
Multi-Scenario Validation and Assessment of a Particulate Matter Sensor Monitor Optimized by Machine Learning Methods

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Particulate Matter Instruments
2.1.1. Sensor Monitors
2.1.2. Reference Instruments
2.2. Evaluation of Sensor Monitors in Outdoor and Indoor Environments
2.2.1. Evaluation of Sensor Monitors in Outdoor Environment
2.2.2. Evaluation of Sensor Monitors in Indoor Environment
2.3. Statistical Analysis
2.3.1. Intra-Consistency within Sensor Monitors
2.3.2. Inter-Consistency between Sensor Monitors and Reference Instruments
2.3.3. Validation and Optimization of Sensor Monitors by Machine Learning Methods
2.3.4. Marginal Effects of Explanatory Features on the Validation Model
3. Results
3.1. Applicability of TSI as a Reference Instrument for Sensor Monitors
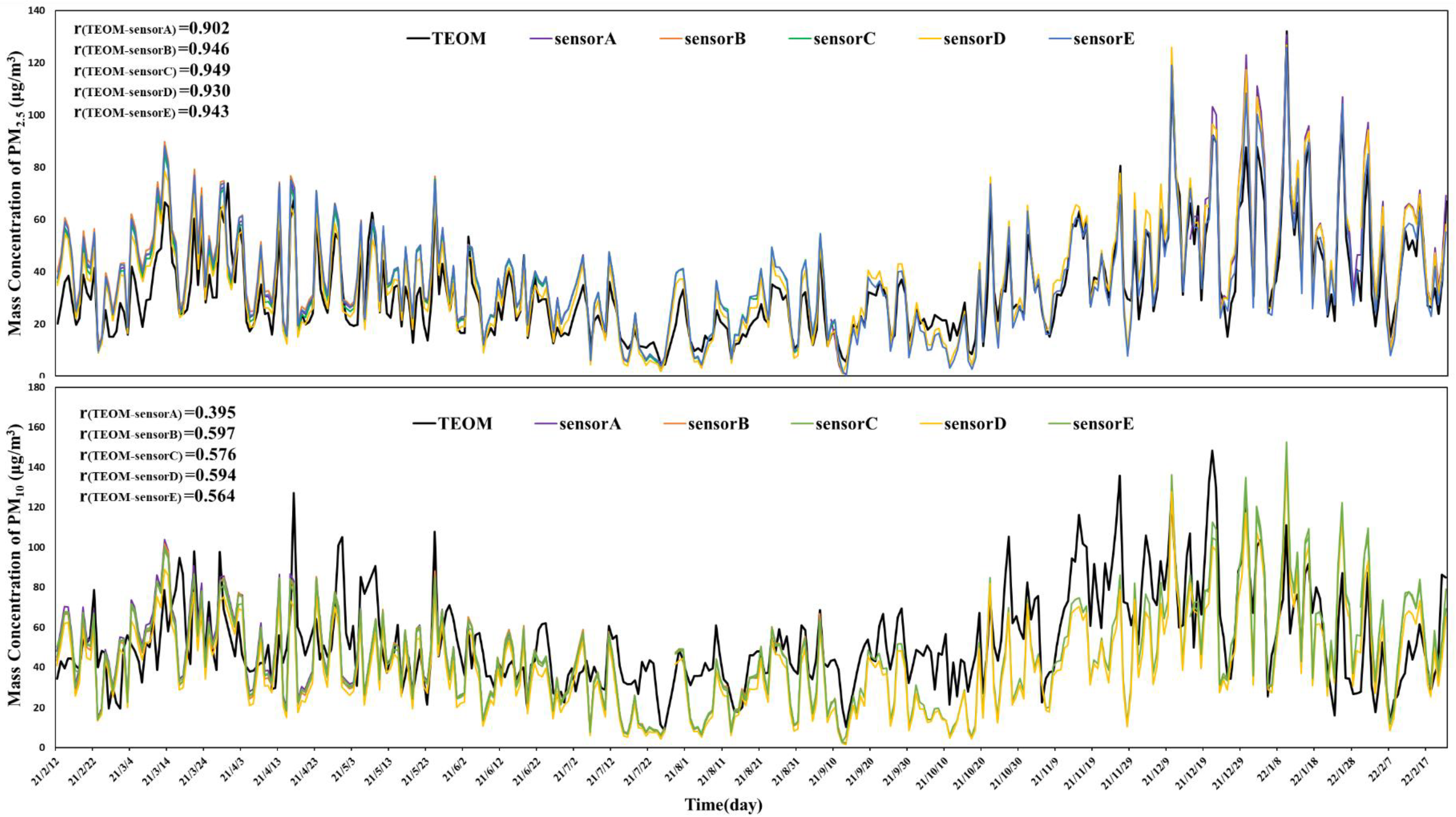
3.2. Parallel Measurements between Sensor Monitors and TEOM in Outdoor Environment
3.3. Parallel Measurements between Sensor Monitors and TSI Instrument in Indoor Environment
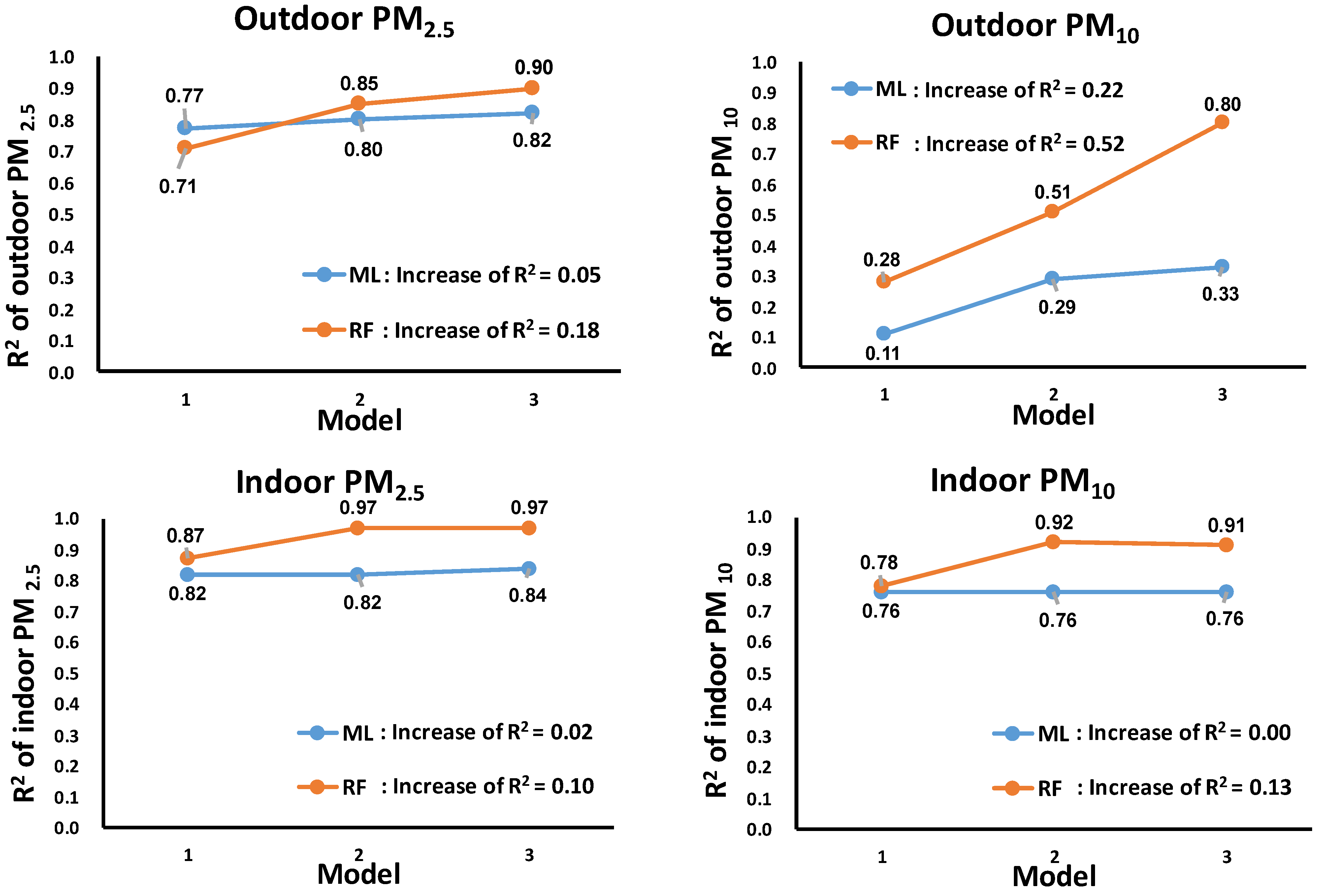
3.4. Validation of Sensor Monitor Data Optimized by Machine Learning Models
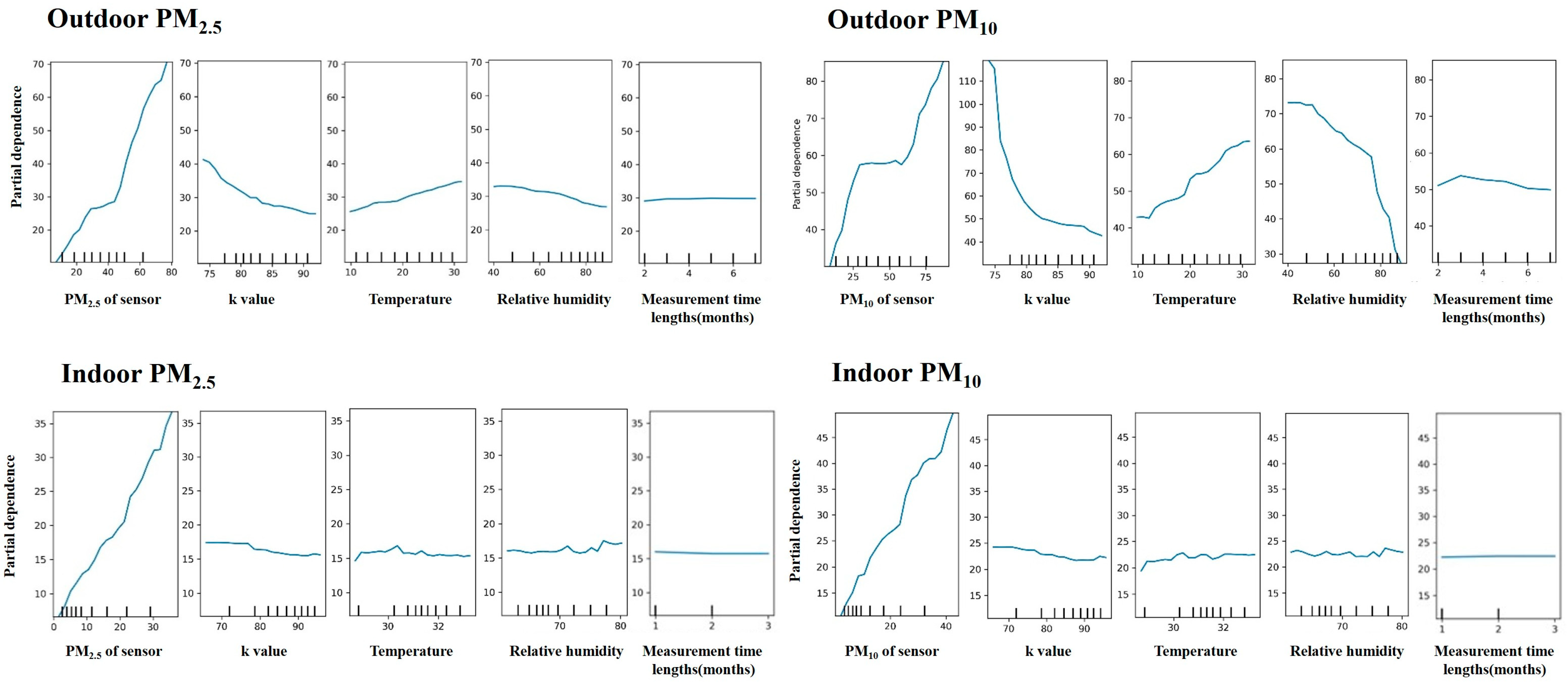
3.5. Marginal Effects of Explanatory Features on the Validation Model
3.6. Evaluation of Sensor Performance after Optimal Validation
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- GBD 2019 Risk Factors Collaborators. Global burden of 87 risk factors in 204 countries and territories, 1990–2019: A systematic analysis for the Global Burden of Disease Study 2019. Lancet 2020, 396, 1223–1249. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, J.; He, M.Z.; Kinney, P.L.; Li, T. A county-level estimate of PM2.5 related chronic mortality risk in China based on multi-model exposure data. Environ. Int. 2018, 110, 105–112. [Google Scholar] [CrossRef]
- Leech, J.A.; Nelson, W.C.; Burnett, R.T.; Aaron, S.; Raizenne, M.E. It’s about time: A comparison of Canadian and American time-activity patterns. J. Expo. Anal. Environ. Epidemiol. 2002, 12, 427–432. [Google Scholar] [CrossRef] [PubMed]
- Environmental Protection Department of China. China Population Exposure Parameters Handbook: Children’s Volume 0–5 Years; China Environmental Publishing House: Beijing, China, 2016; ISBN 978-7-5111-2776-1. [Google Scholar]
- Environmental Protection Department of China. China Population Exposure Parameters Handbook: Children’s Volume 6–17 Years; China Environmental Publishing House: Beijing, China, 2016; ISBN 978-7-5111-2761-7. [Google Scholar]
- Liu, N.; Liu, W.; Deng, F.; Liu, Y.; Gao, X.; Fang, L.; Chen, Z.; Tang, H.; Hong, S.; Pan, M.; et al. The burden of disease attributable to indoor air pollutants in China from 2000 to 2017. Lancet Planet. Health 2023, 7, e900–e911. [Google Scholar] [CrossRef]
- Zhang, A.; Liu, Y.; Zhao, B.; Zhang, Y.; Kan, H.; Zhao, Z.; Deng, F.; Huang, C.; Zeng, X.; Sun, Y.; et al. Indoor PM2.5 concentrations in China: A concise review of the literature published in the past 40 years. Build. Environ. 2021, 198, 107898. [Google Scholar] [CrossRef]
- Hänninen, O.; Knol, A.B.; Jantunen, M.; Lim, T.-A.; Conrad, A.; Rappolder, M.; Carrer, P.; Fanetti, A.-C.; Kim, R.; Buekers, J.; et al. Environmental Burden of Disease in Europe: Assessing Nine Risk Factors in Six Countries. Environ. Health Perspect. 2014, 122, 439–446. [Google Scholar] [CrossRef] [PubMed]
- Logue, J.M.; Price, P.N.; Sherman, M.H.; Singer, B.C. A method to estimate the chronic health impact of air pollutants in U.S. residences. Environ. Health Perspect. 2012, 120, 216–222. [Google Scholar] [CrossRef] [PubMed]
- Mainardi, A.S.; Redlich, C.A. Indoor Air Quality Problems at Home, School, and Work. Am. J. Respir. Crit. Care Med. 2018, 198, P1–P2. [Google Scholar] [CrossRef]
- Cormier, S.A.; Lomnicki, S.; Backes, W.; Dellinger, B. Origin and health impacts of emissions of toxic by-products and fine particles from combustion and thermal treatment of hazardous wastes and materials. Environ. Health Perspect. 2006, 114, 810–817. [Google Scholar] [CrossRef]
- Zhang, Q.; He, K.; Huo, H. Policy: Cleaning China’s air. Nature 2012, 484, 161–162. [Google Scholar] [CrossRef]
- Bo, M.; Salizzoni, P.; Clerico, M.; Buccolieri, R. Assessment of Indoor-Outdoor Particulate Matter Air Pollution: A Review. Atmosphere 2017, 8, 136. [Google Scholar] [CrossRef]
- Zhong, Q.; Tao, S.; Ma, J.; Liu, J.; Shen, H.; Shen, G.; Guan, D.; Yun, X.; Meng, W.; Yu, X.; et al. PM2.5 reductions in Chinese cities from 2013 to 2019 remain significant despite the inflating effects of meteorological conditions. One Earth 2021, 4, 448–458. [Google Scholar] [CrossRef]
- Zhang, Q.; Jimenez, J.L.; Canagaratna, M.R.; Ulbrich, I.M.; Ng, N.L.; Worsnop, D.R.; Sun, Y. Understanding atmospheric organic aerosols via factor analysis of aerosol mass spectrometry: A review. Anal. Bioanal. Chem. 2011, 401, 3045–3067. [Google Scholar] [CrossRef] [PubMed]
- Steinle, S.; Reis, S.; Sabel, C.E. Quantifying human exposure to air pollution—Moving from static monitoring to spatio-temporally resolved personal exposure assessment. Sci. Total Environ. 2013, 443, 184–193. [Google Scholar] [CrossRef] [PubMed]
- Matthaios, V.N.; Kang, C.M.; Wolfson, J.M.; Greco, K.F.; Gaffin, J.M.; Hauptman, M.; Cunningham, A.; Petty, C.R.; Lawrence, J.; Phipatanakul, W.; et al. Factors Influencing Classroom Exposures to Fine Particles, Black Carbon, and Nitrogen Dioxide in Inner-City Schools and Their Implications for Indoor Air Quality. Environ. Health Perspect. 2022, 130, 047005. [Google Scholar] [CrossRef] [PubMed]
- DeCarlo, P.F.; Avery, A.M.; Waring, M.S. Thirdhand smoke uptake to aerosol particles in the indoor environment. Sci. Adv. 2018, 4, eaap8368. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.; Morawska, L.; Martani, C.; Biskos, G.; Neophytou, M.; Di Sabatino, S.; Bell, M.; Norford, L.; Britter, R. The rise of low-cost sensing for managing air pollution in cities. Environ. Int. 2015, 75, 199–205. [Google Scholar] [CrossRef]
- Kuula, J.; Mäkelä, T.; Hillamo, R.; Timonen, H. Response Characterization of an Inexpensive Aerosol Sensor. Sensors 2017, 17, 2915. [Google Scholar] [CrossRef] [PubMed]
- Sousan, S.; Koehler, K.; Thomas, G.; Park, J.H.; Hillman, M.; Halterman, A.; Peters, T.M. Inter-comparison of low-cost sensors for measuring the mass concentration of occupational aerosols. Aerosol Sci. Technol. 2016, 50, 462–473. [Google Scholar] [CrossRef]
- Clements, A.L.; Griswold, W.G.; RS, A.; Johnston, J.E.; Herting, M.M.; Thorson, J.; Collier-Oxandale, A.; Hannigan, M. Low-Cost Air Quality Monitoring Tools: From Research to Practice (A Workshop Summary). Sensors 2017, 17, 2478. [Google Scholar] [CrossRef]
- Lee, C.C.; Tran, M.-V.; Choo, C.W.; Tan, C.P.; Chiew, Y.S. Evaluation of air quality in Sunway City, Selangor, Malaysia from a mobile monitoring campaign using air pollution micro-sensors. Environ. Pollut. 2020, 265, 115058. [Google Scholar] [CrossRef]
- Wang, Y.; Du, Y.; Wang, J.; Li, T. Calibration of a low-cost PM2.5 monitor using a random forest model. Environ. Int. 2019, 133, 105161. [Google Scholar] [CrossRef] [PubMed]
- Bush, T.; Papaioannou, N.; Leach, F.; Pope, F.D.; Singh, A.; Thomas, G.N.; Stacey, B.; Bartington, S. Machine learning techniques to improve the field performance of low-cost air quality sensors. Atmos. Meas. Tech. 2022, 15, 3261–3278. [Google Scholar] [CrossRef]
- Gu, K.; Liu, H.; Xia, Z.; Qiao, J.; Lin, W.; Thalmann, D. PM2·5 Monitoring: Use Information Abundance Measurement and Wide and Deep Learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4278–4290. [Google Scholar] [CrossRef] [PubMed]
- Du, B.; Siegel, J.A. Estimating Indoor Pollutant Loss Using Mass Balances and Unsupervised Clustering to Recognize Decays. Environ. Sci. Technol. 2023, 57, 10030–10038. [Google Scholar] [CrossRef] [PubMed]
- Aix, M.L.; Schmitz, S.; Bicout, D.J. Calibration methodology of low-cost sensors for high-quality monitoring of fine particulate matter. Sci. Total Environ. 2023, 889, 164063. [Google Scholar] [CrossRef]
- Amoah, N.A.; Xu, G.; Kumar, A.R.; Wang, Y. Calibration of low-cost particulate matter sensors for coal dust monitoring. Sci. Total Environ. 2023, 859 Pt 2, 160336. [Google Scholar] [CrossRef]
- Bousiotis, D.; Alconcel, L.-N.S.; Beddows, D.C.; Harrison, R.M.; Pope, F.D. Monitoring and apportioning sources of indoor air quality using low-cost particulate matter sensors. Environ. Int. 2023, 174, 107907. [Google Scholar] [CrossRef]
- Báthory, C.; Dobó, Z.; Garami, A.; Palotás, Á.; Tóth, P. Low-cost monitoring of atmospheric PM-development and testing. J. Environ. Manag. 2022, 304, 114158. [Google Scholar] [CrossRef]
- Clougherty, J.E.; Kheirbek, I.; Eisl, H.M.; Ross, Z.; Pezeshki, G.; Gorczynski, J.E.; Johnson, S.C.; Markowitz, S.; Kass, D.; Matte, T.D. Intra-urban spatial variability in wintertime street-level concentrations of multiple combustion-related air pollutants: The New York City Community Air Survey (NYCCAS). J. Expo. Sci. Environ. Epidemiol. 2013, 23, 232–240. [Google Scholar] [CrossRef]
- Kelly, K.; Whitaker, J.; Petty, A.; Widmer, C.; Dybwad, A.; Sleeth, D.; Martin, R.; Butterfield, A. Ambient and laboratory evaluation of a low-cost particulate matter sensor. Environ. Pollut. 2017, 221, 491–500. [Google Scholar] [CrossRef]
- Zamora, M.L.; Xiong, F.; Gentner, D.R.; Kerkez, B.; Kohrman-Glaser, J.; Koehler, K. Field and Laboratory Evaluations of the Low-Cost Plantower Particulate Matter Sensor. Environ. Sci. Technol. 2018, 53, 838–849. [Google Scholar] [CrossRef]
- GB 3095-2012; Environmental Air Quality Standards. National Environmental Protection Administration of China: Beijing, China, 2012.
- Ping, L. How to understand the Air Quality Sub-index (IAQI) calculation formula and quick calculation. Heilongjiang Environ. J. 2014, 38, 25–27. [Google Scholar]
- Shi, J.; Chen, F.; Cai, Y.; Fan, S.; Cai, J.; Chen, R.; Kan, H.; Lu, Y.; Zhao, Z. Validation of a light-scattering PM2.5 sensor monitor based on the long-term gravimetric measurements in field tests. PLoS ONE 2017, 12, e0185700. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, X.; Chen, C.; Ge, Y.; Wang, W.; Zhao, Z.; Cai, J.; Kan, H. On-field test and data calibration of a low-cost sensor for fine particles exposure assessment. Ecotoxicol. Environ. Saf. 2021, 211, 111958. [Google Scholar] [CrossRef]
- Semple, S.; Ibrahim, A.E.; Apsley, A.; Steiner, M.; Turner, S. Using a new, low-cost air quality sensor to quantify second-hand smoke (SHS) levels in homes. Tob. Control 2015, 24, 153–158. [Google Scholar] [CrossRef] [PubMed]
- Yuchi, W.; Gombojav, E.; Boldbaatar, B.; Galsuren, J.; Enkhmaa, S.; Beejin, B.; Naidan, G.; Ochir, C.; Legtseg, B.; Byambaa, T.; et al. Evaluation of random forest regression and multiple linear regression for predicting indoor fine particulate matter concentrations in a highly polluted city. Environ. Pollut. 2019, 245, 746–753. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Xu, Z. Monitoring of PM2.5 Concentrations by Learning from Multi-Weather Sensors. Sensors 2020, 20, 6086. [Google Scholar] [CrossRef] [PubMed]
- Morawska, L.; Thai, P.K.; Liu, X.; Asumadu-Sakyi, A.; Ayoko, G.; Bartonova, A.; Bedini, A.; Chai, F.; Christensen, B.; Dunbabin, M.; et al. Applications of low-cost sensing technologies for air quality monitoring and exposure assessment: How far have they gone? Environ. Int. 2018, 116, 286–299. [Google Scholar] [CrossRef]
- Snyder, E.G.; Watkins, T.H.; Solomon, P.A.; Thoma, E.D.; Williams, R.W.; Hagler, G.S.; Shelow, D.; Hindin, D.A.; Kilaru, V.J.; Preuss, P.W. The Changing Paradigm of Air Pollution Monitoring. Environ. Sci. Technol. 2013, 47, 11369–11377. [Google Scholar] [CrossRef]
- Di Antonio, A.; Popoola, O.A.; Ouyang, B.; Saffell, J.; Jones, R.L. Developing a Relative Humidity Correction for Low-Cost Sensors Measuring Ambient Particulate Matter. Sensors 2018, 18, 2790. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Xu, F.; Gui, H.; Wang, H.; Chen, D.-R. Effect of relative humidity on the performance of five cost-effective PM sensors. Aerosol Sci. Technol. 2021, 55, 957–974. [Google Scholar] [CrossRef]
- Considine, E.M.; Reid, C.E.; Ogletree, M.R.; Dye, T. Improving accuracy of air pollution exposure measurements: Statistical correction of a municipal low-cost airborne particulate matter sensor network. Environ. Pollut. 2021, 268, 115833. [Google Scholar] [CrossRef] [PubMed]
- Chapizanis, D.; Karakitsios, S.; Gotti, A.; Sarigiannis, D.A. Assessing personal exposure using Agent Based Modelling informed by sensors technology. Environ. Res. 2021, 192, 110141. [Google Scholar] [CrossRef]
- Barkjohn, K.K.; Norris, C.; Cui, X.; Fang, L.; Zheng, T.; Schauer, J.J.; Li, Z.; Zhang, Y.; Black, M.; Zhang, J.; et al. Real-time measurements of PM2.5 and ozone to assess the effectiveness of residential indoor air filtration in Shanghai homes. Indoor Air 2021, 31, 74–87. [Google Scholar] [CrossRef]
- Rueda, E.M.; Carter, E.; L’orange, C.; Quinn, C.; Volckens, J. Size-Resolved Field Performance of Low-Cost Sensors for Particulate Matter Air Pollution. Environ. Sci. Technol. Lett. 2023, 10, 247–253. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Days (Sensors/TOEM) | PM2.5 (μg/m3) | PM10 (μg/m3) | |||||
|---|---|---|---|---|---|---|---|
| Sensors | TEOM | R2 | Sensors | TEOM | R2 | ||
| All year | 374/372 | 38.3 ± 25.6 * | 33.3 ± 23.6 | 0.79 | 45.4 ± 29.5 * | 54.7 ± 38.4 | 0.26 |
| (0.0~180.6) | (1~211.0) | (0.5~210.3) | (0.0~493.0) | ||||
| Spring (1 March–30 May) | 92/91 | 43.4 ± 22.5 * | 35.0 ± 20.5 | 0.69 | 52.3 ± 25.9 * | 60.6 ± 45.7 | 0.04 |
| (3.5~172.8) | (1.0~142.0) | (4.3~191.6) | (0.0~493.0) | ||||
| Summer (1 June–31 August) | 89/90 | 25.3 ± 15.7 * | 21.1 ± 12.6 | 0.72 | 30.1 ± 19.4 * | 38.8 ± 18.2 | 0.22 |
| (0.7~87.9) | (1.0~95.0) | (1.7~104.7) | (0.00~111.0) | ||||
| Autumn (1 September–30 November) | 91/89 | 29.4 ± 20.2 | 29.0 ± 18.4 | 0.73 | 34.8 ± 23.6 * | 56.3 ± 31.4 | 0.41 |
| (0.0~113.2) | (1.0~146.0) | (0.0~124.6) | (0.0~323.0) | ||||
| Winter (1 December–28 February) | 102/101 | 52.8 ± 30.1 * | 46.2 ± 30.1 | 0.80 | 62.1 ± 33.6 | 60.9 ± 37.8 | 0.42 |
| (2.5~180.6) | (2.0~211.0) | (3.3~210.3) | (0.0~363.0) | ||||
| PM2.5 (μg/m3) | PM10 (μg/m3) | |||||||
|---|---|---|---|---|---|---|---|---|
| Indoor Sources | Measurement Time | Sensors | TSI | R2 | Sensors | TSI | R2 | |
| Office | No obvious emission sources | 60 days | 17.6 ± 13.3 * | 19.9 ± 14.3 | 0.66 | 20.4 ± 16.0 * | 27.1 ± 18.8 | 0.64 |
| (0.3~58.9) | (0.8~91.5) | (0.4~71.8) | (1.9~236.6) | |||||
| Residence | Mosquito-repellent | 130 min | 67.4 ± 55.9 * | 83.5 ± 82.9 | 0.98 | 73.6 ± 56.2 * | 107.5 ± 105.0 | 0.98 |
| (25.5~222.7) | (25.1~305.3) | (28.3~229.8) | (33.0~388.1) | |||||
| Worship incense | 110 min | 34.1 ± 42.7 * | 58.7 ± 76.9 | 0.98 | 37.3 ± 44.7 * | 77.2 ± 98.6 | 0.97 | |
| (2.7~139.2) | (8.5~254.7) | (3.8~145.0) | (11.2~328.2) | |||||
| Candle | 115 min | 23.8 ± 12.0 * | 27.5 ± 14.5 | 0.96 | 28.6 ± 16.0 * | 38.5 ± 18.7 | 0.97 | |
| (10.5~73.3) | (16.5~87.2) | (12.7~88.5) | (22.8~113.7) | |||||
| Cooking | 150 min | 27.7 ± 28.5 * | 47.1 ± 60.0 | 0.98 | 36.3 ± 40.0 * | 66.1 ± 84.0 | 0.98 | |
| (8.7~150.7) | (14.2~327.5) | (10.3~212.2) | (19.7~465.2) | |||||
| Smoking | 151 min | 58.3 ± 63.0 * | 62.4 ± 66.9 | 0.99 | 82.8 ± 84.6 * | 65.0 ± 66.4 | 0.97 | |
| (10.0~308.2) | (19.5~370.7) | (27.7~471.6) | (11.2~326.3) | |||||
| References | Particles | NM | ML | SVM | MLP | DT | KNN | RF | |
|---|---|---|---|---|---|---|---|---|---|
| Outdoor (hourly averages) | TEOM | PM2.5 | 0.79 | 0.82 | 0.85 | 0.84 | 0.84 | 0.83 | 0.90 |
| TEOM | PM10 | 0.26 | 0.33 | 0.23 | 0.41 | 0.59 | 0.76 | 0.80 | |
| Indoor (minutely averages) | TSI | PM2.5 | 0.66 | 0.84 | 0.85 | 0.90 | 0.95 | 0.93 | 0.97 |
| TSI | PM10 | 0.64 | 0.77 | 0.77 | 0.80 | 0.85 | 0.84 | 0.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, H.; Cai, Y.; Gao, S.; Sun, J.; Ning, Z.; Yu, Z.; Pan, J.; Zhao, Z. Multi-Scenario Validation and Assessment of a Particulate Matter Sensor Monitor Optimized by Machine Learning Methods. Sensors 2024, 24, 3448. https://doi.org/10.3390/s24113448
Tang H, Cai Y, Gao S, Sun J, Ning Z, Yu Z, Pan J, Zhao Z. Multi-Scenario Validation and Assessment of a Particulate Matter Sensor Monitor Optimized by Machine Learning Methods. Sensors. 2024; 24(11):3448. https://doi.org/10.3390/s24113448
Chicago/Turabian StyleTang, Hao, Yunfei Cai, Song Gao, Jin Sun, Zhukai Ning, Zhenghao Yu, Jun Pan, and Zhuohui Zhao. 2024. "Multi-Scenario Validation and Assessment of a Particulate Matter Sensor Monitor Optimized by Machine Learning Methods" Sensors 24, no. 11: 3448. https://doi.org/10.3390/s24113448