
Flexible Magnetic Sensors

 , , , and
, , , and 
Abstract
:1. Introduction
2. Flexible Magnetic Sensor Devices
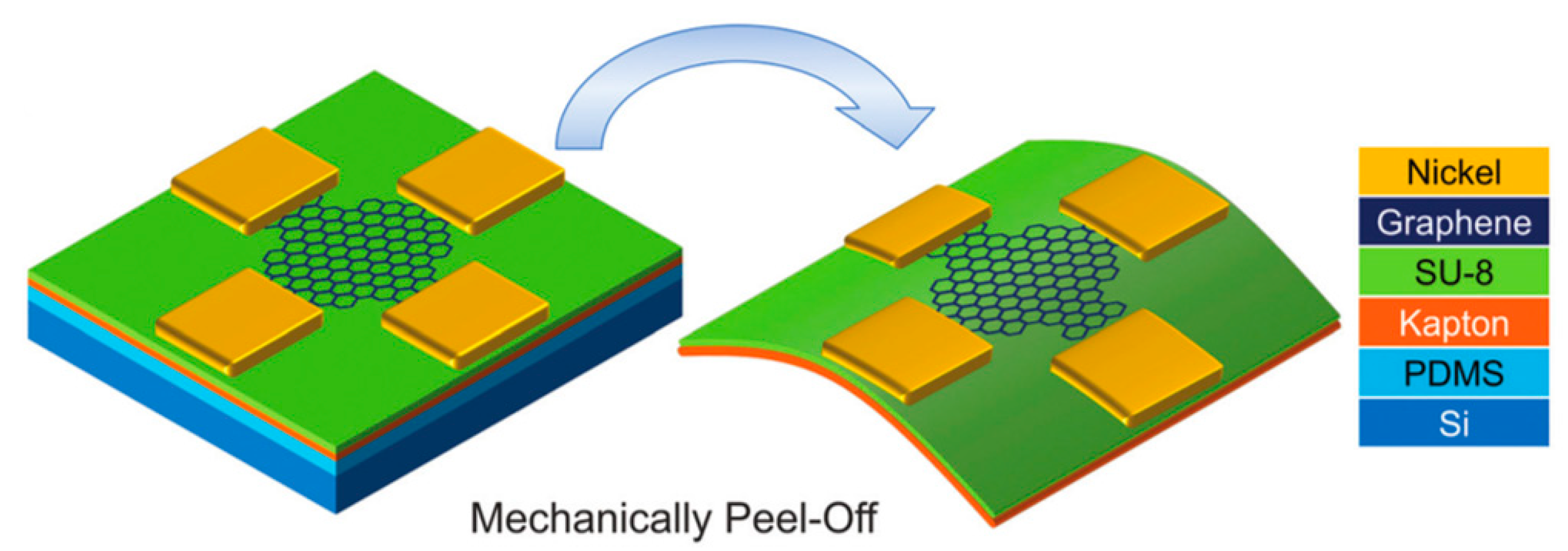
2.1. Flexible Hall Sensor
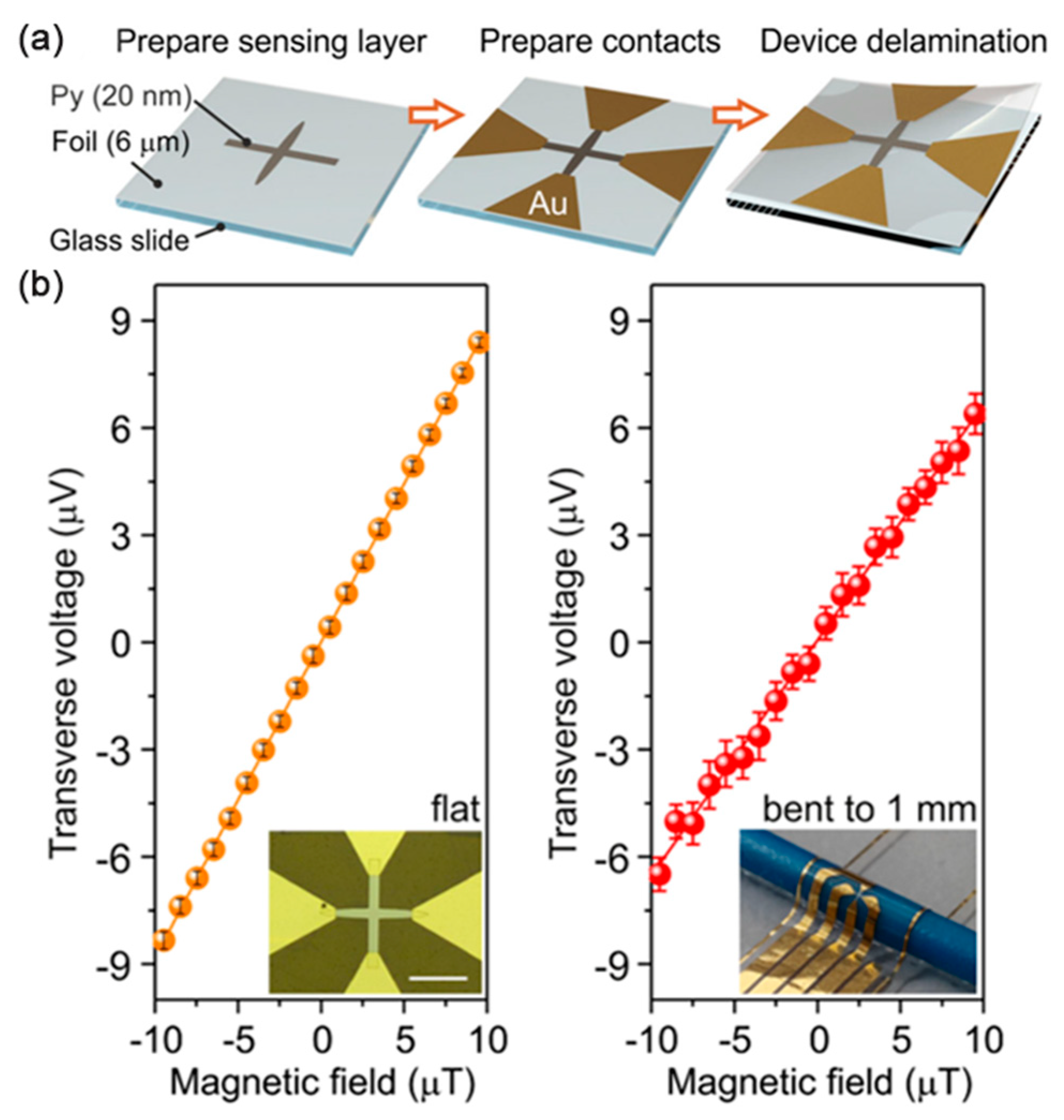
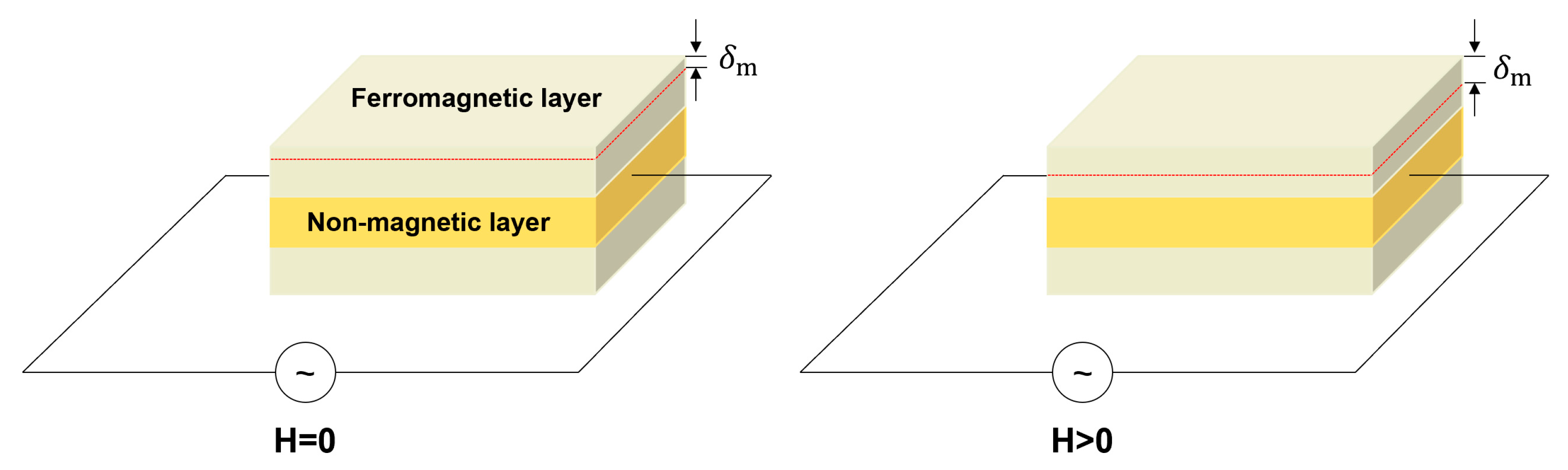
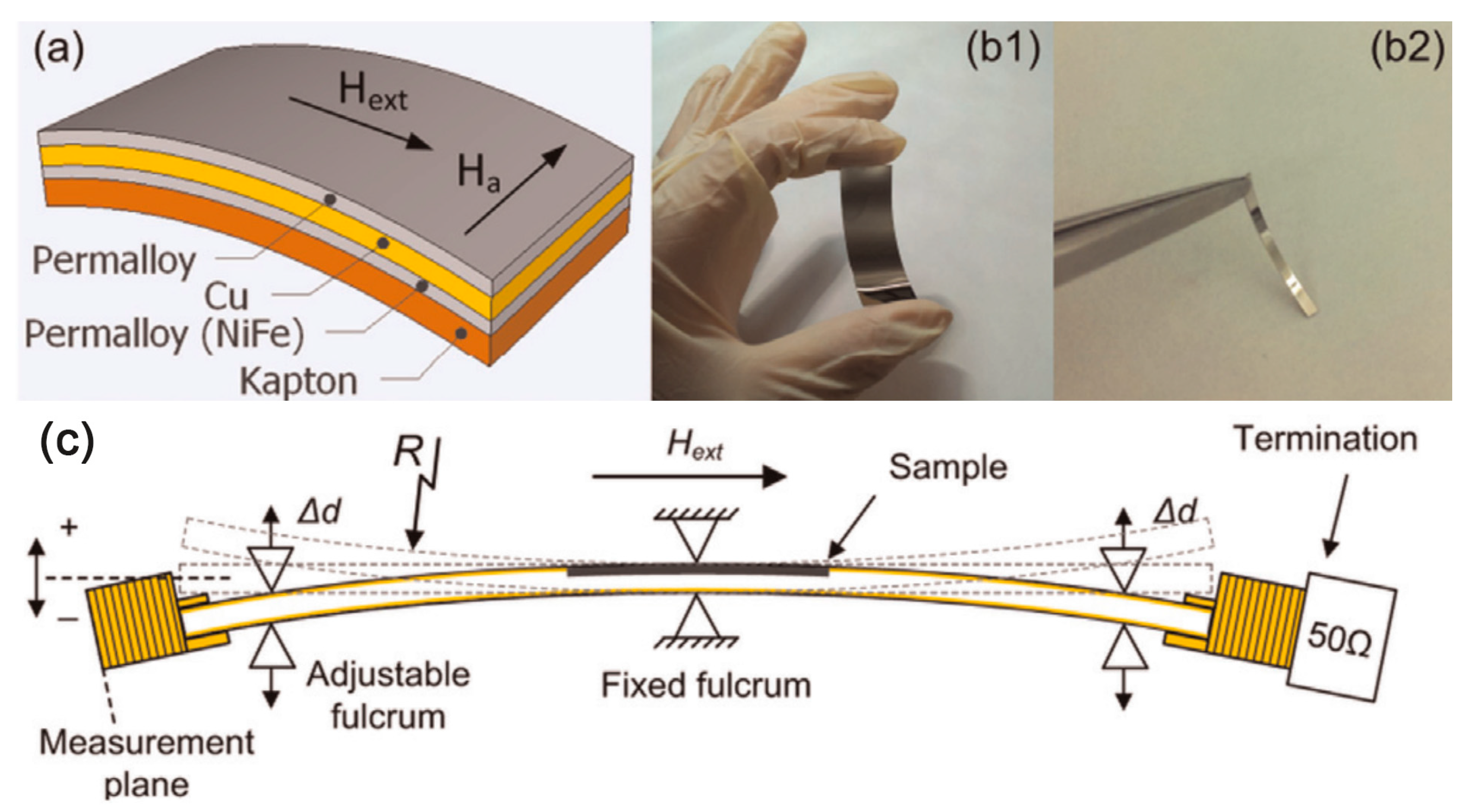
2.2. Flexible AMR Sensor
2.3. Flexible GMR Sensor
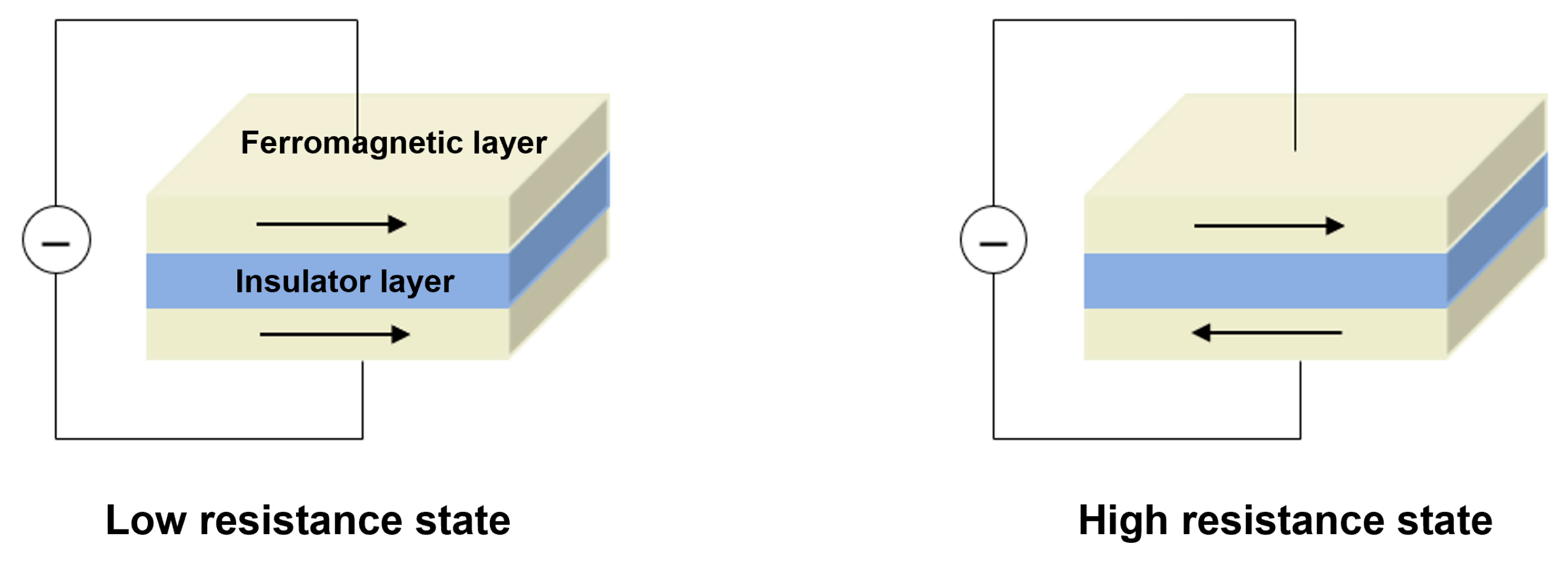
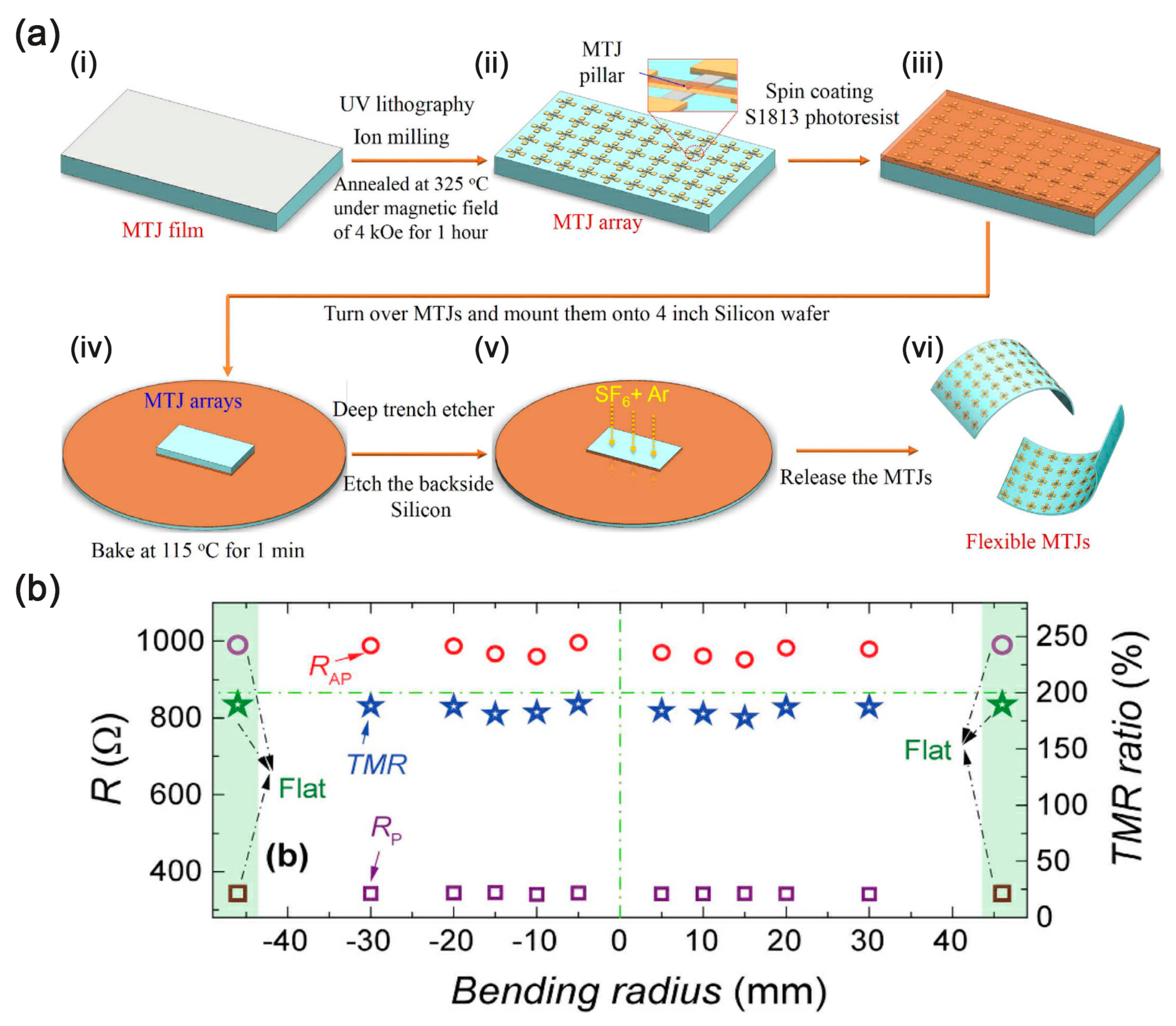
2.4. Flexible TMR Sensor
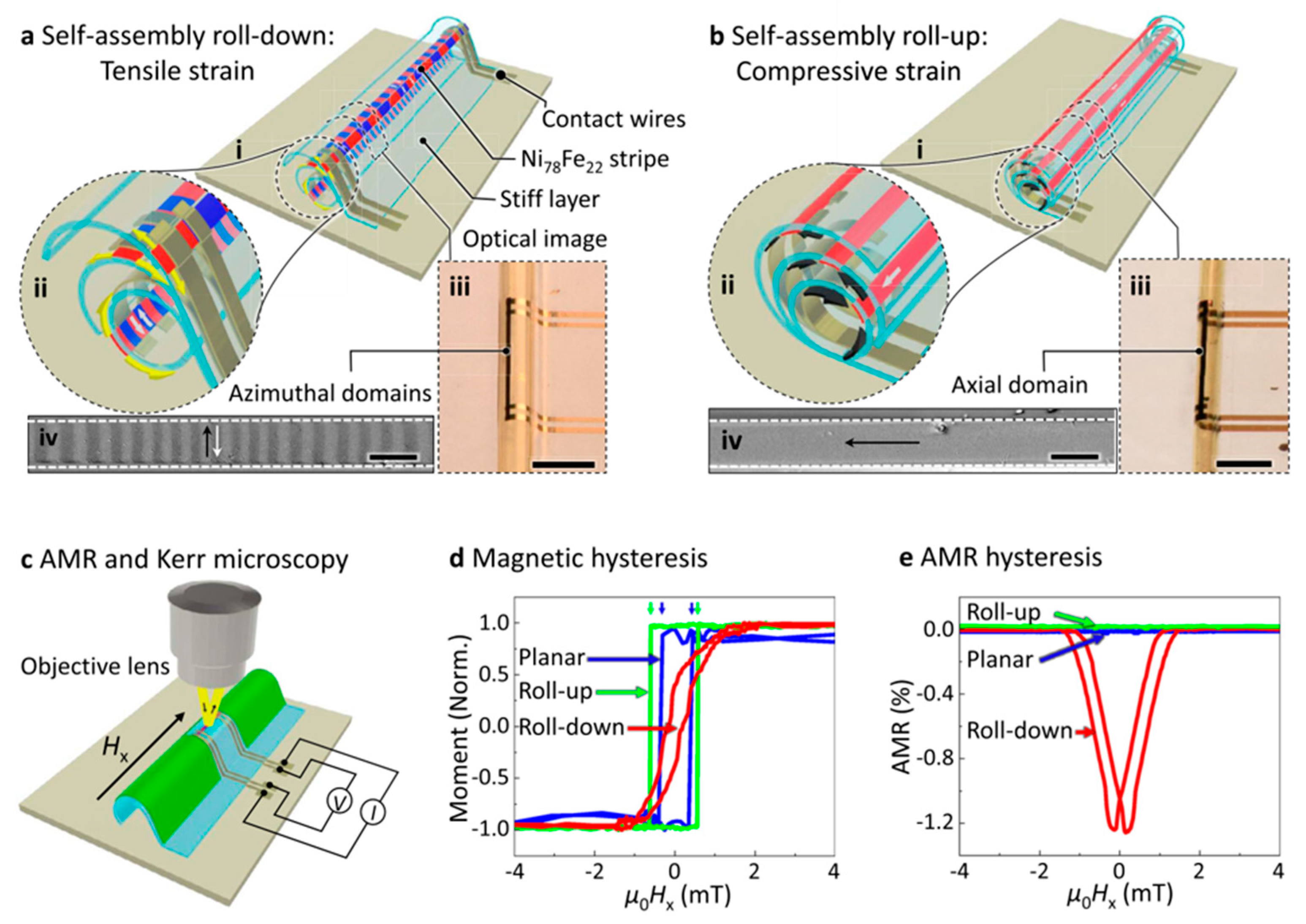
2.5. Flexible MI Sensor
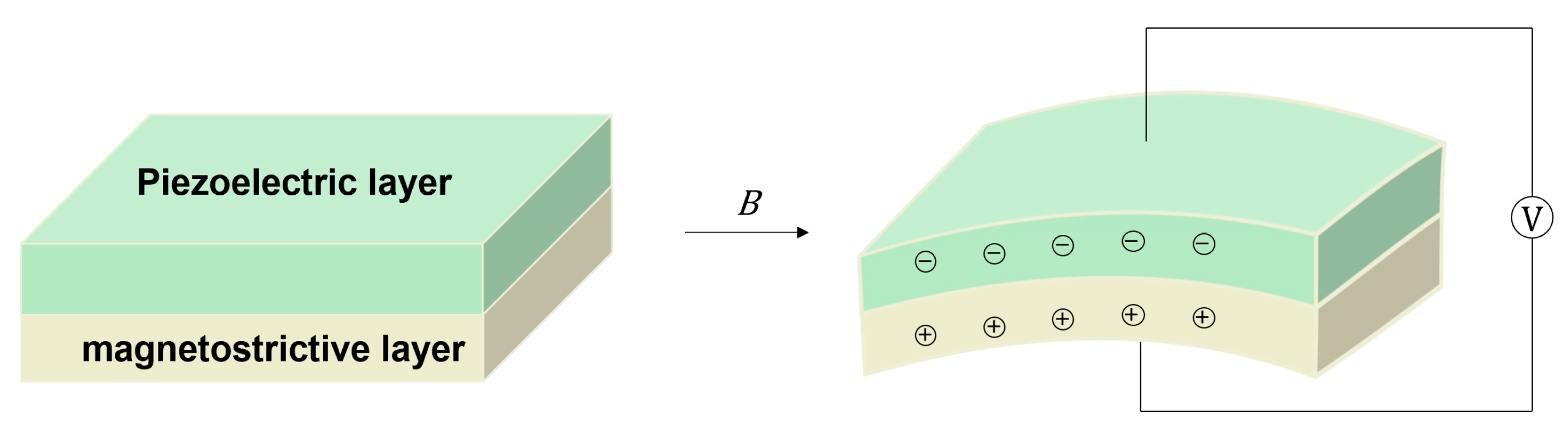
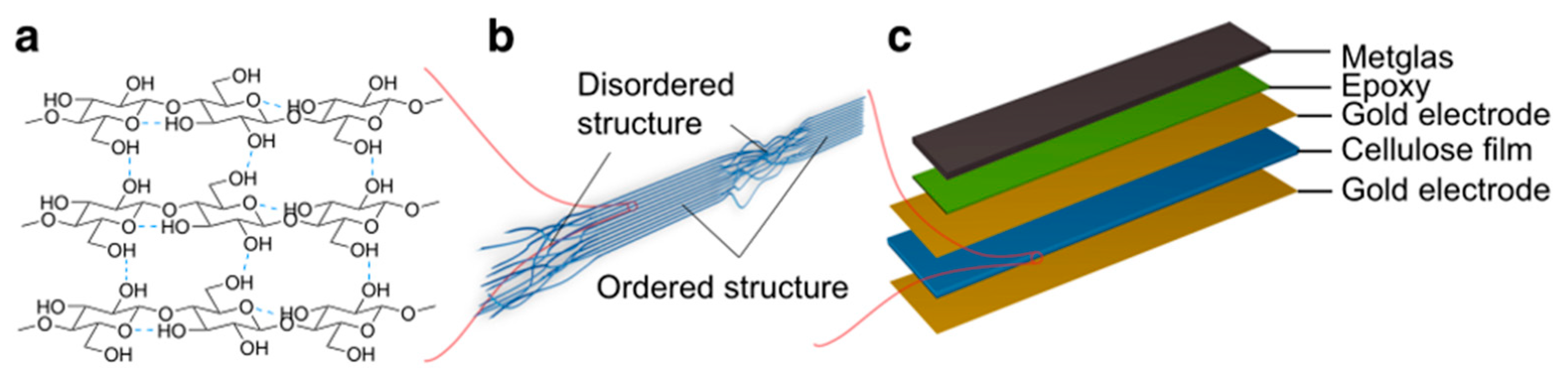
2.6. Flexible ME Sensor
3. Applications of Flexible Magnetic Sensors
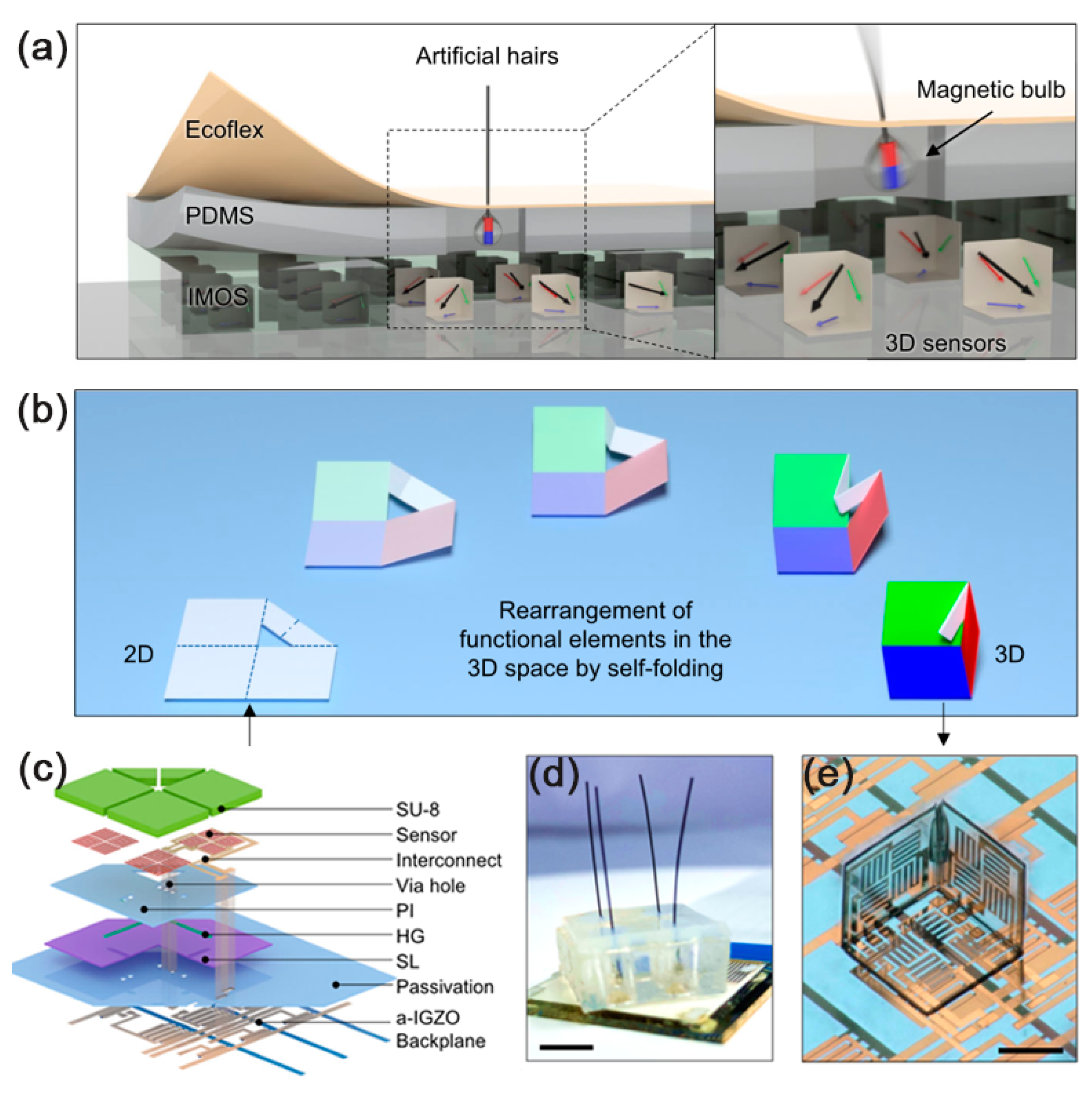
3.1. Geomagnetosensitive E-Skins
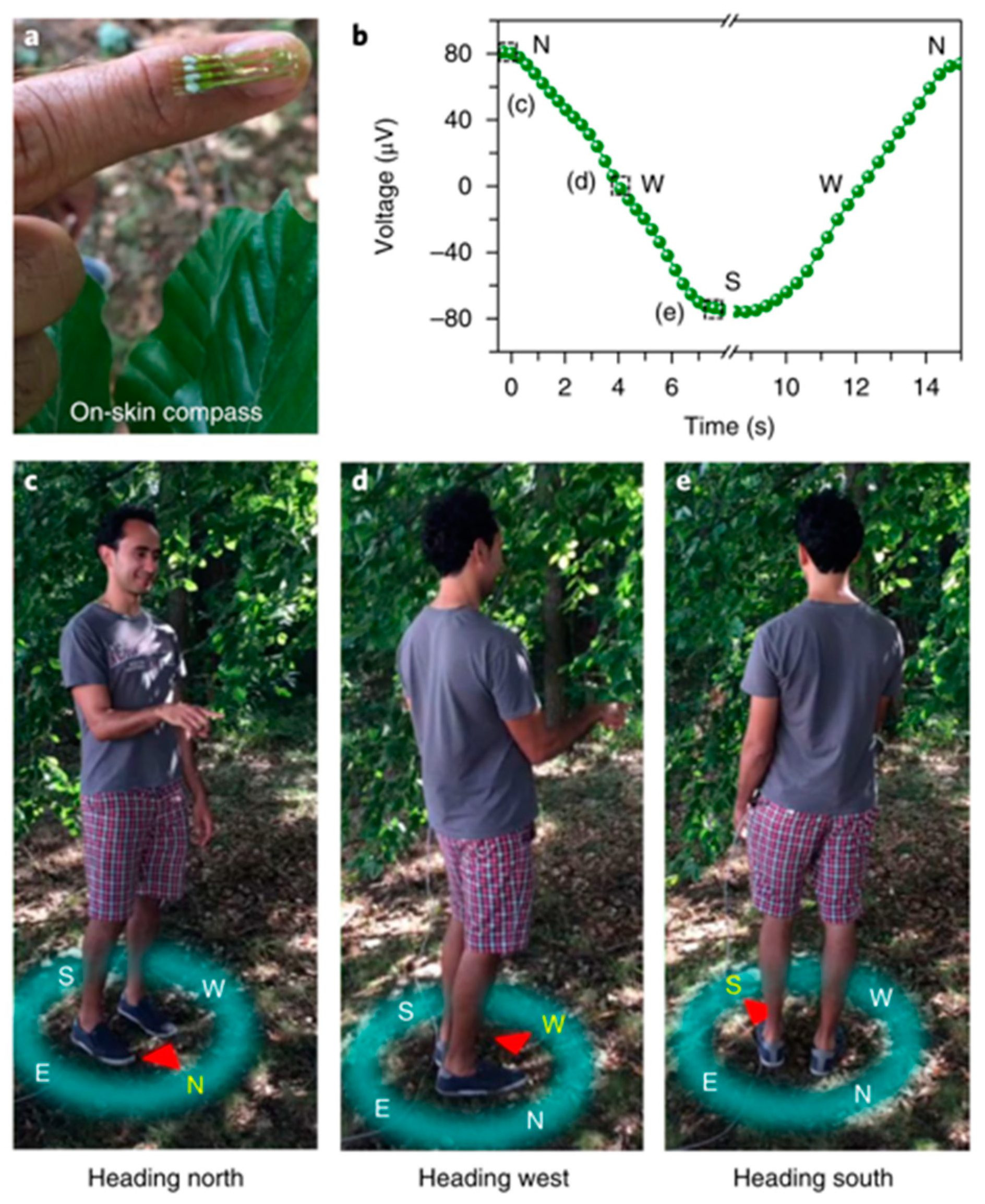
3.2. Magnetoelectric Compass
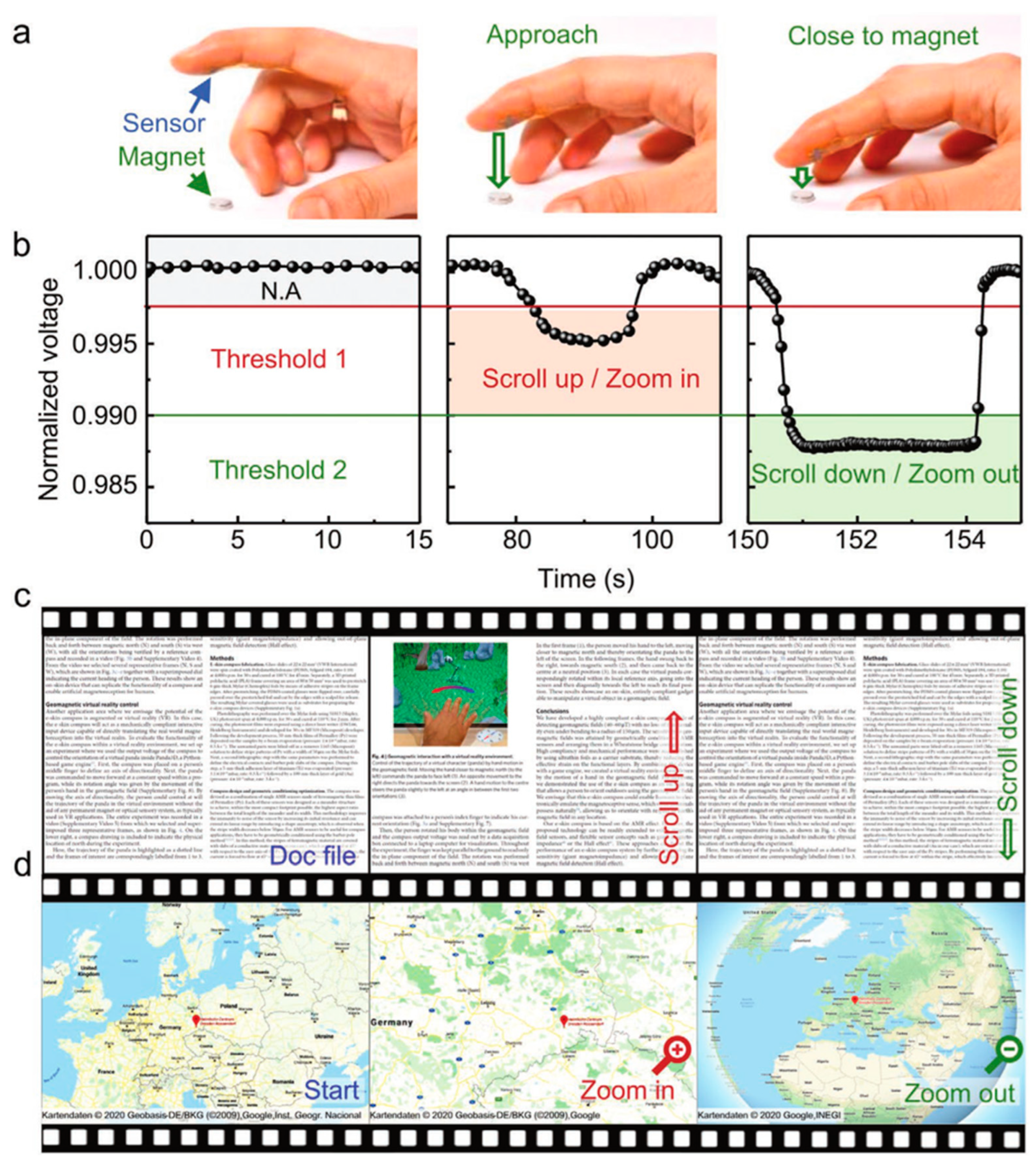
3.3. Non-Contact Interactive Platform
3.4. Hybrid Rigid-Flexible Probe
3.5. Intelligent Medical Detection
4. Summary and Future Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Makarov, D.; Melzer, M.; Karnaushenko, D.; Schmidt, O.G. Shapeable magnetoelectronics. Appl. Phys. Rev. 2016, 3, 011101. [Google Scholar] [CrossRef]
- Hammock, M.L.; Chortos, A.; Tee, B.C.; Tok, J.B.; Bao, Z. 25th anniversary article: The evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.-L.; Xie, Y.-L.; Lu, Z.-X.; Wang, Z.-M.; Li, R.-W. Research progress of flexible magnetic films and devices. Acta Phys. Sin. 2022, 71, 097503. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, M. A review of recent advancements in soft and flexible robots for medical applications. Int. J. Med. Robotics Comput. Assist Surg. 2020, 16, e2096. [Google Scholar] [CrossRef]
- Schwartz, G.; Tee, B.C.K.; Mei, J.; Appleton, A.L.; Kim, D.H.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859. [Google Scholar] [CrossRef]
- Cañón Bermúdez, G.S.; Makarov, D. Magnetosensitive e-skins for interactive devices. Adv. Funct. Mater. 2021, 31, 2007788. [Google Scholar] [CrossRef]
- Kim, D.H.; Lu, N.; Ma, R.; Kim, Y.S.; Kim, R.H.; Wang, S.; Wu, J.; Won, S.M.; Tao, H.; Islam, A.; et al. Epidermal electronics. Science 2011, 333, 838–843. [Google Scholar] [CrossRef]
- Peng, Y.; Yang, N.; Xu, Q.; Dai, Y.; Wang, Z. Recent Advances in Flexible Tactile Sensors for Intelligent Systems. Sensors 2021, 21, 5392. [Google Scholar] [CrossRef]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M.C. Recent developments of magnetoresistive sensors for industrial applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef]
- Zhou, Z.-T.; Yan, S.-H.; Zhao, W.-S.; Leng, Q.-W. Research progress of tunneling magnetoresistance sensor. Acta Phys. Sin. 2022, 71, 058504. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, H.; Alhalili, Z.; Xu, G.; Gao, G. The progress of magnetic sensor applied in biomedicine: A review of non-invasive techniques and sensors. J. Chin. Chem. Soc. 2020, 68, 216–227. [Google Scholar] [CrossRef]
- Cardoso, S.; Leitao, D.C.; Dias, T.M.; Valadeiro, J.; Silva, M.D.; Chicharo, A.; Silverio, V.; Gaspar, J.; Freitas, P.P. Challenges and trends in magnetic sensor integration with microfluidics for biomedical applications. J. Phys. D Appl. Phys. 2017, 50, 213001. [Google Scholar] [CrossRef]
- Liu, Y.-W.; Zhan, Q.-F.; Li, R.-W. Fabrication, properties, and applications of flexible magnetic films. Chin. Phys. B 2013, 22, 127502. [Google Scholar] [CrossRef]
- Sheng, P.; Wang, B.; Li, R. Flexible magnetic thin films and devices. J. Semicond. 2018, 39, 011006. [Google Scholar] [CrossRef]
- Hall, E.H. On a new action of the magnet on electric currents. Am. J. Sci. 1880, 3, 200–205. [Google Scholar] [CrossRef]
- Monch, I.J.; Bahr, F.; Melzer, M.; Karnaushenko, D.; Makarov, D.; Hofmann, W.; Schmidt, O.G. Flexible hall sensorics for flux-based control of magnetic levitation. IEEE Trans. Magn. 2015, 51, 4004004. [Google Scholar] [CrossRef]
- Wang, Z.; Shaygan, M.; Otto, M.; Schall, D.; Neumaier, D. Flexible Hall sensors based on graphene. Nanoscale 2016, 8, 7683–7687. [Google Scholar] [CrossRef]
- Melzer, M.; Monch, J.I.; Makarov, D.; Zabila, Y.; Canon Bermudez, G.S.; Karnaushenko, D.; Baunack, S.; Bahr, F.; Yan, C.; Kaltenbrunner, M.; et al. Wearable magnetic field sensors for flexible electronics. Adv. Mater. 2015, 27, 1274–1280. [Google Scholar] [CrossRef]
- Ernst, D.; Mönch, J.I.; Schmidt, O.G.; Zerna, T. Manufacturing of flexible (ultra-)thin magnetic field sensors. In Proceedings of the 2015 European Microelectronics Packaging Conference (EMPC), Friedrichshafen, Germany, 14–16 September 2015. [Google Scholar]
- Mystkowski, A.; Kierdelewicz, A.; Jastrzebski, R.P.; Dragašius, E.; Eidukynas, D. Flux measurement and conditioning system for heteropolar active magnetic bearing using Kapton-foil Hall sensors. Mech. Syst. Signal. Pr. 2019, 115, 394–404. [Google Scholar] [CrossRef]
- Ernst, D.; Faghih, M.; Liebfried, R.; Melzer, M.; Karnaushenko, D.; Hofmann, W.; Schmidt, O.G.; Zerna, T. Packaging of ultrathin flexible magnetic field sensors with polyimide interposer and integration in an active magnetic bearing. IEEE T. Comp. Pack. Man. 2020, 10, 39–43. [Google Scholar] [CrossRef]
- Heidari, H.; Bonizzoni, E.; Gatti, U.; Maloberti, F.; Dahiya, R. CMOS vertical hall magnetic sensors on flexible substrate. IEEE Sens. J. 2016, 16, 8736–8743. [Google Scholar] [CrossRef]
- Thomson, W. On the electro-dynamic qualities of metals:—Effects of magnetization on the electric conductivity of nickel and of iron. Proc. R. Soc. Lond. 1857, 8, 546–550. [Google Scholar]
- Griesbach, T.; Wurz, M.C.; Rissing, L. Modular eddy current micro sensor. IEEE Trans. Magn. 2011, 47, 3760–3763. [Google Scholar] [CrossRef]
- Gatzen, H.H.; Hansen, S.; Rissing, L. A concept for a toolbox of components for modular magnetic microsensors. ECS Trans. 2007, 3, 235–246. [Google Scholar] [CrossRef]
- Griesbach, T.; Wurz, M.C.; Christopher, R.; Rissing, L. Application of sacrificial layers for the modular micro sensor fabrication on a flexible polymer substrate. In Proceedings of the Sensor and Test Conference, Hanover, Germany, 7–9 June 2011. [Google Scholar]
- Griesbach, T.; Wurz, M.C.; Rissing, L. Design, fabrication, and testing of a modular magnetic field microsensor on a flexible polymer foil. IEEE Trans. Magn. 2012, 48, 3843–3846. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Li, M.; Gao, Y.; Hu, Z.; Nan, T.; Liang, X.; Chen, H.; Yang, J.; Cash, S.; et al. Highly sensitive flexible magnetic sensor based on anisotropic magnetoresistance effect. Adv. Mater. 2016, 28, 9370–9377. [Google Scholar] [CrossRef]
- Wang, C.; Su, W.; Pu, J.; Hu, Z.; Liu, M. A Self-biased Anisotropic Magnetoresistive (AMR) Magnetic Field Sensor on Flexible Kapton. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Marina Bay Sands Convention Centre, Singapore, 23–27 April 2018. [Google Scholar]
- Jogschies, L.; Rittinger, J.; Klaas, D.; Wurz, M.C. Stress Reduction in Sputtered Thin NiFe 81/19 Layers for Magnetic Field Sensors. Procedia Technol. 2016, 26, 162–168. [Google Scholar] [CrossRef]
- Cañón Bermúdez, G.S.; Fuchs, H.; Bischoff, L.; Fassbender, J.; Makarov, D. Electronic-skin compasses for geomagnetic field-driven artificial magnetoreception and interactive electronics. Nat. Electron. 2018, 1, 589–595. [Google Scholar] [CrossRef]
- Wang, C.; Su, W.; Hu, Z.; Pu, J.; Guan, M.; Peng, B.; Li, L.; Ren, W.; Zhou, Z.; Jiang, Z.; et al. Highly Sensitive Magnetic Sensor Based on Anisotropic Magnetoresistance Effect. IEEE Trans. Magn. 2018, 54, 2301103. [Google Scholar] [CrossRef]
- Oliveros Mata, E.S.; Cañón Bermúdez, G.S.; Ha, M.; Kosub, T.; Zabila, Y.; Fassbender, J.; Makarov, D. Printable anisotropic magnetoresistance sensors for highly compliant electronics. Appl. Phys. A 2021, 127, 280. [Google Scholar] [CrossRef]
- Becker, C.; Bao, B.; Karnaushenko, D.D.; Bandari, V.K.; Rivkin, B.; Li, Z.; Faghih, M.; Karnaushenko, D.; Schmidt, O.G. A new dimension for magnetosensitive e-skins: Active matrix integrated micro-origami sensor arrays. Nat. Commun. 2022, 13, 2121. [Google Scholar] [CrossRef] [PubMed]
- Schuhl, A.; Van Dau, F.N.; Childress, J.R. Low-field magnetic sensors based on the planar Hall effect. Appl. Phys. Lett. 1995, 66, 2751–2753. [Google Scholar] [CrossRef]
- Granell, P.N.; Wang, G.; Cañon Bermudez, G.S.; Kosub, T.; Golmar, F.; Steren, L.; Fassbender, J.; Makarov, D. Highly compliant planar Hall effect sensor with sub 200 nT sensitivity. Npj Flex. Electron. 2019, 3, 3. [Google Scholar] [CrossRef]
- Ozer, B.; Piskin, H.; Akdogan, N. Shapeable planar hall sensor with a stable sensitivity under concave and convex bending. IEEE Sens. J. 2019, 19, 5493–5498. [Google Scholar] [CrossRef]
- Sinha, B.; Quang Hung, T.; Sri Ramulu, T.; Oh, S.; Kim, K.; Kim, D.-Y.; Terki, F.; Kim, C. Planar Hall resistance ring sensor based on NiFe/Cu/IrMn trilayer structure. J. Appl. Phys. 2013, 113, 063903. [Google Scholar] [CrossRef]
- Kim, M.; Oh, S.; Jeong, W.; Talantsev, A.; Jeon, T.; Chaturvedi, R.; Lee, S.; Kim, C. Highly Bendable Planar Hall Resistance Sensor. IEEE Magnetics Letters 2020, 11, 4100705. [Google Scholar] [CrossRef]
- Grunberg, P.; Schreiber, R.; Pang, Y.; Brodsky, M.B.; Sowers, H. Layered magnetic structures: Evidence for antiferromagnetic coupling of Fe layers across Cr interlayers. Phys. Rev. Lett. 1986, 57, 2442–2445. [Google Scholar] [CrossRef]
- Baibich, M.N.; Broto, J.M.; Fert, A.; Nguyen Van Dau, F.; Petroff, F.; Etienne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant magnetoresistance of (001)Fe/(001)Cr magnetic superlattices. Phys. Rev. Lett. 1988, 61, 2472–2475. [Google Scholar] [CrossRef]
- Binasch, G.; Grunberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 1989, 39, 4828–4830. [Google Scholar] [CrossRef]
- Dieny, B.; Speriosu, V.S.; Metin, S.; Parkin, S.S.P.; Gurney, B.A.; Baumgart, P.; Wilhoit, D.R. Magnetotransport properties of magnetically soft spin-valve structures (invited). J. Appl. Phys. 1991, 69, 4774–4779. [Google Scholar] [CrossRef]
- Parkin, S.S.; Bhadra, R.; Roche, K.P. Oscillatory magnetic exchange coupling through thin copper layers. Phys. Rev. Lett. 1991, 66, 2152–2155. [Google Scholar] [CrossRef] [PubMed]
- Parkin, S.S.P.; Roche, K.P.; Suzuki, T. Giant Magnetoresistance in Antiferromagnetic Co/Cu Multilayers Grown on Kapton. Jpn. J. Appl. Phys. 1992, 31, L1246–L1249. [Google Scholar] [CrossRef]
- Parkin, S.S.P. Flexible giant magnetoresistance sensors. Appl. Phys. Lett. 1996, 69, 3092–3094. [Google Scholar] [CrossRef]
- Yan, F.; Xue, G.; Wan, F. A flexible giant magnetoresistance sensor prepared completely by electrochemical synthesis. J. Mater. Chem. 2002, 12, 2606–2608. [Google Scholar] [CrossRef]
- Zhang, X.; Zhan, Q.; Dai, G.; Liu, Y.; Zuo, Z.; Yang, H.; Chen, B.; Li, R.-W. Effect of buffer layer and external stress on magnetic properties of flexible FeGa films. J. Appl. Phys. 2013, 113, 17a901. [Google Scholar] [CrossRef]
- Chen, Y.-F.; Mei, Y.; Kaltofen, R.; Mönch, J.I.; Schumann, J.; Freudenberger, J.; Klauß, H.-J.; Schmidt, O.G. Towards Flexible Magnetoelectronics: Buffer-Enhanced and Mechanically Tunable GMR of Co/Cu Multilayers on Plastic Substrates. Adv. Mater. 2008, 20, 3224–3228. [Google Scholar] [CrossRef]
- Pérez, N.; Melzer, M.; Makarov, D.; Ueberschär, O.; Ecke, R.; Schulz, S.E.; Schmidt, O.G. High-performance giant magnetoresistive sensorics on flexible Si membranes. Appl. Phys. Lett. 2015, 106, 153501. [Google Scholar] [CrossRef]
- Uhrmann, T.; Bär, L.; Dimopoulos, T.; Wiese, N.; Rührig, M.; Lechner, A. Magnetostrictive GMR sensor on flexible polyimide substrates. J. Magn. Magn. Mater. 2006, 307, 209–211. [Google Scholar] [CrossRef]
- Anwarzai, B.; Ac, V.; Luby, S.; Majkova, E.; Senderak, R. Pseudo spin-valve on plastic substrate as sensing elements of mechanical strain. Vacuum 2009, 84, 108–110. [Google Scholar] [CrossRef]
- Liu, L.; Zhan, Q.; Yang, H.; Li, H.; Zhang, S.; Liu, Y.; Wang, B.; Tan, X.; Li, R.-W. Magnetostrictive GMR spin valves with composite FeGa/FeCo free layers. AIP Adv. 2016, 6, 035206. [Google Scholar] [CrossRef]
- Kwon, J.H.; Kwak, W.Y.; Cho, B.K. Magnetization Manipulation of a Flexible Magnetic Sensor by Controlled Stress Application. Sci Rep 2018, 8, 15765. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhan, Q.; Dai, G.; Liu, Y.; Zuo, Z.; Yang, H.; Chen, B.; Li, R.-W. Effect of mechanical strain on magnetic properties of flexible exchange biased FeGa/IrMn heterostructures. Appl. Phys. Lett. 2013, 102, 022412. [Google Scholar] [CrossRef]
- Ota, S.; Ando, A.; Chiba, D. A flexible giant magnetoresistive device for sensing strain direction. Nat. Electron. 2018, 1, 124–129. [Google Scholar] [CrossRef]
- Neto, M.; Ribeiro, P.; Nunes, R.; Jamone, L.; Bernardino, A.; Cardoso, S. A Soft Tactile Sensor Based on Magnetics and Hybrid Flexible-Rigid Electronics. Sensors 2021, 21, 5098. [Google Scholar] [CrossRef]
- Ribeiro, P.; Khan, M.A.; Alfadhel, A.; Kosel, J.; Franco, F.; Cardoso, S.; Bernardino, A.; Santos-Victor, J.; Jamone, L. A Miniaturized Force Sensor Based on Hair-Like Flexible Magnetized Cylinders Deposited Over a Giant Magnetoresistive Sensor. IEEE Trans. Magn. 2017, 53, 4700205. [Google Scholar] [CrossRef]
- Ge, J.; Wang, X.; Drack, M.; Volkov, O.; Liang, M.; Canon Bermudez, G.S.; Illing, R.; Wang, C.; Zhou, S.; Fassbender, J.; et al. A bimodal soft electronic skin for tactile and touchless interaction in real time. Nat. Commun. 2019, 10, 4405. [Google Scholar] [CrossRef]
- Melzer, M.; Makarov, D.; Calvimontes, A.; Karnaushenko, D.; Baunack, S.; Kaltofen, R.; Mei, Y.; Schmidt, O.G. Stretchable magnetoelectronics. Nano Lett. 2011, 11, 2522–2526. [Google Scholar] [CrossRef]
- Melzer, M.; Karnaushenko, D.; Makarov, D.; Baraban, L.; Calvimontes, A.; Mönch, I.; Kaltofen, R.; Mei, Y.; Schmidt, O.G. Elastic magnetic sensor with isotropic sensitivity for in-flow detection of magnetic objects. RSC Adv. 2012, 2, 2284–2288. [Google Scholar] [CrossRef]
- Lin, G.; Makarov, D.; Melzer, M.; Si, W.; Yan, C.; Schmidt, O.G. A highly flexible and compact magnetoresistive analytic device. Lab. Chip. 2014, 14, 4050–4058. [Google Scholar] [CrossRef]
- Melzer, M.; Kopylov, A.; Makarov, D.; Schmidt, O.G. Stretchability and Self-Healing of Wrinkled Gmr Multilayers on Elastomeric Membranes. Spin 2013, 03, 1340005. [Google Scholar] [CrossRef]
- Melzer, M.; Lin, G.; Makarov, D.; Schmidt, O.G. Stretchable spin valves on elastomer membranes by predetermined periodic fracture and random wrinkling. Adv. Mater. 2012, 24, 6468–6472. [Google Scholar] [CrossRef] [PubMed]
- Melzer, M.; Karnaushenko, D.; Lin, G.; Baunack, S.; Makarov, D.; Schmidt, O.G. Direct transfer of magnetic sensor devices to elastomeric supports for stretchable electronics. Adv. Mater. 2015, 27, 1333–1338. [Google Scholar] [CrossRef] [PubMed]
- Melzer, M.; Kaltenbrunner, M.; Makarov, D.; Karnaushenko, D.; Karnaushenko, D.; Sekitani, T.; Someya, T.; Schmidt, O.G. Imperceptible magnetoelectronics. Nat. Commun. 2015, 6, 6080. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Zhan, Q.; Liu, Y.; Liu, L.; Yang, H.; Zuo, Z.; Shang, T.; Wang, B.; Li, R.W. Stretchable Spin Valve with Stable Magnetic Field Sensitivity by Ribbon-Patterned Periodic Wrinkles. ACS Nano 2016, 10, 4403–4409. [Google Scholar] [CrossRef]
- Zhang, S.; Zhan, Q.; Yu, Y.; Liu, L.; Li, H.; Yang, H.; Xie, Y.; Wang, B.; Xie, S.; Li, R.-W. Surface morphology and magnetic property of wrinkled FeGa thin films fabricated on elastic polydimethylsiloxane. Appl. Phys. Lett. 2016, 108, 102409. [Google Scholar] [CrossRef]
- Yin, H.; Zhou, Z.; Cheng, W.; Jiang, D.; Zhao, Z.; Zhan, Q. Surface morphology and magnetic anisotropy of zigzag wrinkled NiFe films grown on polydimethylsiloxane. J. Magn. Magn. Mater. 2020, 497, 165911. [Google Scholar] [CrossRef]
- Melzer, M.; Makarov, D.; Schmidt, O.G. A review on stretchable magnetic field sensorics. J. Phys. D: Appl. Phys. 2019, 53, 083002. [Google Scholar] [CrossRef]
- Karnaushenko, D.; Makarov, D.; Stober, M.; Karnaushenko, D.D.; Baunack, S.; Schmidt, O.G. High-performance magnetic sensorics for printable and flexible electronics. Adv. Mater. 2015, 27, 880–885. [Google Scholar] [CrossRef]
- Ha, M.; Canon Bermudez, G.S.; Kosub, T.; Monch, I.; Zabila, Y.; Oliveros Mata, E.S.; Illing, R.; Wang, Y.; Fassbender, J.; Makarov, D. Printable and Stretchable Giant Magnetoresistive Sensors for Highly Compliant and Skin-Conformal Electronics. Adv. Mater. 2021, 33, e2005521. [Google Scholar] [CrossRef]
- Julliere, M. Tunneling between ferromagnetic films. Phys. Lett. A 1975, 54, 225–226. [Google Scholar] [CrossRef]
- Moodera, J.S.; Kinder, L.R.; Wong, T.M.; Meservey, R. Large magnetoresistance at room temperature in ferromagnetic thin film tunnel junctions. Phys. Rev. Lett. 1995, 74, 3273–3276. [Google Scholar] [CrossRef] [PubMed]
- Miyazaki, T.; Tezuka, N. Giant magnetic tunneling effect in Fe/Al2O3/Fe junction. J. Magn. Magn. Mater. 1995, 139, L231–L234. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Q.; Khawaja, A.H. Interference-rejecting current measurement method with tunnel magnetoresistive magnetic sensor array. IET Sci. Meas. Technol. 2018, 12, 733–738. [Google Scholar] [CrossRef]
- Franco, F.; Dias, R.A.; Gaspar, J.; de Freitas, S.C.; Freitas, P.P. Hybrid Rigid-Flexible Magnetoresistive Device Based on a Wafer Level Packaging Technology for Micrometric Proximity Measurements. IEEE Sens. J. 2019, 19, 12363–12368. [Google Scholar] [CrossRef]
- Yuan, X.a.; Li, W.; Chen, G.; Yin, X.; Ge, J.; Yang, W.; Liu, J.; Ma, W. Inner circumferential current field testing system with TMR sensor arrays for inner-wall cracks inspection in aluminum tubes. Measurement 2018, 122, 232–239. [Google Scholar] [CrossRef]
- Ye, C.; Laureti, S.; Malekmohammadi, H.; Wang, Y.; Ricci, M. Swept-Frequency eddy current excitation for TMR array sensor and Pulse-Compression: Feasibility study and quantitative comparison of time and frequency domains processing. Measurement 2022, 187, 110249. [Google Scholar] [CrossRef]
- Fan, X.; He, Y.; Chen, T.; Hou, C. Research on crack monitoring technology of flexible eddy current array sensor based on TMR sensors. Measurement 2022, 192, 110926. [Google Scholar] [CrossRef]
- Jin, Z.; Mohd Noor Sam, M.A.I.; Oogane, M.; Ando, Y. Serial MTJ-Based TMR Sensors in Bridge Configuration for Detection of Fractured Steel Bar in Magnetic Flux Leakage Testing. Sensors 2021, 21, 668. [Google Scholar] [CrossRef]
- Huang, H.-S.; Liao, S.-H.; Yang, Y.; Sokolov, A.; Liu, Y.-F.; Yin, X.; Viera, L.C.; Liou, S.-H. A Study of Hysteresis Reduction of Small AC Magnetic Field Modulated Tunneling Magnetoresistive Sensor. IEEE Trans. Magn. 2022, 58, 4001004. [Google Scholar] [CrossRef]
- Ye, C.; Wang, Y.; Tao, Y. High-Density Large-Scale TMR Sensor Array for Magnetic Field Imaging. IEEE Trans. Instrum. Meas. 2019, 68, 2594–2601. [Google Scholar] [CrossRef]
- Sun, X.; Huang, Q.; Hou, Y.; Jiang, L.; Pong, P.W.T. Noncontact Operation-State Monitoring Technology Based on Magnetic-Field Sensing for Overhead High-Voltage Transmission Lines. IEEE T Power. Deliv. 2013, 28, 2145–2153. [Google Scholar] [CrossRef]
- Wang, M.; Wang, Y.; Peng, L.; Ye, C. Measurement of Triaxial Magnetocardiography Using High Sensitivity Tunnel Magnetoresistance Sensor. IEEE Sens. J. 2019, 19, 9610–9615. [Google Scholar] [CrossRef]
- Barraud, C.; Deranlot, C.; Seneor, P.; Mattana, R.; Dlubak, B.; Fusil, S.; Bouzehouane, K.; Deneuve, D.; Petroff, F.; Fert, A. Magnetoresistance in magnetic tunnel junctions grown on flexible organic substrates. Appl. Phys. Lett. 2010, 96, 072502. [Google Scholar] [CrossRef]
- Donolato, M.; Tollan, C.; Porro, J.M.; Berger, A.; Vavassori, P. Flexible and stretchable polymers with embedded magnetic nanostructures. Adv. Mater. 2013, 25, 623–629. [Google Scholar] [CrossRef] [PubMed]
- Ota, S.; Ando, A.; Sekitani, T.; Koyama, T.; Chiba, D. Flexible CoFeB/MgO-based magnetic tunnel junctions annealed at high temperature (≥350 °C). Appl. Phys. Lett. 2019, 115, 202401. [Google Scholar] [CrossRef]
- Bedoya-Pinto, A.; Donolato, M.; Gobbi, M.; Hueso, L.E.; Vavassori, P. Flexible spintronic devices on Kapton. Appl. Phys. Lett. 2014, 104, 062412. [Google Scholar] [CrossRef]
- Gaspar, J.; Fonseca, H.; Paz, E.; Martins, M.; Valadeiro, J.; Cardoso, S.; Ferreira, R.; Freitas, P.P. Flexible Magnetoresistive Sensors Designed for Conformal Integration. IEEE Trans. Magn. 2017, 53, 5300204. [Google Scholar] [CrossRef]
- Loong, L.M.; Lee, W.; Qiu, X.; Yang, P.; Kawai, H.; Saeys, M.; Ahn, J.H.; Yang, H. Flexible MgO Barrier Magnetic Tunnel Junctions. Adv. Mater. 2016, 28, 4983–4990. [Google Scholar] [CrossRef]
- Chen, J.Y.; Lau, Y.C.; Coey, J.M.; Li, M.; Wang, J.P. High Performance MgO-barrier Magnetic Tunnel Junctions for Flexible and Wearable Spintronic Applications. Sci. Rep. 2017, 7, 42001. [Google Scholar] [CrossRef]
- Amara, S.; Sevilla, G.A.T.; Hawsawi, M.; Mashraei, Y.; Mohammed, H.; Cruz, M.E.; Ivanov, Y.P.; Jaiswal, S.; Jakob, G.; Kläui, M.; et al. High-Performance Flexible Magnetic Tunnel Junctions for Smart Miniaturized Instruments. Adv. Eng. Mater. 2018, 20, 1800471. [Google Scholar] [CrossRef]
- Fernandez, E.; Kurlyandskaya, G.V.; Garcia-Arribas, A.; Svalov, A.V. Nanostructured giant magneto-impedance multilayers deposited onto flexible substrates for low pressure sensing. Nanoscale Res. Lett. 2012, 7, 230. [Google Scholar] [CrossRef] [PubMed]
- Phan, M.-H.; Peng, H.-X. Giant magnetoimpedance materials: Fundamentals and applications. Prog. Mater Sci. 2008, 53, 323–420. [Google Scholar] [CrossRef]
- Karnaushenko, D.; Karnaushenko, D.D.; Makarov, D.; Baunack, S.; Schafer, R.; Schmidt, O.G. Self-Assembled On-Chip-Integrated Giant Magneto-Impedance Sensorics. Adv. Mater. 2015, 27, 6582–6589. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Kavaldzhiev, M.N.; Kosel, J. Flexible magnetoimpedance sensor. J. Magn. Magn. Mater. 2015, 378, 499–505. [Google Scholar] [CrossRef]
- Agra, K.; Mori, T.J.A.; Dorneles, L.S.; Escobar, V.M.; Silva, U.C.; Chesman, C.; Bohn, F.; Corrêa, M.A. Dynamic magnetic behavior in non-magnetostrictive multilayered films grown on glass and flexible substrates. J. Magn. Magn. Mater. 2014, 355, 136–141. [Google Scholar] [CrossRef]
- Svalov, A.V.; González Asensio, B.; Chlenova, A.A.; Savin, P.A.; Larrañaga, A.; Gonzalez, J.M.; Kurlyandskaya, G.V. Study of the effect of the deposition rate and seed layers on structure and magnetic properties of magnetron sputtered FeNi films. Vacuum 2015, 119, 245–249. [Google Scholar] [CrossRef]
- Kurlyandskaya, G.V.; Fernández, E.; Svalov, A.; Burgoa Beitia, A.; García-Arribas, A.; Larrañaga, A. Flexible thin film magnetoimpedance sensors. J. Magn. Magn. Mater. 2016, 415, 91–96. [Google Scholar] [CrossRef]
- Singh, B.; Otálora, J.A.; Kang, T.H.; Soldatov, I.; Karnaushenko, D.D.; Becker, C.; Schäfer, R.; Karnaushenko, D.; Neu, V.; Schmidt, O.G. Self-assembly as a tool to study microscale curvature and strain-dependent magnetic properties. Npj Flex. Electron. 2022, 6, 76. [Google Scholar] [CrossRef]
- Alfadhel, A.; Kosel, J. Magnetic Nanocomposite Cilia Tactile Sensor. Adv. Mater. 2015, 27, 7888–7892. [Google Scholar] [CrossRef]
- Astrov, D.N. Magnetoelectric effect in chromium oxide. Sov. Phys. JETP 1961, 13, 729–733. [Google Scholar]
- Rado, G.T.; Folen, V.J. Observation of the Magnetically Induced Magnetoelectric Effect and Evidence for Antiferromagnetic Domains. Phys. Rev. Lett. 1961, 7, 310–311. [Google Scholar] [CrossRef]
- Zhai, J.; Dong, S.; Xing, Z.; Li, J.; Viehland, D. Giant magnetoelectric effect in Metglas/polyvinylidene-fluoride laminates. Appl. Phys. Lett. 2006, 89, 083507. [Google Scholar] [CrossRef]
- Jing, W.Q.; Fang, F. A flexible multiferroic composite with high self-biased magnetoelectric coupling. Compos. Sci. Technol. 2017, 153, 145–150. [Google Scholar] [CrossRef]
- Mu, X.; Zhang, H.; Zhang, C.; Yang, S.; Xu, J.; Huang, Y.; Xu, J.; Zhang, Y.; Li, Q.; Wang, X.; et al. Poly(vinylidene fluoride-trifluoroethylene)/cobalt ferrite composite films with a self-biased magnetoelectric effect for flexible AC magnetic sensors. J. Mater. Sci. 2021, 56, 9728–9740. [Google Scholar] [CrossRef]
- Song, J.; Zhang, Q.; Pan, S.; Du, Y.; Wu, Z.; Li, S.; Zhang, W.; Sang, S. Synthesis of C60-Coated Ferric Oxide and Its Application in Detecting Magnetic Field. J. Supercond. Nov. Magn. 2020, 33, 3975–3981. [Google Scholar] [CrossRef]
- Reis, S.; Castro, N.; Silva, M.P.; Correia, V.; Rocha, J.G.; Martins, P.; Lanceros-Mendez, S. Fabrication and Characterization of High-Performance Polymer-Based Magnetoelectric DC Magnetic Field Sensors Devices. IEEE T Ind. Electron. 2017, 64, 4928–4934. [Google Scholar] [CrossRef]
- Chlaihawi, A.A.; Emamian, S.; Narakathu, B.B.; Ali, M.M.; Maddipatla, D.; Bazuin, B.J.; Atashbar, M.Z. Novel Screen Printed Flexible Magnetoelectric Thin Film Sensor. Procedia Eng. 2016, 168, 684–687. [Google Scholar] [CrossRef]
- Yang, N.; Wu, H.; Wang, S.; Yuan, G.; Zhang, J.; Sokolov, O.; Bichurin, M.I.; Wang, K.; Wang, Y. Ultrasensitive flexible magnetoelectric sensor. APL Mater. 2021, 9, 021123. [Google Scholar] [CrossRef]
- Sang, M.; Wang, S.; Liu, M.; Bai, L.; Jiang, W.; Xuan, S.; Gong, X. Fabrication of a piezoelectric polyvinylidene fluoride/carbonyl iron (PVDF/CI) magnetic composite film towards the magnetic field and deformation bi-sensor. Compos. Sci. Technol. 2018, 165, 31–38. [Google Scholar] [CrossRef]
- Malley, S.; Newacheck, S.; Youssef, G. Additively manufactured multifunctional materials with magnetoelectric properties. Addit. Manuf. 2021, 47, 102239. [Google Scholar] [CrossRef]
- Verma, K.C.; Singh, M.; Kotnala, R.K.; Goyal, N. Magnetic field control of polarization/capacitance/voltage/resistance through lattice strain in BaTiO3-CoFe2O4 multiferroic nanocomposite. J. Magn. Magn. Mater. 2019, 469, 483–493. [Google Scholar] [CrossRef]
- Xiong, Z.; Cao, L. High magnetic-dielectric tunability in Ni nanocrystals embedded BaTiO3 films. J. Alloys Compd. 2019, 785, 200–205. [Google Scholar] [CrossRef]
- Oliveira, J.; Correia, V.; Castro, H.; Martins, P.; Lanceros-Mendez, S. Polymer-based smart materials by printing technologies: Improving application and integration. Addit. Manuf. 2018, 21, 269–283. [Google Scholar] [CrossRef]
- Dimogianopoulos, D.G.; Charitidis, P.J.; Mouzakis, D.E. Inducing Damage Diagnosis Capabilities in Carbon Fiber Reinforced Polymer Composites by Magnetoelastic Sensor Integration via 3D Printing. Appl. Sci. 2020, 10, 1029. [Google Scholar] [CrossRef]
- Yuan, X.; Gao, X.; Shen, X.; Yang, J.; Li, Z.; Dong, S. A 3D-printed, alternatively tilt-polarized PVDF-TrFE polymer with enhanced piezoelectric effect for self-powered sensor application. Nano Energy 2021, 85, 105985. [Google Scholar] [CrossRef]
- Lima, A.C.; Pereira, N.; Policia, R.; Ribeiro, C.; Correia, V.; Lanceros-Mendez, S.; Martins, P. All-printed multilayer materials with improved magnetoelectric response. J. Mater. Chem. C 2019, 7, 5394–5400. [Google Scholar] [CrossRef]
- Martins, P.; Nunes, J.S.; Oliveira, J.; Peřinka, N.; Lanceros-Mendez, S. Spray-printed magnetoelectric multifunctional composites. Compos. Part B Eng. 2020, 187, 107829. [Google Scholar] [CrossRef]
- Martins, P.; Lasheras, A.; Gutierrez, J.; Barandiaran, J.M.; Orue, I.; Lanceros-Mendez, S. Optimizing piezoelectric and magnetoelectric responses on CoFe2O4/P(VDF-TrFE) nanocomposites. J. Phys. D Appl. Phys. 2011, 44, 495303. [Google Scholar] [CrossRef]
- Reis, S.; Silva, M.P.; Castro, N.; Correia, V.; Gutierrez, J.; Lasheras, A.; Lanceros-Mendez, S.; Martins, P. Optimized anisotropic magnetoelectric response of Fe61.6Co16.4Si10.8B11.2/PVDF/Fe61.6Co16.4Si10.8B11.2 laminates for AC/DC magnetic field sensing. Smart Mater. Struct. 2016, 25, 055050. [Google Scholar] [CrossRef]
- Zong, Y.; Zheng, T.; Martins, P.; Lanceros-Mendez, S.; Yue, Z.; Higgins, M.J. Cellulose-based magnetoelectric composites. Nat. Commun. 2017, 8, 38. [Google Scholar] [CrossRef]
- Wu, J.; Hu, Z.; Gao, X.; Cheng, M.; Zhao, X.; Su, W.; Wang, Z.; Zhou, Z.; Dong, S.; Liu, M. A Magnetoelectric Compass for In-Plane AC Magnetic Field Detection. IEEE T Ind. Electron. 2021, 68, 3527–3536. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Material | Substrate (Thickness) | Sensitivity | Technique | Minimum Bending Radius/ Maximum Tensile Strain | Ref. |
|---|---|---|---|---|---|---|
| Hall | graphene | Kapton (50 µm) | 79 V/AT | chemical vapor deposition | 4 mm | [17] |
| Bismuth | Kapton (100 μm) | −2.3 V/AT | magnetron sputtering | 6 mm | [18] | |
| 4 chips | Kapton (150 μm) | 59 ± 1 V/AT | CMOS | 10 mm | [22] | |
| AMR | Py | PET (6 μm) | 5.4 V/T | e-beam evaporation | 0.15 mm | [31] |
| Py | PET (100 μm) | 5 V/T | magnetron sputtering | 5 mm | [28] | |
| GMR | Co/Cu multilayers | PDMS (40 µm) | - | magnetron sputtering | 4.5% | [60] |
| Co/Cu and Py/Cu multilayers | PET (1.4 μm) | 220%/T | pre-strain induced mechanically | 0.003 mm/270% | [66] | |
| Py/Cu multilayers | SBS (3 μm) | 300%/T | screen printing | 0.016 mm/100% | [72] | |
| Py/Cu multilayers | PDMS (60 µm) | 220%/T | pre-strain induced thermally | 30% | [65] | |
| TMR | Co/Al2O3-based | Gel-film (300 µm) | - | DC sputter | 15 mm/1% | [86] |
| MgO-barrier | Si (3–5 μm) | 49,300%/T | deep-reactive-ion-etching | 0.5 mm | [93] | |
| MI | Py/Cu/Py | imide- and acrylic-based polymers | 500,000%/T | CMOS | - | [94] |
| Py/Cu/Py | Kapton (125 µm) | 92,000%/T | e-beam evaporation | 72 mm | [97] | |
| ME | (P(VDF-TrFE)/CFO | - | - | solution casting | - | [107] |
| FCSB/PVDF/FCSB | - | 150 V/T 14,000 V/T | single-roller quenching | - | [122] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, L.; Xie, Y.; Yang, H.; Li, M.; Bao, X.; Shang, J.; Li, R.-W. Flexible Magnetic Sensors. Sensors 2023, 23, 4083. https://doi.org/10.3390/s23084083
Pan L, Xie Y, Yang H, Li M, Bao X, Shang J, Li R-W. Flexible Magnetic Sensors. Sensors. 2023; 23(8):4083. https://doi.org/10.3390/s23084083
Chicago/Turabian StylePan, Lili, Yali Xie, Huali Yang, Mengchao Li, Xilai Bao, Jie Shang, and Run-Wei Li. 2023. "Flexible Magnetic Sensors" Sensors 23, no. 8: 4083. https://doi.org/10.3390/s23084083