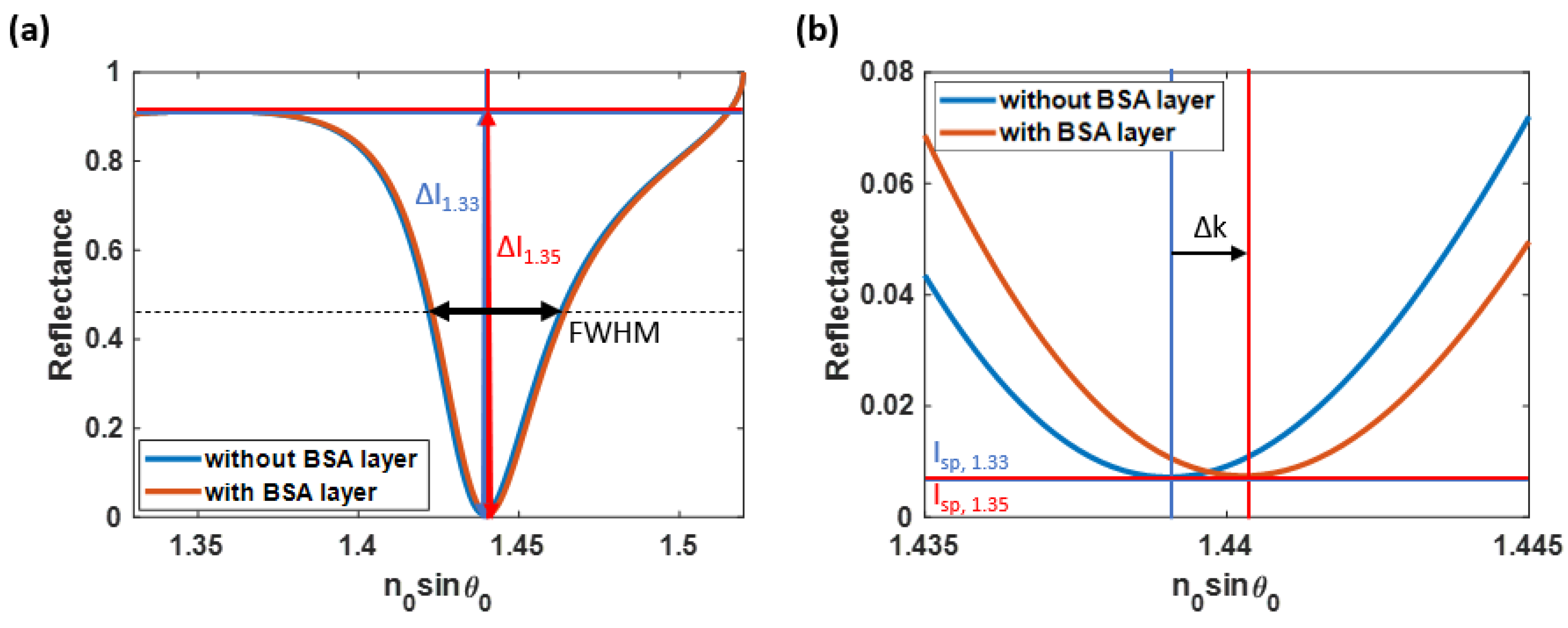
- The sensitivity (S) was calculated by dividing the change in the plasmonic wave vector (k), also known as the plasmonic shifting distance, by the product of the protein layer thickness and the difference in the binding region’s refractive indices, as shown in Equation (1) and Figure 5b.
- (2)
- The n0sinθsp indicates the angular position at the minimum plasmonic intensity dip (Isp), which can be used to analyze the sensor’s detection range.
- (3)
- The FWHM in this manuscript was calculated as the average width of the two plasmonic dips, measured at 50% of the reflectance spectra’s intensity, as expressed in Equation (2). Figure 5a illustrates the FWHM of the SPR curves, depicted as a black arrow considering the unsymmetrical nature of SPR dips.
- (4)
- The ΔI is one of the unique parameters which helps to determine the quality of the surface plasmon resonance-based sensor. It can be calculated as the average difference between the reflectance at the plasmonic angle and the intensity at the critical angle of the reflectance spectra, as expressed in Equation (3) and illustrated in Figure 5a.The terms ΔIwater and ΔIBSA are the difference in the intensity at the plasmonic angles of the reflectance spectra detected when the 5 nm thick BSA binding layer is absent and present, respectively.
- (5)
- The Isp is another factor for considering the sensor’s performance. It can be defined as the average of the reflectance values at the plasmonic angles as expressed in Equation (4) and shown in Figure 5b.
- (6)
- FoM encapsulates an overall sensor quality, usually defined as a ratio between the S and the FWHM [54], as expressed in Equation (5).It is interesting to point out that the FoM depends on the detection mechanism for intensity-based measurement; the FoM is calculated based on the S and FWHM and can also be related to intensity parameters, such as ΔI and Isp, and considering the shot noise model [55], as expressed in Equation (6).
2.4. Enhancement Ratio
3. Results
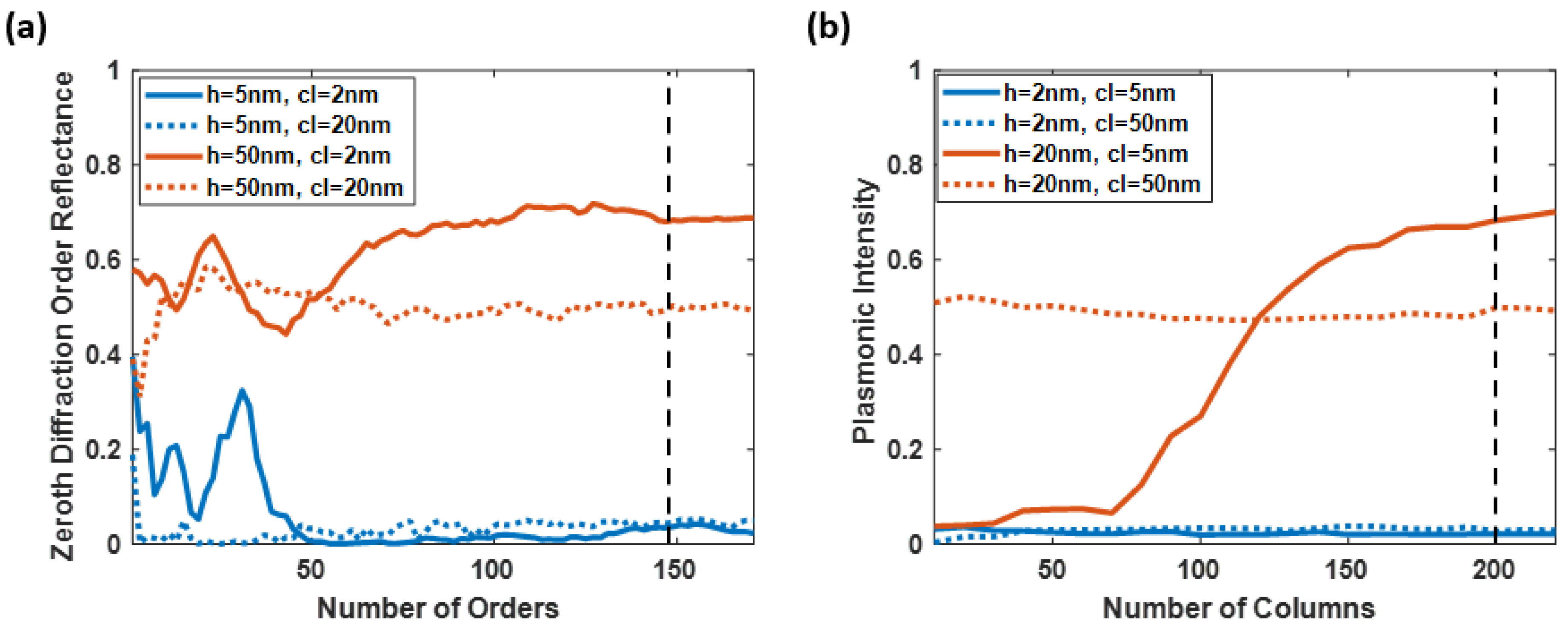
3.1. Convergence Test for Extreme Cases
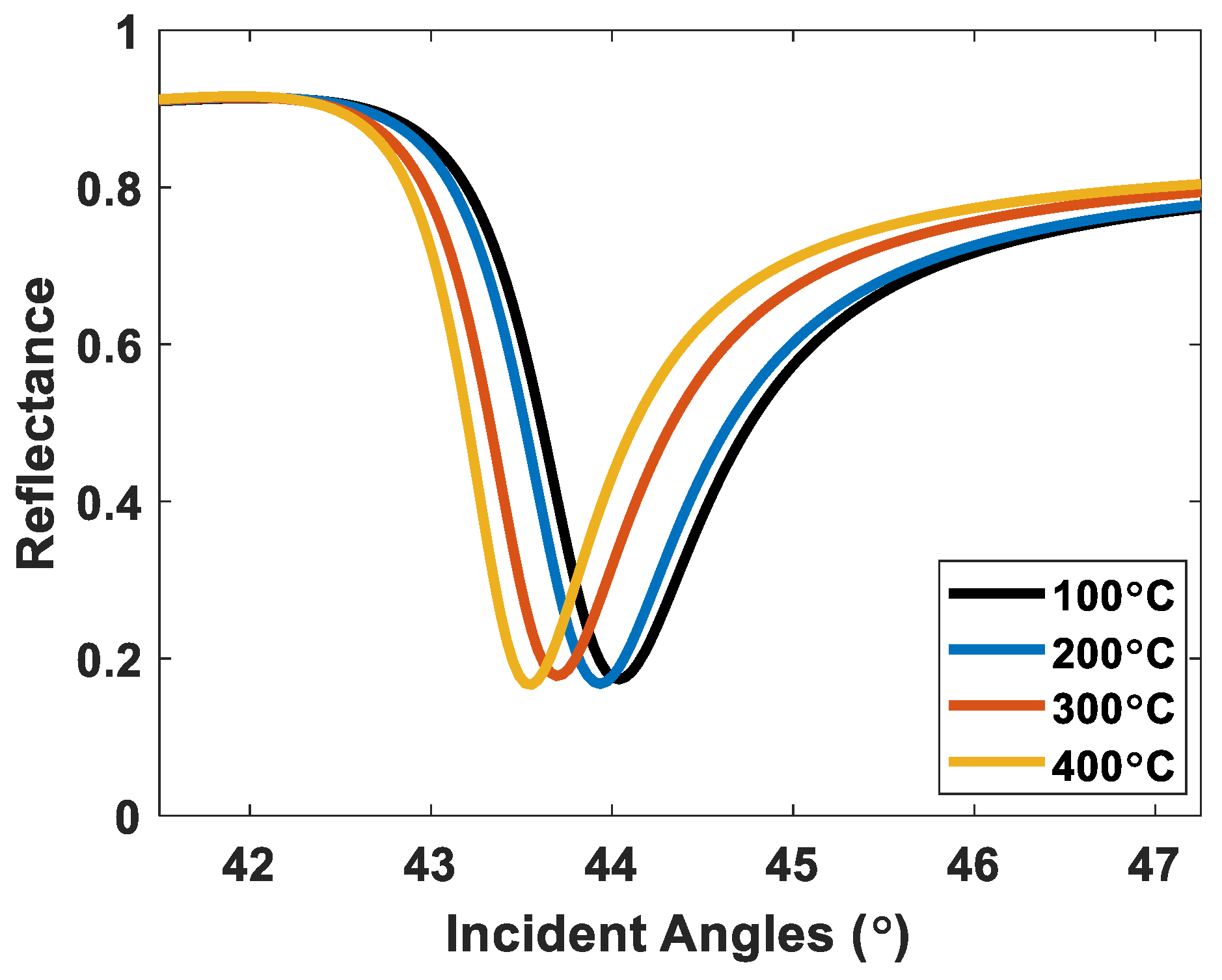
3.2. Comparison between the Proposed RCWA Simulation and Monte Carlo-Based Method and Reported Experimental Results in the Literature
3.3. Quantitative Performance Parameters of SPR Sensors at Different Roughness Levels
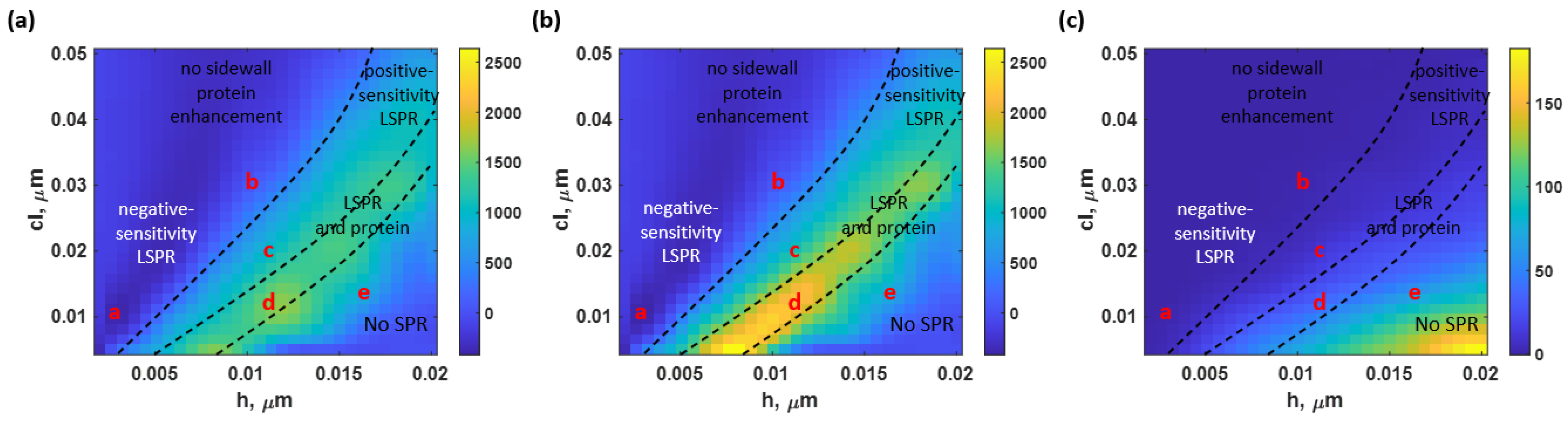
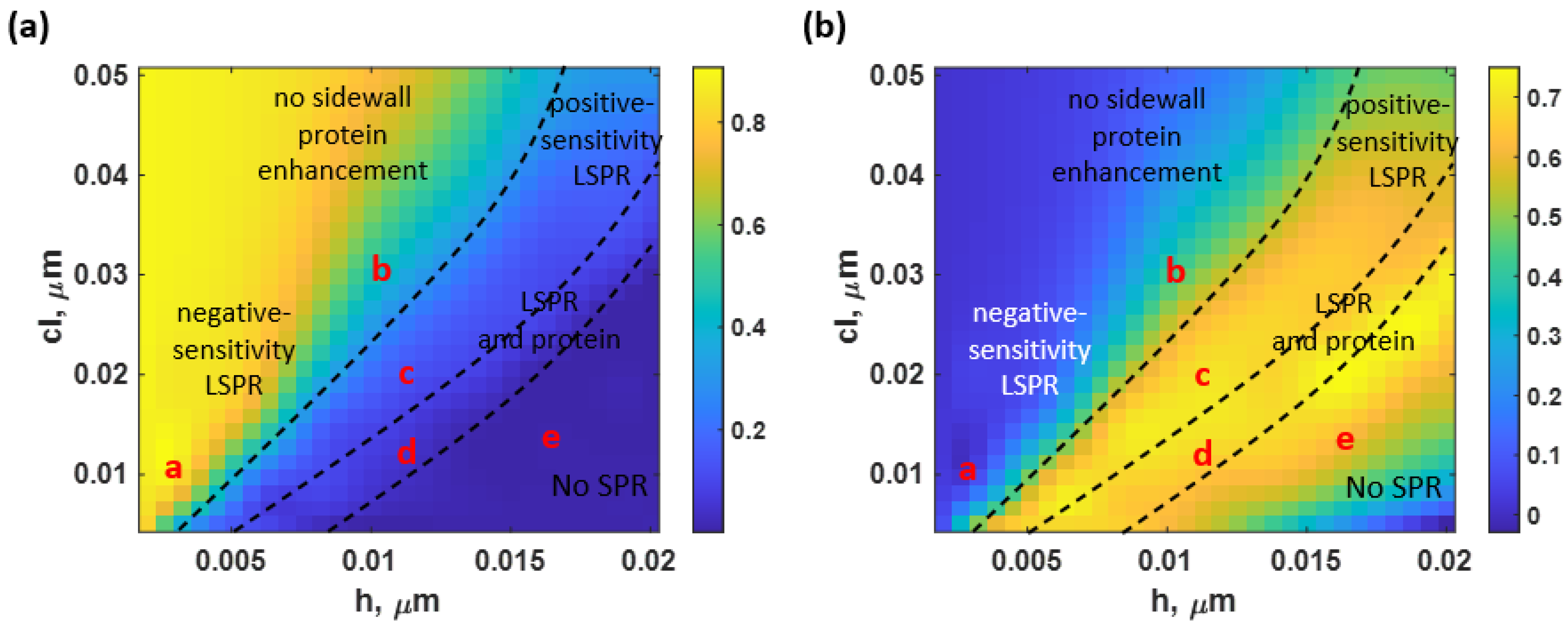
- (1)
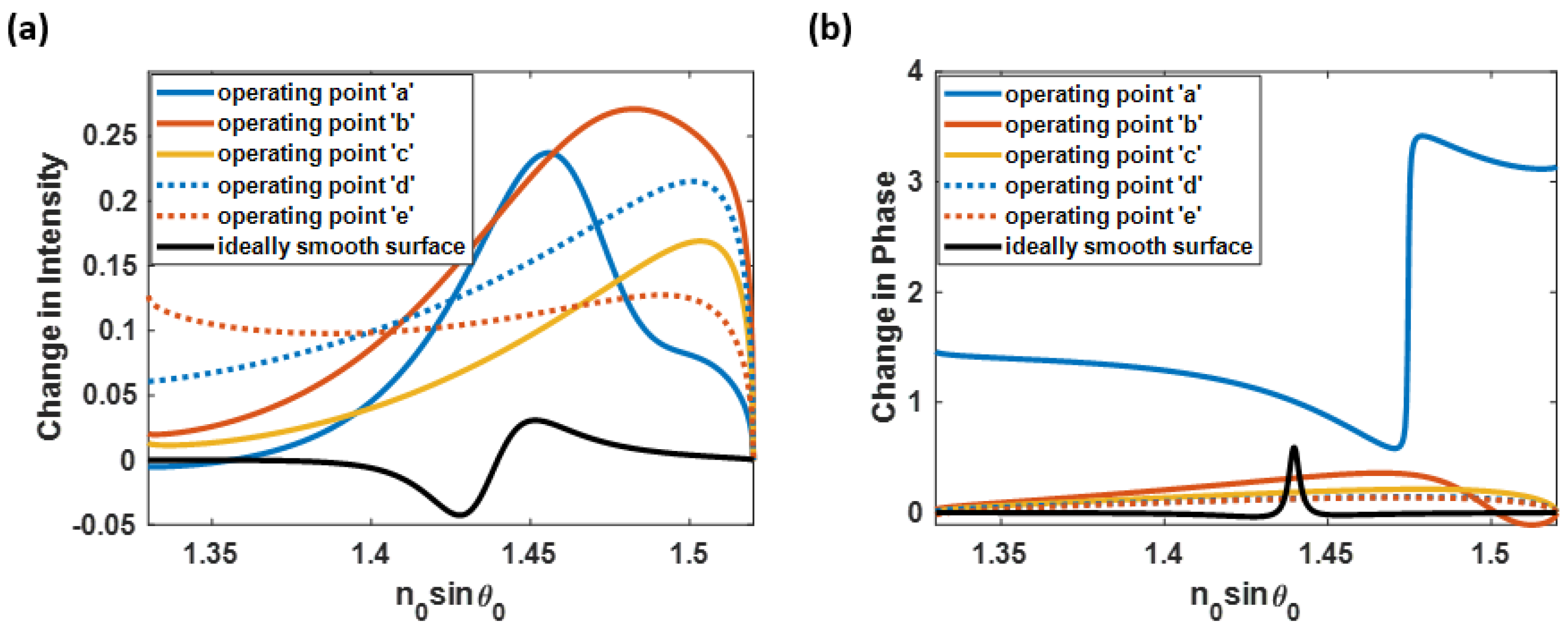
- The “no sidewall protein enhancement” corresponds to the region where the letters ‘a’ and ‘b’ are in Figure 8. This area indicated the roughness levels in which the sidewall BSA was negligible. The protein lying on top of the rough surfaces overlapped the sidewall protein. Moreover, two types of SPR results were investigated in this region: the negative-sensitivity LSPR and the degraded-sensitivity reflectance spectra, as illustrated as the operating point ‘a’ and ‘b’, respectively. The negative plasmonic dip shifting means the plasmonic angle shifts towards a lower plasmonic resonance angle when the sample refractive index increases. It is established that this is due to the adverse diffraction orders of gratings or scattering surfaces [57]. The reflectance spectra at the operating point ‘a’ (h and cl of 3 nm and 10 nm, respectively), as shown in Figure 9a, had an S of −379.88 rad/μm2; approximately threefold of the magnitude of the S acquired from the ideal uniform sensor. Within the same region but at rougher surfaces, with h of 10 nm and cl of 30 nm (operating point ‘b’), the S returned to the positive value but degraded to 85.31 rad/μm2, indicating a 30.41% decrease in the sensitivity. The averaged reflectance spectra calculated from 100 structure profiles at these roughness levels are shown in Figure 9b;
- (2)
- The “positive-sensitivity LSPR” only described the S affected by the LSPR. Here, the additional protein was presented but had an insignificant effect on the S. The reflectance curves spectra at the operating point ‘c’ obtained at h of 12 nm and cl of 20 nm indicated the enhanced S due to the LSPR wave effect only. Figure 9c illustrates the reflectance spectra at this location. In addition, the two employed models’ curves in this roughness level did not look significantly different due to the small increment of the BSA amount;
- (3)
- The “LSPR and protein” was investigated as the roughness rose. In this region, S of the SPR spectra can improve due to the localized LSPR effect and the presence of an additional protein. The models indicate a significant difference in sensitivity values at the operating point ‘d’, located at h of 9 nm and cl of 8 nm. For the non-sidewall BSA model, the S of 1191.13 rad/μm2 was investigated. In contrast, the BSA sidewall model achieved a significantly higher S of 1608.02 rad/μm2, having a 35.00% increase from the nonsidewall BSA model, as shown in Figure 9d. The binding sensitivity enhancement due to the LSPR was 9.72 times at this roughness level.In contrast, the BSA sidewall model enhanced the S by 13.12 times more than the ideally smooth gold sensor, indicating that the S enhancement due to the increased protein was 3.68 times. In addition, this crucially high S was due to the deterioration of a plasmonic dip structure, resulting in a lower n0sinθsp for the nonprotein coated model, which will be explained in the next part. The S enhancement factor due to additional protein agreed with the estimated protein concentration at the roughness level, as shown in Figure 8c;
- (4)
- At the extreme roughness levels (near the bottom right corner of the contour in Figure 8), the plasmonic dip structure deteriorated, as indicated by the “No SPR” region, due to the scattering loss [58] of the rough surface. The propagation length of surface plasmon polaritons is strongly distorted due to roughness [59], resulting in an undetectable region, as indicated in Figure 9e for the operating point ‘e’ (obtained at h of 16 nm and cl of 15 nm). The plasmonic dips have virtually no intensity contrast. The SPR reflectance dips weakly maintained their structure and distorted at the higher roughness. The increase in protein quantity due to roughness was not the only reason for the improved S but also the enhancement of the LSPR from the roughness peaks. There is a substantial tradeoff between the roughness level, the sensitivity, and the scattering loss of the SPR dip.
4. Discussion
4.1. Effect of LSPR and Sidewall Protein from Roughness
4.2. Intensity and Phase Detection Schemes
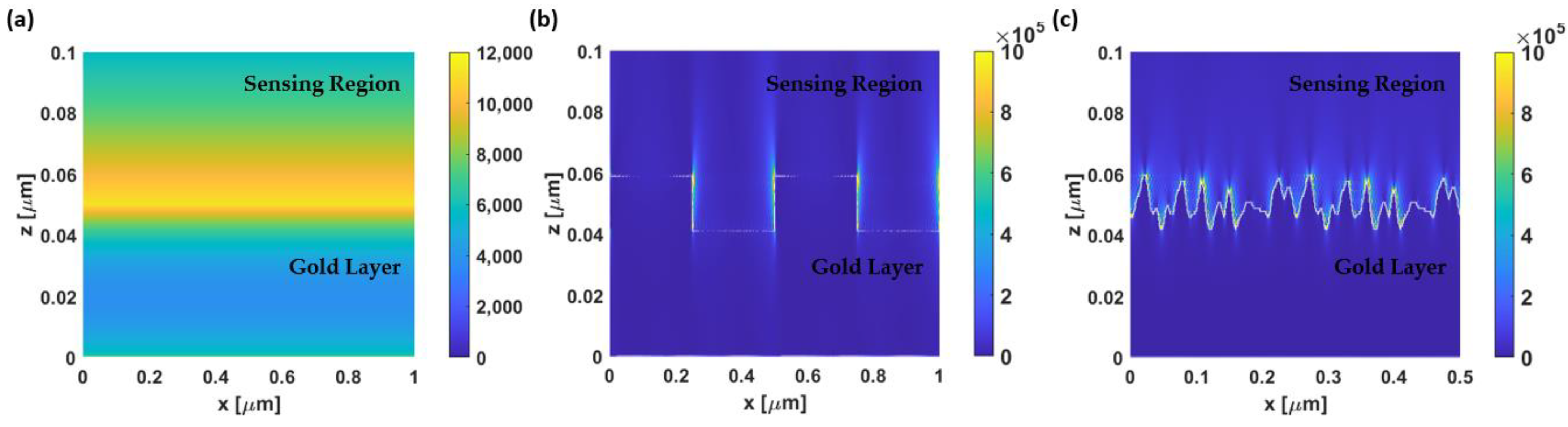
4.3. Field Plots on Exemplary Optical Structures
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brongersma, M.L.; Kik, P.G. Surface Plasmon Nanophotonics; Springer: Dordrecht, The Netherlands, 2007; Volume 131. [Google Scholar]
- Somekh, M.G.; Pechprasarn, S. Surface plasmon, surface wave, and enhanced evanescent wave microscopy. In Handbook of Photonics for Biomedical Engineering; Springer: Dordrecht, The Netherlands, 2017; pp. 503–543. [Google Scholar]
- Homola, J.; Yee, S.S.; Gauglitz, G. Surface plasmon resonance sensors. Sens. Actuators B Chem. 1999, 54, 3–15. [Google Scholar] [CrossRef]
- Suda, Y.; Arano, A.; Fukui, Y.; Koshida, S.; Wakao, M.; Nishimura, T.; Kusumoto, S.; Sobel, M. Immobilization and clustering of structurally defined oligosaccharides for sugar chips: An improved method for surface plasmon resonance analysis of protein-carbohydrate interactions. Bioconjug. Chem. 2006, 17, 1125–1135. [Google Scholar] [CrossRef]
- Mariani, S.; Minunni, M. Surface plasmon resonance applications in clinical analysis. Anal. Bioanal. Chem. 2014, 406, 2303–2323. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Park, B. Label-free screening of foodborne Salmonella using surface plasmon resonance imaging. Anal. Bioanal. Chem. 2018, 410, 5455–5464. [Google Scholar] [CrossRef] [PubMed]
- Douzi, B. Protein–protein interactions: Surface plasmon resonance. In Bacterial Protein Secretion Systems: Methods and Protocols; Humana Press: New York, NY, USA, 2017; pp. 257–275. [Google Scholar]
- Drescher, D.G.; Selvakumar, D.; Drescher, M.J. Analysis of protein interactions by surface plasmon resonance. Adv. Protein Chem. Struct. Biol. 2018, 110, 1–30. [Google Scholar]
- Sangworasil, M.; Pechprasarn, S.; Learkthanakhachon, S.; Ittipornnuson, K.; Suvarnaphaet, P.; Albutt, N. Investigation on feasibility of using surface plasmons resonance (SPR) sensor for ultrasonic detection: A novel optical detection of ultrasonic waves. In Proceedings of the 2016 9th Biomedical Engineering International Conference (BMEiCON), Laung Prabang, Laos, 7–9 December 2016; pp. 1–3. [Google Scholar]
- Shen, M.; Learkthanakhachon, S.; Pechprasarn, S.; Zhang, Y.; Somekh, M.G. Adjustable microscopic measurement of nanogap waveguide and plasmonic structures. Appl. Opt. 2018, 57, 3453–3462. [Google Scholar] [CrossRef] [PubMed]
- Suvarnaphaet, P.; Pechprasarn, S. Enhancement of long-range surface plasmon excitation, dynamic range and figure of merit using a dielectric resonant cavity. Sensors 2018, 18, 2757. [Google Scholar] [CrossRef] [Green Version]
- Suvarnaphaet, P.; Pechprasarn, S. Quantitative cross-platform performance comparison between different detection mechanisms in surface plasmon sensors for voltage sensing. Sensors 2018, 18, 3136. [Google Scholar] [CrossRef] [Green Version]
- De Mol, N.J.; Dekker, F.J.; Broutin, I.; Fischer, M.J.; Liskamp, R.M. Surface plasmon resonance thermodynamic and kinetic analysis as a strategic tool in drug design. Distinct ways for phosphopeptides to plug into Src-and Grb2 SH2 domains. J. Med. Chem. 2005, 48, 753–763. [Google Scholar] [CrossRef] [Green Version]
- Navratilova, I.; Hopkins, A.L. Emerging role of surface plasmon resonance in fragment-based drug discovery. Future Med. Chem. 2011, 3, 1809–1820. [Google Scholar] [CrossRef]
- Chow, T.W.; Pechprasarn, S.; Meng, J.; Somekh, M.G. Single shot embedded surface plasmon microscopy with vortex illumination. Opt. Express 2016, 24, 10797–10805. [Google Scholar] [CrossRef] [PubMed]
- Englebienne, P.; Van Hoonacker, A.; Verhas, M. Surface plasmon resonance: Principles, methods and applications in biomedical sciences. Spectroscopy 2003, 17, 255–273. [Google Scholar] [CrossRef]
- Kretschmann, E.; Raether, H. Radiative decay of non radiative surface plasmons excited by light. Z. Nat. A 1968, 23, 2135–2136. [Google Scholar] [CrossRef]
- Guo, J.; Keathley, P.D.; Hastings, J. Dual-mode surface-plasmon-resonance sensors using angular interrogation. Opt. Lett. 2008, 33, 512–514. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Y.; Zhou, J.; Wang, X.; Cai, Z.; Shao, Y. Wavelength-scanning surface plasmon resonance microscopy: A novel tool for real time sensing of cell-substrate interactions. Biosens. Bioelectron. 2019, 145, 111717. [Google Scholar] [CrossRef] [PubMed]
- Ran, B.; Lipson, S. Comparison between sensitivities of phase and intensity detection in surface plasmon resonance. Opt. Express 2006, 14, 5641–5650. [Google Scholar] [CrossRef]
- Kabashin, A.V.; Patskovsky, S.; Grigorenko, A.N. Phase and amplitude sensitivities in surface plasmon resonance bio and chemical sensing. Opt. Express 2009, 17, 21191–21204. [Google Scholar] [CrossRef] [PubMed]
- Barer, R.; Tkaczyk, S. Refractive index of concentrated protein solutions. Nature 1954, 173, 821–822. [Google Scholar] [CrossRef]
- Crowell, J.; Ritchie, R. Surface-plasmon effect in the reflectance of a metal. JOSA 1970, 60, 794–799. [Google Scholar] [CrossRef]
- Braundmeier, A., Jr.; Arakawa, E. Effect of surface roughness on surface plasmon resonance absorption. J. Phys. Chem. Solids 1974, 35, 517–520. [Google Scholar] [CrossRef]
- Rahman, T.S.; Maradudin, A.A. Surface-plasmon dispersion relation in the presence of surface roughness. Phys. Rev. B 1980, 21, 2137. [Google Scholar] [CrossRef]
- Hoffmann, A.; Lenkefi, Z.; Szentirmay, Z. Effect of roughness on surface plasmon scattering in gold films. J. Phys. Condens. Matter 1998, 10, 5503. [Google Scholar] [CrossRef]
- Kurihara, K.; Suzuki, K. Theoretical understanding of an absorption-based surface plasmon resonance sensor based on Kretchmann’s theory. Anal. Chem. 2002, 74, 696–701. [Google Scholar] [CrossRef]
- Treebupachatsakul, T.; Shinnakerdchoke, S.; Pechprasarn, S. Analysis of effects of surface roughness on sensing performance of surface plasmon resonance detection for refractive index sensing application. Sensors 2021, 21, 6164. [Google Scholar] [CrossRef]
- Byun, K.M.; Yoon, S.J.; Kim, D. Effect of surface roughness on the extinction-based localized surface plasmon resonance biosensors. Appl. Opt. 2008, 47, 5886–5892. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Wang, B.; Leong, E.S.; Yang, P.; Zong, Y.; Si, G.; Teng, J.; Maier, S.A. Enhanced surface plasmon resonance on a smooth silver film with a seed growth layer. ACS Nano 2010, 4, 3139–3146. [Google Scholar] [CrossRef]
- Schug, C.; Schempp, S.; Lamparter, P.; Steeb, S. Surface roughness of sputter-deposited gold films: A combined x-ray technique and AFM study. Surf. Interface Anal. 1999, 27, 670–677. [Google Scholar] [CrossRef]
- Zhang, J.; Irannejad, M.; Yavuz, M.; Cui, B. Gold nanohole array with sub-1 nm roughness by annealing for sensitivity enhancement of extraordinary optical transmission biosensor. Nanoscale Res. Lett. 2015, 10, 238. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Li, J.; Belianinov, A.; Ma, Z.; Renshaw, C.K.; Gelfand, R.M. Nanoaperture fabrication in ultra-smooth single-grain gold films with helium ion beam lithography. Nanotechnology 2020, 31, 465302. [Google Scholar] [CrossRef] [PubMed]
- Ng, D.K.; Bhola, B.S.; Bakker, R.M.; Ho, S.T. Ultrasmooth gold films via pulsed laser deposition. Adv. Funct. Mater. 2011, 21, 2587–2592. [Google Scholar] [CrossRef]
- Wieduwilt, T.; Kirsch, K.; Dellith, J.; Willsch, R.; Bartelt, H. Optical fiber micro-taper with circular symmetric gold coating for sensor applications based on surface plasmon resonance. Plasmonics 2013, 8, 545–554. [Google Scholar] [CrossRef]
- Diebel, J.; Löwe, H.; Samori, P.; Rabe, J. Fabrication of large-scale ultra-smooth metal surfaces by a replica technique. Appl. Phys. A 2001, 73, 273–279. [Google Scholar] [CrossRef]
- Miller, M.S.; Ferrato, M.-A.; Niec, A.; Biesinger, M.C.; Carmichael, T.B. Ultrasmooth gold surfaces prepared by chemical mechanical polishing for applications in nanoscience. Langmuir 2014, 30, 14171–14178. [Google Scholar] [CrossRef]
- Leandro, L.; Malureanu, R.; Rozlosnik, N.; Lavrinenko, A. Ultrathin, ultrasmooth gold layer on dielectrics without the use of additional metallic adhesion layers. ACS Appl. Mater. Interfaces 2015, 7, 5797–5802. [Google Scholar] [CrossRef] [Green Version]
- Gaylord, T.K.; Moharam, M. Analysis and applications of optical diffraction by gratings. Proc. IEEE 1985, 73, 894–937. [Google Scholar] [CrossRef]
- Moharam, M.; Grann, E.B.; Pommet, D.A.; Gaylord, T. Formulation for stable and efficient implementation of the rigorous coupled-wave analysis of binary gratings. J. Opt. Soc. Am. A 1995, 12, 1068–1076. [Google Scholar] [CrossRef]
- Thadson, K.; Visitsattapongse, S.; Pechprasarn, S. Deep learning-based single-shot phase retrieval algorithm for surface plasmon resonance microscope based refractive index sensing application. Sci. Rep. 2021, 11, 16289. [Google Scholar] [CrossRef] [PubMed]
- O’Donnell, K.; Mendez, E. Experimental study of scattering from characterized random surfaces. JOSA A 1987, 4, 1194–1205. [Google Scholar] [CrossRef] [Green Version]
- Johnson, P.B.; Christy, R.-W. Optical constants of the noble metals. Phys. Rev. B 1972, 6, 4370. [Google Scholar] [CrossRef]
- Davidson, A.M.; Brust, M.; Cooper, D.L.; Volk, M. Sensitive analysis of protein adsorption to colloidal gold by differential centrifugal sedimentation. Anal. Chem. 2017, 89, 6807–6814. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saleem, M.R.; Ali, R. Polymer Resonant Waveguide Gratings. In Emerging Waveguide Technology; IntechOpen: London, UK, 2018. [Google Scholar]
- Nuutinen, T.; Karvinen, P.; Rahomäki, J.; Vahimaa, P. Resonant waveguide grating (RWG): Overcoming the problem of angular sensitivity by conical, broad-band illumination for fluorescence measurements. Anal. Methods 2013, 5, 281–284. [Google Scholar] [CrossRef]
- Mayet, A.S.; Cansizoglu, H.; Gao, Y.; Ghandiparsi, S.; Kaya, A.; Bartolo-Perez, C.; AlHalaili, B.; Yamada, T.; Devine, E.P.; Elrefaie, A.F. Surface passivation of silicon photonic devices with high surface-to-volume-ratio nanostructures. JOSA B 2018, 35, 1059–1065. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, Y.; Mi, L.; Ma, J.; Wu, X.; Fei, Y. High performance of a metal layer-assisted guided-mode resonance biosensor modulated by double-grating. Biosensors 2021, 11, 221. [Google Scholar] [CrossRef] [PubMed]
- Berguiga, L.; Zhang, S.; Argoul, F.; Elezgaray, J. High-resolution surface-plasmon imaging in air and in water: V (z) curve and operating conditions. Opt. Lett. 2007, 32, 509–511. [Google Scholar] [CrossRef]
- Moharam, M.; Gaylord, T. Rigorous coupled-wave analysis of planar-grating diffraction. JOSA 1981, 71, 811–818. [Google Scholar] [CrossRef]
- Chu, Y.; Schonbrun, E.; Yang, T.; Crozier, K.B. Experimental observation of narrow surface plasmon resonances in gold nanoparticle arrays. Appl. Phys. Lett. 2008, 93, 181108. [Google Scholar] [CrossRef]
- Zhang, J.; Pitter, M.C.; Liu, S.; See, C.; Somekh, M.G. Surface-plasmon microscopy with a two-piece solid immersion lens: Bright and dark fields. Appl. Opt. 2006, 45, 7977–7986. [Google Scholar] [CrossRef]
- Thadson, K.; Sasivimolkul, S.; Suvarnaphaet, P.; Visitsattapongse, S.; Pechprasarn, S. Measurement precision enhancement of surface plasmon resonance based angular scanning detection using deep learning. Sci. Rep. 2022, 12, 2052. [Google Scholar] [CrossRef]
- Meng, Q.-Q.; Zhao, X.; Lin, C.-Y.; Chen, S.-J.; Ding, Y.-C.; Chen, Z.-Y. Figure of merit enhancement of a surface plasmon resonance sensor using a low-refractive-index porous silica film. Sensors 2017, 17, 1846. [Google Scholar] [CrossRef] [Green Version]
- Treebupachatsakul, T.; Boosamalee, A.; Chaithatwanitch, K.; Pechprasarn, S. Generalized figure of merit for plasmonic dip measurement-based surface plasmon resonance sensors. Biomed. Opt. Express 2022, 13, 1784–1800. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, C.; Gao, Y.; Wang, J.; Yang, W. Influence of surface roughness on surface plasmon resonance phenomenon of gold film. Chin. Opt. Lett. 2016, 14, 042401. [Google Scholar] [CrossRef] [Green Version]
- Zhao, M.; Wang, J.; Zhang, Y.; Ge, M.; Zhang, P.; Shen, J.; Li, C. Self-referenced refractive index sensor based on double-dips method with bimetal-dielectric and double-groove grating. Opt. Express 2022, 30, 8376–8390. [Google Scholar] [CrossRef]
- Agarwal, S.; Prajapati, Y.; Singh, V. Influence of metal roughness on SPR sensor performance. Opt. Commun. 2017, 383, 113–118. [Google Scholar] [CrossRef]
- Pechprasarn, S.; Chow, T.W.; Somekh, M.G. Application of confocal surface wave microscope to self-calibrated attenuation coefficient measurement by Goos-Hänchen phase shift modulation. Sci. Rep. 2018, 8, 8547. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wy, Y.; Jung, H.; Hong, J.W.; Han, S.W. Exploiting plasmonic hot spots in Au-based nanostructures for sensing and photocatalysis. Acc. Chem. Res. 2022, 55, 831–843. [Google Scholar] [CrossRef]
- Sasivimolkul, S.; Pechprasarn, S.; Somekh, M.G. Analysis of open grating-based Fabry–Pérot resonance structures with potential applications for ultrasensitive refractive index sensing. IEEE Sens. J. 2021, 21, 10628–10636. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Treatment Techniques | RMS Roughness |
|---|---|
| Sputter Coating (No Treatment) [31] | 1.4–2.5 nm |
| Thermal Annealing [32] | <1 nm |
| Chemically Grown Single-Crystalline Gold [35] | <1 nm |
| Chemical Polishing [37,38] | 0.38 ± 0.05 nm |
| Helium Ion Beam [33] | 0.267 nm |
| Mica Substrate Utilizing [36] | 0.2 nm |
| Laser Ablation [34] | 0.17 nm |
| Thermal Annealing Temoerature in °C | RMS of Roughness (nm) | Roughness Height (nm) | Experimental θsp (Degrees) | Simulated θsp Using the Proposed Method (Degrees) |
|---|---|---|---|---|
| 100 °C | 1.260 | 6.1 | 44.04 | 44.04 |
| 200 °C | 0.906 | 3.7 | 43.94 | 43.93 |
| 300 °C | 0.700 | 2.9 | 43.75 | 43.70 |
| 400 °C | 0.415 | 1.5 | 43.65 | 43.56 |
| Quantitative Performance Parameters | Ideal Uniform Surface | h = 3 nm, cl = 10 nm (Operating Point ‘a’) | h = 10 nm, cl = 30 nm (Operating Point ‘b’) | h = 12 nm, cl = 20 nm (Operating Point ‘c’) | h = 9 nm, cl = 8 nm (Operating Point ‘d’) | h = 16 nm, cl = 15 nm (Operating Point ‘e’) | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| No Sidewall BSA | Sidewall BSA | No Sidewall BSA | Sidewall BSA | No Sidewall BSA | Sidewall BSA | No Sidewall BSA | Sidewall BSA | No Sidewall BSA | Sidewall BSA | ||
| S (rad/µm2) | 122.59 | −379.88 | −379.88 | 85.31 | 85.31 | 996.11 | 1280.00 | 1191.13 | 1608.02 | - | - |
| n0sinθsp (unitless) | 1.440 | 1.481 | 1.481 | 1.506 | 1.506 | 1.495 | 1.496 | 1.486 | 1.490 | 1.466 * | 1.473 * |
| FWHM (rad∙RIU /µm) | 0.41 | 0.58 | 0.58 | 0.79 | 0.79 | 0.66 | 0.65 | 0.67 | 0.67 | 0.77 | 0.75 |
| ΔI (unitless) | 0.90 | 0.88 | 0.88 | 0.47 | 0.47 | 0.13 | 0.15 | 0.10 | 0.14 | 0.001 | 0.003 |
| Isp (unitless) | 0.007 | 0.018 | 0.018 | 0.41 | 0.41 | 0.72 | 0.70 | 0.69 | 0.60 | 0.75 | 0.69 |
| FoM1 (unitless) | 299.00 | −654.97 | −654.97 | 107.98 | 107.98 | 1509.26 | 1969.23 | 1777.80 | 2400.02 | - | - |
| FoM2 (unitless) | 980.66 | −1677.42 | −1677.42 | 92.52 | 92.52 | 590.75 | 833.81 | 616.84 | 1020.33 | - | - |
| h = 3 nm, cl = 10 nm (Operating Point ‘a’) | h = 10 nm, cl = 30 nm (Operating Point ‘b’) | h = 12 nm, cl = 20 nm (Operating Point ‘c’) | h = 9 nm, cl = 8 nm (Operating Point ‘d’) | |
|---|---|---|---|---|
| ERS,roughness | −3.10 | 0.70 | 10.44 | 13.12 |
| ERS,LSPR | −3.10 (100%) | 0.70 (100%) | 8.13 (77.87%) | 9.72 (74.07%) |
| ERS,protein | 0 (0%) | 0 (0%) | 2.31 (22.13%) | 3.40 (25.93%) |
| ERFoM1,roughness | −2.19 | 0.36 | 6.59 | 8.03 |
| ERFoM1,LSPR | −2.19 (100%) | 0.36 (100%) | 5.05 (76.64%) | 5.95 (74.07%) |
| ERFoM1,protein | 0 (0%) | 0 (0%) | 1.54 (23.36%) | 2.08 (25.93%) |
| ERFoM2,roughness | −1.71 | 0.09 | 0.85 | 1.04 |
| ERFoM2,LSPR | −1.71 (100%) | 0.09 (100%) | 0.60 (70.85%) | 0.63 (60.45%) |
| ERFoM2,protein | 0 (0%) | 0 (0%) | 0.25 (29.15%) | 0.41 (39.55%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Treebupachatsakul, T.; Shinnakerdchoke, S.; Pechprasarn, S. Sensing Mechanisms of Rough Plasmonic Surfaces for Protein Binding of Surface Plasmon Resonance Detection. Sensors 2023, 23, 3377. https://doi.org/10.3390/s23073377
Treebupachatsakul T, Shinnakerdchoke S, Pechprasarn S. Sensing Mechanisms of Rough Plasmonic Surfaces for Protein Binding of Surface Plasmon Resonance Detection. Sensors. 2023; 23(7):3377. https://doi.org/10.3390/s23073377
Chicago/Turabian StyleTreebupachatsakul, Treesukon, Siratchakrit Shinnakerdchoke, and Suejit Pechprasarn. 2023. "Sensing Mechanisms of Rough Plasmonic Surfaces for Protein Binding of Surface Plasmon Resonance Detection" Sensors 23, no. 7: 3377. https://doi.org/10.3390/s23073377