
Novel Results on SNR Estimation for Bandlimited Optical Intensity Channels


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Signal and Channel Model
3. Data-Aided SNR Estimation
3.1. Log-Likelihood Function
3.2. Modified Cramer–Rao Lower Bound
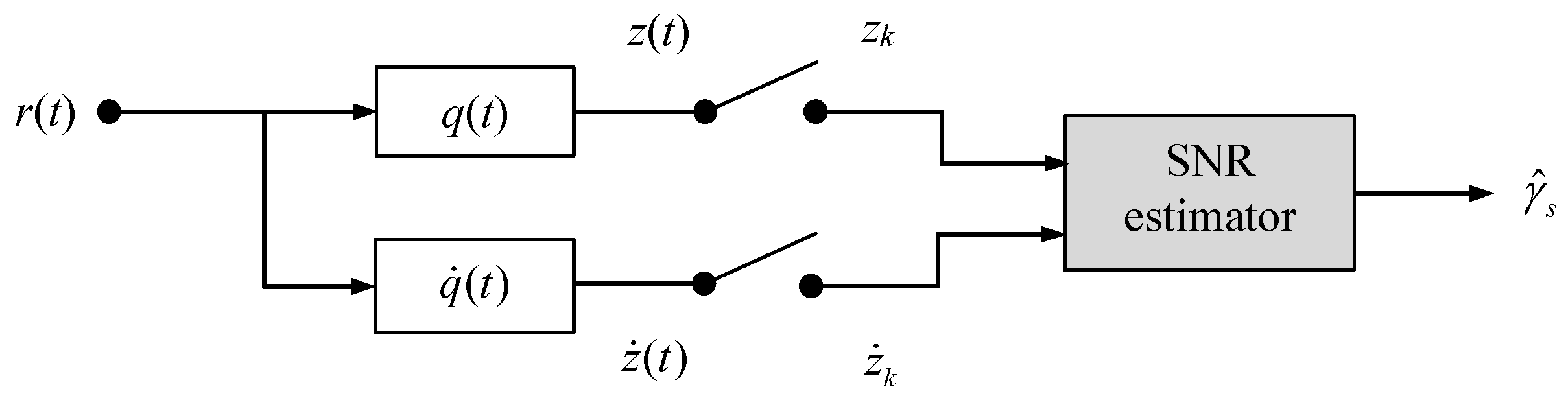
3.3. Maximum Likelihood Estimator
| Algorithm 1: ML estimator. |
| Initialization Pre-calculation of Creation of pilot sequence c and vector y of observables Computation Auxiliary terms: Channel gain estimate: Noise power estimate: Output SNR estimate: |
4. Non-Data-Aided SNR Estimation
4.1. Asymptotic Cramer–Rao Lower Bound
4.2. Moment-Based Estimator
| Algorithm 2: MB estimator. |
| Initialization Collection of L filter outputs: Computation Modified first-order moment: Modified second-order moment: Output SNR estimate: |
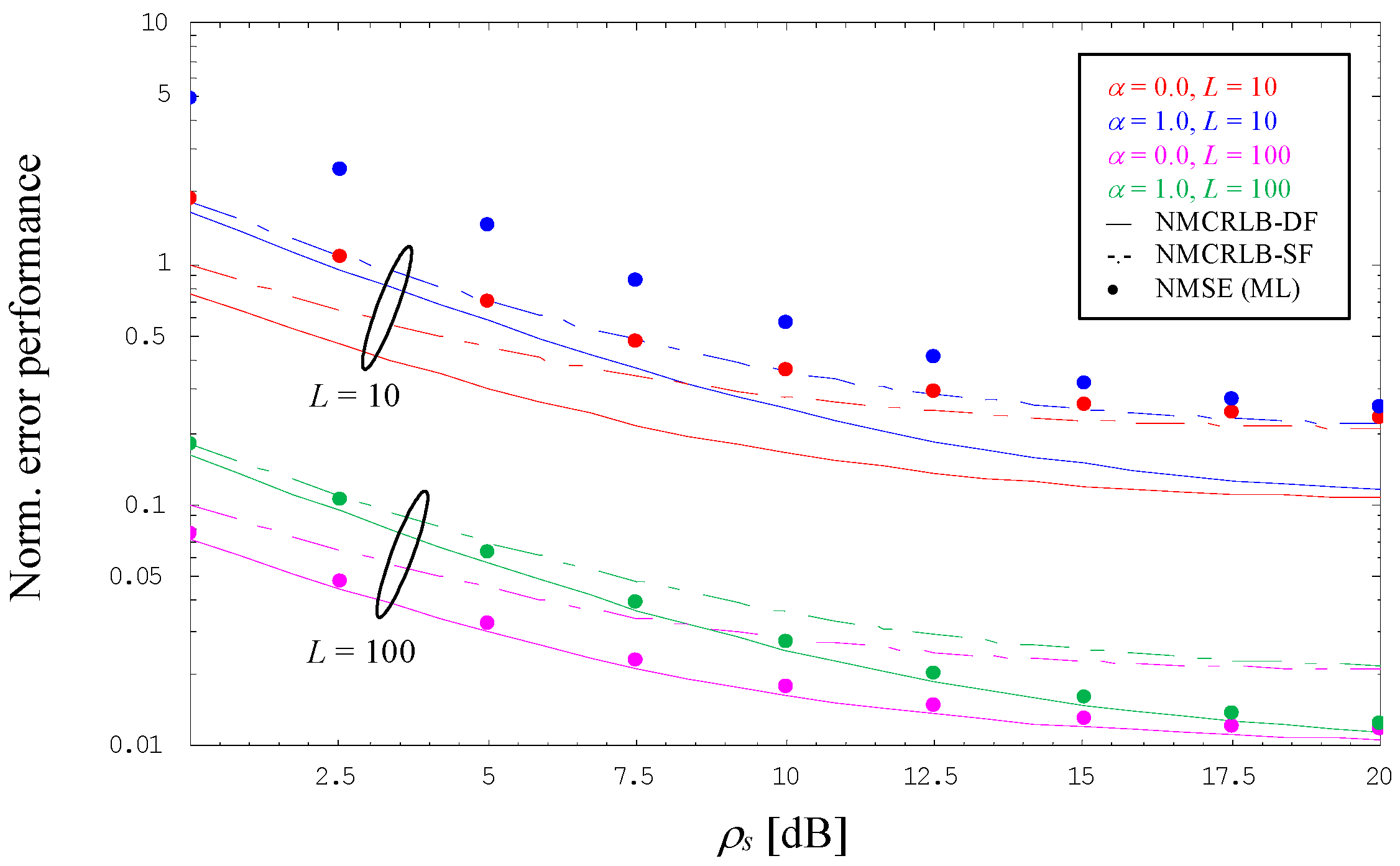
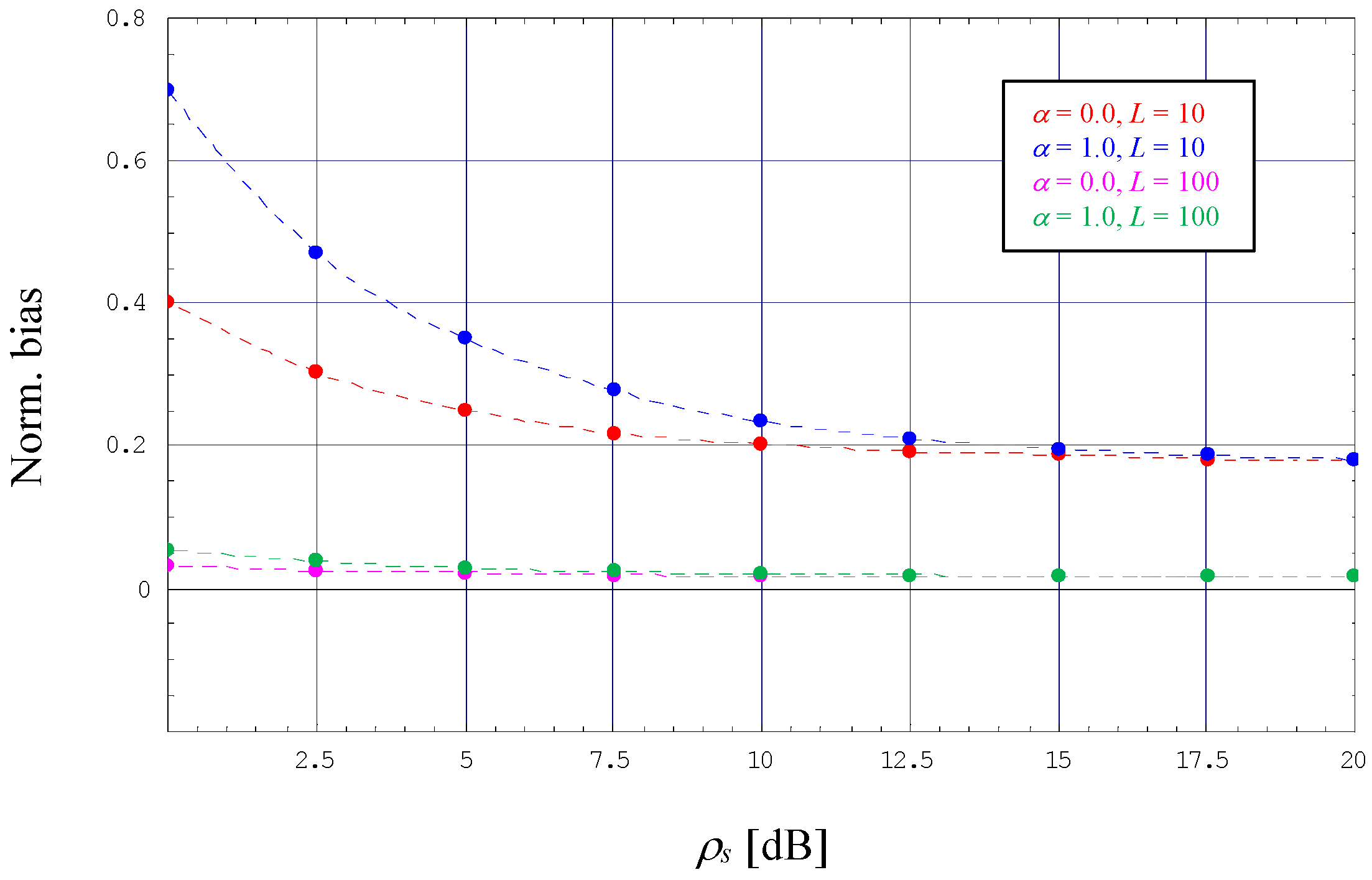
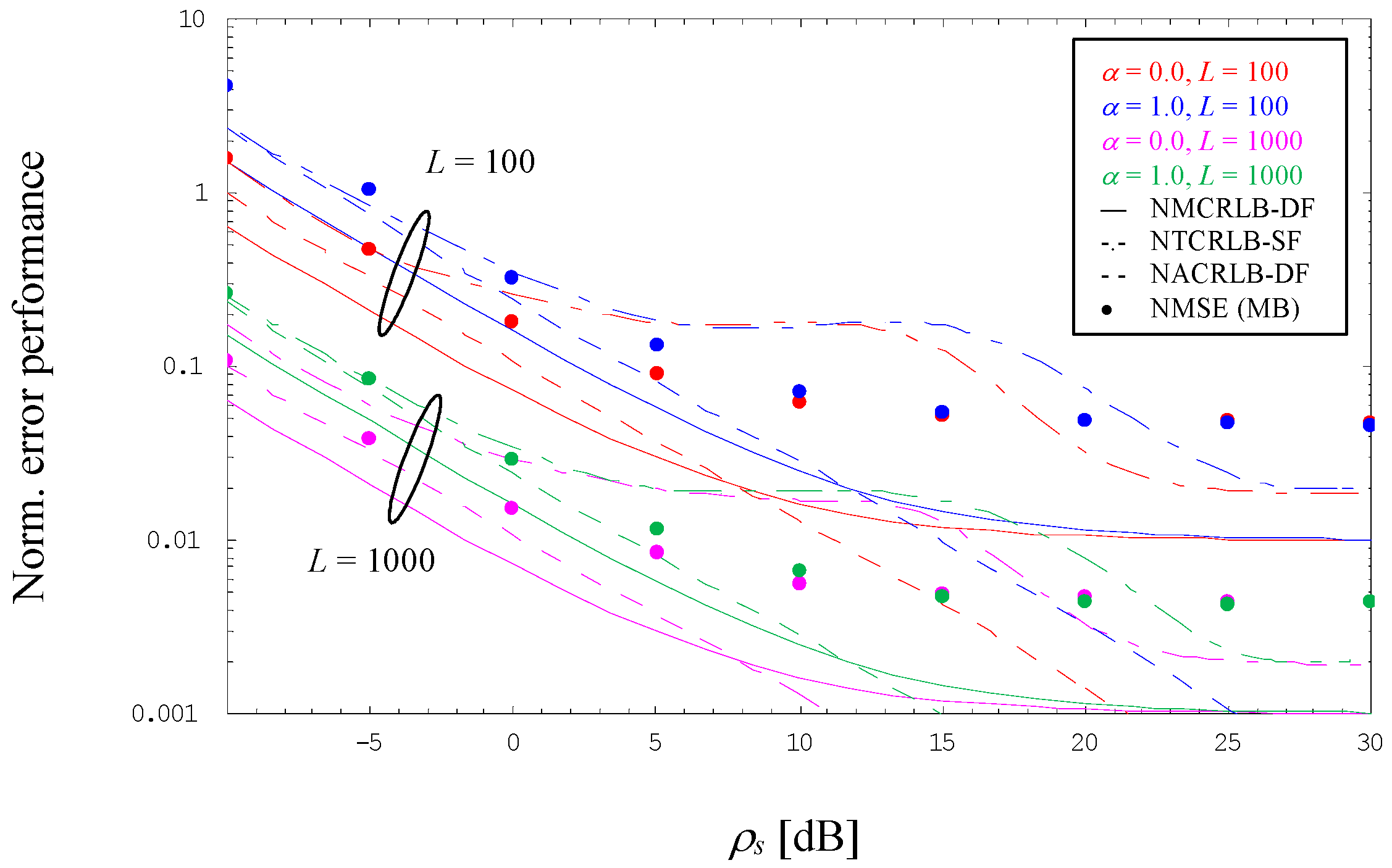
5. Numerical Results
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Hranilovic, S. Wireless Optical Communication Systems; Springer: New York, NY, USA, 2004. [Google Scholar]
- Arnon, S.; Barry, J.; Karagiannidis, G.; Schober, R.; Uysal, M. Advanced Optical Wireless Communication Systems; Cambridge University Press: New York, NY, USA, 2012. [Google Scholar]
- Khalighi, M.A.; Uysal, M. Survey on free space optical communication: A communication theory perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Ghassemlooy, Z.; Arnon, S.; Uysal, M.; Xu, Z.; Cheng, J. Emerging optical wireless communications—Advances and challenges. IEEE J. Select. Areas Commun. 2015, 33, 1738–1749. [Google Scholar] [CrossRef]
- Tavan, M.; Agrell, E.; Karout, J. Bandlimited intensity modulation. IEEE Trans. Commun. 2012, 60, 3429–3439. [Google Scholar] [CrossRef]
- Czegledi, C.; Khanzadi, M.R.; Agrell, E. Bandlimited power-efficient signaling and pulse design for intensity modulation. IEEE Trans. Commun. 2014, 62, 3274–3284. [Google Scholar] [CrossRef]
- Hranilovic, S. Minimum-bandwidth optical intensity Nyquist pulses. IEEE Trans. Commun. 2007, 55, 574–583. [Google Scholar] [CrossRef]
- Chung, T.S.; Goldsmith, A.J. Degrees of freedom in adaptive modulation: A unified view. IEEE Trans. Commun. 2001, 49, 1561–1571. [Google Scholar] [CrossRef]
- Summers, T.A.; Wilson, S.G. SNR mismatch and online estimation in turbo decoding. IEEE Trans. Commun. 1998, 46, 421–423. [Google Scholar] [CrossRef]
- Gappmair, W. Non-data-aided SNR estimation for bandlimited optical intensity channels. Sensors 2023, 23, 802. [Google Scholar] [CrossRef]
- Gappmair, W. Data-aided SNR estimation for bandlimited optical intensity channels. Sensors 2022, 22, 8660. [Google Scholar] [CrossRef]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. Roy. Stat. Soc. B 1977, 39, 1–22. [Google Scholar] [CrossRef]
- Moon, T.K. The expectation-maximization algorithm. IEEE Signal Process. Mag. 1996, 13, 47–60. [Google Scholar] [CrossRef]
- Boujelben, M.A.; Bellili, F.; Affes, S.; Stephenne, A. EM algorithm for non-data-aided SNR estimation of linearly-modulated signals over SIMO channels. In Proceedings of the 2009 IEEE Global Telecommunications Conference (GLOBECOM), Honolulu, HI, USA, 30 November–4 December 2009. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Mengali, U.; D’Andrea, A.N. Synchronization Techniques for Digital Receivers; Plenum Press: New York, NY, USA, 1997. [Google Scholar]
- Meyr, H.; Moeneclaey, M.; Fechtel, S.A. Digital Communication Receivers: Synchronization, Channel Estimation, and Signal Processing; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Liu, Y.; Bauer, P.H. Frequency domain limitations in the design of nonnegative impulse response filters. IEEE Trans. Signal Process. 2010, 58, 4535–4546. [Google Scholar]
- Stepniak, G. Minimum bandwidth nonnegative pulses for optical transmission. IEEE Commun. Lett. 2019, 23, 438–441. [Google Scholar] [CrossRef]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing: Principles, Algorithms, and Applications; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Gappmair, W. On parameter estimation for bandlimited optical intensity channels. Computation 2019, 7, 11. [Google Scholar] [CrossRef]
- Gappmair, W.; Nistazakis, H.E. Blind symbol timing estimation for bandlimited optical intensity channels. In Proceedings of the 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020. [Google Scholar]
- Gappmair, W.; Schlemmer, H. Feedback solution for symbol timing recovery in bandlimited optical intensity channels. In Proceedings of the 2022 International Conference on Broadband Communications for Next Generation Networks and Multimedia Applications (CoBCom), Graz, Austria, 12–14 July 2022. [Google Scholar]
- Proakis, J.G. Digital Communications; McGraw-Hill: New York, NY, USA, 1989. [Google Scholar]
- Papoulis, A. Probability, Random Variables, and Stochastic Processes; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- D’Andrea, A.N.; Mengali, U.; Reggiannini, R. The modified Cramer-Rao bound and its application to synchronization problems. IEEE Trans. Commun. 1994, 42, 1391–1399. [Google Scholar] [CrossRef]
- Gini, F.; Reggiannini, R.; Mengali, U. The modified Cramer-Rao bound in vector parameter estimation. IEEE Trans. Commun. 1998, 46, 52–60. [Google Scholar] [CrossRef]
- Moeneclaey, M. On the true and the modified Cramer-Rao bounds for the estimation of a scalar parameter in the presence of nuisance parameters. IEEE Trans. Commun. 1998, 46, 1536–1544. [Google Scholar] [CrossRef]
- Scharf, L.L. Statistical Signal Processing; Prentice-Hall: Upper Saddle River, NJ, USA, 1990. [Google Scholar]
- Pauluzzi, D.R.; Beaulieu, N.C. A comparison of SNR estimation techniques for the AWGN channel. IEEE Trans. Commun. 2000, 48, 1681–1691. [Google Scholar] [CrossRef]
- Stephenne, A.; Bellili, F.; Affes, S. Moment-based SNR estimation over linearly-modulated wireless SIMO channels. IEEE Trans. Wirel. Commun. 2010, 9, 714–722. [Google Scholar] [CrossRef]
- Lopez-Valcarce, R.; Mosquera, C. Sixth-order statistics-based non-data-aided SNR estimation. IEEE Commun. Lett. 2007, 11, 351–353. [Google Scholar] [CrossRef]
- Alvarez-Diaz, M.; Lopez-Valcarce, R.; Mosquera, C. SNR estimation for multilevel constellations using higher-order moments. IEEE Trans. Signal Process. 2010, 58, 1515–1526. [Google Scholar] [CrossRef]
- Bellili, F.; Stephenne, A.; Affes, S. Cramer-Rao lower bounds for NDA SNR estimates of square QAM modulated transmissions. IEEE Trans. Commun. 2010, 55, 3211–3218. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gappmair, W. Novel Results on SNR Estimation for Bandlimited Optical Intensity Channels. Sensors 2024, 24, 23. https://doi.org/10.3390/s24010023
Gappmair W. Novel Results on SNR Estimation for Bandlimited Optical Intensity Channels. Sensors. 2024; 24(1):23. https://doi.org/10.3390/s24010023
Chicago/Turabian StyleGappmair, Wilfried. 2024. "Novel Results on SNR Estimation for Bandlimited Optical Intensity Channels" Sensors 24, no. 1: 23. https://doi.org/10.3390/s24010023
APA StyleGappmair, W. (2024). Novel Results on SNR Estimation for Bandlimited Optical Intensity Channels. Sensors, 24(1), 23. https://doi.org/10.3390/s24010023