
Performance of Active-Quenching SPAD Array Based on the Tri-State Gates of FPGA and Packaged with Bare Chip Stacking

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
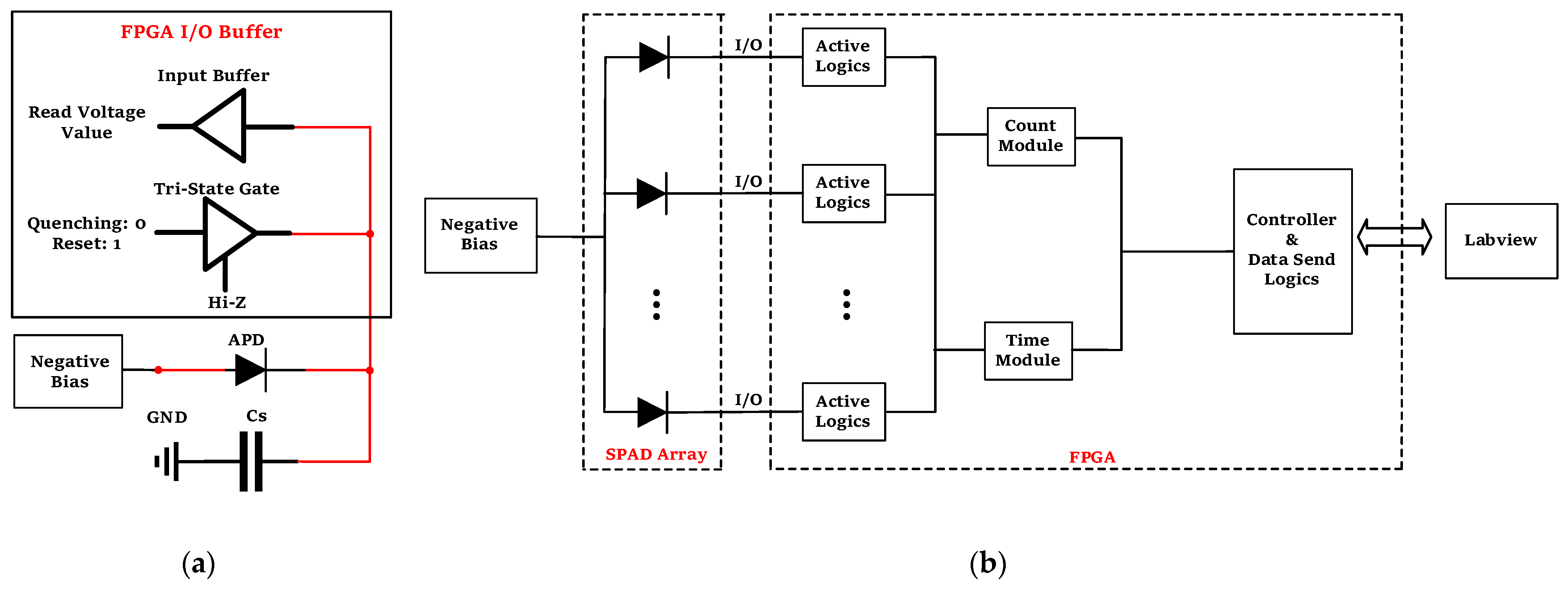
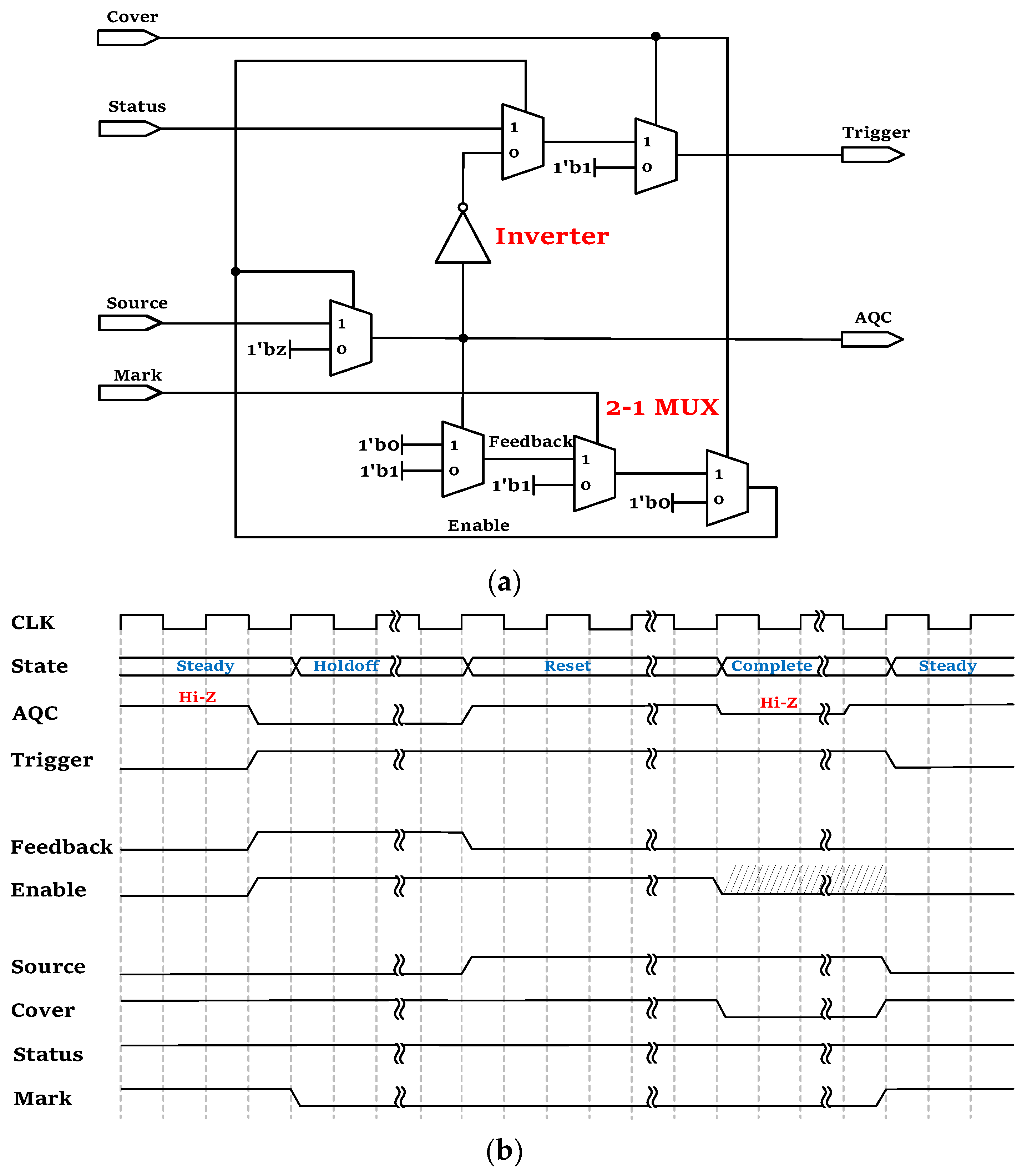
2. Operation Mechanism
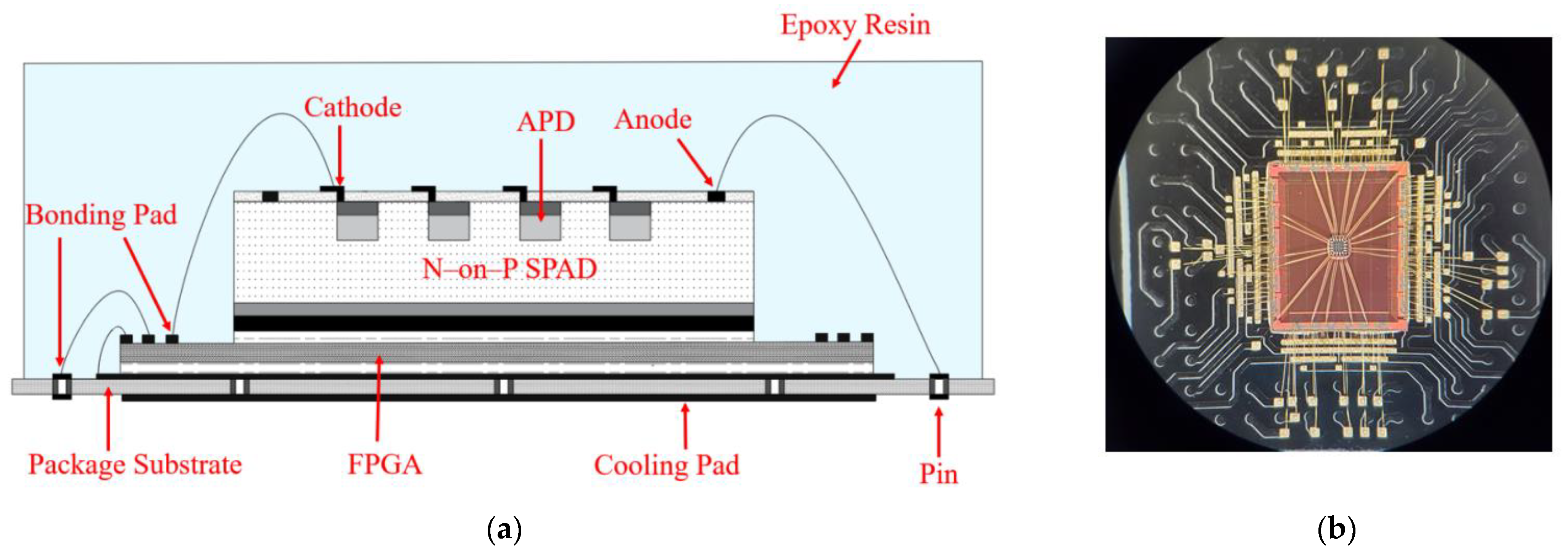
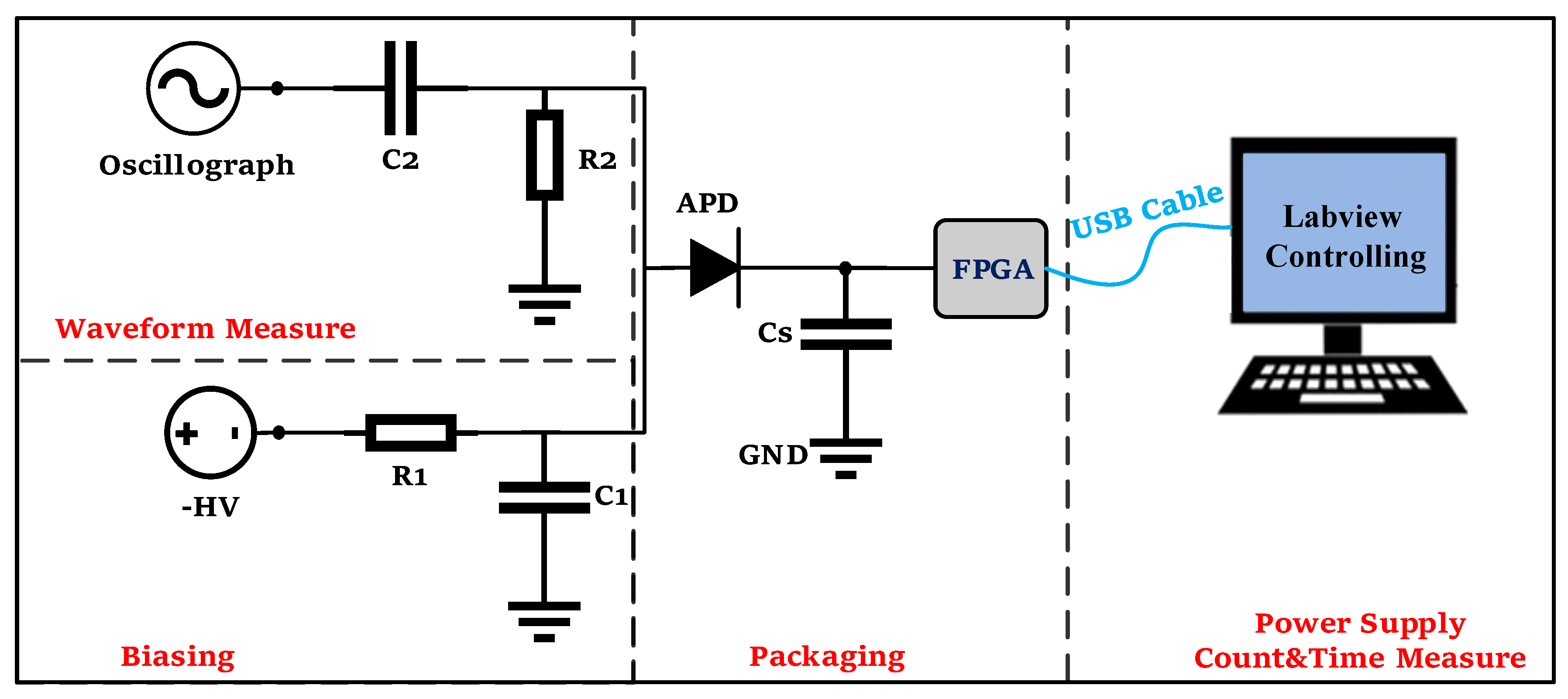
3. Implementation Method
4. Results and Discussion
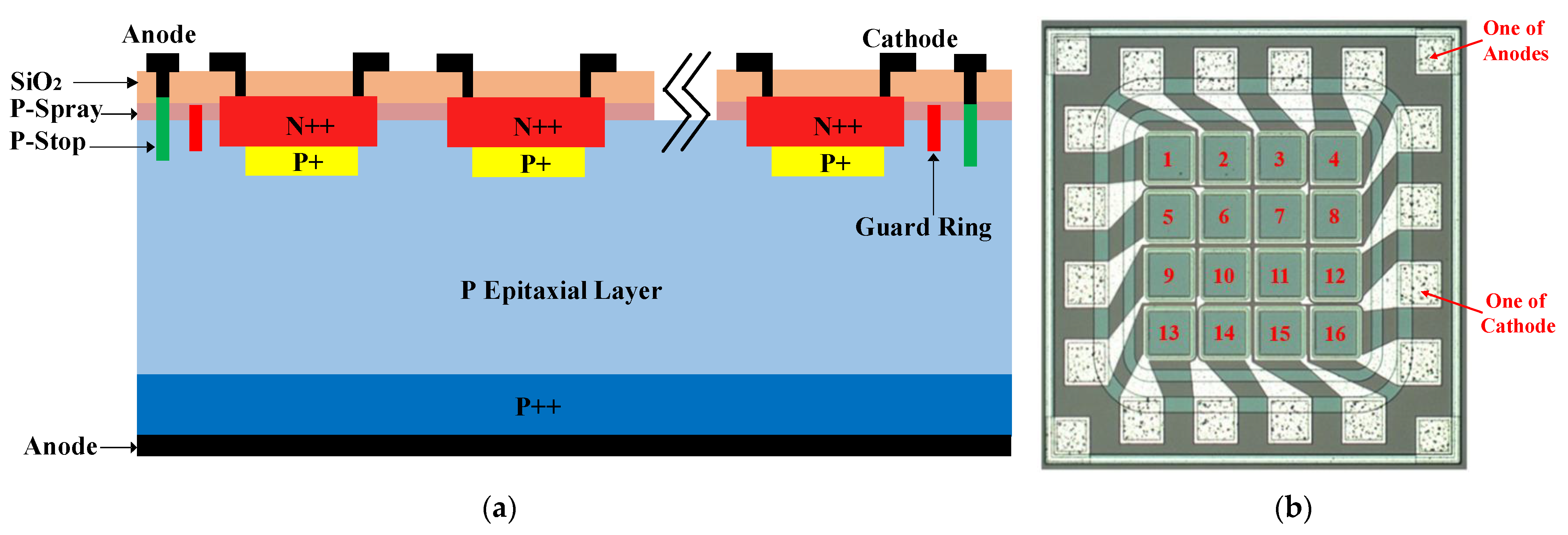
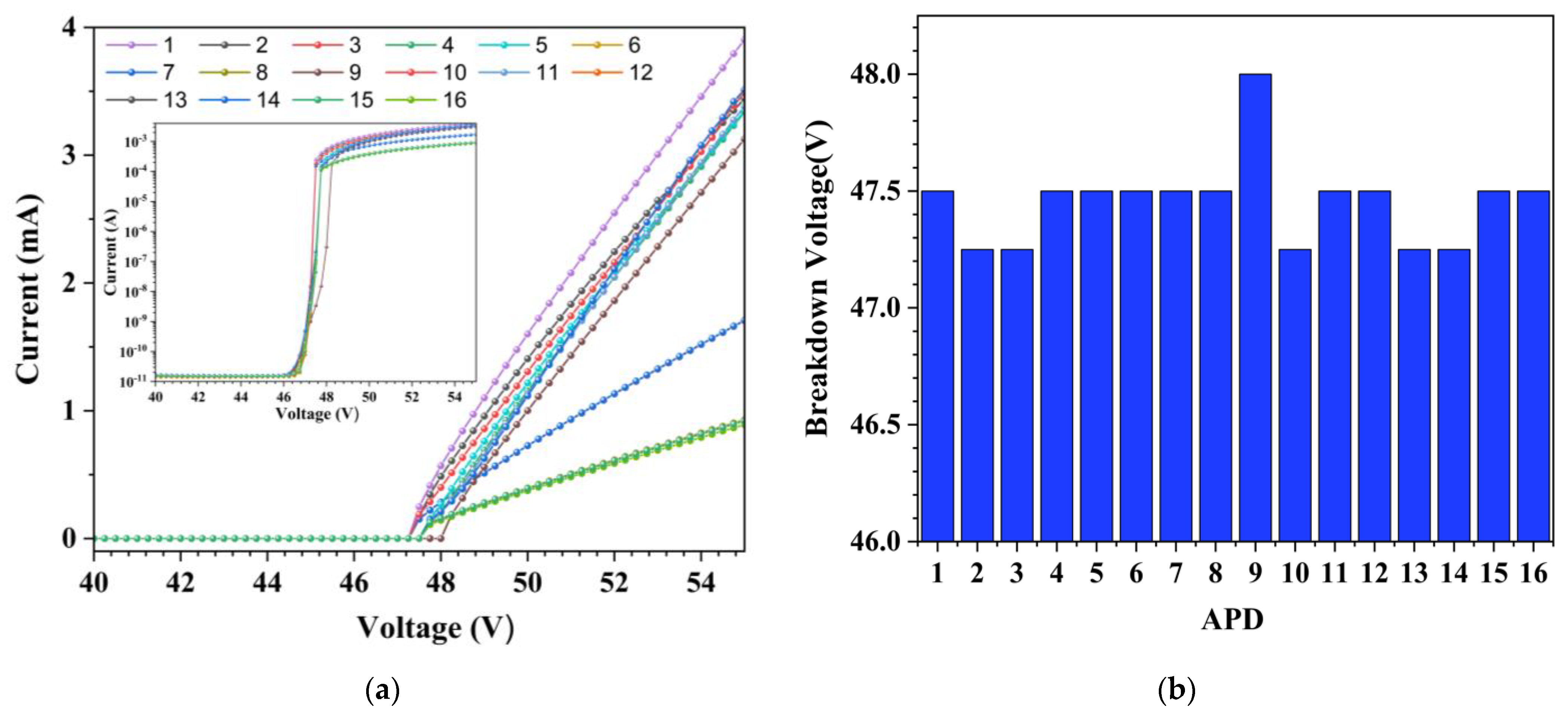
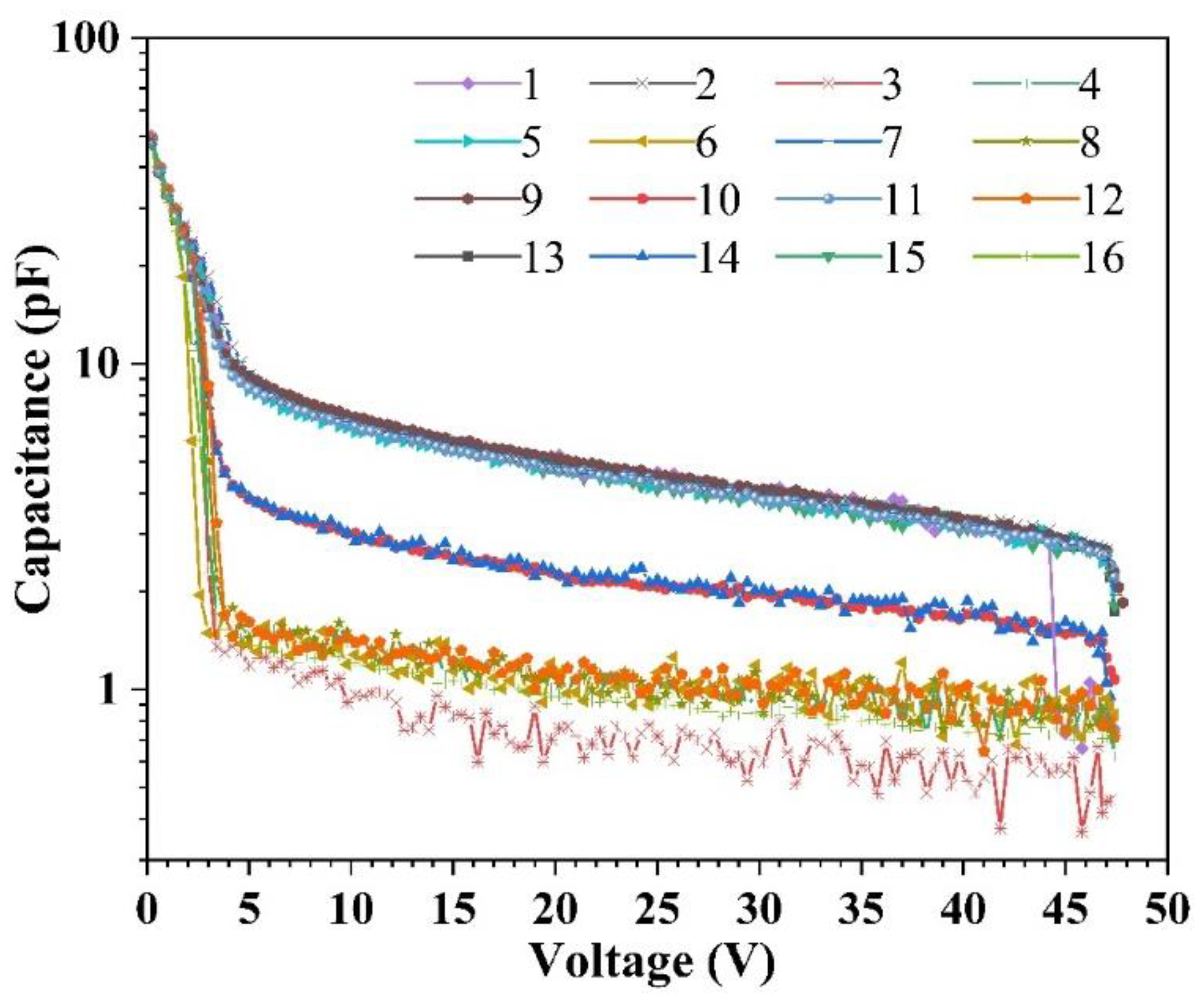
4.1. Characterization of the Static Properties
4.2. Characterization of Dynamic Properties
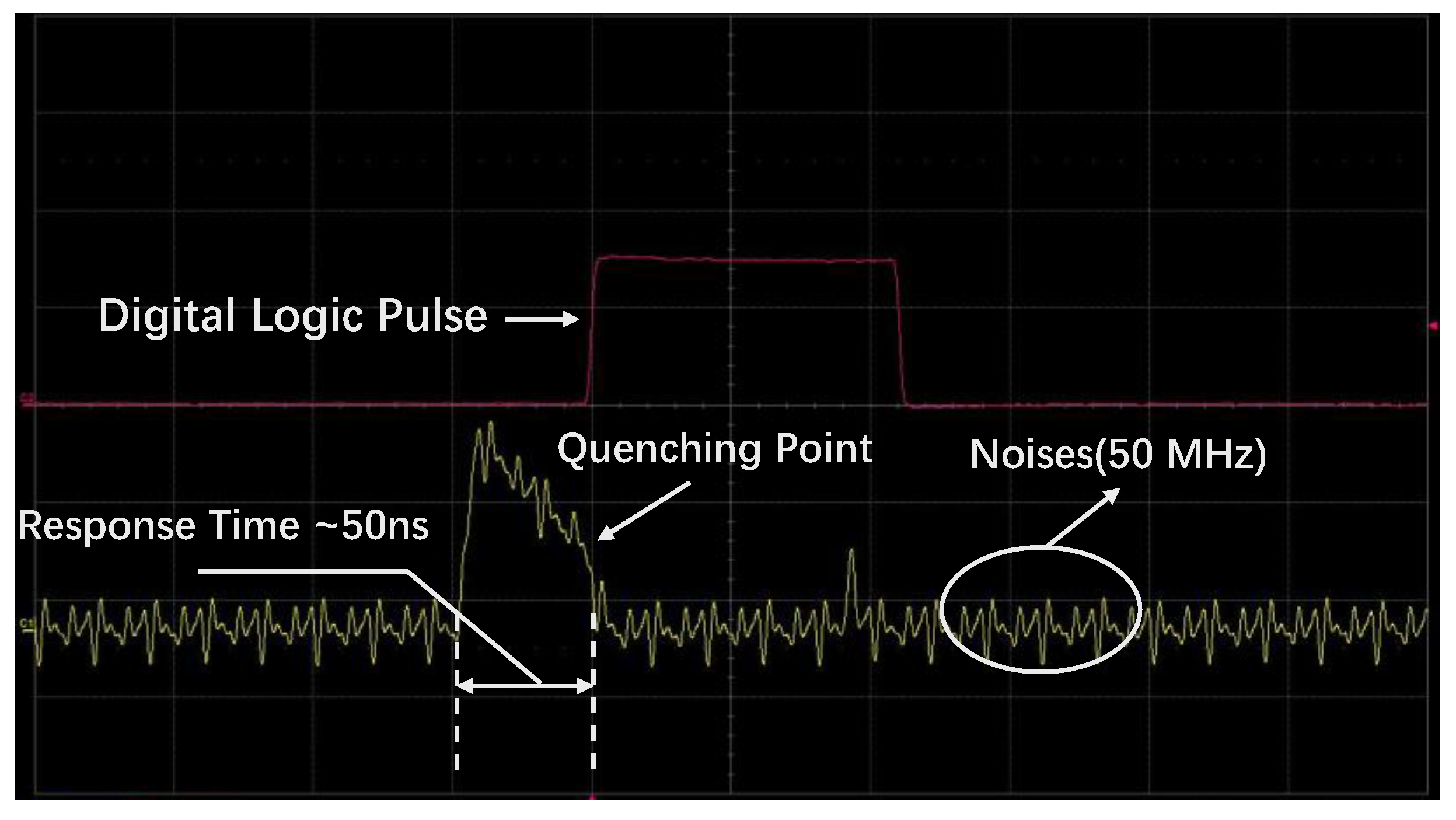
4.2.1. Waveform
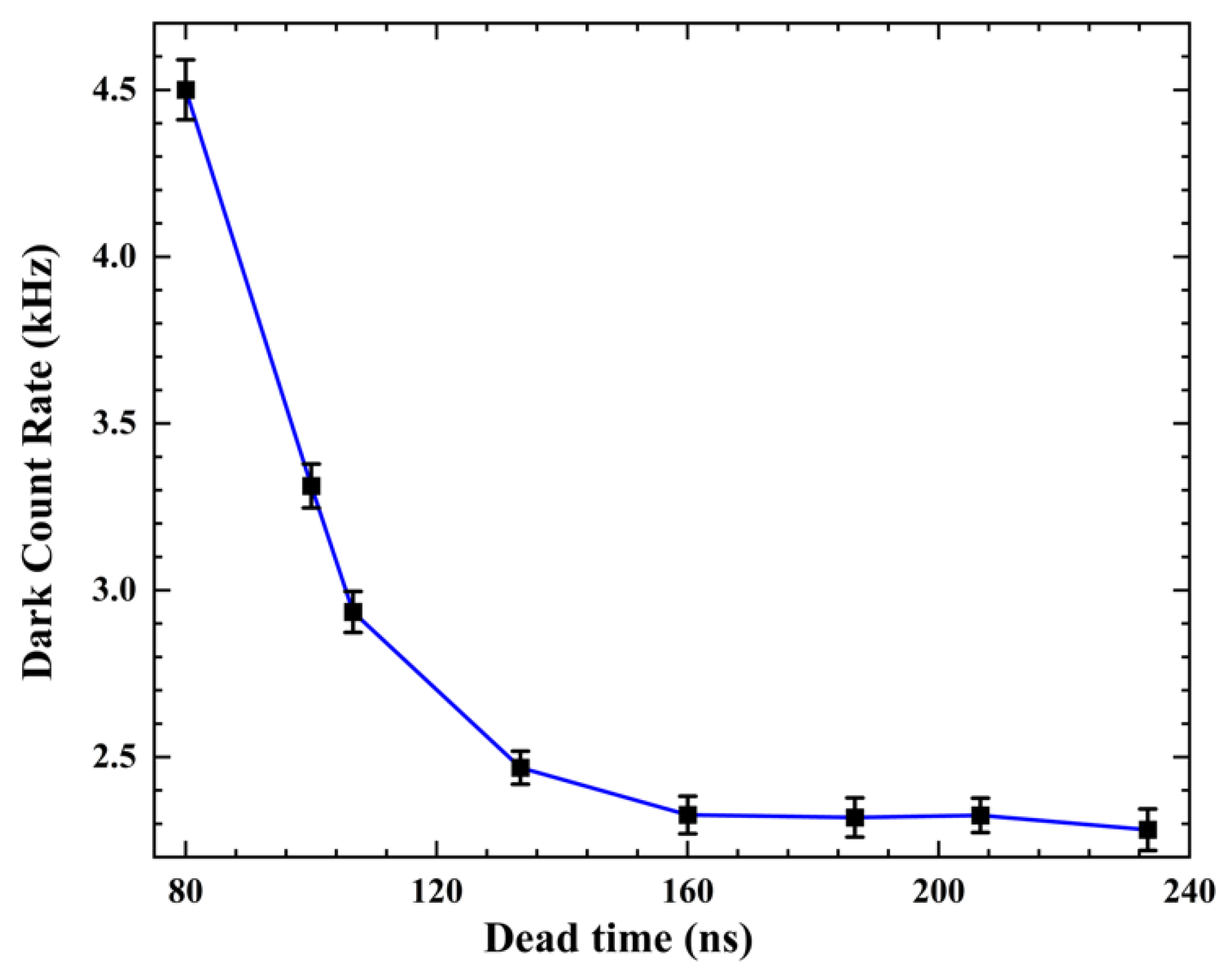
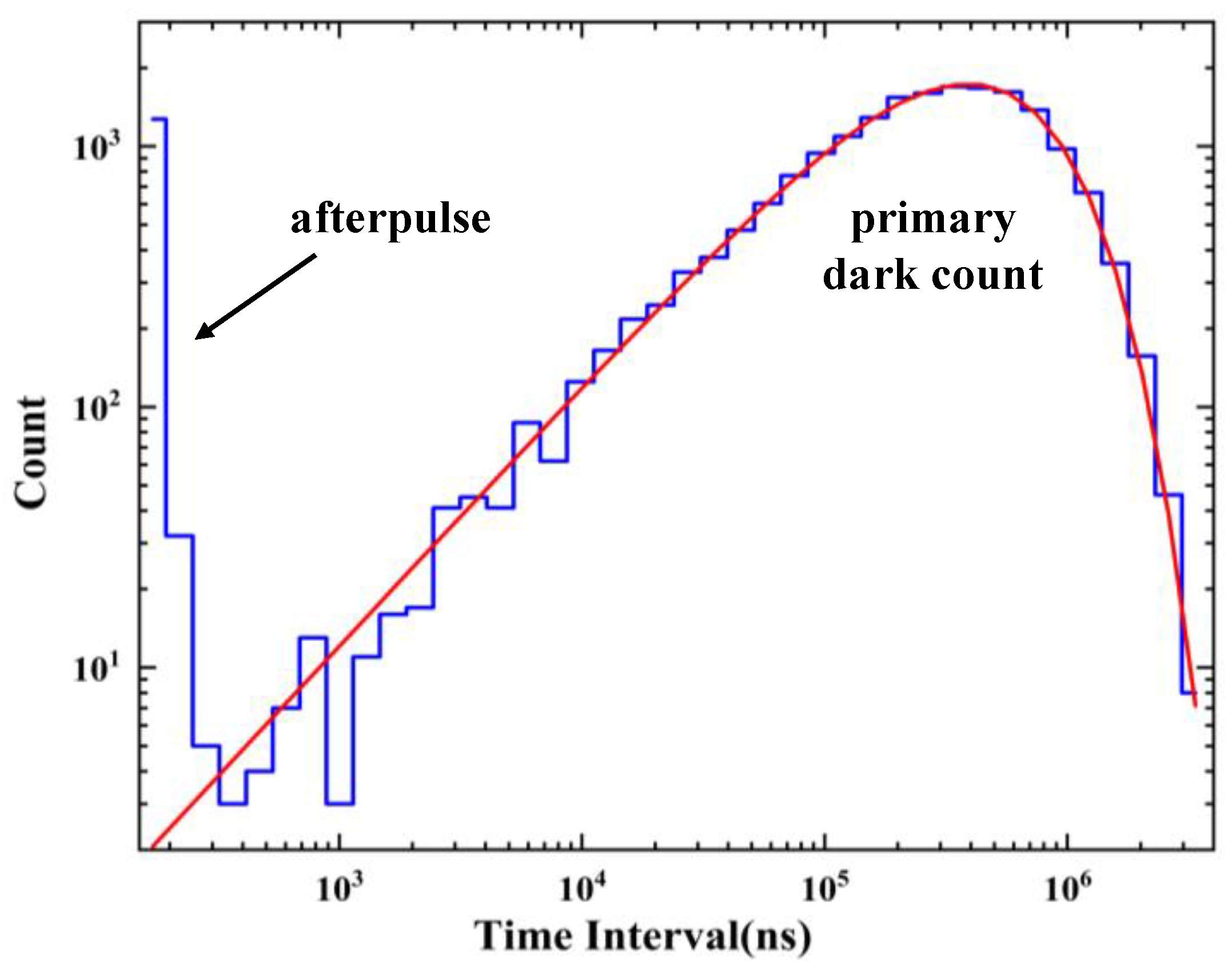
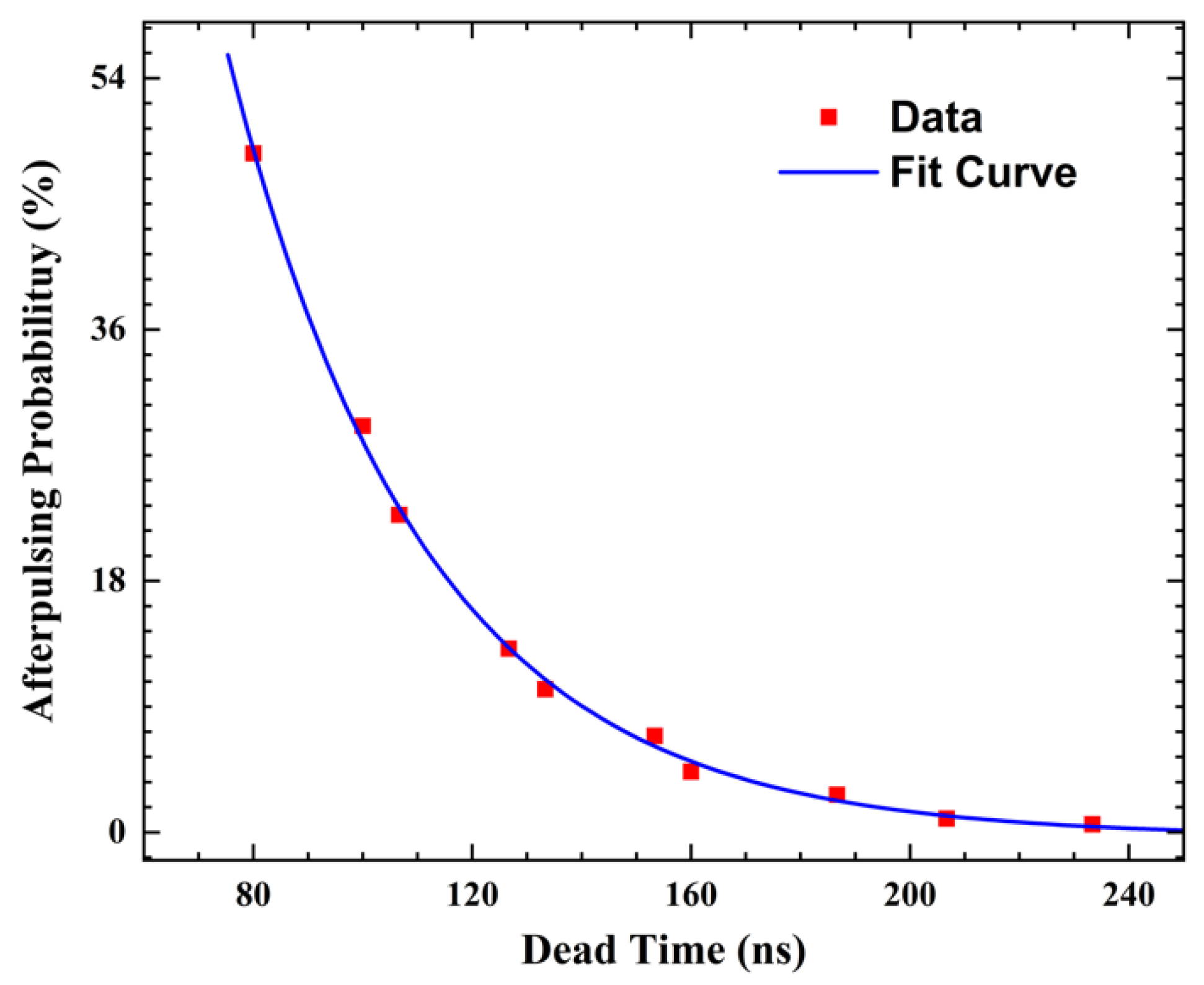
4.2.2. Dark Count and Afterpulse Probability
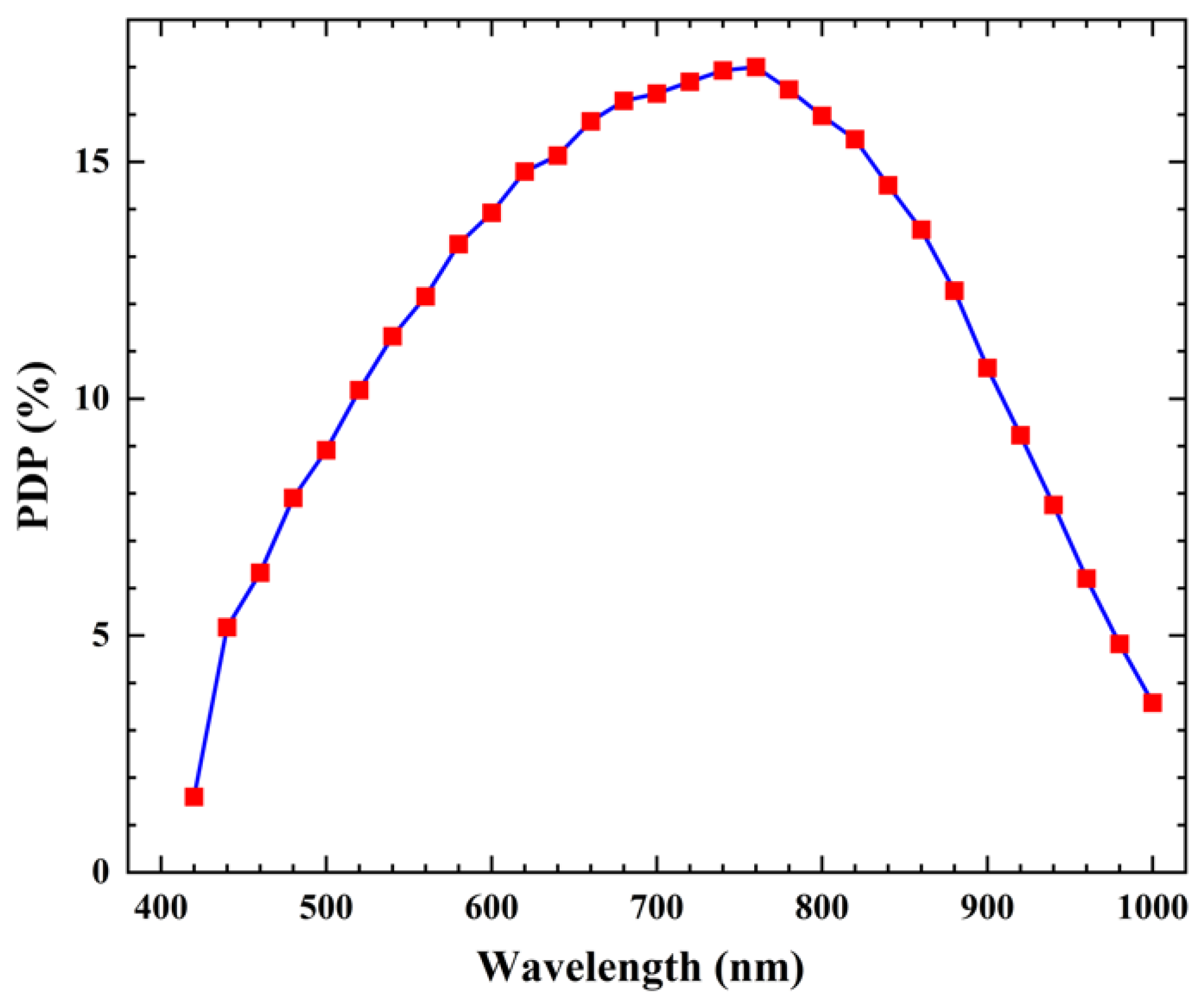
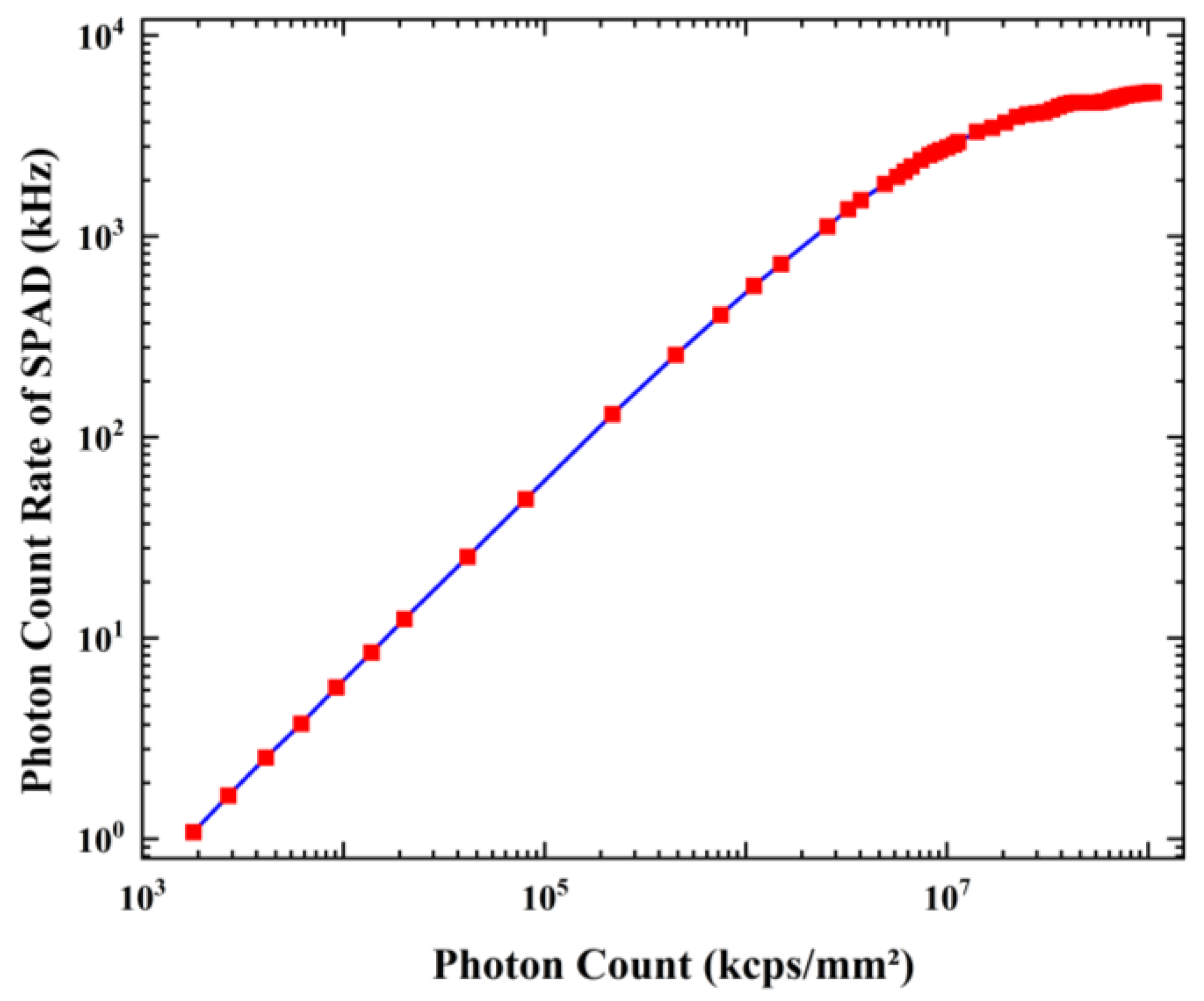
4.2.3. Photon Detection Probability and Linear Response Dynamic Range
5. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bruschini, C.; Homulle, H.; Antolovic, I.M.; Burri, S.; Charbon, E. Single-photon avalanche diode imagers in biophotonics: Review and outlook. Light Sci. Appl. 2019, 8, 87. [Google Scholar] [CrossRef] [PubMed]
- Renker, D. Geiger-mode avalanche photodiodes, history, properties and problems. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2006, 567, 48–56. [Google Scholar] [CrossRef]
- Colyer, R.A.; Scalia, G.; Rech, I.; Gulinatti, A.; Ghioni, M.; Cova, S.; Weiss, S.; Michalet, X. High-throughput FCS using an LCOS spatial light modulator and an 8× 1 SPAD array. Biomed. Opt. Express 2010, 1, 1408–1431. [Google Scholar] [CrossRef] [PubMed]
- Cova, S.; Ghioni, M.; Lacaita, A.; Samori, C.; Zappa, F. Avalanche photodiodes and quenching circuits for single-photon detection. Appl. Opt. 1996, 35, 1956–1976. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.; Charbon, E. Progress in single-photon avalanche diode image sensors in standard CMOS: From two-dimensional monolithic to three-dimensional-stacked technology. Jpn. J. Appl. Phys. 2018, 57, 1002A–1003A. [Google Scholar] [CrossRef]
- Frach, T.; Prescher, G.; Degenhardt, C.; De Gruyter, R.; Schmitz, A.; Ballizany, R. The digital silicon photomultiplier—Principle of operation and intrinsic detector performance. In 2009 IEEE Nuclear Science Symposium Conference Record (NSS/MIC); IEEE: New York, NY, USA, 2009; pp. 1959–1965. [Google Scholar]
- Aull, B. Geiger-mode avalanche photodiode arrays integrated to all-digital CMOS circuits. Sensors 2016, 16, 495. [Google Scholar] [CrossRef] [PubMed]
- Bruschini, C.; Burri, S.; Bernasconi, E.; Milanese, T.; Ulku, A.C.; Homulle, H.; Charbon, E. LinoSPAD2: A 512×1 linear SPAD camera with system-level 135-ps SPTR and a reconfigurable computational engine for time-resolved single-photon imaging. In Quantum Sensing and Nano Electronics and Photonics XIX; SPIE: Bellingham, DC, USA, 2023; pp. 126–135. [Google Scholar]
- Burri, S.; Bruschini, C.; Charbon, E. LinoSPAD: A compact linear SPAD camera system with 64 FPGA-based TDC modules for versatile 50 ps resolution time-resolved imaging. Instruments 2017, 1, 6. [Google Scholar] [CrossRef]
- Sachidananda, S.; Gundlapalli, P.; Leong, V.; Krivitsky, L.; Ling, A. Realizing a robust, reconfigurable active quenching design for multiple architectures of single-photon avalanche detectors. In Photonic Instrumentation Engineering IX; SPIE: Bellingham, DC, USA, 2022; pp. 54–61. [Google Scholar]
- Chen, W.; Bottoms, B. Heterogeneous integration roadmap: Driving force and enabling technology for systems of the future. In 2019 Symposium on VLSI Technology; IEEE: New York, NY, USA, 2019; pp. T50–T51. [Google Scholar]
- GW2A Series of FPGA Products Data Sheet. Available online: https://www.gowinsemi.com/upload/database_doc/1832/document/6426ad3a9c12b.pdf (accessed on 1 April 2023).
- Piemonte, C.; Ferri, A.; Gola, A.; Picciotto, A.; Pro, T.; Serra, N.; Tarolli, A.; Zorzi, N. Development of an automatic procedure for the characterization of silicon photomultipliers. In Proceedings of the 2012 IEEE Nuclear Science Symposium and Medical Imaging Conference Record (NSS/MIC), Anaheim, CA, USA, 29 October–3 November 2012; pp. 428–432. [Google Scholar]
- Zappalà, G.; Acerbi, F.; Ferri, A.; Gola, A.; Paternoster, G.; Zorzi, N.; Piemonte, C. Set-up and methods for SiPM Photo-Detection Efficiency measurements. J. Instrum. 2016, 11, P8014. [Google Scholar] [CrossRef]
- Du, Y.; Retiere, F. After-pulsing and cross-talk in multi-pixel photon counters. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2008, 596, 396–401. [Google Scholar] [CrossRef]
- Eckert, P.; Schultz-Coulon, H.; Shen, W.; Stamen, R.; Tadday, A. Characterisation studies of silicon photomultipliers. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2010, 620, 217–226. [Google Scholar] [CrossRef]
- Bonanno, G.; Finocchiaro, P.; Pappalardo, A.; Billotta, S.; Cosentino, L.; Belluso, M.; Di Mauro, S.; Occhipinti, G. Precision measurements of photon detection efficiency for SiPM detectors. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2009, 610, 93–97. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Lv, W.; Liu, J.; Zhang, X.; Liang, K.; Yang, R.; Han, D. Performance of Active-Quenching SPAD Array Based on the Tri-State Gates of FPGA and Packaged with Bare Chip Stacking. Sensors 2023, 23, 4314. https://doi.org/10.3390/s23094314
Liu L, Lv W, Liu J, Zhang X, Liang K, Yang R, Han D. Performance of Active-Quenching SPAD Array Based on the Tri-State Gates of FPGA and Packaged with Bare Chip Stacking. Sensors. 2023; 23(9):4314. https://doi.org/10.3390/s23094314
Chicago/Turabian StyleLiu, Liangliang, Wenxing Lv, Jian Liu, Xingan Zhang, Kun Liang, Ru Yang, and Dejun Han. 2023. "Performance of Active-Quenching SPAD Array Based on the Tri-State Gates of FPGA and Packaged with Bare Chip Stacking" Sensors 23, no. 9: 4314. https://doi.org/10.3390/s23094314
APA StyleLiu, L., Lv, W., Liu, J., Zhang, X., Liang, K., Yang, R., & Han, D. (2023). Performance of Active-Quenching SPAD Array Based on the Tri-State Gates of FPGA and Packaged with Bare Chip Stacking. Sensors, 23(9), 4314. https://doi.org/10.3390/s23094314