
Underwater Multi-Channel MAC with Cognitive Acoustics for Distributed Underwater Acoustic Networks


Abstract
:1. Introduction
- To minimize the time between sensing and data transmission, a single frame is divided into multiple subframes. Each subframe sequentially conducts channel scanning, channel selection based on sensing information, and data transmission;
- Only one CU transmits data in each subframe to prevent collisions and back-off time during simultaneous data transmission attempts by multiple CUs. Although this method restricts the parallel use of all available channels, it affords more data communication opportunities for all CUs compared to the frame structure of MMAC-CR. While MMAC-CR allows data transmission only on the interference-free channels per frame, UMMAC-CA offers increased data communication chances based on the number of subframe repetitions within a frame;
- CUs maintain a pre-determined transmission schedule to autonomously determine the data transmission order. Leveraging this schedule, CUs independently decide on data transmission based on frame and subframe index values. This mechanism ensures that if the sender CU in a specific subframe fails to transmit data to the sender CU, this does not impact the operation of other CUs in the subsequent subframe. Therefore, the use of a pre-determined data transmission matrix not only eliminates interference with other CUs but also reduces the message overhead associated with channel occupancy;
- During the data exchange among specific sender and receiver CUs within a subframe, CUs that are neither transmitting nor receiving data sense the status of NCUs. This approach enables the sender or receiver CU of the next subframe to select channels for data transmission or reception without the need for additional NCU sensing time;
- In MMAC-CR, all CUs sense the data channels in Phase I, share sensing information in Phase II, occupy channels in Phase III, and perform data transmission in Phase IV. In contrast, UMMAC-CA utilizes the pre-determined data transmission matrix in each subframe, allowing only a specific sender–receiver CU pair to reserve channels and exchange data per subframe, while the rest of the CUs sense the data channels. Particularly, since sensing information is not shared across the network as it is in MMAC-CR, there is no associated control signal overhead. Therefore, even though the frame is fragmented into subframes, the working load of each CU does not significantly increase. However, CUs not involved in data transmission in a subframe need to sense the data channels. This may lead to increase the received power consumption for sensing, which is proportional to the number of subframes.
2. Feasibility Analysis of MMAC-CR for UCANs
- Phase I is the time during which nodes synchronize their frames and scan the availability of data channels. To accomplish this, nodes competitively broadcast beacons;
- Phase II is the time dedicated to sharing the sensing results of data channels among the nodes in the network, and this consists of mini-slots corresponding to the number of data channels. In each mini-slot, nodes transmit data channel status information based on the Distributed Coordination Function (DCF). If a node receives a Scan Result Packet (SRP) during that slot, it backs off for a certain period;
- Phase III is the time during which nodes utilize the sensing results of data channels to reserve data channels for data transmission between sending and receiving nodes on available data channels. This process involves the use of an Ad hoc Traffic Indication Message (ATIM) and ATIM_ACKnowledgement (ATIM_ACK) messages;
- Phase IV is the period during which nodes engage in data transmission and reception based on the channel reservation results, facilitated by the exchange of Request To Send (RTS)-Clear To Send (CTS)-Data-ACK messages between two nodes. The blocks highlighted in red in Phase IV of Figure 1 represent unavailable data channels. Nodes can transmit and receive data on the remaining data channels excluding these channels.
- The length of Phase I is defined as by assuming the beacon is propagated to the CUs at the network edge. is represented as ;
- Since Phase II consists of multiple slots equal to the number of data channels, the length of Phase II is expressed as . In [25], although the slot length was initially provided as being very short, it must be adjusted to account for the maximum propagation delay required for an SRP message to reach the CUs at the network edge in an underwater environment;
- The length of Phase III is derived considering a simple scenario where all CUs are fully occupied to account of the most complex scenario; all CUs transmit and receive ATIM-ATIM_ACK messages sequentially. The length of Phase III is determined as under the assumption that each ATIM-ATIM_ACK message exchange per CU can be completed without collisions within ;
- In [25], multiple CUs attempt data transmission on idle data channels during Phase IV. However, this concept is inefficient for a UCAN due to the potential increases in message overhead and power consumption caused by back-off mechanisms in case of unfavorable channel conditions or collisions. Therefore, this paper assumes that only one CU occupies an idle data channel and performs data transmission to avoid cascading collisions and delays. Since the sender CU and receiver CU exchange four messages (RTS-CTS-Data-ACK), the length of Phase IV is represented as ;
- The length of a frame is finally expressed as . In a UCAN, due to the limited bandwidth and low propagation velocity, the propagation delay is generally greater than the transmission delay. Moreover, when the communication distance is several kilometers, the propagation delay is typically on the order of seconds. Therefore, depending on the number of data channels and CUs, the length of a frame can range from tens of seconds to minutes.
- To prevent collisions caused by NCUs, the frequent sensing of their status is necessary. However, applying MMAC-CR directly to a UCAN may lead to Phase I being too short for adequate sensing, resulting in an inability to adapt to changes in the NCU status during subsequent phases. This timing mismatch between sensing and sharing channel occupancy information can significantly increase the likelihood of NCU-induced collisions in Phase IV;
- Additionally, Phases II and III, focused on sharing the channel state and selecting data channels, are considerably longer than Phase IV, where data transmission occurs. This disparity in duration may elevate the collision rates due to NCUs and prolong the time needed for control signaling, ultimately reducing network throughput. Consequently, the proportion of time allocated to actual data transmission within the total frame time diminishes;
- Thus, it is necessary to reduce frame length through efficient channel state sharing, channel occupancy, and data transmission. This involves developing more effective methods for sharing channel state and occupancy while minimizing the number of control messages. Moreover, alternative channel access methods, less prone to time delays like those encountered with 802.11 DCF back-offs, should be explored for a distributed UCAN.
3. UMMAC-CA
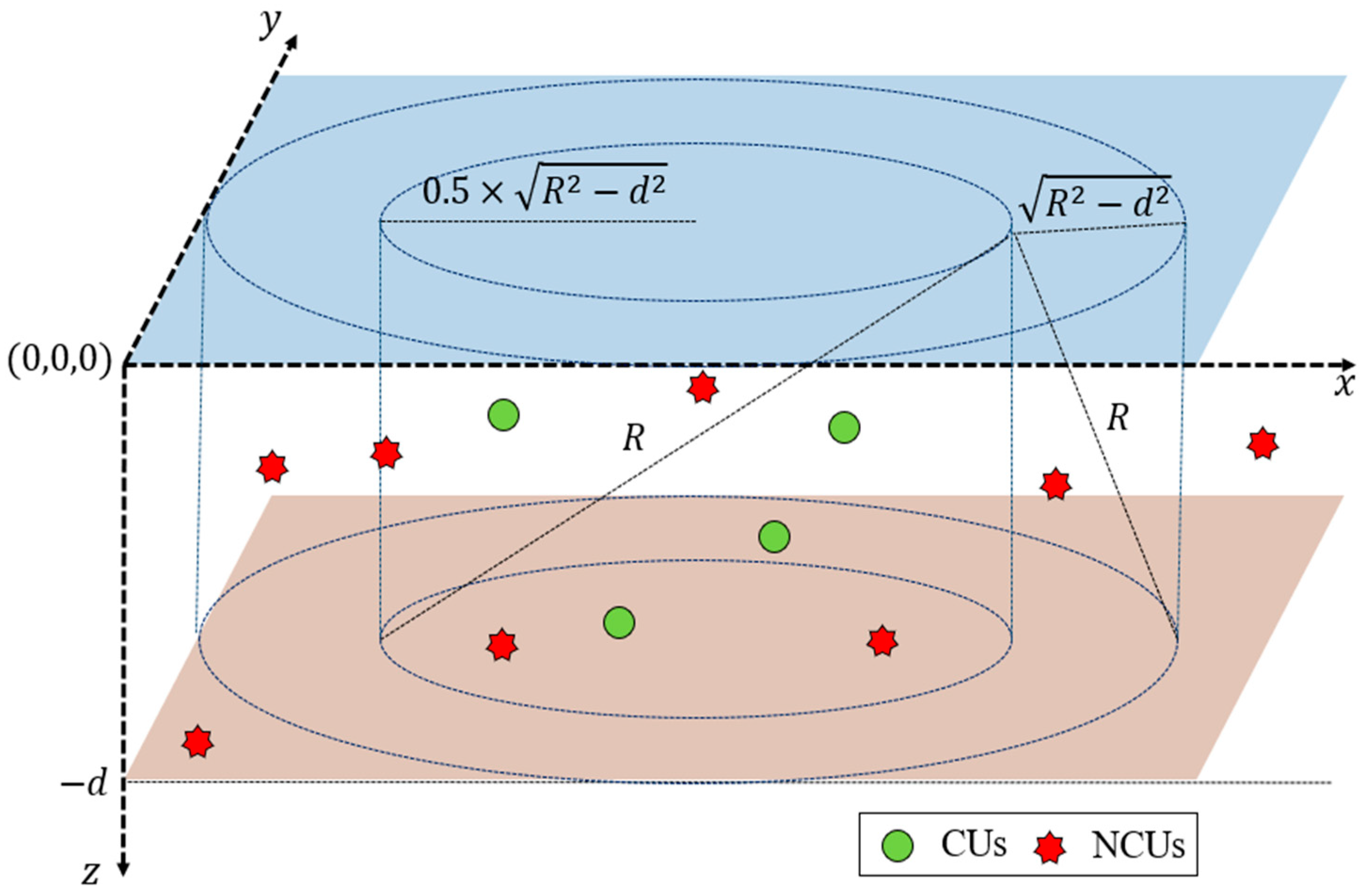
3.1. Network Model
3.2. Division in the Time and Frequency Domains
3.3. Transmission Scheduling
3.4. Data Channel Determination and Data Transmission Methods
- As depicted in Figure 3, the time allocated to () consists of the time for exchanging ATIM-ATIM_ACK messages and the time for transmitting and receiving Data-Data_ACK messages. Here, each CU determines whether it is the Sender CU at (FI, SFI) based on the data transmission matrix as described in Section 3.3. The sender CU of the () generates an ATIM message to the receiver CU, the destination where the sender CU tries to transmit its data. In this process, the ATIM message includes the indices of the sender CU index (i.e., ) and the receiver CU index (i.e., ), along with the status of each data channel sensed by the sender CU regarding the status of NCUs;
- The sender CU generates and transmits the ATIM message at the beginning of the subframe. This is because the sender CU may not know the current location of the receiver CU, so it needs to transmit the ATIM message within the maximum propagation delay time;
- The receiver CU verifies that the destination of the received ATIM message is itself. It then compares the channel sensing information received from the sender CU with its own channel sensing information. By excluding data channels where NCUs occur and randomly selecting a data channel from those where NCUs do not exist, the receiver CU determines the data channel (i.e., ). This decision is communicated to the sender CU via an ATIM_ACK message, which includes the sender CU and receiver CU indices, the chosen data channel, and the receiver CU channel sensing information;
- The receiver CU generates and transmits the ATIM_ACK message immediately after the maximum propagation delay has elapsed since the start of the subframe. This is to ensure that the CUs located within the maximum propagation delay distance from the receiver CU can receive the ATIM_ACK message;
- Upon receiving the ATIM_ACK message from the receiver CU, the sender CU confirms the selected data channel index and sets the transmission frequency accordingly. Subsequently, after a double maximum propagation delay (i.e., ) from the start of the subframe, the sender CU transmits a data message to the receiver CU on the selected data channel. If the ATIM_ACK message is not received from the receiver CU by from the start of the subframe, no data transmission occurs;
- The receiver CU that sent the ATIM_ACK message awaits data reception on the selected data channel. If the data message is received from the sender CU within from the start of the subframe, the receiver CU generates and transmits an ACK message on that data channel. If no data is received until , no action is taken;
- Even if the sender CU receives or does not receive an ACK message from the receiver CU, it maintains its reception status in the next subframe since it did not perform a channel scan in this subframe. Additionally, the receiver CU also maintains its reception status in the next subframe.
4. Performance Analysis
4.1. Performance Parameter Definitions
- Sensing time ratio. This parameter is important because it shows whether enough time is guaranteed for detecting NCUs which randomly occur in time, space, and frequency domains;
- Controlling time ratio. This parameter is crucial as it indicates how much time a CU can allocate to data transmission rather than non-data communication;
- Throughput is a fundamental metric for evaluating the overall amount of data across the network, especially in challenging underwater communication environments prone to frequent communication failures;
- The message overhead is another critical network performance parameter. It assesses the number of messages generated for control and data transmission when applying UMMAC-CA, providing insights into protocol efficiency.
- In UMMAC-CA, during a frame, CUs can sense the status of NCUs during both the beacon subframe and the data communication between specific sender and receiver CUs within each subframe. In Figure 3, the overall sensing time in a frame is given as . Therefore, the ratio of the sensing time to the frame length of UMMAC-CA is represented as ;
- In [25], it was stated that fast scanning occurs in Phase I and fine scanning occurs in Phase IV. However, sender and receiver CUs, aiming for data communication, have already completed data channel selection in Phase III. In Phase IV, they intend to transmit data using the DCF. Therefore, additional scanning in Phase IV does not influence the data communication between sender and receiver CUs. Furthermore, if the sensing information from the remaining CUs in Phase IV of the current frame is intended for use in that of the next frame, due to the long propagation delay of underwater acoustic signals, that sensing information is practically outdated. Consequently, in the UCAN environment where MMAC-CR is applied, CUs can effectively utilize only the sensing information from Phase I. In this regard, the sensing time rate of MMAC-CR is represented as .
- The controlling time of UMMAC-CA includes the time for beacon broadcasting and the exchange of ATIM-ATIM_ACK messages for data channel selection. Therefore, the controlling time is equal to . Then, the ratio of the controlling time to the frame length of UMMAC-CA is determined as ;
- In MMAC-CR, all phases except Phase IV are included in the controlling time. Hence, the controlling time rate of MMAC-CR is expressed as .
- In UMMAC-CA, when there is no collision from NCUs during one frame and the same amount of data is transmitted during each subframe, the total amount of data is represented by . However, collisions from NCUs can occur during each subframe. Considering this, the total amount of data, accounting for such collisions, is represented by . Thus, the throughput of UMMAC-CA is represented as ;
- In MMAC-CR, the maximum amount of data without collisions from NCUs is represented by , while the data amount considering collisions is represented by . Thus, the throughput of MMAC-CR is represented as .
- In UMMAC-CR, there is only one message generated due to beacon broadcasting, while the number of messages resulting from ATIM-ATIM_ACK exchanges is considering the number of subframes. And the number of messages generated by Data-ACK messages is depending on the occurrence of collisions with NCUs. Thus, the overall message overhead of UMMAC-CA is given as ;
- In MMAC-CR, during Phase I, one broadcasting message is generated, during Phase II, there are as many data channel-sensing-related messages as the number of data channels (i.e., ). During Phase III, the number of ATIM-ATIM_ACK messages generated is equal to the number of CUs intending to send data in one frame (i.e., ). In Phase IV, the number of messages can vary depending on the presence of collisions with NCUs, affecting the number of RTS, CTS, Data, and ACK messages. Therefore, the number of messages in Phase IV can be represented as . If RTS transmission fails due to collisions with NCUs, is 1. When only RTS transmission is successful, is 2. Furthermore, if RTS and CTS transmissions are successful, is 3, and if RTS, CTS, and Data are successfully transmitted, is 4. The total message overhead for a frame is .
4.2. Assumptions and Conditions for Simulations
- All CUs exist within the network (i.e., they can communicate within one hop), and the entry of new CUs into the network is not considered in this study;
- All CUs are equipped with a CA-enabled communication module that allows for the scanning and tuning of control and data channels;
- To purely compare the performance of two MAC protocols, all messages are transmitted successfully without loss due to harsh channel environments;
- For a fair comparison with UMMAC-CR, in MMAC-CR, in Phase III, all CUs perform data channel selection without collisions. Moreover, in Phase IV, only data communication between specific sender and receiver CUs occurs on available data channels;
- While CUs are mobile, they do not leave the network coverage area;
- The occurrence locations, times, and durations of NCUs are random, and NCUs occurring within the maximum communication range of CUs can be sensed;
- All CUs are fully occupied, and the buffer capacity is sufficient to prevent data loss.
- The sea depth () and the maximum communication range () are given as 100 and 5000 m, respectively;
- The moving velocity of a CU is given as 2 mps;
- The data rate () is 1 kbps;
- The transmission delay () is set to 0.5 s;
- The maximum propagation delay is given as 3.33 s considering the average acoustic speed is 1500 mps and the maximum communication range of 5000 m;
- The sum of the maximum propagation delay, transmission delay, and gourd time are set to 4 s (i.e., );
- The data transmission time coefficient () is given as 1:1:10;
- The number of data channels () is 25;
- The number of CUs is given as the set of [10, 25, 50]. This is set to account for scenarios where the number of CUs is smaller than, equal to, or greater than the number of data channels;
- is set equal to , implying that the occurrence time duration of an NCU is uniformly distributed in the range of [1, T]. The occurrence time of an NCU () is also uniformly distributed in the range of [1, T]. From these conditions, an NCU can exist over two frames at most;
- The number of NCUs that occur at one data channel per frame follows a Poisson distribution with an average number of NCUs per frame, , varying from 1.0 to 5.0 in steps of 2.0;
- The simulation time, expressed as the number of total frames (), is set to .
- Analyzing the performance by fixing the average number of NCUs () occurring on a single channel and varying the data transmission time coefficient () and the number of CUs ();
- Investigating the performance by fixing the number of CUs () and varying the data transmission time coefficient () and the average number of NCUs occurring on a single channel ();
- In each scenario, simulations are executed for each condition, and the average performance is obtained.
4.3. Simulation Results
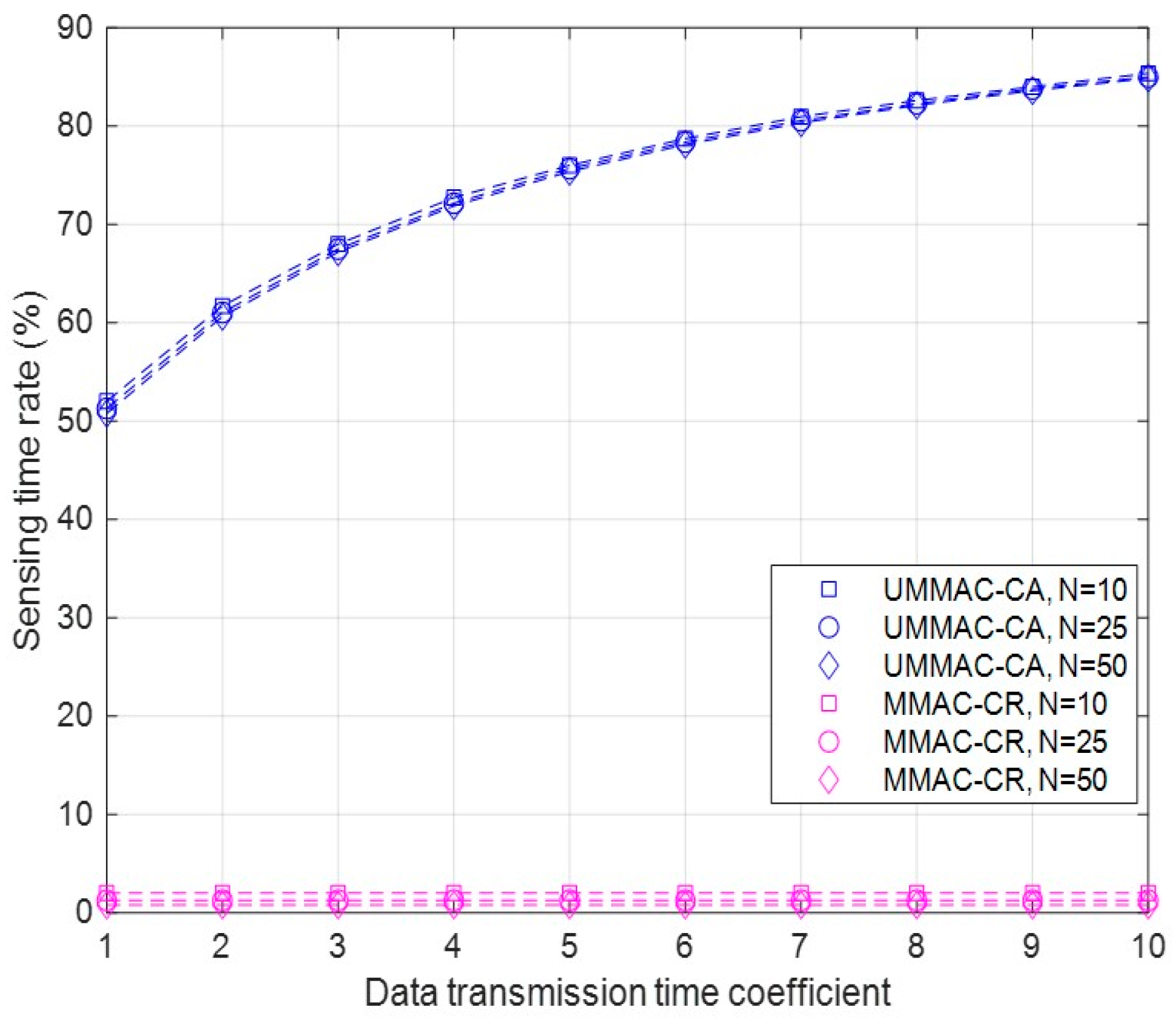
- As defined in the sensing time rate, sufficient sensing time must be ensured to adequately detect NCUs before data transmission can occur. Since the sensing time rate is independent from NCU occurrences, simulations are conducted varying only the number of CUs and the data transmission time coefficient to derive the test results;
- As depicted in Figure 5, simulation results show that UMMAC-CR guarantees at least 50% of the sensing time rate regardless of the variable conditions. As the data transmission time coefficient increases, the number of subframes decreases. Consequently, the length of data transmission increases.
- This time represents the duration of data transmission for sender and receiver CUs, but for other CUs, it becomes the time for data channel sensing. Therefore, a longer data transmission time allows for more sensing;
- In contrast, MMAC-CR achieves a sensing time rate of only 2% of the total frame. This is because the sensing results in Phase I can be only used in data transmission in Phase IV. A short sensing time implies unreliable results for sensing before data transmission, which can be critical for network performance, especially with greater randomness in NCU occurrences;
- Regarding the number of CUs, while the sensing time rate decreases as the number of CUs increases in MMAC-CR, the difference is unremarkable. For UMMAC-CR, as the number of CUs increases, the number of subframes increases, leading to an increase in both data transmission and sensing time, resulting in almost no difference in the sensing time rate, as shown in Figure 5. Therefore, the number of CUs does not significantly affect the sensing time rate, indicating that both media access control mechanisms provide a consistent sensing time rate regardless of the number of CUs;
- As a result, UMMAC-CA can significantly increase the sensing time rate compared to MMAC-CR, but it may consume more received power for sensing the data channels accordingly. While in MMAC-CR, all CUs only sense the data channels in Phase I, in UMMAC-CA, CUs not involved in data transmission in each subframe sense the data channels. Let us denote the received power per data channel as . The total power consumption for receiving for the CUs not transmitting data in one subframe is , where is the number of data channels. Therefore, as one frame consists of subframes, an additional received power consumption of is incurred. This additional power consumption can be considered as the trade-off for UMMAC-CA ensuring a 50% sensing time compared to MMAC-CR.
- The controlling time rate represents the proportion of time allocated to non-data transmission relative to the frame, indicating how long non-data communication time is incurred through non-data transmission to send data. Since the controlling time rate is also independent from NCU occurrences, the results are derived by varying only the number of CUs and the data transmission time coefficient;
- In the case of MMAC-CR, the time excluding Phase IV, where data transmission occurs, corresponds to the time related to non-data communication. In the case of UMMAC-CR, this includes the beacon transmission and data channel selection time;
- Simulation results show that regardless of variable conditions, UMMAC-CR exhibits significantly lower controlling time rates compared to those of MMAC-CR, as shown in Figure 6. This is because in UMMAC-CR, while specific sender and receiver CUs engage in data transmission, the rest of the CUs engage in channel sensing, sharply reducing channel sensing time. Furthermore, for data transmission time coefficients above 2.0, UMMAC-CR reduces the controlling time rate by over 50% compared to that of MMAC-CR;
- In UMMAC-CR, there is an almost inverse relationship between the sensing time rate performance and the controlling time rate performance. This is because, excluding beacon broadcasts, the sensing time directly corresponds to the data transmission time between specific sender and receiver CUs, while the non-data communication time represents the time excluding data transmission time in the entire frame. Therefore, the pattern of controlling time rate performance based on the number of CUs and the data transmission time is opposite to that of the sensing time rate performance, as shown in Figure 5 and Figure 6. On the other hand, in MMAC-CR, since the sensing time is part of the non-data communication time, the controlling time rate is much larger than the sensing time rate, as depicted in Figure 5 and Figure 6.
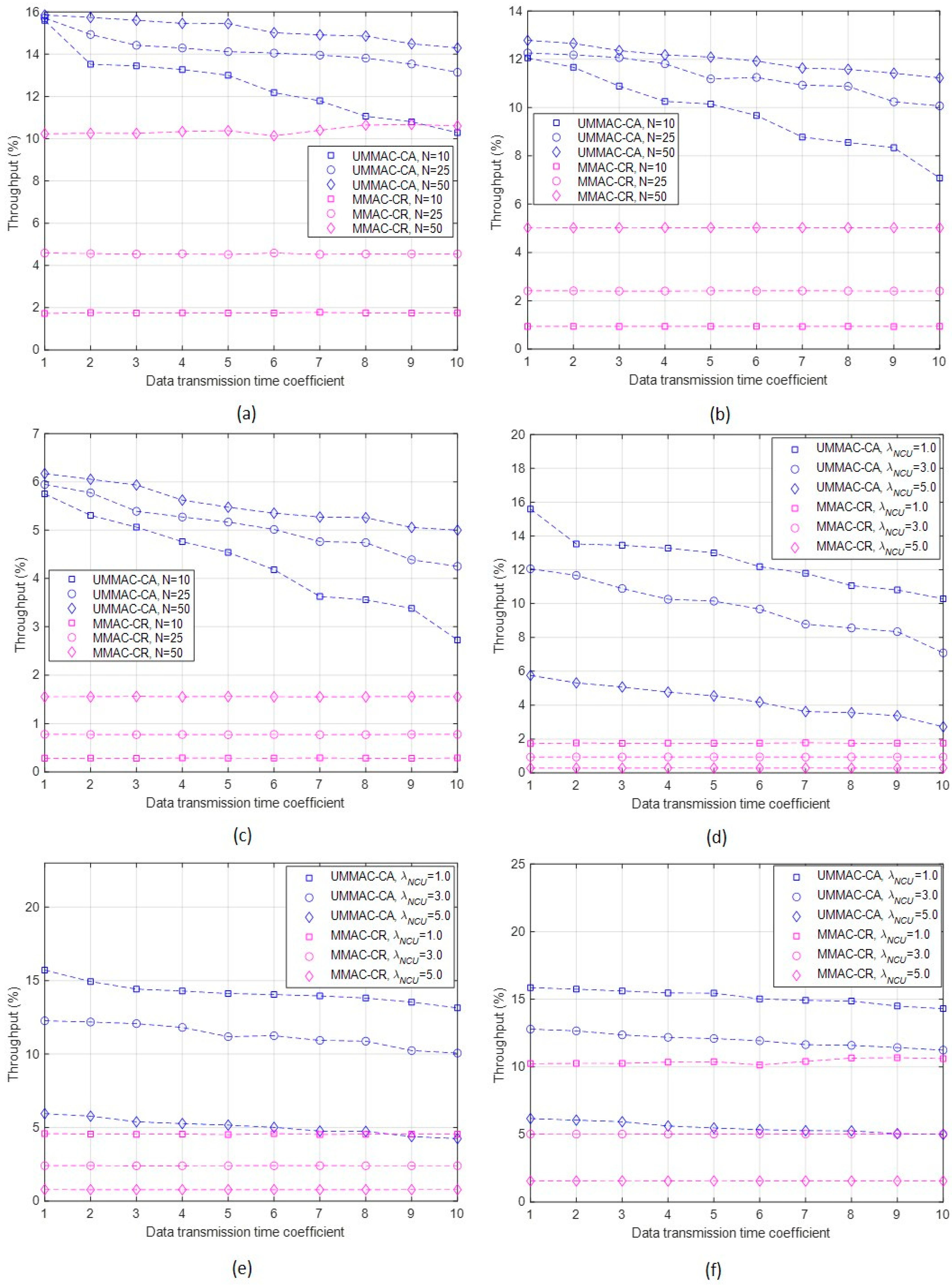
- The throughput performance represents the ratio of the total amount of data transmitted on non-collision data channels to the amount of data that would be transmitted when all channels are utilized (i.e., in the NCU collision-free case). This performance metric allows us to assess how much data transmission occurred on idle data channels by avoiding collisions from NCUs;
- In the case of UMMAC-CA, regardless of the conditions of the average NCU occurrence per data channel (i.e., ) and the number of CUs (), the throughput decreases with the data transmission time coefficient value (), as depicted in Figure 7a–f. As the data transmission time coefficient increases, the sensing time also increases (confirmed through the sensing time rate results). However, higher data transmission times can also increase the probability of collision with undetected NCUs, reducing the probability of successful data transmission during this time. To improve throughput in UMMAC-CA, it is necessary to reduce the data transmission time. This can be achieved by shortening the sensing time in one subframe to decrease the probability of interference with NCUs;
- In contrast, MMAC-CR shows throughput performance independent of the data transmission time coefficient. This can be inferred from the definition of throughput and confirmed through simulations, as shown in Figure 7. In addition, reducing the data transmission time coefficient in UMMAC-CA can mitigate the difference in throughput between UMMAC-CA and MMAC-CR. However, through simulations under the same conditions (the number of CUs and the number of NCUs), UMMAC-CA consistently outperforms MMAC-CR in terms of throughput;
- Throughput performance increases with a larger number of CUs in both MAC protocols. In the case of UMMAC-CA, as the number of CUs increases, the number of subframes in one frame () increases. This results in an increase in both the numerator and denominator of the throughput formula, but the increase in enables more data transmission, leading to an overall increase in throughput, as illustrated in Figure 7a–c. For MMAC-CR, an increase in CUs increases the probability of using idle data channels, ultimately leading to an increase in throughput. Since both MAC protocols operate on a non-contention basis, the increased competition with an increase in the number of CUs has less impact on throughput performance compared to the greater likelihood of channels being ‘under-utilized’ when the CU count is low;
- Conversely, throughput increases as the number of NCUs decreases (i.e., when is low) for both MAC protocols, as shown in Figure 7d–f. This is because a lower probability of NCU occurrences reduces the likelihood of collisions with NCUs, leading to an increased probability of successful data transmission and, thus, enhanced throughput performance;
- Comparatively, regardless of the values of and , UMMAC-CA outperforms MMAC-CR in throughput. This is because UMMAC-CA periodically executes sensing and data transmission through multiple subframes. The performance difference is more remarkable with lower data transmission time coefficients, smaller numbers of CUs, and smaller numbers of NCUs. For instance, when is 2.0, UMMAC-CA exhibits a throughput performance improvement ranging from a minimum of 37% to a maximum of 90%.
- The message overhead performance refers to the number of messages generated during the execution of a single frame. A higher message overhead can lead to increased resource consumptions such as frequency usage, transmission time, and power consumption;
- In the case of UMMAC-CA, regardless of the values of and , the message overhead decreases with the increase in , as illustrated in Figure 8a–f. This is because as increases, the number of subframes decreases, causing a reduction in the exchange of ATIM-ATIM_ACK messages for data channel selection. Additionally, as increases, the exchange of Data-ACK messages also decreases, resulting in an overall reduction in the message overhead. Conversely, MMAC-CR shows results independent from the values. This is evident from the definition of message overhead and confirmed through simulations. When equals 1, it corresponds to the maximum number of subframes, and this is the only scenario where the message overhead performance of MMAC-CR surpasses that of UMMAC-CA. Except for this case, under given conditions, UMMAC-CA outperforms MMAC-CR in terms of message overhead performance;
- The message overhead performance of both MAC protocols increases with an increase in the number of CUs, as shown in Figure 8a–c. For UMMAC-CA, a higher value leads to an increase in the number of subframes, thereby increasing the message overhead. This contradicts the inverse relationship between message overhead performance and values. For MMAC-CR, the increase in the number of CUs results in an increase in message overhead across all phases except Phase I;
- The message overhead performance increases with a decrease in the number of NCUs (i.e., smaller values) for both MAC protocols, as depicted in Figure 8d–f. This is because a lower probability of NCU occurrence increases the likelihood of successful data transmission, consequently increasing the number of messages. However, the impact of NCUs primarily affects the exchange of Data-ACK messages. This influence is less significant on message overhead compared to the number of CUs, which affects all messages generated in the frame;
- Comparatively, for values greater than or equal to 2.0, UMMAC-CA exhibits a lower message overhead compared to MMAC-CR regardless of and conditions. This is because MMAC-CR consistently generates a significant number of control messages, except in Phase IV, whereas the message generation in UMMAC-CA depends on the number of subframes. Therefore, as increases (i.e., as the number of subframes decreases) or as the number of CUs increases, the performance difference in message overhead becomes more remarkable.
- UMMAC-CA is designed to adjust its performance metrics by tuning the value of for data transmission time, in comparison to MMAC-CR. It has been observed that the performance metrics, except for message overhead, are inversely related to the delta value. In other words, lower values cause better throughput performance but deteriorate other performance metrics;
- With = 1.0, throughput can achieve its maximum irrespective of the network size, but performance varies significantly concerning the number of CUs and NCUs for higher values. Except for message overhead performance, UMMAC-CA demonstrates superiority over MMAC-CR for most performance metrics when equals 1.0;
- In severe underwater conditions, setting to 1.0 seems preferable as it guarantees stable throughput performance even with slightly increased message overhead.
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, S.; Crispo, M.; Bousquet, J.F.; Aljendi, S. A Janus compatible software-defined underwater acoustic multiple-input multiple-output modem. Int. J. Distrib. Sens. Netw. 2021, 17, 15501477211010663. [Google Scholar] [CrossRef]
- Gazi, F.; Misra, S.; Ahmed, N.; Mukherjee, A.; Kumar, N. UnRest: Underwater reliable acoustic communication for multimedia Streaming. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020. [Google Scholar]
- Murad, M.; Sheikh, A.; Manzoor, M.; Felemban, E.; Qaisar, S. A survey on current underwater acoustic sensor network application. Int. J. Comput. Theory Eng. 2015, 7, 51–56. [Google Scholar] [CrossRef]
- Underwater Wireless Communication Market—Global Drivers, Opportunities, Trends, and Forecasts to 2022. Available online: https://www.globenewswire.com/news-release/2017/06/09/1011958/0/en/Underwater-Wireless-Communication-Market-Global-Drivers-Opportunities-Trends-and-Forecasts-to-2022.html (accessed on 1 August 2020).
- Alfouzan, F.A. Energy-efficient collision avoidance MAC protocols for underwater sensor networks: Survey and challenges. J. Mar. Sci. Eng. 2021, 9, 741. [Google Scholar] [CrossRef]
- Jiang, Z. Underwater acoustic network-Issues and solutions. Int. J. Intell. Control Syst. 2008, 13, 152–161. [Google Scholar]
- Yun, C.; Choi, S. A study of standardizing frequencies using channel raster for underwater wireless acoustic sensor networks. Sensors 2021, 21, 5669. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wang, J.; Song, S.; Cui, J.; Wang, X.; Li, B. MMNET: A multi-modal network architecture for underwater networking. Electronics 2020, 9, 2186. [Google Scholar] [CrossRef]
- Li, X.; Guo, Y.; Fu, X.; Pan, M. Dolphins first: Dolphin-aware communications with multi-hop underwater cognitive acoustic networks. IEEE Trans. Wirel. Commun. 2017, 16, 2043–2056. [Google Scholar] [CrossRef]
- Yang, Q.; Su, Y.; Jin, Z.; Yao, G. EFPC: An environmentally friendly power control scheme for underwater sensor networks. Sensors 2015, 15, 29107–29128. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.; Guo, Y.; Cai, S. MAC protocol for underwater acoustic sensor network based on belied state space. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 119. [Google Scholar] [CrossRef]
- Mishachandar, B.; Vairamuthu, S. An underwater cognitive acoustic network strategy for efficient spectrum utilization. Appl. Acoust. 2021, 175, 107861. [Google Scholar] [CrossRef]
- Yun, C. An underwater cooperative spectrum sharing protocol for a centralized underwater cognitive acoustic network. Sensors 2022, 22, 5754. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Si, Y.; Chen, Y. A review of subsea AUV technology. J. Mar. Sci. Eng. 2023, 11, 1119. [Google Scholar] [CrossRef]
- Yun, C. A channel allocation method considering asymmetry of available channels for centralized underwater cognitive acoustic networks. Sensors 2023, 23, 3320. [Google Scholar] [CrossRef]
- Arjoune, Y.; Kaabouch, N. A comprehensive survey on spectrum sensing in cognitive radio networks: Recent advances, new challenges, and future research directions. Sensors 2019, 19, 126. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Li, Y.; Yao, Q. Adaptive energy efficiency maximization for cognitive underwater acoustic network under spectrum sensing errors and CSI uncertainties. Wirel. Commun. Mob. Comut. 2019, 2019, 2875136. [Google Scholar] [CrossRef]
- Yan, L.; Li, X.; Ma, K.; Yan, J.; Han, S. Joint relay selection and power allocation in underwater cognitive acoustic cooperative system with limited feedback. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016. [Google Scholar]
- Liu, X.; Jia, M. Cooperative spectrum sensing and data transmission optimization for multichannel cognitive sonar communication network. EURASIP J. Wirel. Commun. Netw. 2017, 2017, 171. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Peng, Z.; Cui, J. Dynamic control channel MAC for underwater cognitive acoustic networks. In Proceedings of the IEEE INFOCOM 2016—The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Jin, Z.; Li, Y.; Luo, Y.; Yang, Q. Spectrum allocation and protocol based on cognitive acoustic technique in underwater networks. Trans. Tianjin Univ. 2016, 22, 339–344. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Mo, H.; Zhu, Y.; Peng, Z.; Cui, J. Receiver-initiated spectrum management for underwater cognitive acoustic network. IEEE Trans. Mob. Comput. 2017, 16, 198–212. [Google Scholar] [CrossRef]
- Partan, J.; Kurose, J.; Levine, B. A survey of practical issues in underwater networks. In Proceedings of the 1st International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; Volume 1, pp. 23–33. [Google Scholar]
- Casari, P.; Zorzi, M. Protocol design issues in underwater acoustic networks. Comput. Commun. 2011, 34, 2013–2025. [Google Scholar] [CrossRef]
- Timmers, M.; Pollin, S.; Dejonghe, A.; Perre, L.V.; Catthoor, F. A distributed Multichannel MAC protocol for multihop cognitive radio networks. IEEE Trans. Veh. Technol. 2010, 59, 446–459. [Google Scholar] [CrossRef]
- Urick, R. Principle of Underwater Sound, 3rd ed.; MacGraw-Hill Publishing Company: New York, NY, USA, 1983. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| CU index | |
| Sender CU index | |
| Receiver CU index | |
| Data channel index reserved between and | |
| Data transmission time coefficient | |
| The number of subframes | |
| Frame index | |
| Subframe index | |
| The length of a frame | |
| Data rate | |
| The collision probability caused by NCUs in one subframe of UMMAC-CR (0: collision, 1: no collision) | |
| The set of data channels not sensed by NCUs during a frame of MMAC-CR | |
| ) | |
| The index of data channels belonging to | |
| (0: collision, 1: no collision) | |
| The number of CUs with data to transmit in one frame in MMAC-CR | |
| The maximum communication range | |
| The sea depth |
| Parameters | UMMAC-CA | MMAC-CR |
|---|---|---|
| Sensing time rate | ||
| Controlling time rate | ||
| Throughput | ||
| Message overhead |
| Parameters | Conditions | UMMAC-CA | MMAC-CR | |||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | |||
| Sensing time rate (%) | 52.0 | 85.3 | 2.0 | 2.0 | ||
| 51.2 | 85.0 | 1.3 | 1.3 | |||
| 50.7 | 84.8 | 0.7 | 0.7 | |||
| Controlling time rate (%) | 19.5 | 52.0 | 92.0 | 92.0 | ||
| 17.5 | 51.2 | 95.0 | 95.0 | |||
| 16.8 | 50.7 | 96.7 | 96.7 | |||
| Throughput (%) | = 1.0 | 13.1 | 15.7 | 4.5 | 4.5 | |
| = 3.0 | 10.1 | 12.3 | 2.4 | 2.4 | ||
| = 5.0 | 4.3 | 5.9 | 0.8 | 0.8 | ||
| = 3.0 | 7.1 | 12.1 | 0.9 | 0.9 | ||
| 10.1 | 12.3 | 2.4 | 2.4 | |||
| 11.2 | 12.8 | 5.0 | 5.0 | |||
| Message overhead | = 1.0 | 19.8 | 61.0 | 54.2 | 54.5 | |
| = 3.0 | 19.6 | 60.3 | 52.2 | 52.3 | ||
| = 5.0 | 19.3 | 59.1 | 50.6 | 50.7 | ||
| = 3.0 | 10.2 | 38.5 | 36.9 | 37.5 | ||
| 19.6 | 60.3 | 52.2 | 52.3 | |||
| 29.0 | 101.1 | 79.7 | 80.95 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, C. Underwater Multi-Channel MAC with Cognitive Acoustics for Distributed Underwater Acoustic Networks. Sensors 2024, 24, 3027. https://doi.org/10.3390/s24103027
Yun C. Underwater Multi-Channel MAC with Cognitive Acoustics for Distributed Underwater Acoustic Networks. Sensors. 2024; 24(10):3027. https://doi.org/10.3390/s24103027
Chicago/Turabian StyleYun, Changho. 2024. "Underwater Multi-Channel MAC with Cognitive Acoustics for Distributed Underwater Acoustic Networks" Sensors 24, no. 10: 3027. https://doi.org/10.3390/s24103027
APA StyleYun, C. (2024). Underwater Multi-Channel MAC with Cognitive Acoustics for Distributed Underwater Acoustic Networks. Sensors, 24(10), 3027. https://doi.org/10.3390/s24103027