
Investigation of Motor Learning Effects Using a Hybrid Rehabilitation System Based on Motion Estimation †

Abstract
:1. Introduction
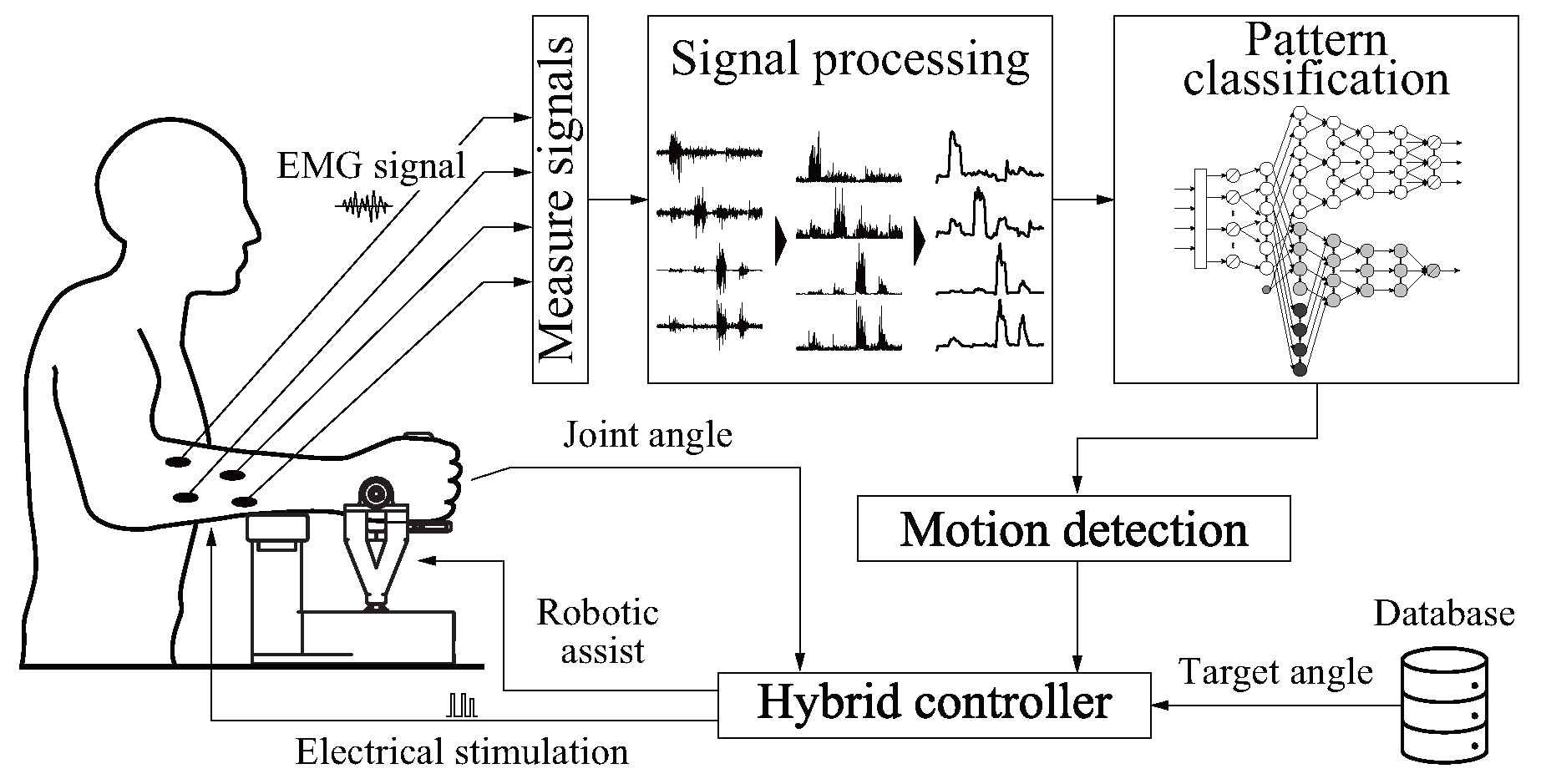
2. Hybrid Rehabilitation System with Motion Estimation [16]
2.1. Hardware
2.2. Software
2.2.1. Signal Processing and Feature Extraction
2.2.2. Motion Estimation
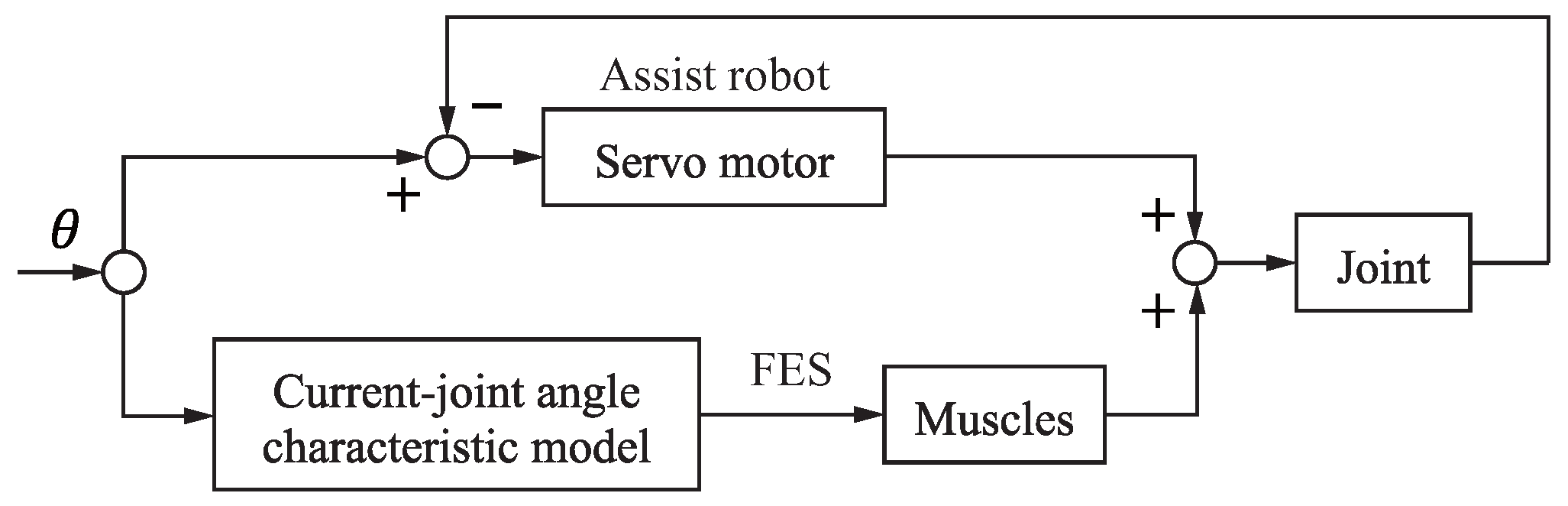
2.2.3. Robot Control
2.2.4. Stimulation Level Calculation
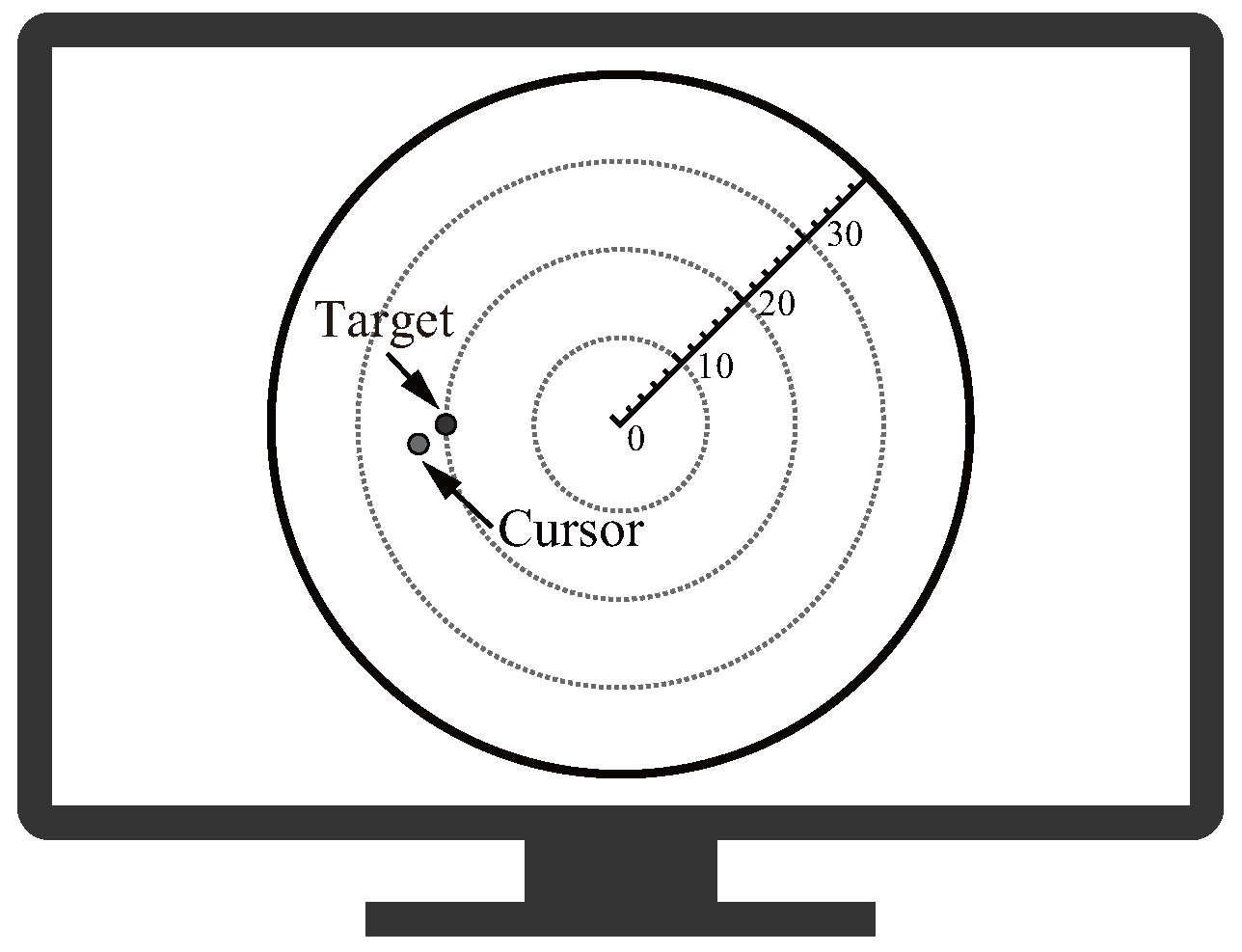
3. Pointing Evaluation
- Endpoint error: e
- Maximum lateral deviation:
- Endpoint standard deviation: s
- Orbit correlation coefficient:
- Jerk cost:
- Normalized mean velocity:
4. Experiment
4.1. Conditions
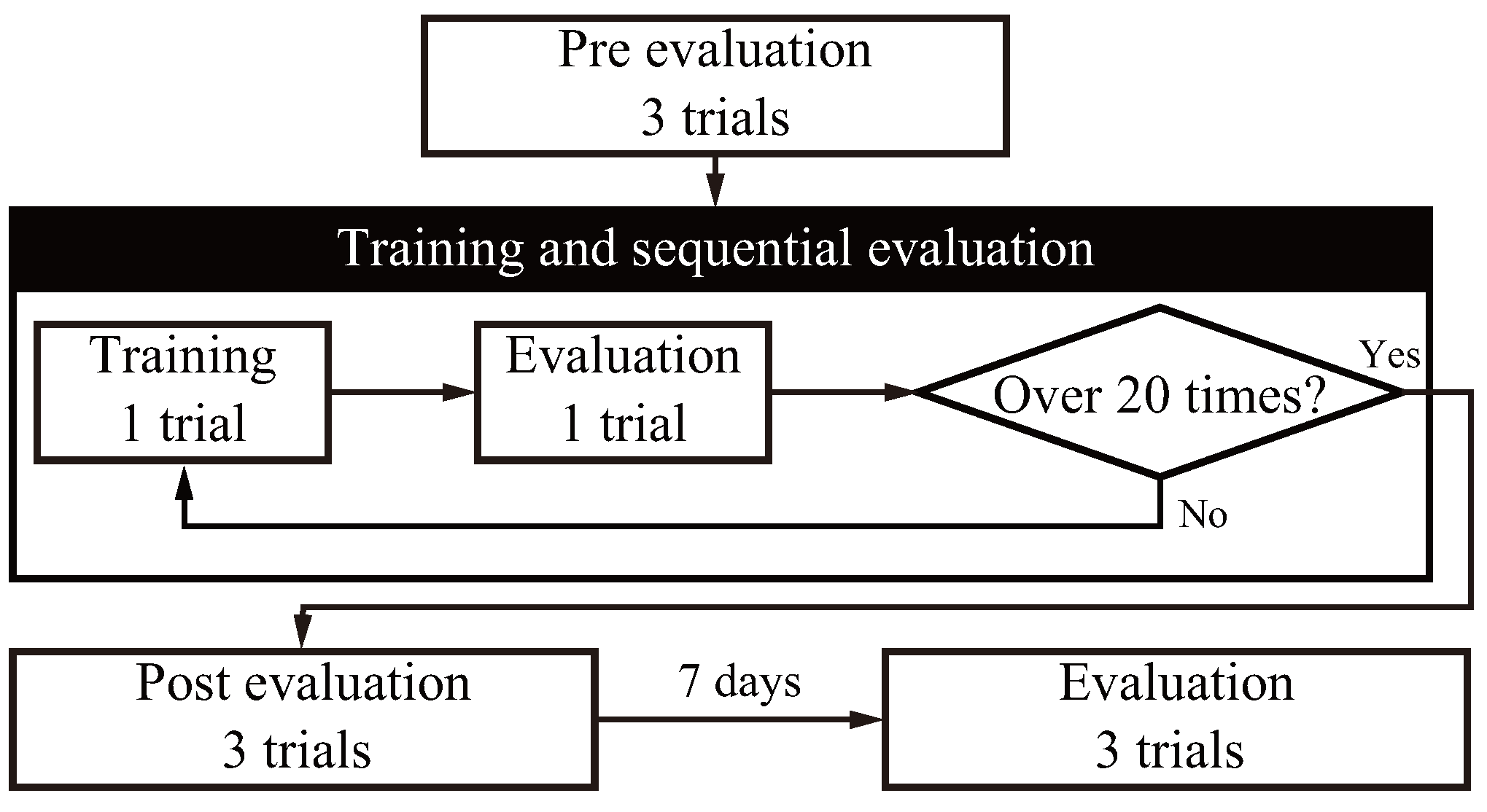
4.2. Method
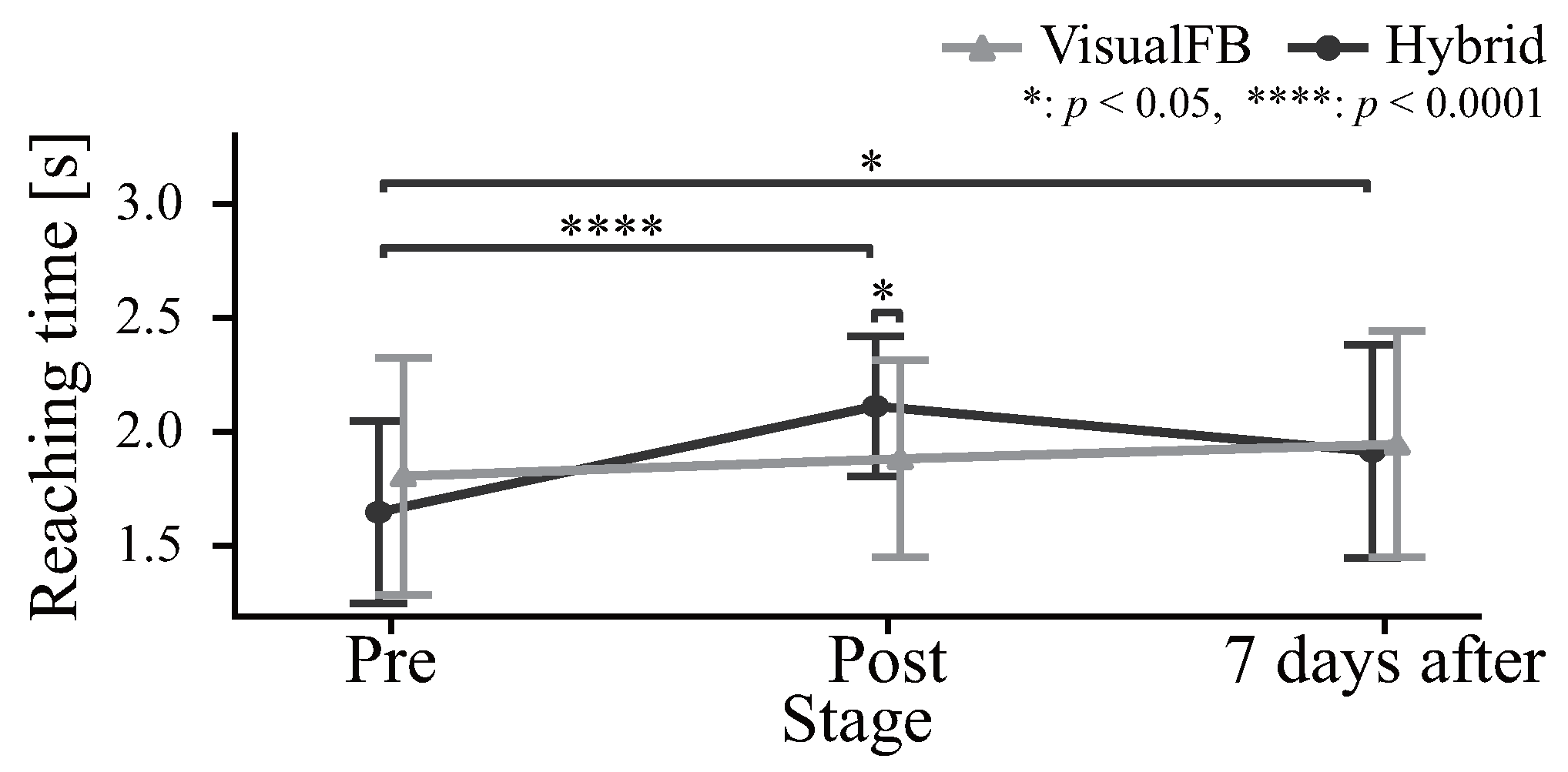
4.3. Results
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Langhorne, P.; Bernhardt, J.; Kwakkel, G. Stroke Rehabilitation. Lancet 2011, 377, 1693–1702. [Google Scholar] [CrossRef] [PubMed]
- Pollock, A.; Farmer, S.E.; Brady, M.C.; Langhorne, P.; Mead, G.E.; Mehrholz, J.; van Wijck, F. Interventions for Improving Upper Limb Function after Stroke. Cochrane Database Syst. Rev. 2014, 11, CD010820. [Google Scholar] [CrossRef] [PubMed]
- Hatem, S.M.; Saussez, G.; della Faille, M.; Prist, V.; Zhang, X.; Dispa, D.; Bleyenheuft, Y. Rehabilitation of Motor Function after Stroke: A Multiple Systematic Review Focused on Techniques to Stimulate Upper Extremity Recovery. Front. Hum. Neurosci. 2016, 10, 442. [Google Scholar] [CrossRef] [PubMed]
- Veerbeek, J.M.; Langbroek-Amersfoort, A.C.; van Wegen, E.E.H.; Meskers, C.G.M.; Kwakkel, G. Effects of Robot-Assisted Therapy for the Upper Limb After Stroke: A Systematic Review and Meta-analysis. Neurorehabilit. Neural Repair 2017, 31, 107–121. [Google Scholar] [CrossRef] [PubMed]
- Qassim, H.M.; Wan Hasan, W.Z. A Review on Upper Limb Rehabilitation Robots. Appl. Sci. 2020, 10, 6976. [Google Scholar] [CrossRef]
- Frisoli, A.; Procopio, C.; Chisari, C.; Creatini, I.; Bonfiglio, L.; Bergamasco, M.; Rossi, B.; Carboncini, M.C. Positive Effects of Robotic Exoskeleton Training of Upper Limb Reaching Movements after Stroke. J. Neuroeng. Rehabil. 2012, 9, 36. [Google Scholar] [CrossRef] [PubMed]
- Lum, P.S.; Burgar, C.G.; Shor, P.C.; Majmundar, M.; Van der Loos, M. Robot-Assisted Movement Training Compared with Conventional Therapy Techniques for the Rehabilitation of Upper-Limb Motor Function after Stroke. Arch. Phys. Med. Rehabil. 2002, 83, 952–959. [Google Scholar] [CrossRef]
- Peckham, P.H.; Knutson, J.S. Functional Electrical Stimulation for Neuromuscular Applications. Annu. Rev. Biomed. Eng. 2005, 7, 327–360. [Google Scholar] [CrossRef]
- Chan, M.K.l.; Tong, R.K.y.; Chung, K.Y.k. Bilateral Upper Limb Training with Functional Electric Stimulation in Patients with Chronic Stroke. Neurorehabilit. Neural Repair 2009, 23, 357–365. [Google Scholar] [CrossRef]
- Shima, K.; Shimatani, K. A New Approach to Direct Rehabilitation Based on Functional Electrical Stimulation and EMG Classification. In Proceedings of the 2016 International Symposium on Micro-NanoMechatronics and Human Science (MHS), Nagoya, Japan, 28–30 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Resquín, F.; Cuesta Gómez, A.; Gonzalez-Vargas, J.; Brunetti, F.; Torricelli, D.; Molina Rueda, F.; Cano de la Cuerda, R.; Miangolarra, J.C.; Pons, J.L. Hybrid Robotic Systems for Upper Limb Rehabilitation after Stroke: A Review. Med. Eng. Phys. 2016, 38, 1279–1288. [Google Scholar] [CrossRef]
- Stewart, A.M.; Pretty, C.G.; Adams, M.; Chen, X. Review of Upper Limb Hybrid Exoskeletons. IFAC-PapersOnLine 2017, 50, 15169–15178. [Google Scholar] [CrossRef]
- Nam, C.; Rong, W.; Li, W.; Cheung, C.; Ngai, W.; Cheung, T.; Pang, M.; Li, L.; Hu, J.; Wai, H.; et al. An Exoneuromusculoskeleton for Self-Help Upper Limb Rehabilitation After Stroke. Soft Robot. 2022, 9, 14–35. [Google Scholar] [CrossRef] [PubMed]
- Bolton, D.a.E.; Cauraugh, J.H.; Hausenblas, H.A. Electromyogram-Triggered Neuromuscular Stimulation and Stroke Motor Recovery of Arm/Hand Functions: A Meta-Analysis. J. Neurol. Sci. 2004, 223, 121–127. [Google Scholar] [CrossRef] [PubMed]
- Huo, Y.; Wang, X.; Zhao, W.; Hu, H.; Li, L. Effects of EMG-based Robot for Upper Extremity Rehabilitation on Post-Stroke Patients: A Systematic Review and Meta-Analysis. Front. Physiol. 2023, 14, 1172958. [Google Scholar] [CrossRef] [PubMed]
- Takenaka, K.; Shima, K.; Shimatani, K. Hybrid Rehabilitation System with Motion Estimation Based on EMG Signals. In Proceedings of the 2023 International Conference on Rehabilitation Robotics (ICORR), Singapore, 24–28 September 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Fukuda, O.; Tsuji, T.; Kaneko, M.; Otsuka, A. A Human-Assisting Manipulator Teleoperated by EMG Signals and Arm Motions. IEEE Trans. Robot. Autom. 2003, 19, 210–222. [Google Scholar] [CrossRef]
- Furui, A.; Eto, S.; Nakagaki, K.; Shimada, K.; Nakamura, G.; Masuda, A.; Chin, T.; Tsuji, T. A Myoelectric Prosthetic Hand with Muscle Synergy–Based Motion Determination and Impedance Model–Based Biomimetic Control. Sci. Robot. 2019, 4, eaaw6339. [Google Scholar] [CrossRef] [PubMed]
- Hayashi, H.; Shibanoki, T.; Tsuji, T. A Neural Network Based on the Johnson SU Translation System and Related Application to Electromyogram Classification. IEEE Access 2021, 9, 154304–154317. [Google Scholar] [CrossRef]
- Tsuji, T.; Bu, N.; Fukuda, O.; Kaneko, M. A Recurrent Log-Linearized Gaussian Mixture Network. IEEE Trans. Neural Netw. 2003, 14, 304–316. [Google Scholar] [CrossRef]
- Loureiro, R.; Amirabdollahian, F.; Topping, M.; Driessen, B.; Harwin, W. Upper Limb Robot Mediated Stroke Therapy-GENTLE/s Approach. Auton. Robot. 2003, 15, 35–51. [Google Scholar] [CrossRef]
- Rohrer, B.; Fasoli, S.; Krebs, H.I.; Hughes, R.; Volpe, B.; Frontera, W.R.; Stein, J.; Hogan, N. Movement Smoothness Changes during Stroke Recovery. J. Neurosci. 2002, 22, 8297–8304. [Google Scholar] [CrossRef]
- Bu, N.; Fukuda, O.; Tsuji, T. EMG-Based Motion Discrimination Using a Novel Recurrent Neural Network. J. Intell. Inf. Syst. 2003, 21, 113–126. [Google Scholar] [CrossRef]
- Salmoni, A.; Schmidt, R.; Walter, C. Knowledge of Results and Motor Learning—A Review and Critical Reappraisal. Psychol. Bull. 1984, 95, 355–386. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Visual Feedback [%] | Hybrid (Proposed) [%] | p | ||
|---|---|---|---|---|---|
| Mean | SD | Mean | SD | ||
| Endpoint error e | 40.86 | 21.02 | 59.88 | 18.42 | <0.001 *** |
| Maximum lateral deviation | 26.20 | 49.42 | 19.95 | 42.66 | 0.519 |
| Endpoint standard deviation s | 3.96 | 44.61 | 39.87 | 26.98 | 0.006 ** |
| Orbit correlation coefficient | 0.85 | 1.13 | 1.39 | 1.04 | 0.051 |
| Jerk cost | 28.31 | 84.61 | 18.66 | 68.23 | 0.136 |
| Normalized mean velocity | 15.22 | 23.34 | 29.38 | 28.21 | 0.093 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takenaka, K.; Shima, K.; Shimatani, K. Investigation of Motor Learning Effects Using a Hybrid Rehabilitation System Based on Motion Estimation. Sensors 2024, 24, 3496. https://doi.org/10.3390/s24113496
Takenaka K, Shima K, Shimatani K. Investigation of Motor Learning Effects Using a Hybrid Rehabilitation System Based on Motion Estimation. Sensors. 2024; 24(11):3496. https://doi.org/10.3390/s24113496
Chicago/Turabian StyleTakenaka, Kensuke, Keisuke Shima, and Koji Shimatani. 2024. "Investigation of Motor Learning Effects Using a Hybrid Rehabilitation System Based on Motion Estimation" Sensors 24, no. 11: 3496. https://doi.org/10.3390/s24113496