
The Application of Wireless Underground Sensor Networks to Monitor Seepage inside an Earth Dam



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. Proposal
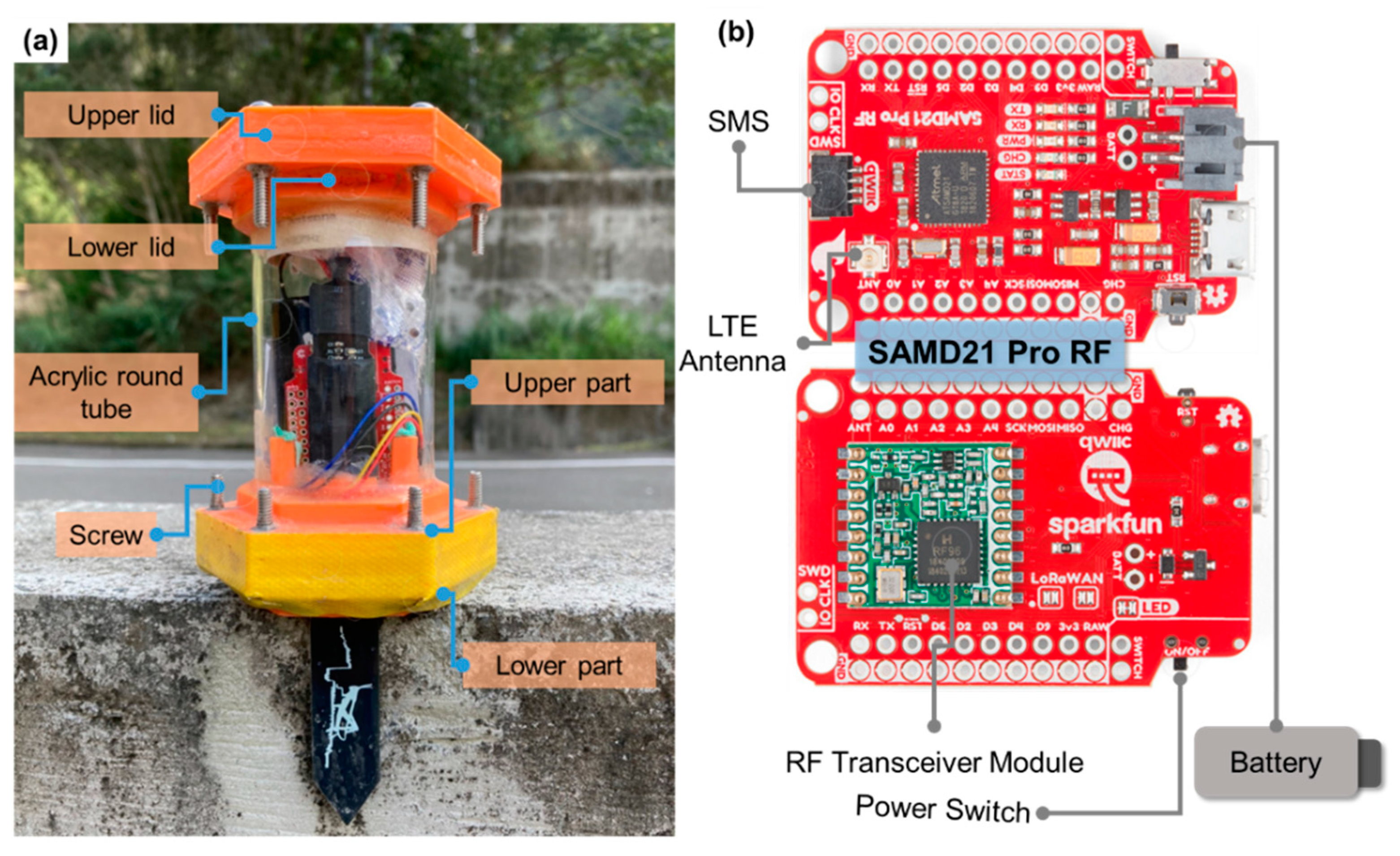
3.1. Sensor External and Internal Design
3.2. SAMD21 Pro RF (SAMD21)-Based Sensor
3.3. Power Management Testing
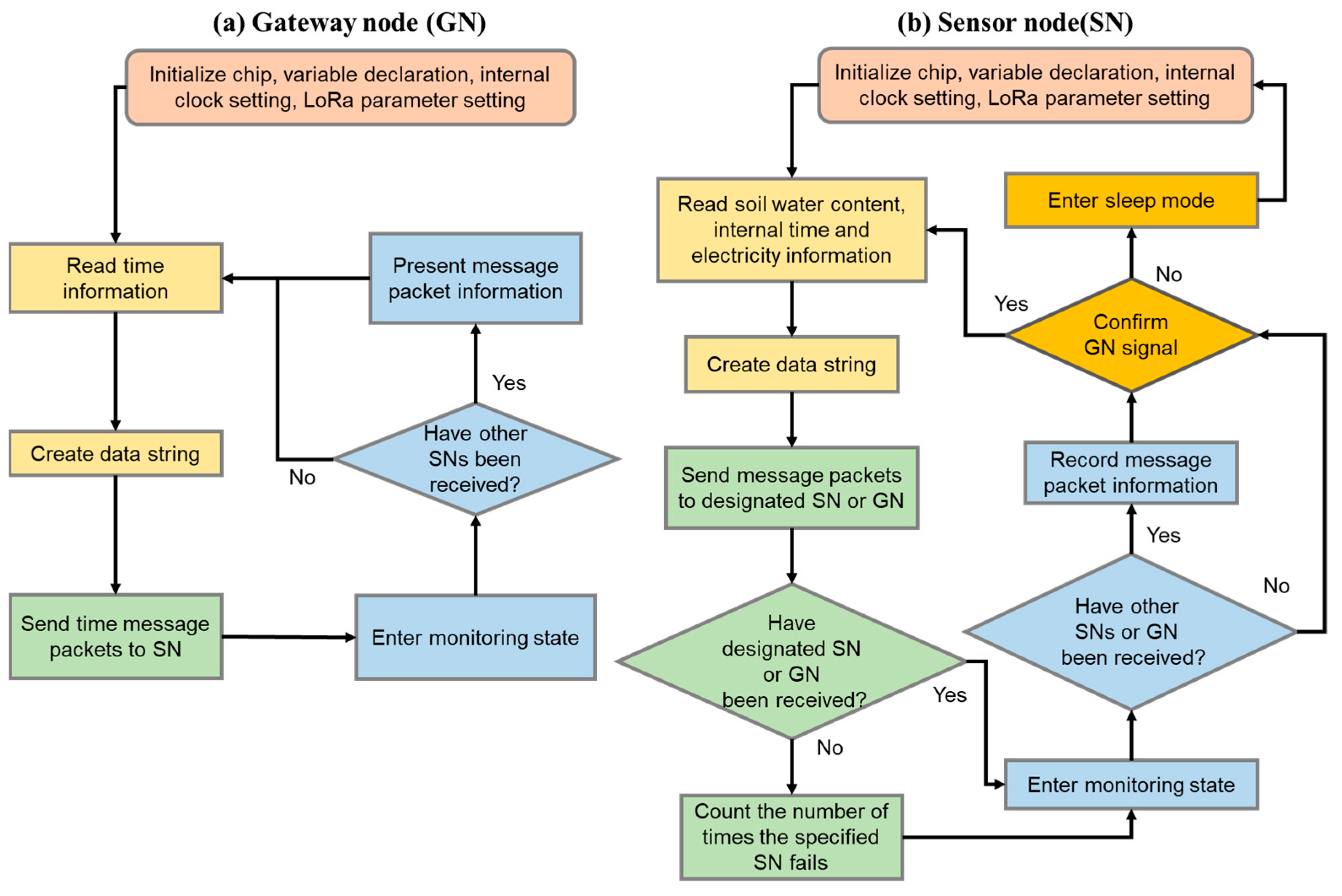
3.4. Programming Plan for Wireless Underground Transmission Sensors
3.5. Effectiveness Evaluation of Transmission Testing
3.6. Soil Weight Water Content Law Test
4. Testing of Wireless Underground Transmission Sensors
4.1. Peer-to-Peer Transmission Test
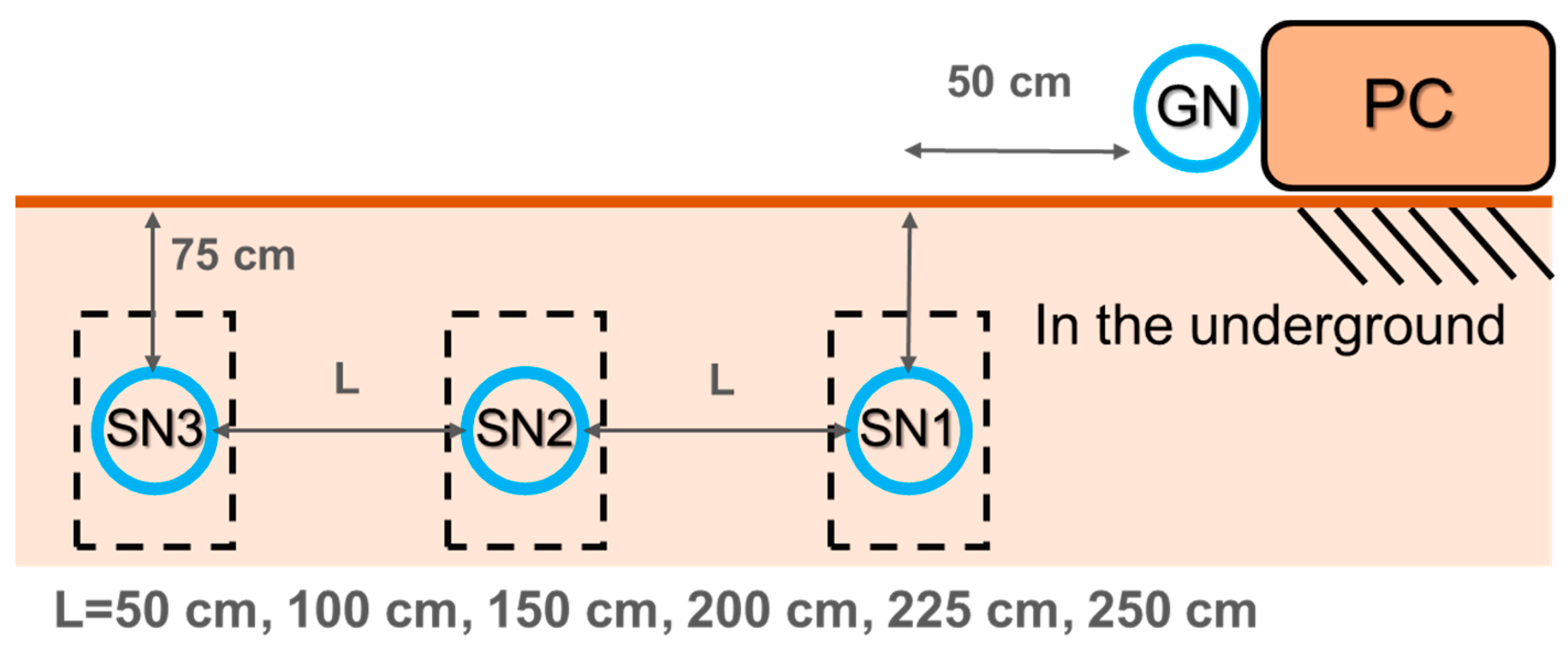
4.2. Multi-Hop Underground Transmission Test
4.3. Power Management Test
4.4. Soil Moisture Calibration Test
5. Seepage Test of Earth Dam
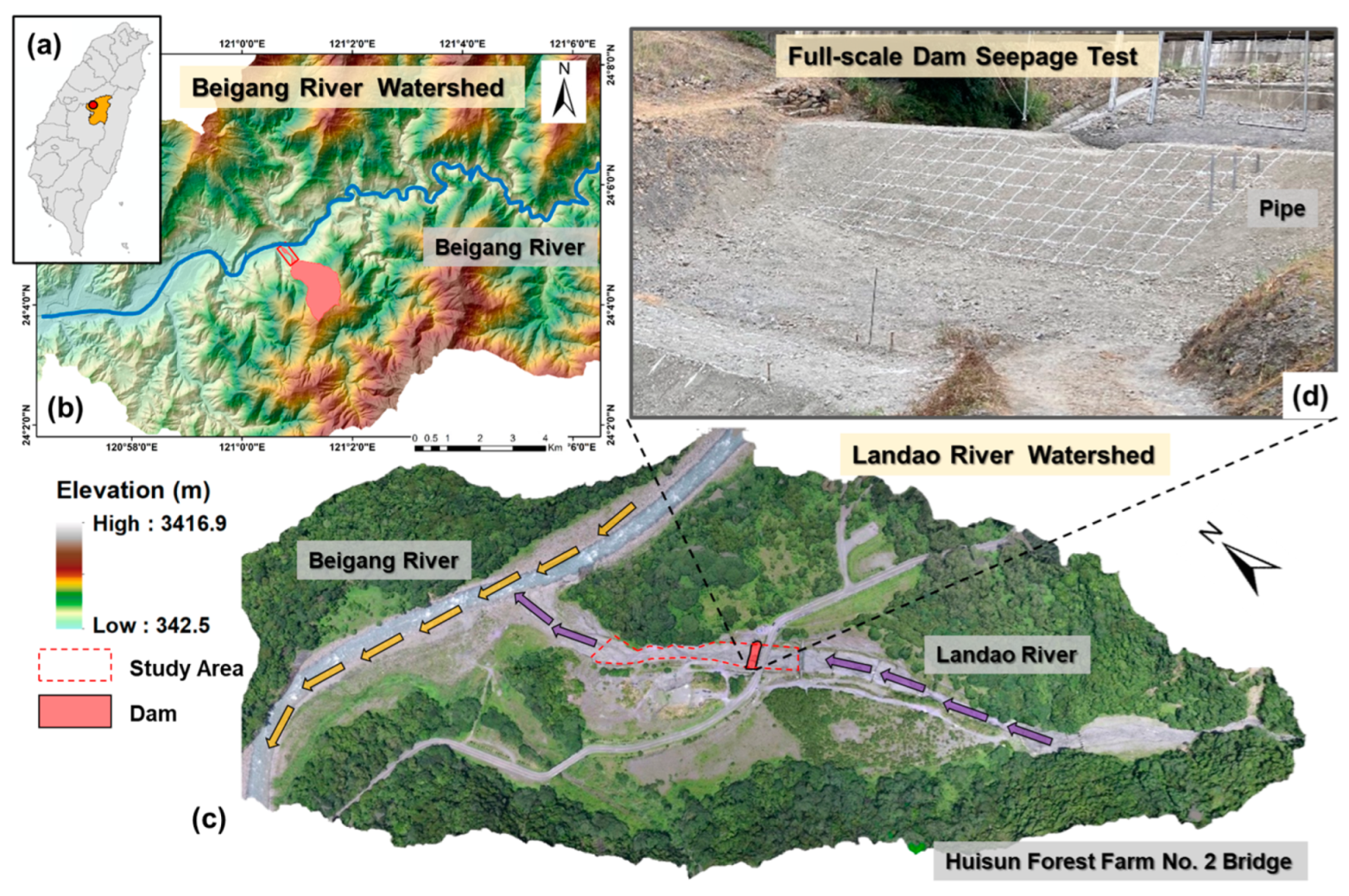
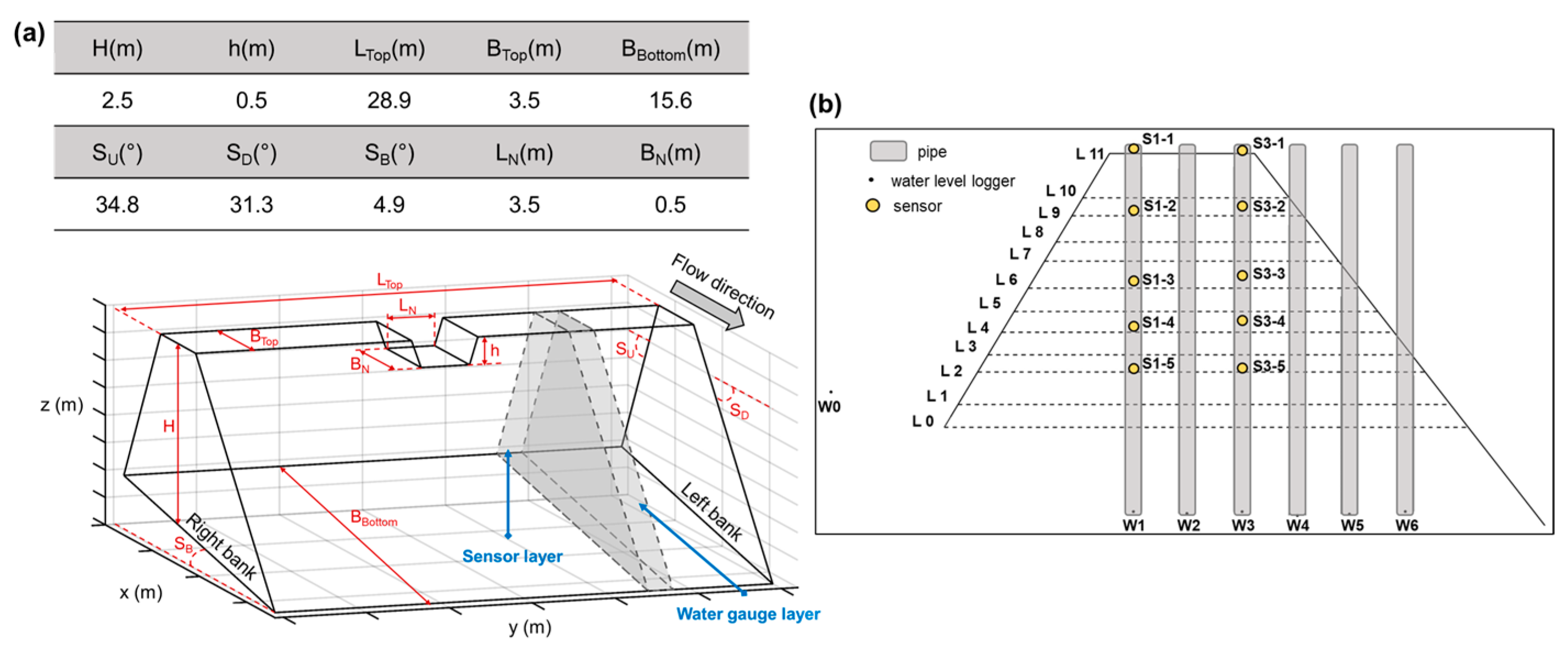
5.1. Configuration of Seepage Test
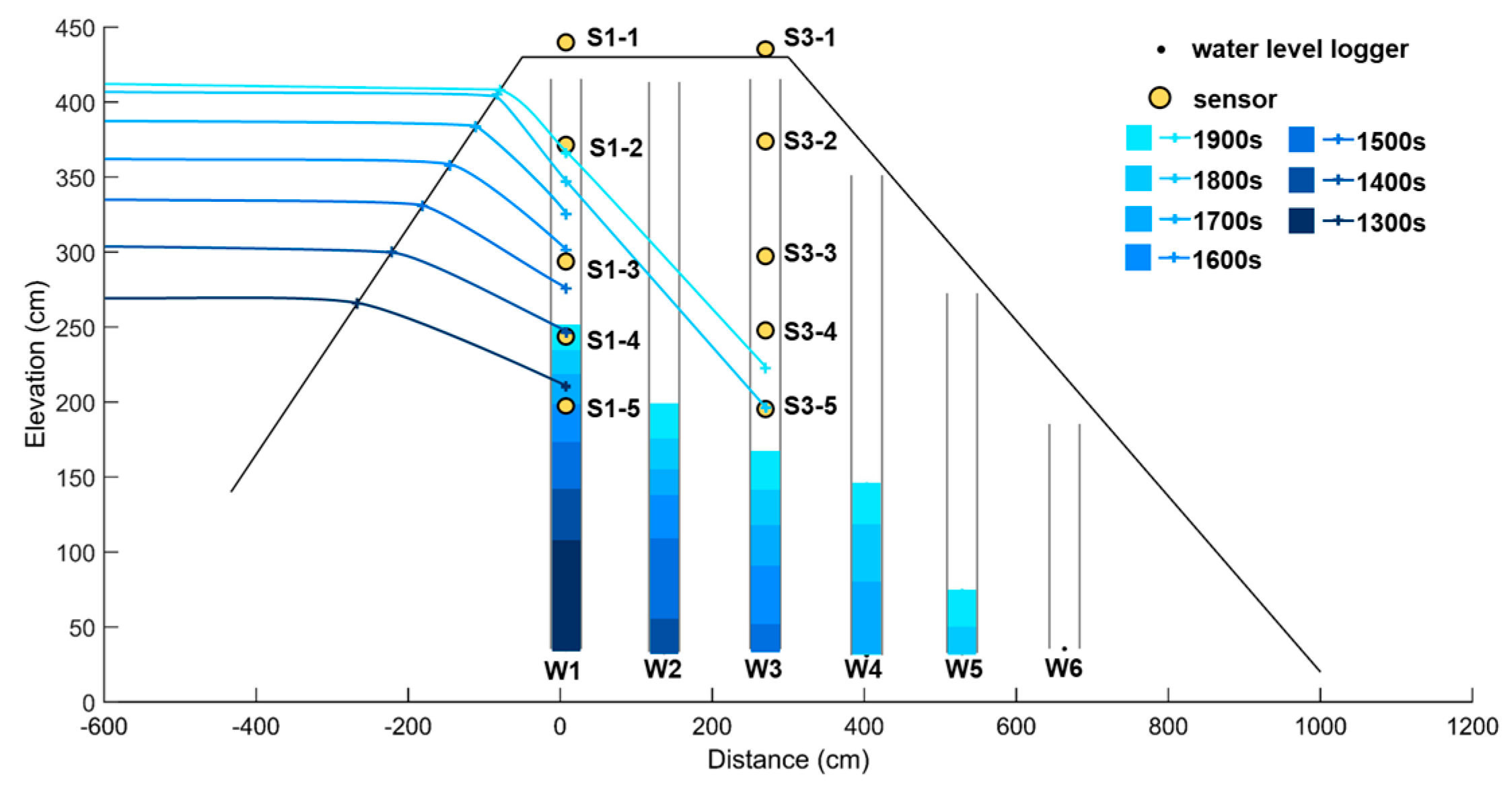
5.2. Analysis of Internal Water Content of Dam
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, B.; Chen, Y.; Wu, C.; Peng, Y.; Song, J.; Liu, W.; Liu, X. Empirical and semi-analytical models for predicting peak outflows caused by embankment dam failures. J. Hydrol. 2018, 562, 692–702. [Google Scholar] [CrossRef]
- Zhang, L.M.; Xu, Y.; Jia, J.S. Analysis of earth dam failures: A database approach. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2009, 3, 184–189. [Google Scholar] [CrossRef] [Green Version]
- Nthaba, B.; Shemang, E.M.; Atekwana, E.A.; Selepeng, A.T. Investigating the earth fill embankment of the lotsane dam for internal defects using time-lapse resistivity imaging and frequency domain electromagnetics. J. Environ. Eng. Geophys. 2020, 25, 325–339. [Google Scholar] [CrossRef]
- Panthulu, T.; Krishnaiah, C.; Shirke, J. Detection of seepage paths in earth dams using self-potential and electrical resistivity methods. Eng. Geol. 2001, 59, 281–295. [Google Scholar] [CrossRef]
- Busato, L.; Boaga, J.; Peruzzo, L.; Himi, M.; Cola, S.; Bersan, S.; Cassiani, G. Combined geophysical surveys for the characterization of a reconstructed river embankment. Eng. Geol. 2016, 211, 74–84. [Google Scholar] [CrossRef]
- Martínez-Moreno, F.J.; Delgado-Ramos, F.; Galindo-Zaldívar, J.; Martín-Rosales, W.; López-Chicano, M.; González-Castillo, L. Identification of leakage and potential areas for internal erosion combining ert and ip techniques at the negratín dam left abutment (granada, southern spain). Eng. Geol. 2018, 240, 74–80. [Google Scholar] [CrossRef]
- Guo, Y.; Cui, Y.-A.; Xie, J.; Luo, Y.; Zhang, P.; Liu, H.; Liu, J. Seepage detection in earth-filled dam from self-potential and electrical resistivity tomography. Eng. Geol. 2022, 306, 106750. [Google Scholar] [CrossRef]
- Lum, K.; Sheffer, M. Dam safety: Review of geophysical methods to detect seepage and internal erosion in embankment dams. Hydro-Review 2005, 29. [Google Scholar]
- Pánek, T.; Hradecký, J.; Minár, J.; Hungr, O.; Dušek, R. Late holocene catastrophic slope collapse affected by deep-seated gravitational deformation in flysch: Ropice mountain, czech republic. Geomorphology 2009, 103, 414–429. [Google Scholar] [CrossRef]
- Grandjean, G.; Gourry, J.-C.; Sanchez, O.; Bitri, A.; Garambois, S. Structural study of the ballandaz landslide (french alps) using geophysical imagery. J. Appl. Geophys. 2011, 75, 531–542. [Google Scholar] [CrossRef]
- Lin, C.-P.; Hung, Y.-C.; Yu, Z.-H.; Wu, P.-L. Investigation of abnormal seepages in an earth dam using resistivity tomography. J. GeoEng. 2013, 8, 61–70. [Google Scholar]
- Lai, S.-L.; Lee, D.-H.; Wu, J.-H.; Dong, Y.-M. Detecting the cracks and seepage line associated with an earthquake in an earth dam using the nondestructive testing technologies. J. Chin. Inst. Eng. 2014, 37, 428–437. [Google Scholar] [CrossRef]
- Planès, T.; Mooney, M.; Rittgers, J.; Parekh, M.; Behm, M.; Snieder, R. Time-lapse monitoring of internal erosion in earthen dams and levees using ambient seismic noise. Géotechnique 2016, 66, 301–312. [Google Scholar] [CrossRef] [Green Version]
- Moffat, R.; Fannin, R.J.; Garner, S.J. Spatial and temporal progression of internal erosion in cohesionless soil. Can. Geotech. J. 2011, 48, 399–412. [Google Scholar] [CrossRef] [Green Version]
- Yunita, F.; Puspitosari, D. Risk management in dam break disaster: Lessons learned from way ela natural dam break. J. Sos. Ekon. Pekerj. Umum 2015. [Google Scholar]
- Chen, C.-Y.; Chen, S.-C.; Chen, K.-H.; Liu, Z.-H. Thermal monitoring and analysis of the large-scale field earth-dam breach process. Environ. Monit. Assess. 2018, 190, 483. [Google Scholar] [CrossRef]
- Zhou, R.; Su, H.; Wen, Z. Experimental study on leakage detection of grassed earth dam by passive infrared thermography. NDT E Int. 2022, 126, 102583. [Google Scholar] [CrossRef]
- Bersan, S.; Koelewijn, A.R.; Simonini, P. Effectiveness of distributed temperature measurements for early detection of piping in river embankments. Hydrol. Earth Syst. Sci. 2018, 22, 1491–1508. [Google Scholar] [CrossRef] [Green Version]
- Song, C.R.; Yosef, T.Y. Seepage monitoring of an embankment dam based on hydro-thermal coupled analysis. J. Eng. Mater. Technol. 2017, 139, 021024. [Google Scholar] [CrossRef]
- Abrardo, A.; Pozzebon, A. A multi-hop lora linear sensor network for the monitoring of underground environments: The case of the medieval aqueducts in Siena, Italy. Sensors 2019, 19, 402. [Google Scholar] [CrossRef] [Green Version]
- Akyildiz, I.F.; Stuntebeck, E.P. Wireless underground sensor networks: Research challenges. Ad Hoc Netw. 2006, 4, 669–686. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef] [Green Version]
- Liang, R.; Zhao, L.; Wang, P. Performance evaluations of lora wireless communication in building environments. Sensors 2020, 20, 3828. [Google Scholar] [CrossRef]
- Chaterji, S.; DeLay, N.; Evans, J.; Mosier, N.; Engel, B.; Buckmaster, D.; Chandra, R. Artificial intelligence for digital agriculture at scale: Techniques, policies, and challenges. arXiv 2020, arXiv:2001.09786. [Google Scholar]
- Ojha, T.; Misra, S.; Raghuwanshi, N.S. Wireless sensor networks for agriculture: The state-of-the-art in practice and future challenges. Comput. Electron. Agric. 2015, 118, 66–84. [Google Scholar] [CrossRef]
- García, L.; Parra, L.; Jimenez, J.M.; Parra, M.; Lloret, J.; Mauri, P.V.; Lorenz, P. Deployment strategies of soil monitoring wsn for precision agriculture irrigation scheduling in rural areas. Sensors 2021, 21, 1693. [Google Scholar] [CrossRef]
- Adu-Manu, K.S.; Tapparello, C.; Heinzelman, W.; Katsriku, F.A.; Abdulai, J.-D. Water quality monitoring using wireless sensor networks: Current trends and future research directions. ACM Trans. Sens. Netw. (TOSN) 2017, 13, 1–41. [Google Scholar] [CrossRef] [Green Version]
- Saravanan, M.; Das, A.; Iyer, V. Smart water grid management using LPWAN IoT technology. In Proceedings of the 2017 Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Alemdar, H.; Ersoy, C. Wireless sensor networks for healthcare: A survey. Comput. Netw. 2010, 54, 2688–2710. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, H.; Yi, E.A.; Raghunathan, N.; Mousoulis, C.; Chaterji, S.; Peroulis, D.; Shakouri, A.; Bagchi, S. Hybrid low-power wide-area mesh network for iot applications. IEEE Internet Things J. 2020, 8, 901–915. [Google Scholar] [CrossRef]
- Li, M.; Liu, Y. Underground coal mine monitoring with wireless sensor networks. ACM Trans. Sen. Netw. 2009, 5, 10. [Google Scholar] [CrossRef] [Green Version]
- Sambo, D.W.; Forster, A.; Yenke, B.O.; Sarr, I.; Gueye, B.; Dayang, P. Wireless underground sensor networks path loss model for precision agriculture (wusn-plm). IEEE Sens. J. 2020, 20, 5298–5313. [Google Scholar] [CrossRef]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- Zaman, I.; Gellhaar, M.; Dede, J.; Koehler, H.; Foerster, A. Design and evaluation of molenet for wireless underground sensor networks. In Proceedings of the 2016 IEEE 41st Conference on Local Computer Networks Workshops (LCN Workshops), Dubai, United Arab Emirates, 6–10 November 2016; pp. 145–147. [Google Scholar]
- Hardie, M.; Hoyle, D. Underground wireless data transmission using 433-mhz lora for agriculture. Sensors 2019, 19, 4232. [Google Scholar] [CrossRef] [Green Version]
- Ray, P.P. A survey on internet of things architectures. J. King Saud Univ. Comput. Inf. Sci. 2018, 30, 291–319. [Google Scholar]
- Moridi, M.A.; Kawamura, Y.; Sharifzadeh, M.; Chanda, E.K.; Jang, H. An investigation of underground monitoring and communication system based on radio waves attenuation using zigbee. Tunn. Undergr. Space Technol. 2014, 43, 362–369. [Google Scholar] [CrossRef]
- Zhang, X.; Andreyev, A.; Zumpf, C.; Negri, M.C.; Guha, S.; Ghosh, M. Thoreau: A subterranean wireless sensing network for agriculture and the environment. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; pp. 78–84. [Google Scholar]
- Njuu, K. Wireless sensor network (wsn) for water monitoring: A review on building blocks and factors to consider during design decisions. Int. J. Comput. Appl. 2019, 177, 12–17. [Google Scholar] [CrossRef]
- Kevin, I.; Wang, K.; Wu, S.; Ivoghlian, A.; Salcic, Z.; Austin, A.; Zhou, X. LWS: A lorawan wireless underground sensor network simulator for agriculture applications. In Proceedings of the 2019 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Leicester, UK, 19–23 August 2019; pp. 475–482. [Google Scholar]
- Goursaud, C.; Gorce, J.M. Dedicated Networks for IoT: Phy/Mac State of the Art and Challenges; EAI Endorsed Transactions on the Internet of Things: Villeurbanne, France, 2015. [Google Scholar]
- Wan, X.-F.; Yang, Y.; Cui, J.; Sardar, M.S. Lora propagation testing in soil for wireless underground sensor networks. In Proceedings of the 2017 Sixth Asia-Pacific Conference on Antennas and Propagation (APCAP), Xi’an, China, 16–19 October 2017; pp. 1–3. [Google Scholar]
- Ebi, C.; Schaltegger, F.; Rüst, A.; Blumensaat, F. Synchronous lora mesh network to monitor processes in underground infrastructure. IEEE Access 2019, 7, 57663–57677. [Google Scholar] [CrossRef]
- Baccour, N.; Koubâa, A.; Mottola, L.; Zúñiga, M.A.; Youssef, H.; Boano, C.A.; Alves, M. Radio link quality estimation in wireless sensor networks: A survey. ACM Trans. Sens. Netw. 2012, 8, 34. [Google Scholar] [CrossRef]
- Haghi, M.; Thurow, K.; Stoll, R. Wearable devices in medical internet of things: Scientific research and commercially available devices. Healthc. Inform. Res. 2017, 23, 4–15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Parri, L.; Parrino, S.; Peruzzi, G.; Pozzebon, A. Low power wide area networks (LPWAN) at sea: Performance analysis of offshore data transmission by means of lorawan connectivity for marine monitoring applications. Sensors 2019, 19, 3239. [Google Scholar] [CrossRef] [Green Version]
- Jovalekic, N.; Drndarevic, V.; Pietrosemoli, E.; Darby, I.; Zennaro, M. Experimental study of lora transmission over seawater. Sensors 2018, 18, 2853. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Petäjäjärvi, J.; Mikhaylov, K.; Hämäläinen, M.; Iinatti, J. Evaluation of lora lpwan technology for remote health and wellbeing monitoring evaluation of lora lpwan technology for remote health and wellbeing monitoring. In Proceedings of the 2016 10th International Symposium on Medical Information and Communication Technology (ISMICT), Worcester, MA, USA, 20–23 March 2016; pp. 1–5. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, M.-C.; Chen, H.-E.; Tfwala, S.S.; Lin, Y.-F.; Chen, S.-C. The Application of Wireless Underground Sensor Networks to Monitor Seepage inside an Earth Dam. Sensors 2023, 23, 3795. https://doi.org/10.3390/s23083795
Liang M-C, Chen H-E, Tfwala SS, Lin Y-F, Chen S-C. The Application of Wireless Underground Sensor Networks to Monitor Seepage inside an Earth Dam. Sensors. 2023; 23(8):3795. https://doi.org/10.3390/s23083795
Chicago/Turabian StyleLiang, Min-Chih, Hung-En Chen, Samkele S. Tfwala, Yu-Feng Lin, and Su-Chin Chen. 2023. "The Application of Wireless Underground Sensor Networks to Monitor Seepage inside an Earth Dam" Sensors 23, no. 8: 3795. https://doi.org/10.3390/s23083795
APA StyleLiang, M.-C., Chen, H.-E., Tfwala, S. S., Lin, Y.-F., & Chen, S.-C. (2023). The Application of Wireless Underground Sensor Networks to Monitor Seepage inside an Earth Dam. Sensors, 23(8), 3795. https://doi.org/10.3390/s23083795