
Probabilistic Method to Fuse Artificial Intelligence-Generated Underground Utility Mapping

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. AI-Generated Utility Map
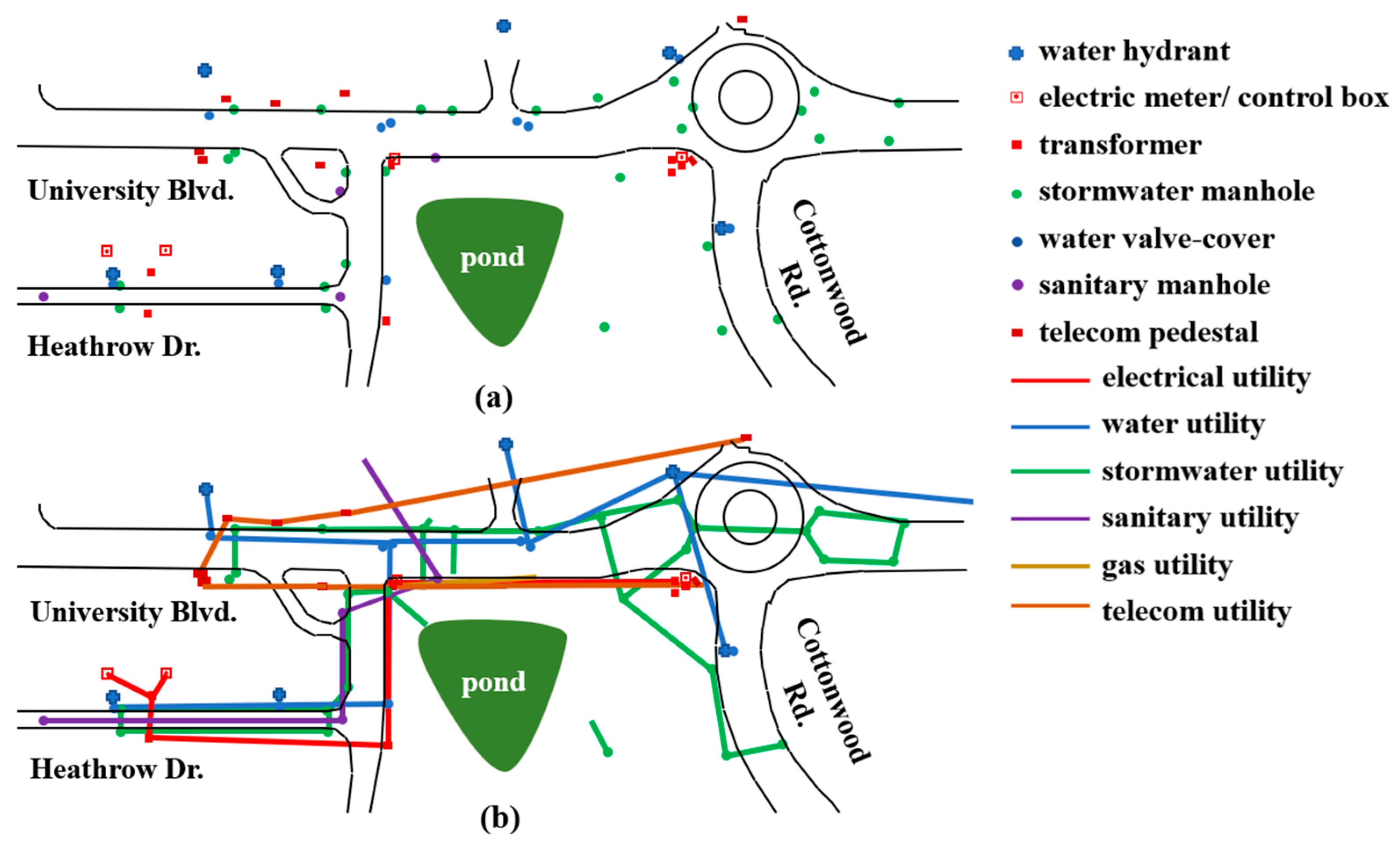
2.1. Selected Site and Available As-Built Map
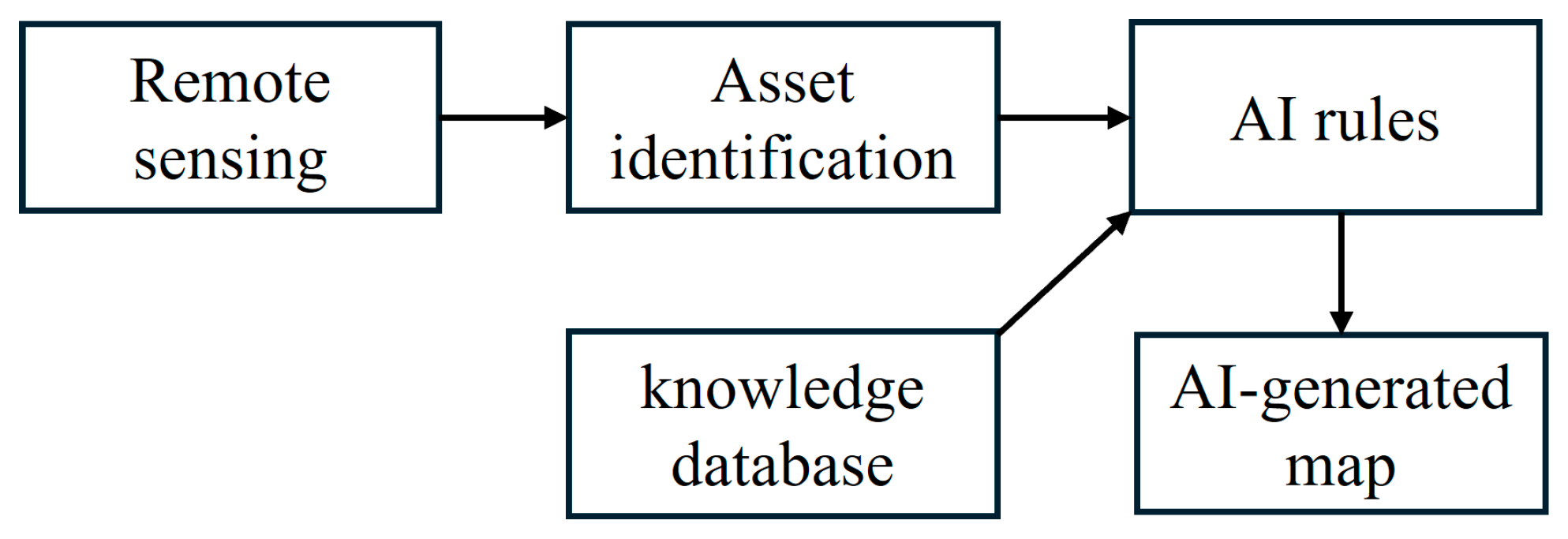
2.2. AI-Generated Utility Map
3. Utility Location Data Fusion
3.1. Process
3.2. Factors Affecting Confidence
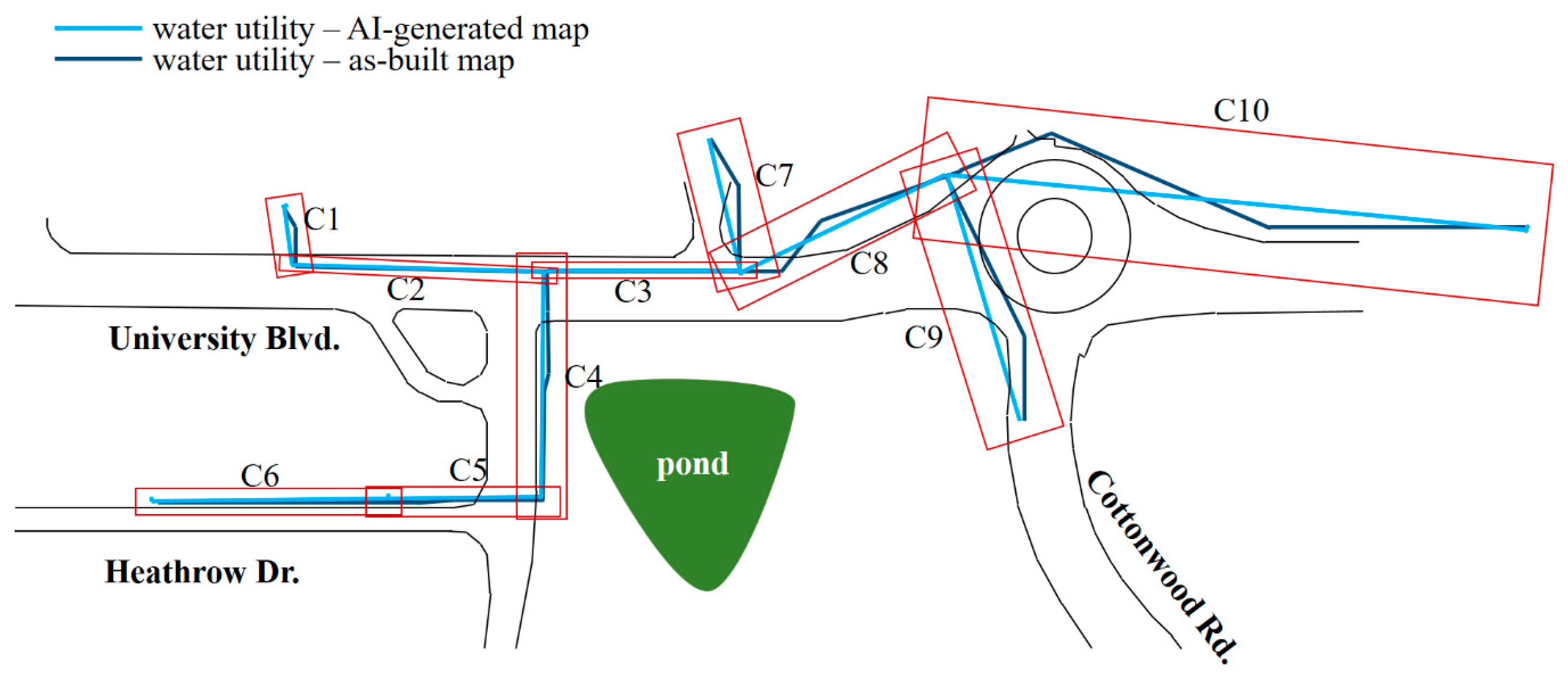
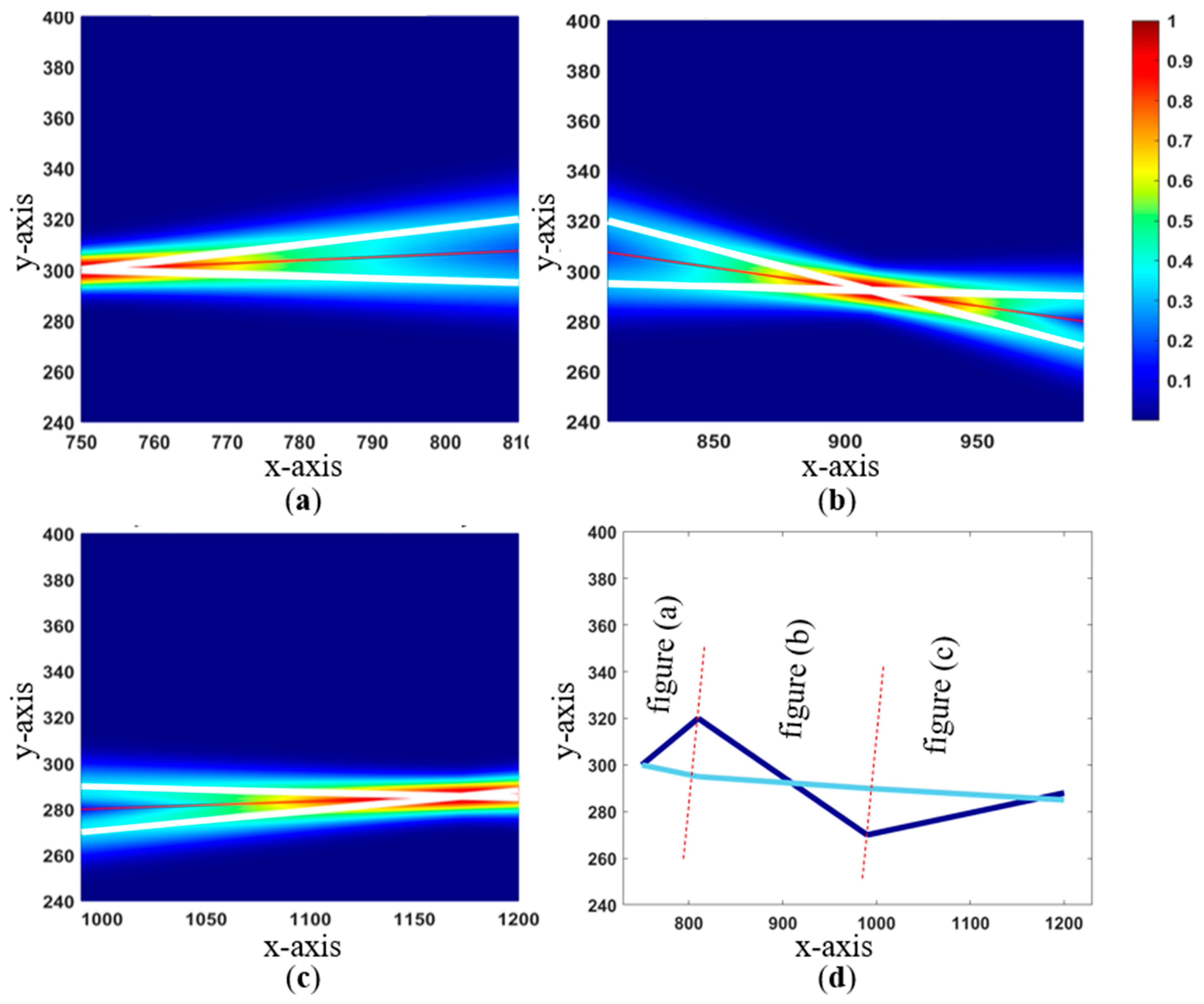
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Metje, N.; Ahmad, B.; Crossland, S.M. Causes, impacts and costs of strikes on buried utility assets. Proc. Inst. Civ. Eng.—Munic. Eng. 2015, 168, 165–174. [Google Scholar] [CrossRef]
- Common Ground Alliance (CGA). Damage Information Reporting Tool 2021 Analysis and Recommendations. Available online: https://commongroundalliance.com/Portals/0/2020%20DIRT%20Report_09.29.2021_Final4.pdf?ver=2021-11-03-143123-490 (accessed on 15 October 2022).
- Hao, T.; Rogers, C.D.F.; Metje, N.; Chapman, D.N.; Muggleton, J.M.; Foo, K.Y.; Wang, P.; Pennock, S.R.; Atkins, P.R.; Swingler, S.G.; et al. Condition assessment of the buried utility service infrastructure. Tunn. Undergr. Space Technol. 2012, 28, 331–344. [Google Scholar] [CrossRef]
- Al-Bayati, A.J.; Panzer, L. Reducing damage to underground utilities: Lessons learned from damage data and excavators in North Carolina. J. Constr. Eng. Manag. 2019, 145, 04019078. [Google Scholar] [CrossRef]
- Dou, Q.; Lin, Z.; Magee, D.R.; Cohn, A.G. 3D mapping from partial observations: An application to utility mapping. Autom. Constr. 2020, 117, 103229. [Google Scholar] [CrossRef]
- Al-Bayati, A.J.; Panzer, L.; Karakhan, A. Reducing Damages to Underground Infrastructure: Performance Evaluation of One-Call Notification Program. Pract. Period. Struct. Des. Constr. 2019, 24, 04019018. [Google Scholar] [CrossRef]
- Chahinian, N.; Delenne, C.; Commandré, B.; Derras, M.; Deruelle, L.; Bailly, J.-S. Automatic mapping of urban wastewater networks based on manhole cover locations. Comput. Environ. Urban Syst. 2019, 78, 101370. [Google Scholar] [CrossRef]
- Lanka, M.; Butler, A.; Sterling, R. Use of approximate reasoning techniques for locating underground utilities. Tunn. Undergr. Space Technol. 2001, 16, 13–31. [Google Scholar] [CrossRef]
- Hassan, H.T.; Akhtar, M.F. Mapping of Power Distribution Network using Geographical Information System (G.I.S.). Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 343–347. [Google Scholar]
- Lu, Q.; Pu, J.; Liu, Z. Feature extraction and automatic material classification of underground objects from ground penetrating radar data. J. Electr. Comput. Eng. 2014, 2014, 28. [Google Scholar] [CrossRef]
- Jeong, H.; Arboleda, C.; Abraham, D. Imaging and Locating Buried Utilities; FHWA/IN/JTRP-2003/12; Purdue University: West Lafayette, IN, USA, 2003; p. 2451. [Google Scholar]
- Oguntoye, K.S.; Laflamme, S.; Sturgill, R.; Eisenmann, D.J. Review of Artificial Intelligence Applications for Virtual Sensing of Underground Utilities. Sensors 2023, 23, 4367. [Google Scholar] [CrossRef] [PubMed]
- Osman, H.M.; El-Diraby, T.E. Knowledge-Enabled Decision Support System for Routing Urban Utilities. J. Constr. Eng. Manag. 2011, 137, 198–213. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, H.; Li, J. Probabilistic Mixture Model for Mapping the Underground Pipes. A.C.M. Trans. Knowl. Discov. Data 2019, 13, 1–26. [Google Scholar] [CrossRef]
- Chen, H.; Cohn, A.G. Buried Utility Pipeline Mapping Based on Multiple Spatial Data Sources: A Bayesian Data Fusion Approach. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Barcelona, Spain, 16–22 July 2011; p. 7. [Google Scholar]
- Li, S.; Cai, H.; Kamat, V.R. Uncertainty-aware geospatial system for mapping and visualizing underground utilities. Autom. Constr. 2015, 53, 105–119. [Google Scholar] [CrossRef]
- Bilal, M.; Khan, W.; Muggleton, J.; Rustighi, E.; Jenks, H.; Pennock, S.R.; Atkins, P.R.; Cohn, A. Inferring the most probable maps of underground utilities using Bayesian mapping model. J. Appl. Geophys. 2018, 150, 52–66. [Google Scholar] [CrossRef]
- Cai, J.; Jeon, J.; Cai, H.; Li, S. Fusing Heterogeneous Information for Underground Utility Map Generation Based on Dempster-Shafer Theory. J. Comput. Civ. Eng. 2020, 34, 04020013. [Google Scholar] [CrossRef]
- Dong, X.L.; Gabrilovich, E.; Heitz, G.; Horn, W.; Murphy, K.; Sun, S.; Zhang, W. From Data Fusion to Knowledge Fusion. arXiv 2015, arXiv:1503.00302. [Google Scholar] [CrossRef]
- Highway/Utility Guide. Available online: https://www.fhwa.dot.gov/utilities/010604.pdf (accessed on 20 December 2022).
- Metje, N.; Atkins, P.R.; Brennan, M.J.; Chapman, D.N.; Lim, H.M.; Machell, J.; Muggleton, J.M.; Pennock, S.; Ratcliffe, J.; Redfern, M.; et al. Mapping the Underworld—State-of-the-art review. Tunn. Undergr. Space Technol. 2007, 22, 568–586. [Google Scholar] [CrossRef]
- What Else Is Down There?|Proceedings|Vol No. Available online: https://ascelibrary.org/doi/abs/10.1061/9780784485033.052 (accessed on 1 March 2024).
- Al-Bayati, A.J.; Kinter, A. Subsurface Utility Engineering in Practice: Scope of Service Focus. In Pipelines; American Society of Civil Engineers: Reston, VA, USA, 2022; pp. 166–170. [Google Scholar] [CrossRef]
- Li, S.; Cai, H.; Kamat, V.R. Integrating Natural Language Processing and Spatial Reasoning for Utility Compliance Checking. J. Constr. Eng. Manag. 2016, 142, 04016074. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Utility | Appurtenances | Locations |
|---|---|---|
| Electricity | 1, 2, 3, 4, 5, 6, 15, 17 | sidewalk, property line, and toward buildings |
| Sewerage | 3, 7, 9, 17 | sidewalk, property line, and toward buildings |
| Stormwater | 3, 6, 8, 17 | along the road/right of way |
| Telecom | 1, 2, 3, 5, 6, 10, 11, 17 | sidewalk, property line, along the road/right of way |
| Water | 3, 12, 13, 16, 17 | sidewalk and toward buildings |
| Natural gas | 6, 13, 14, 17 | sidewalk and toward buildings |
| Rule Group | Ranking | Rules |
|---|---|---|
| Class: Water Utility | ||
| Proximity | 1 | Connect valve covers in close proximity. |
| 2 | Connect water hydrants to valve covers. | |
| 3 | Connect water hydrants along the same lane or on the opposite side of the road in the absence of valve covers. | |
| 4 | Remove redundant utility connection in the event of possible closed-circuit connections. | |
| Roadway | 5 | Connect main utility longitudinally along the roadway. |
| Downstream feed | 6 | Connect chillers directly to neighboring buildings. |
| 7 | Connect nearby water-meter manhole and/or shut-off valve directly to the main utility line for utility service connections to buildings. | |
| Class: Electricity utility | ||
| Proximity | 1 | Connect transformer to nearby electric meters, pedestals, and control boxes. |
| 2 | Connect two transformers in close proximity. | |
| 3 | Connect transformer to any outdoor-laid electrical appliances such as a cooling fan. | |
| 4 | Connect light poles in close proximity. | |
| Class: Stormwater utility | ||
| Proximity | 1 | Connect two manholes in close proximity found on the opposite or the same side of the roadway. |
| 2 | Connect only two manholes with the shortest distance and an agreeing slope in the presence of multiple manholes. | |
| 3 | Remove redundant utility connection in the event of possible closed-circuit connections. | |
| Roadway | 4 | Connect utility in the direction of roadway. |
| Downstream feed | 5 | Connect a manhole directly to the nearest outfall. |
| 6 | Connect manholes directly to nearby lake, river or ponds. | |
| Class: Sanitary utility | ||
| Proximity | 1 | Connect two manholes in close proximity found on the opposite or the same side of the roadway. |
| 2 | Connect only two manholes with the shortest distance and an agreeing slope in the presence of multiple manholes. | |
| 3 | Remove redundant utility connection in the event of possible closed-circuit connections. | |
| Roadway | 4 | Connect main utility longitudinally along the roadway. |
| Downstream feed | 5 | Connect manholes to neighboring buildings. |
| Class: Telecom utility | ||
| Proximity | 1 | Connect two manholes in close proximity found on the opposite or the same side of the roadway. |
| 2 | Connect two pedestals (cabinets) in close proximity found on the opposite or the same side of the roadway. | |
| Class: Gas utility | ||
| Proximity | 1 | Connect two valve covers in close proximity found on the opposite or the same side of the roadway. |
| 2 | Connect valve covers to nearby gas meter. | |
| 3 | Connect a reducing station to any nearby gas meter. | |
| 4 | Connect meters with the shortest distance in the presence of multiple gas meters. | |
| Knowledge Source | Factor |
|---|---|
| As-built map | Map age Construction activities Consistency with observed aboveground asset Validation recency |
| AI-generated utility map | Asset coordinates precision Assets accessibility Linearity assumption obstacles Utility rule compliance |
| Extended survey | Recency Mode limitations: (GPR, manhole search, other sensors) Flags and colored markings accuracy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oguntoye, K.S.; Laflamme, S.; Sturgill, R.; Salazar Martinez, D.A.; Eisenmann, D.J.; Kimber, A. Probabilistic Method to Fuse Artificial Intelligence-Generated Underground Utility Mapping. Sensors 2024, 24, 3559. https://doi.org/10.3390/s24113559
Oguntoye KS, Laflamme S, Sturgill R, Salazar Martinez DA, Eisenmann DJ, Kimber A. Probabilistic Method to Fuse Artificial Intelligence-Generated Underground Utility Mapping. Sensors. 2024; 24(11):3559. https://doi.org/10.3390/s24113559
Chicago/Turabian StyleOguntoye, Kunle Sunday, Simon Laflamme, Roy Sturgill, Daniel A. Salazar Martinez, David J. Eisenmann, and Anne Kimber. 2024. "Probabilistic Method to Fuse Artificial Intelligence-Generated Underground Utility Mapping" Sensors 24, no. 11: 3559. https://doi.org/10.3390/s24113559
APA StyleOguntoye, K. S., Laflamme, S., Sturgill, R., Salazar Martinez, D. A., Eisenmann, D. J., & Kimber, A. (2024). Probabilistic Method to Fuse Artificial Intelligence-Generated Underground Utility Mapping. Sensors, 24(11), 3559. https://doi.org/10.3390/s24113559