


Fuzzy Control Application to an Irrigation System of Hydroponic Crops under Greenhouse: Case Cultivation of Strawberries (Fragaria Vesca)
 , , , and
, , , and
Abstract
1. Introduction
2. Methods
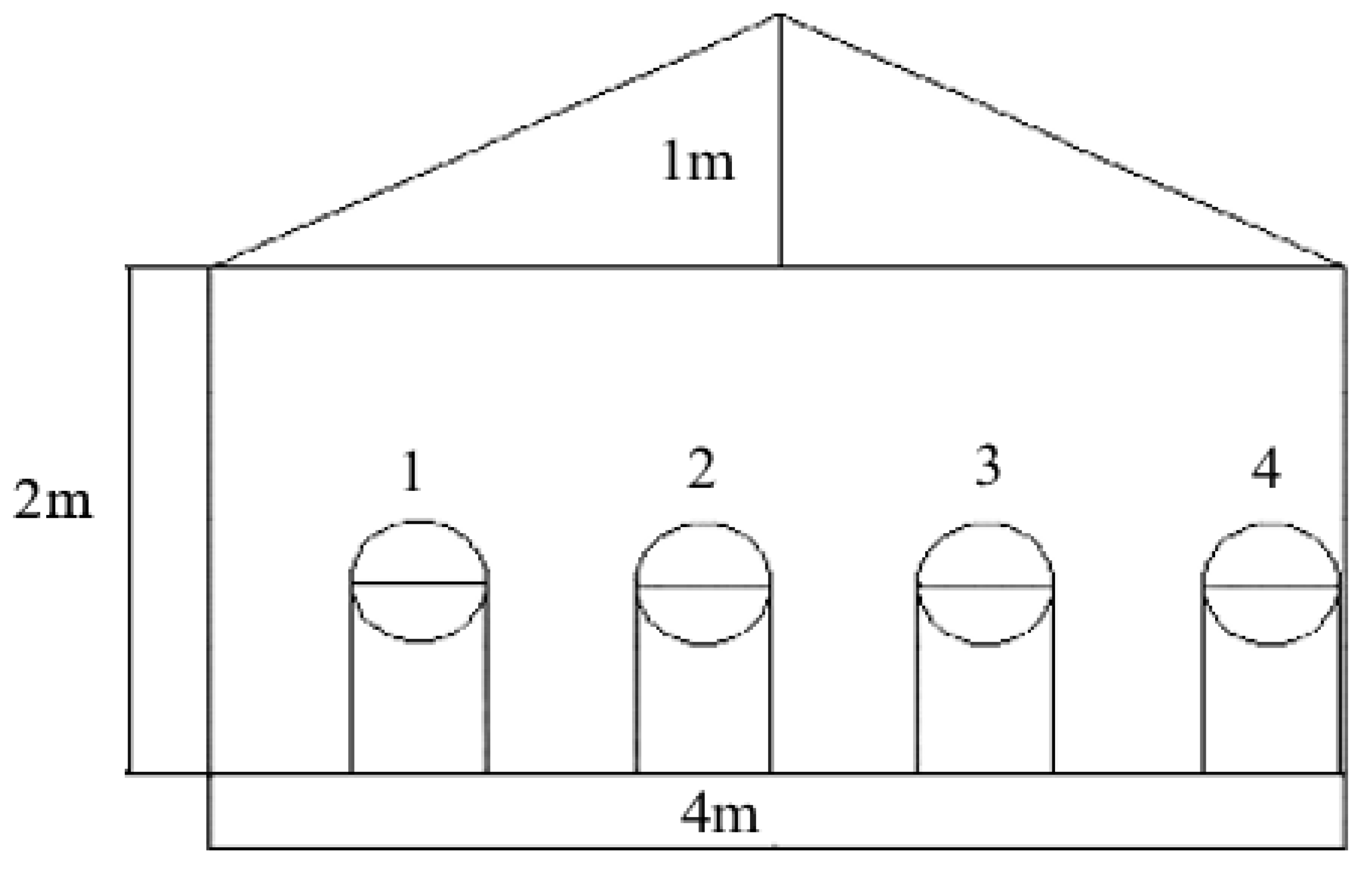
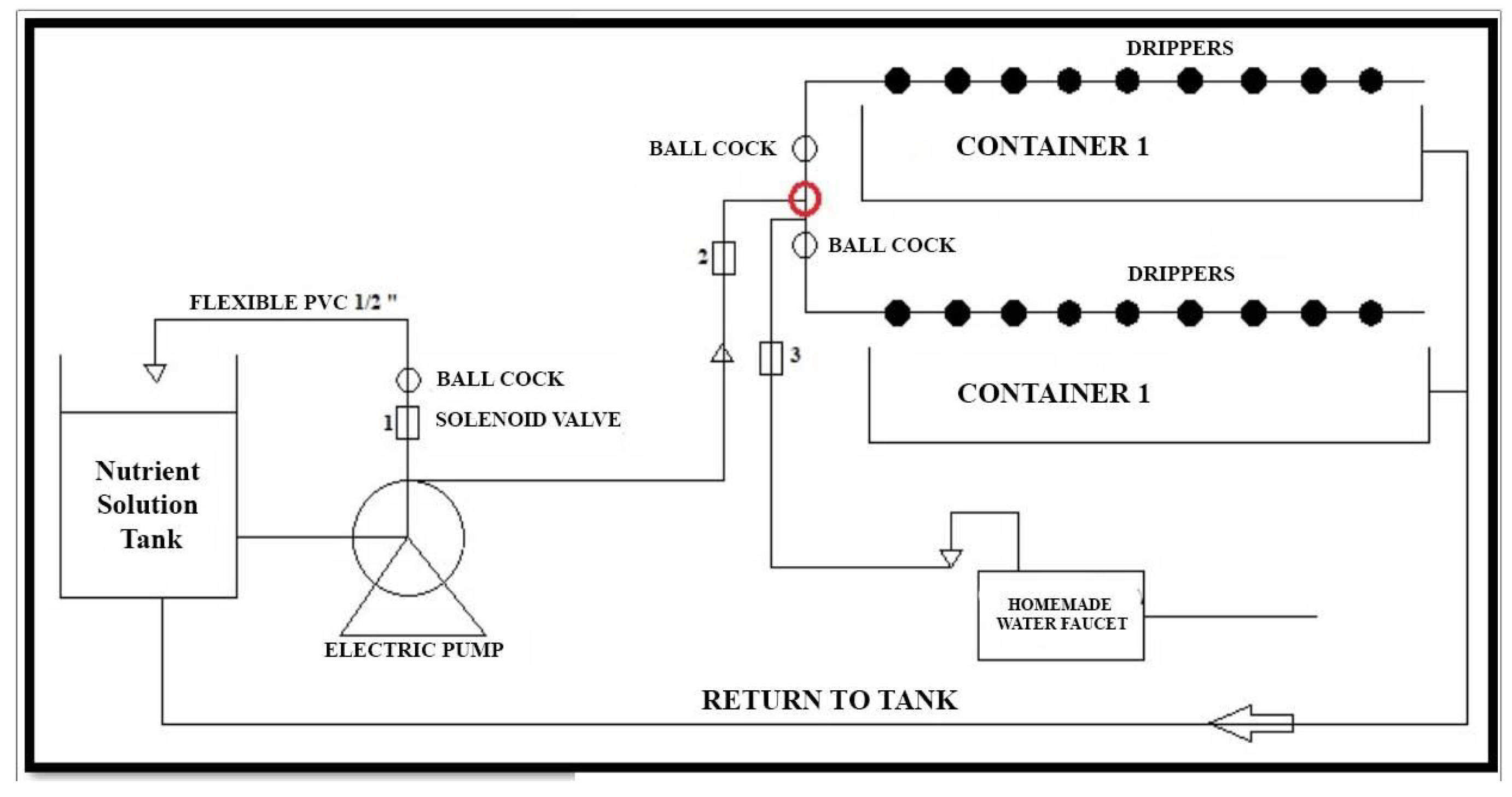
2.1. Greenhouse and Hydroponic Crops
2.2. Sensorization
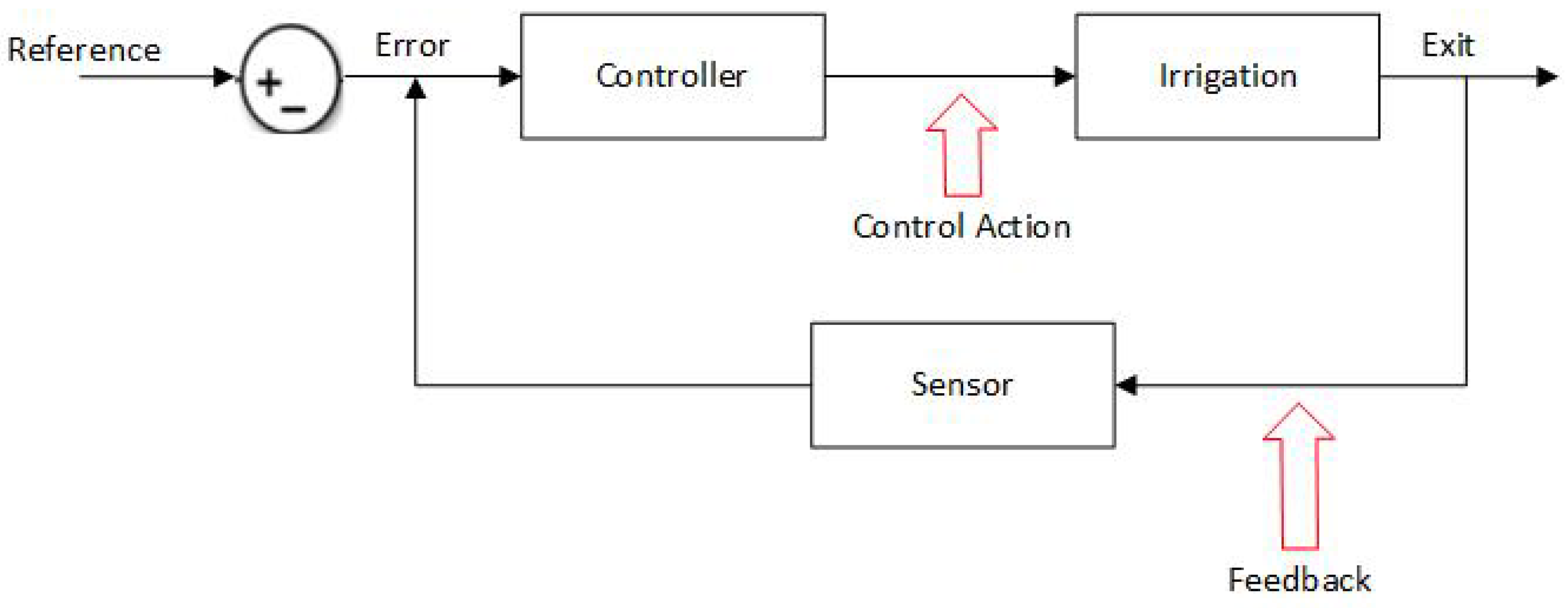
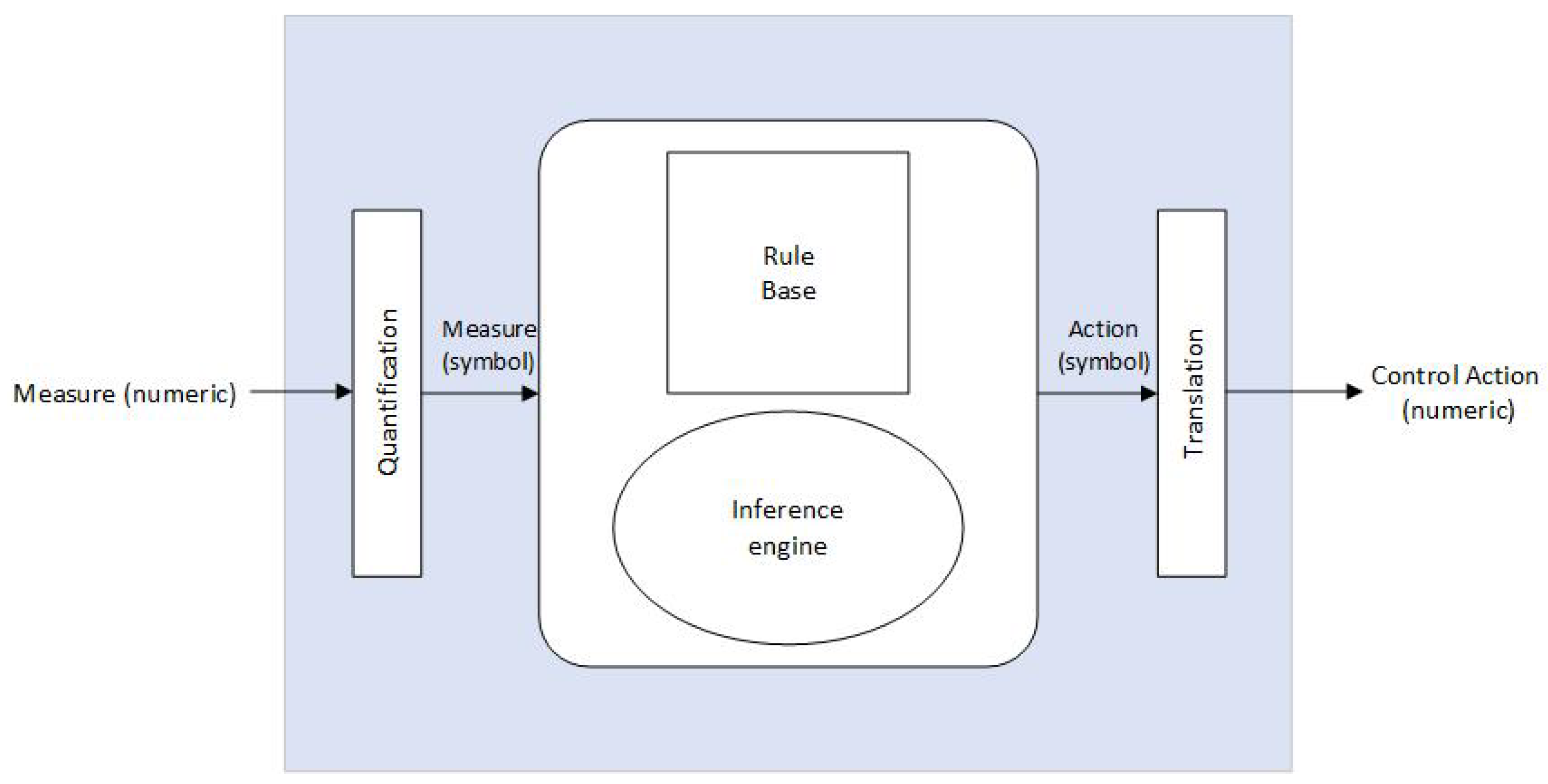
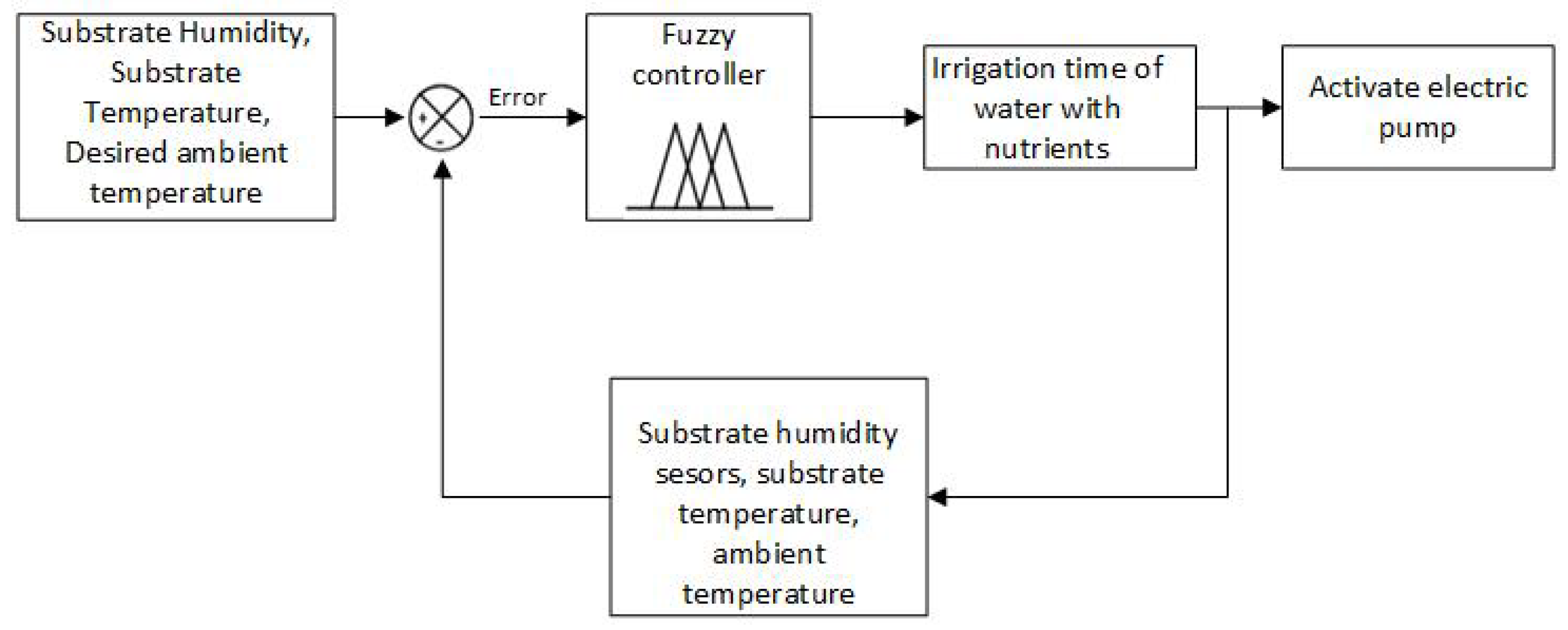
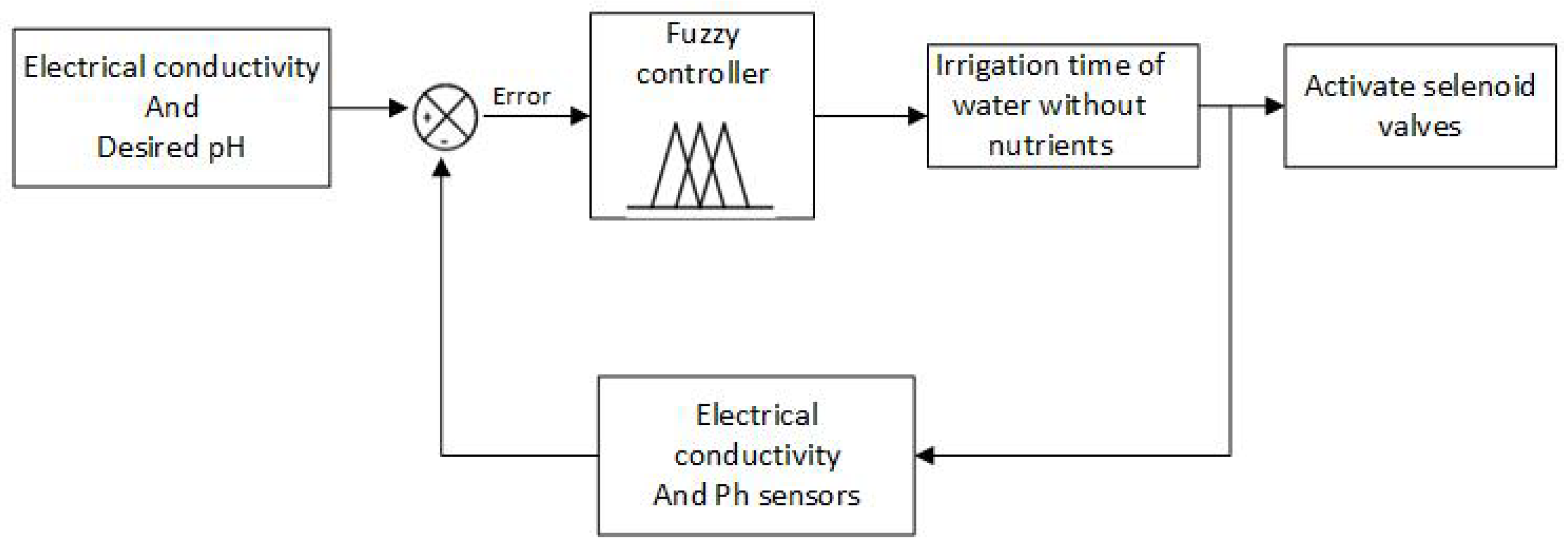
2.3. Fuzzy Control
3. Experimentation, Analysis of Results, and Advantages of the Proposal
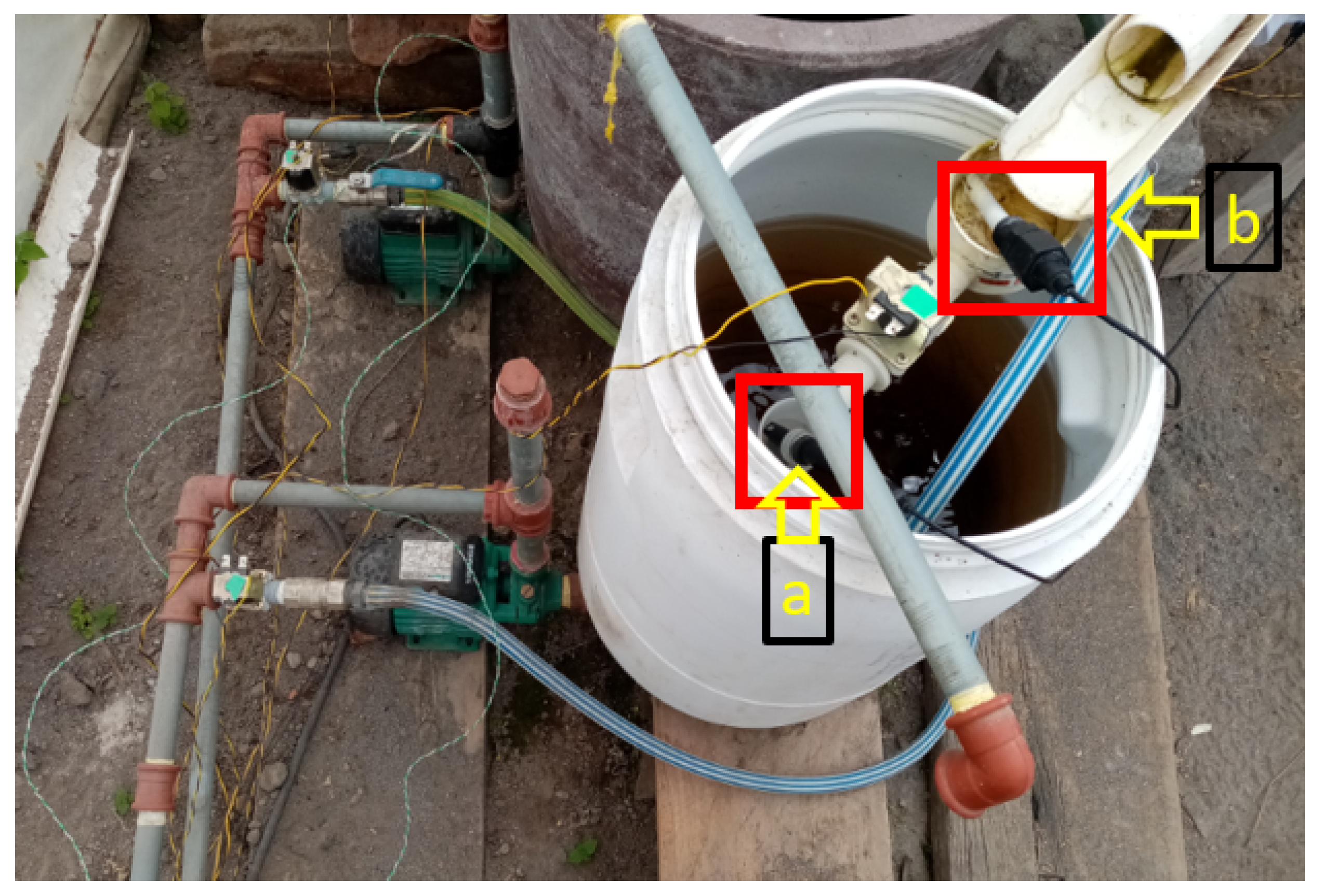
3.1. Greenhouse and Irrigation System
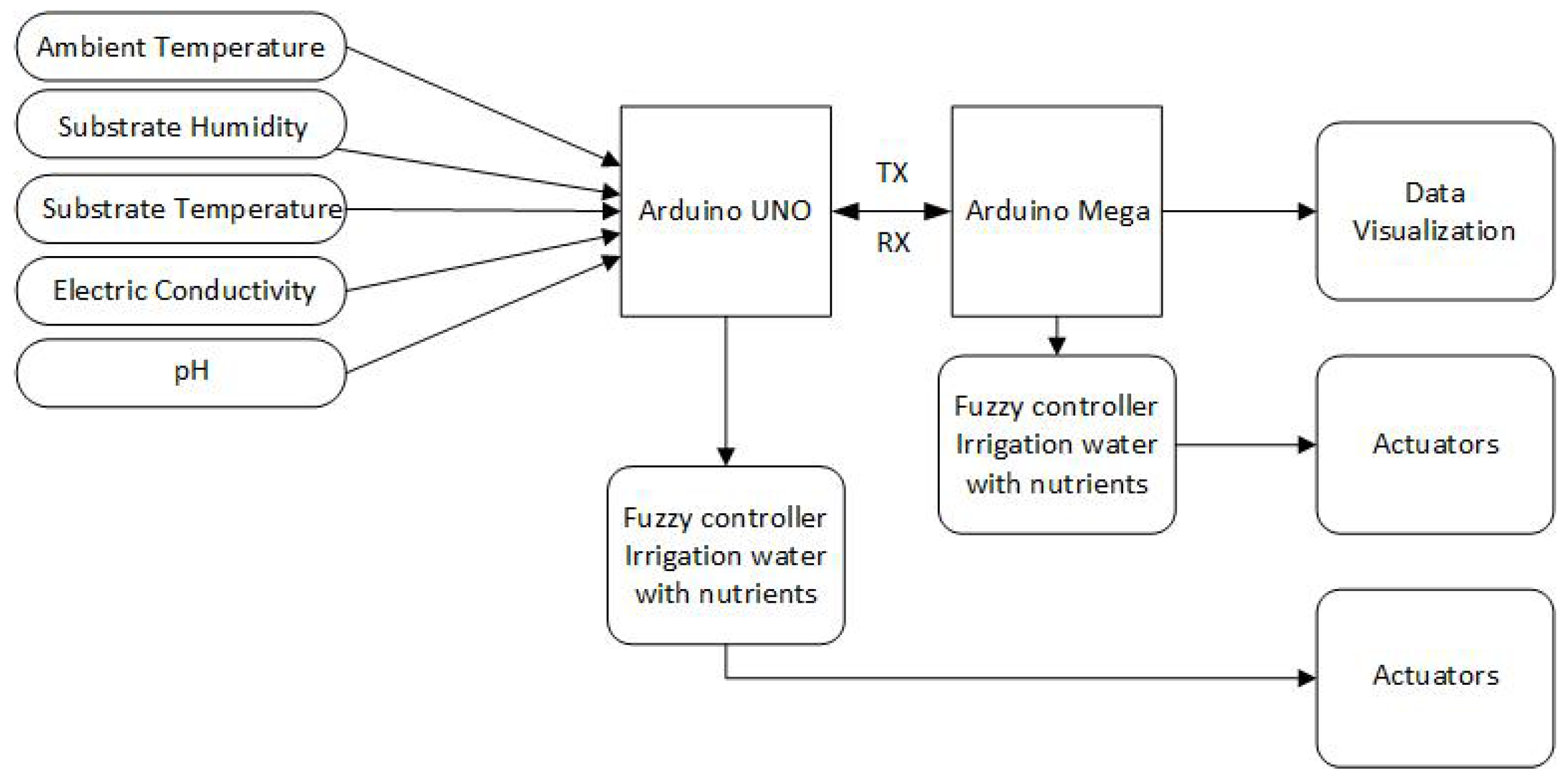
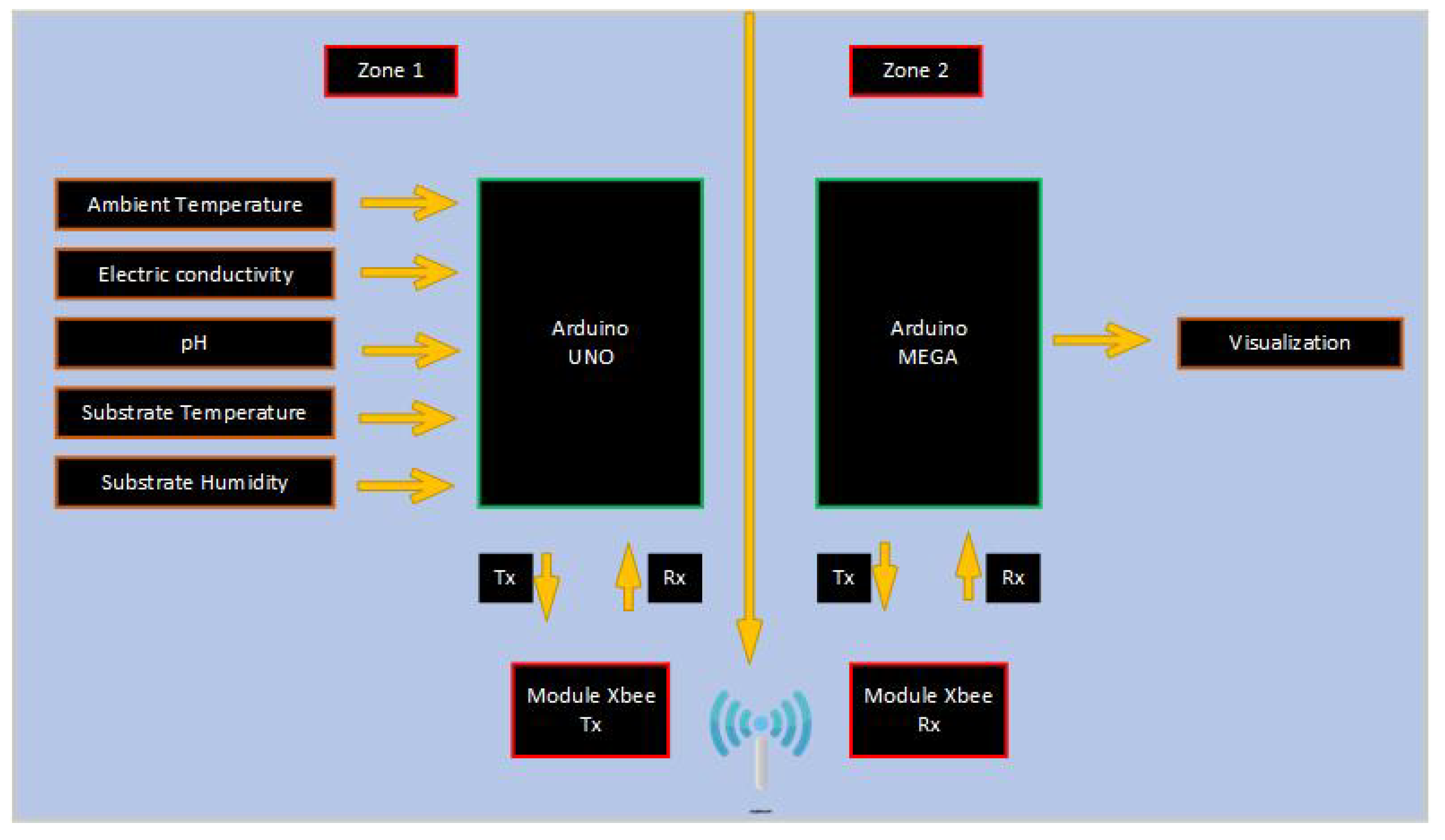
3.2. Data Acquisition and Transmission System
Sensors
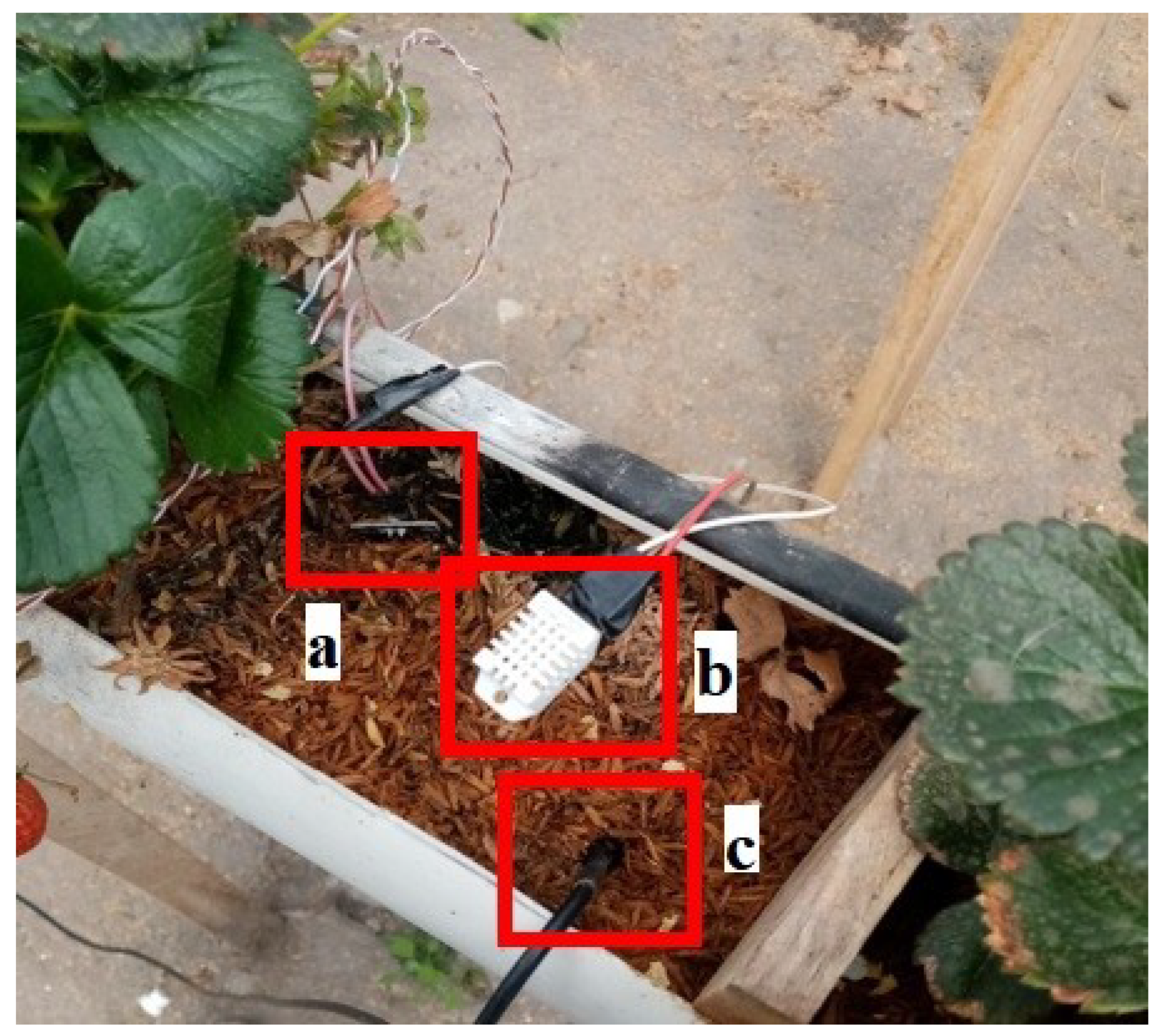
- The ambient temperature sensor used was the DHT22, which has a measuring range of 40 C to 80 C, with a rank of precision of ±0.5 C.
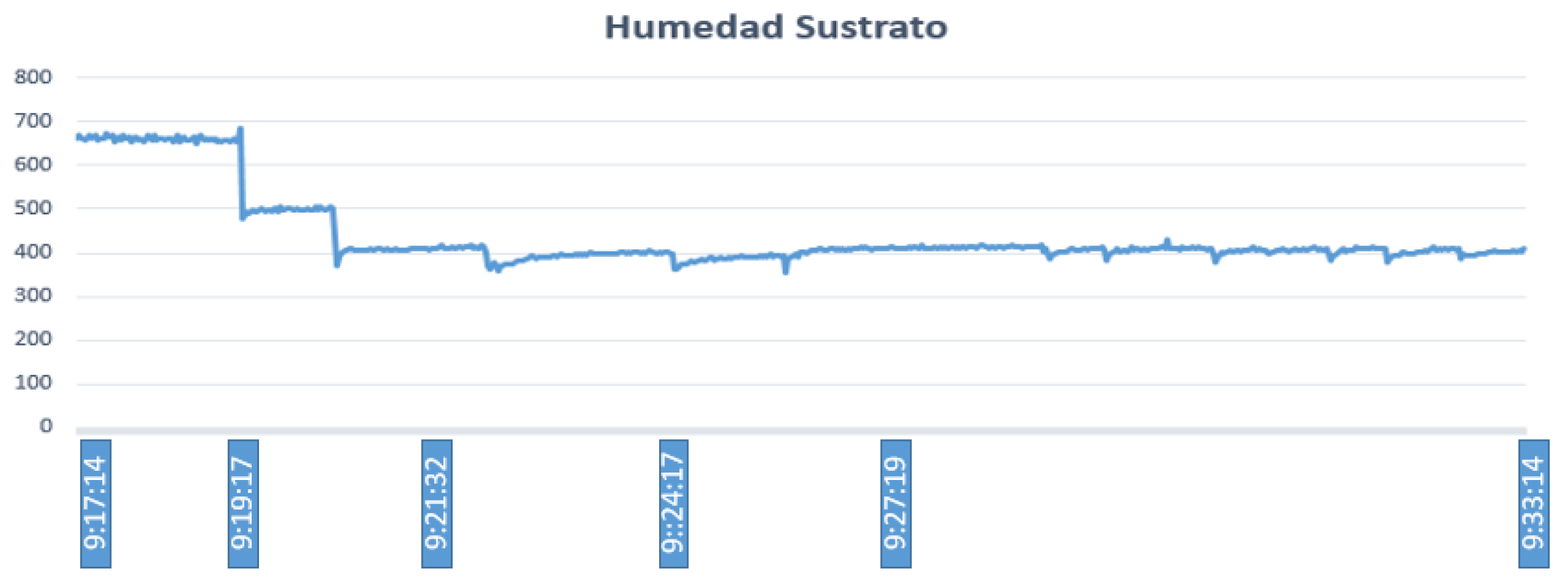
- For the humidity measurement of the substrate, a capacitive-type humidity sensor SKU SEN0193 was used, which has corrosion resistance characteristics and is compatible with Arduino.
- The ds18b20 sensor was used to measure the temperature of the substrate, as it highlights characteristics such as its small size (6 mm in diameter, 3 cm long) and low energy consumption.
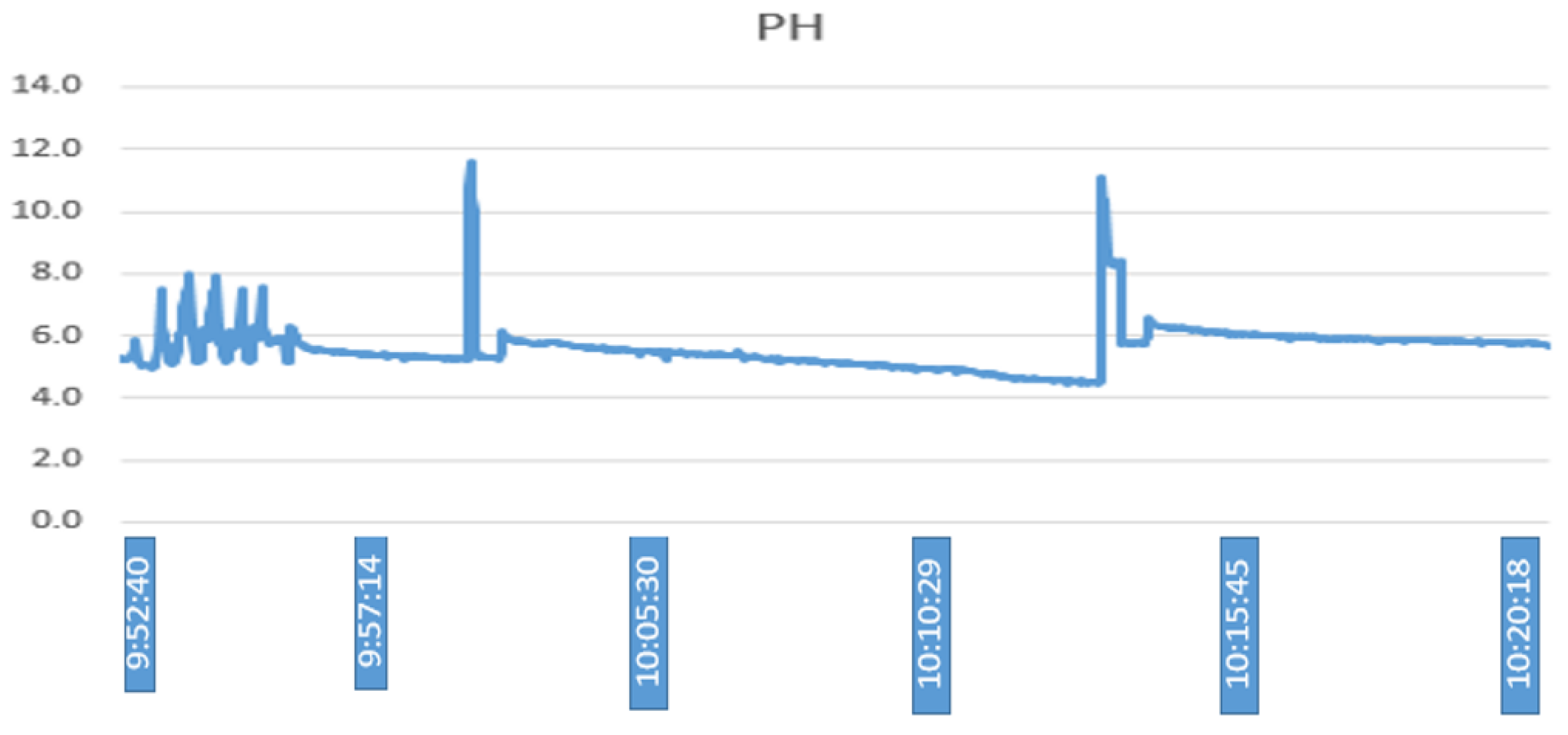
- The pH sensor used was the Atlas Scientific Lab Grade pH Probe, whose accuracy is ±0.1 pH, and it can be continuously immersed in the nutrient solution.
- The sensor used to measure electrical conductivity was the a1003v1 model, which can be submerged the entire time by continuously making measurements.
3.3. Control System
3.3.1. Fuzzy Sets
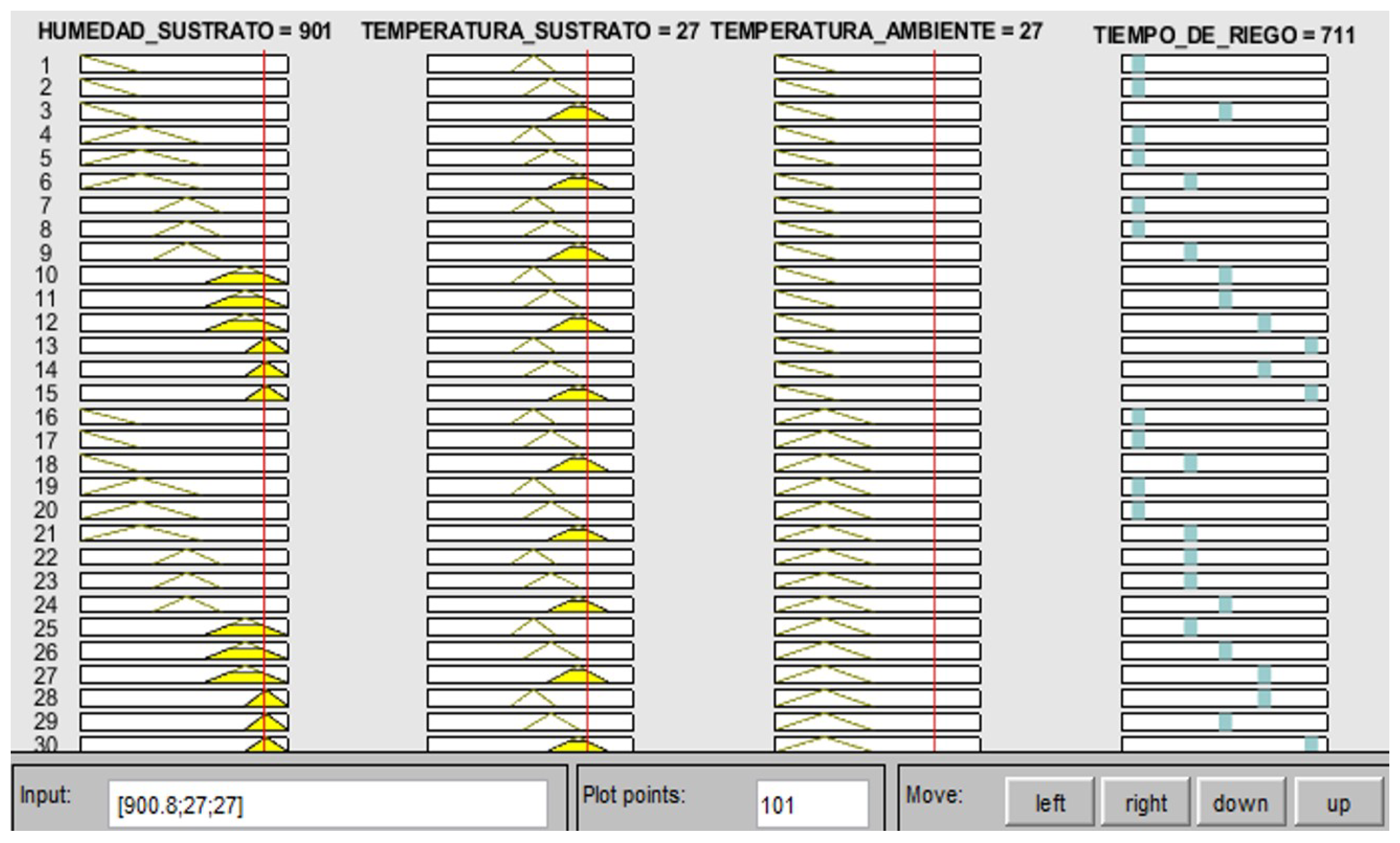
3.3.2. Fuzzy Rules
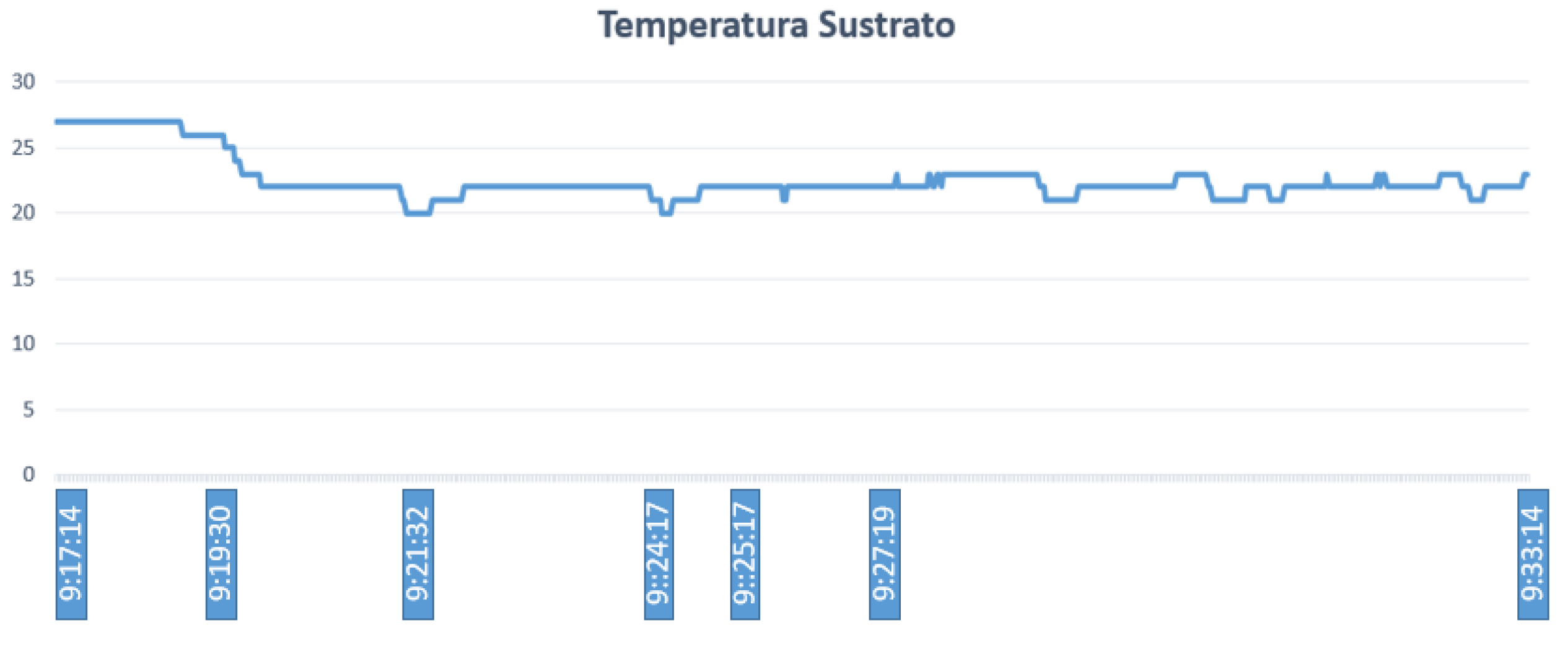
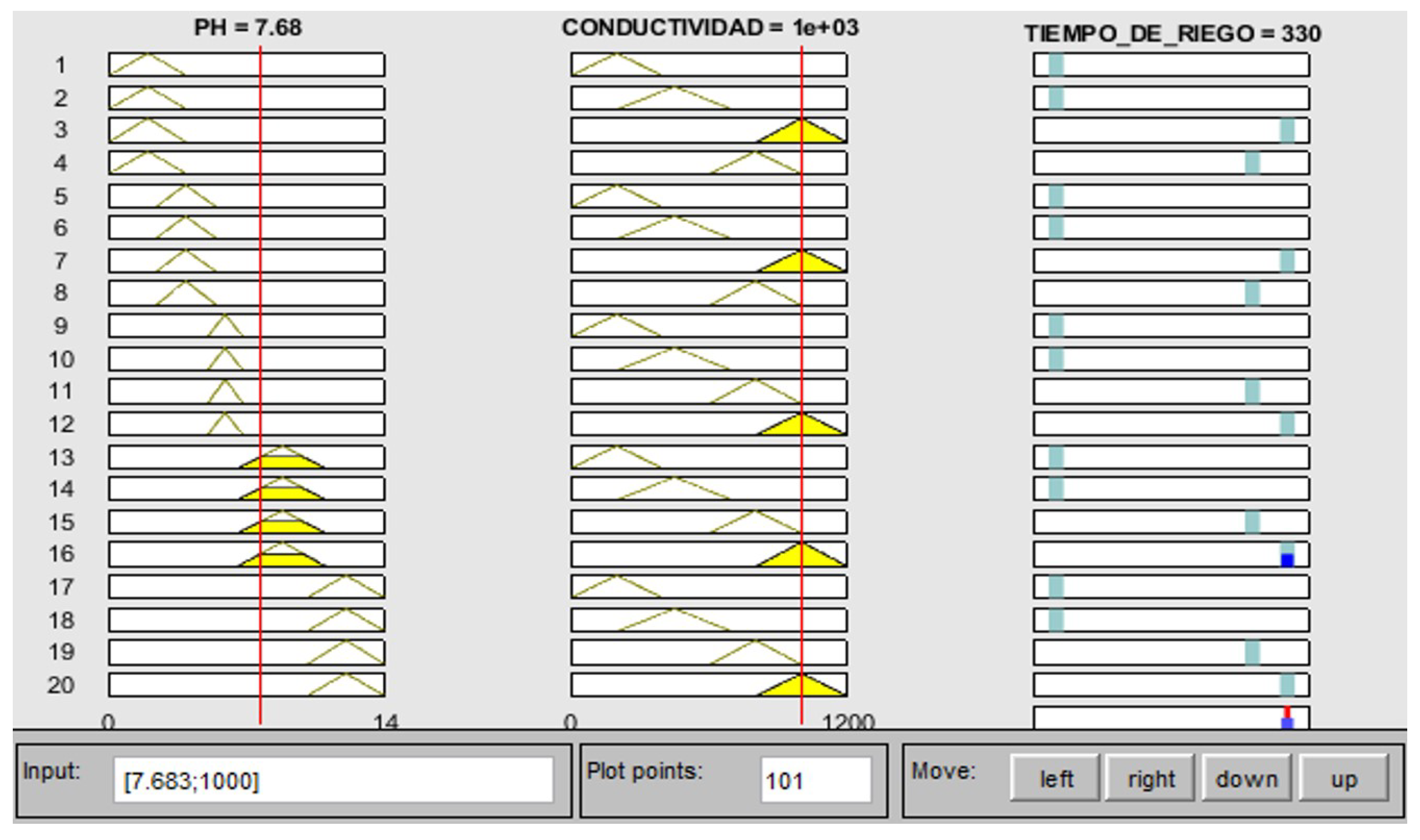
3.3.3. Controller Test
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

Appendix B

References
- Savvaz, D. Hydroponics: A Modern Technology Supporting the Application of Integrated Crop Management in Greenhouses. 2003. Available online: https://agris.fao.org/agris-search/search.do?recordID=FI2016100234 (accessed on 5 January 2023).
- Beltrano, J.; Gimenez, D.O. Hydroponics Cultivation; Editorial de la Universidad Nacional de La Plata (EDULP) 2015. Available online: https://libros.unlp.edu.ar/index.php/unlp/catalog/view/414/381/1316-1 (accessed on 5 January 2023).
- Khan, F.A. A review on hydroponic greenhouse cultivation for sustainable agriculture. Int. J. Agric. Environ. Food Sci. 2018, 2, 59–66. [Google Scholar] [CrossRef]
- Hassan, S.I.; Alam, M.M.; Illahi, U.; Al Ghamdi, M.A.; Almotiri, S.H. and Su’ud, M.M. A systematic review on monitoring and advanced control strategies in smart agriculture. IEEE Access 2021, 9, 32517–32548. [Google Scholar] [CrossRef]
- Lakhiar, I.A.; Jianmin, G.; Syed, T.N.; Chandio, F.A.; Buttar, N.A.; Qureshi, W.A. Monitoring and control systems in agriculture using intelligent sensor techniques: A review of the aeroponic system. J. Sens. 2018, 2018, 8672769. [Google Scholar] [CrossRef]
- Dubey, S.; Pandey, R.; Gautam, S. Literature review on fuzzy expert system in agriculture. Int. J. Soft Comput. Eng. 2013, 2, 289–291. [Google Scholar]
- Ali, R.; Bouadila, S.; Mami, A. Development of a fuzzy logic controller applied to an agricultural greenhouse experimentally validated. Appl. Therm. Eng. 2018, 141, 798–810. [Google Scholar]
- Urbieta Parrazales, R.; Zagaceta Álvarez, M.T.; Aguilar Cruz, K.A.; Palma Orozco, R.; Fernández Muñoz, J.L. Implementation of a Fuzzy Logic Controller for the Irrigation of Rose Cultivation in Mexico. Agriculture 2021, 11, 576. [Google Scholar] [CrossRef]
- Chen, C.H.; Jeng, S.Y.; Lin, C.J. Fuzzy Logic Controller for Automating Electrical Conductivity and pH in Hydroponic Cultivation. Appl. Sci. 2022, 12, 405. [Google Scholar] [CrossRef]
- Phasinam, K.; Kassanuk, T.; Shinde, P.P.; Thakar, C.M.; Sharma, D.K.; Mohiddin, M.K.; Rahmani, A.W. Application of IoT and Cloud Computing in Automation of Agriculture Irrigation. J. Food Qual. 2022, 2022, 8285969. [Google Scholar] [CrossRef]
- Saputra, D.I.; Ismail, N.; Gumilang, F.; Najmurrokhman, A.; Hakim, M.T.A. Design and Implementation of RTOS on Multivariable Control of Urban Farming Hydroponic Fertilizer based on Fuzzy Logic. In Proceedings of the 2022 8th International Conference on Wireless and Telematics (ICWT), Yogyakarta, Indonesia, 21–22 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Samaranayake, S.L.; Krishmal, S.; Cooray, P.L.R.K.; Senatilaka, T.; Rajapaksha, S.; Nuwanthika, W.S. Autonomous Hydroponic Environment with Live Remote Consulting System for Strawberry Farming. In Proceedings of the 2022 4th International Conference on Advancements in Computing (ICAC), Colombo, Sri Lanka, 9–10 December 2022; pp. 54–59. [Google Scholar] [CrossRef]
- Triantino, S.B.; Mulwinda, A.; Hangga, A.; Utomo, A.B.; Salim, N.A.; Nisa, A.M. Control System of Nutrient Solution pH Using Fuzzy Logic for Hydroponics System. In Proceedings of the 2022 9th International Conference on Information Technology, Computer, and Electrical Engineering (ICITACEE), Semarang, Indonesia, 25–26 August 2022; pp. 71–75. [Google Scholar] [CrossRef]
- Casillas-Romero, S.A.; Begovich, O. Monitoring and pH regulation in urban hydroponic systems. In Proceedings of the 2021 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 10–12 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Serrano Cermeño, Z. Construction of Greenhouses. Mundi-Prensa Libros. 2005. Available online: http://catalogo.infoagro.hn/cgi-bin/koha/opac-detail.pl?biblionumber=12748 (accessed on 5 January 2023).
- Savvas, D.; Gruda, N. Application of soilless culture technologies in the modern greenhouse industry—A review. Eur. J. Hortic. Sci. 2018, 83, 280–293. [Google Scholar] [CrossRef]
- Lorenzo, P. Greenhouse Cultivation and Its Relationship with the Climate; Cuadernos de Estudios Agroalimentarios (CEA): Almería, Spain, 2012; pp. 23–44. Available online: https://www.publicacionescajamar.es/publicacionescajamar/public/pdf/publicaciones-periodicas/cuadernos-de-estudios-agroalimentarios-cea/3/3-536.pdf (accessed on 5 January 2023).
- Sardare, M.D.; Admane, S.V. A review on plant without soil- hydroponics. Int. J. Res. Eng. Technol. 2013, 2, 299–304. [Google Scholar]
- George, P.; George, N. Hydroponics-(soilless cultivation of plants) for biodiversity conservation. Int. J. Mod. Trends Eng. Sci. 2016, 3, 97–104. [Google Scholar]
- Singh, S.; Singh, B. Hydroponics—A technique for cultivation of vegetables and medicinal plants. In Proceedings of the 4th Global Conference on Horticulture for Food, Nutrition and Livelihood Options, Bhubaneshwar, Odisha, India, 28–31 May 2012; p. 220. [Google Scholar]
- Montoya, R.H.; Chaves, G.M. Influence of temperature and light on germination, infectivity and generation period of hemileia vastatrix berk et Br. Experientiae 1981, 18, 239–266. [Google Scholar]
- Sanchez-Guerrero, M.; Lorenzo, P.; Fernandez, P.; Mendrano, E. Uso de Sensores de Clima en Cultivos bajo Invernadero. 2020. Available online: https://www.juntadeandalucia.es/agriculturaypesca/ifapa/servifapa/registro-servifapa/41f6a9a8-4717-4a99-806b-5b79c6006694/download (accessed on 5 January 2023).
- Bhadani, P.; Vashisht, V. Soil moisture, temperature and humidity measurement using arduino. In Proceedings of the 2019 9th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 10–11 January 2019; pp. 567–571. [Google Scholar]
- Solé, A.C. Industrial Instrumentation. Octava Edicion; Marcombo, SA: Barcelona, Spain, 2011; ISBN 978-84-267-1668-2. [Google Scholar]
- Barbaro, L.; Karlanian, M.; Mata, D. Importance of PH and Electrical Conductivity (CE) in Plant Substrates; Presidency of the Nation, Ministry of Agriculture, Livestock and Fisheries, National Institute of Agricultural Technology (INTA): Buenos Aires, Argentina, 2014.
- Albertos Pérez, P.; Sala Piqueras, A. El control borroso: Una metodo- logía integradora. Rev. Iberoam. Automática Inf. Ind. 2010, 1, 22–31. [Google Scholar]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1996; ISBN 978-3-540-60691-8. [Google Scholar] [CrossRef]
- Wolkenhauer, O. A course in fuzzy systems and control. Int. J. Electr. Eng. Educ. 1997, 34, 282. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Very Cold | Cold | Temperate | Hot | Very Hot | |
|---|---|---|---|---|---|
| Range [0–32] | [0,11] | [0,17] | [12,20] | [17,27] | [23,32] |
| Semi-Optimal | Optimal | Hot | |
|---|---|---|---|
| Range [0–31] | [14,22] | [16,26] | [20,31] |
| Too Moist | Very Moist | Moist | Dry | Very Dry | |
|---|---|---|---|---|---|
| Rank (0–1024) | [0,300] | [300,600] | [350,700] | [600,1024] | [800,1024] |
| Little Saline | Moderate Saline | Saline | Too Much Saline | |
|---|---|---|---|---|
| Rank (0–1000) | [0,400] | [200,700] | [600,1000] | [800,1200] |
| Very Acidic | Acidic | Normal | Alkaline | Very Alkaline | |
|---|---|---|---|---|---|
| Range (0–14) | [0,4] | [2.4,5.5] | [5,6.8] | [6.5,11] | [10,14] |
| Irrigate Nothing | Irrigate Little | Irrigate Middle | Irrigate Much | Irrigate Too Much | |
|---|---|---|---|---|---|
| Controller 1 Range (0–796) | [0] | [0,240] | [0,400] | [0,580] | [0,796] |
| Controller 2 Range (0–330) | [0] | [0,120] | [0,180] | [0,280] | [0,330] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maya Olalla, E.; Lopez Flores, A.; Zambrano, M.; Domínguez Limaico, M.; Diaz Iza, H.; Vasquez Ayala, C. Fuzzy Control Application to an Irrigation System of Hydroponic Crops under Greenhouse: Case Cultivation of Strawberries (Fragaria Vesca). Sensors 2023, 23, 4088. https://doi.org/10.3390/s23084088
Maya Olalla E, Lopez Flores A, Zambrano M, Domínguez Limaico M, Diaz Iza H, Vasquez Ayala C. Fuzzy Control Application to an Irrigation System of Hydroponic Crops under Greenhouse: Case Cultivation of Strawberries (Fragaria Vesca). Sensors. 2023; 23(8):4088. https://doi.org/10.3390/s23084088
Chicago/Turabian StyleMaya Olalla, Edgar, Andres Lopez Flores, Marcelo Zambrano, Mauricio Domínguez Limaico, Henry Diaz Iza, and Carlos Vasquez Ayala. 2023. "Fuzzy Control Application to an Irrigation System of Hydroponic Crops under Greenhouse: Case Cultivation of Strawberries (Fragaria Vesca)" Sensors 23, no. 8: 4088. https://doi.org/10.3390/s23084088
APA StyleMaya Olalla, E., Lopez Flores, A., Zambrano, M., Domínguez Limaico, M., Diaz Iza, H., & Vasquez Ayala, C. (2023). Fuzzy Control Application to an Irrigation System of Hydroponic Crops under Greenhouse: Case Cultivation of Strawberries (Fragaria Vesca). Sensors, 23(8), 4088. https://doi.org/10.3390/s23084088