
Robust Output Feedback Stabilization and Tracking for an Uncertain Nonholonomic Systems with Application to a Mobile Robot
 , , ,
, , ,  ,
,  , and
, and 
Abstract
:1. Introduction
- Introduction of a Generalized Normal Form: We propose a novel normal form representation for underactuated nonholonomic systems that can handle both kinematic and dynamic model uncertainties as well as external disturbances.
- Novel Recursive Backstepping Sliding Mode Control (BSMC): To tackle the challenges of stabilizing nonholonomic systems, we develop a recursive backstepping SMC technique that ensures asymptotic stabilization of both external and internal dynamics. This method provides a unified solution for both trajectory tracking and stabilization problems while being robust to bounded parameter uncertainties and external disturbances.
- Output Feedback Control with High Gain Observer (HGO): We design an output feedback control that employs a full-order HGO to estimate the derivative of the output function and velocity components without sensors, even in the presence of bounded uncertainties. This method achieves comparable performance to full-state feedback control.
- Application to Wheeled Mobile Robots: The theoretical development is applied to the case of wheeled mobile robots, demonstrating the broad applicability of the proposed control approach to a typical benchmark problem in nonholonomic dynamic systems.
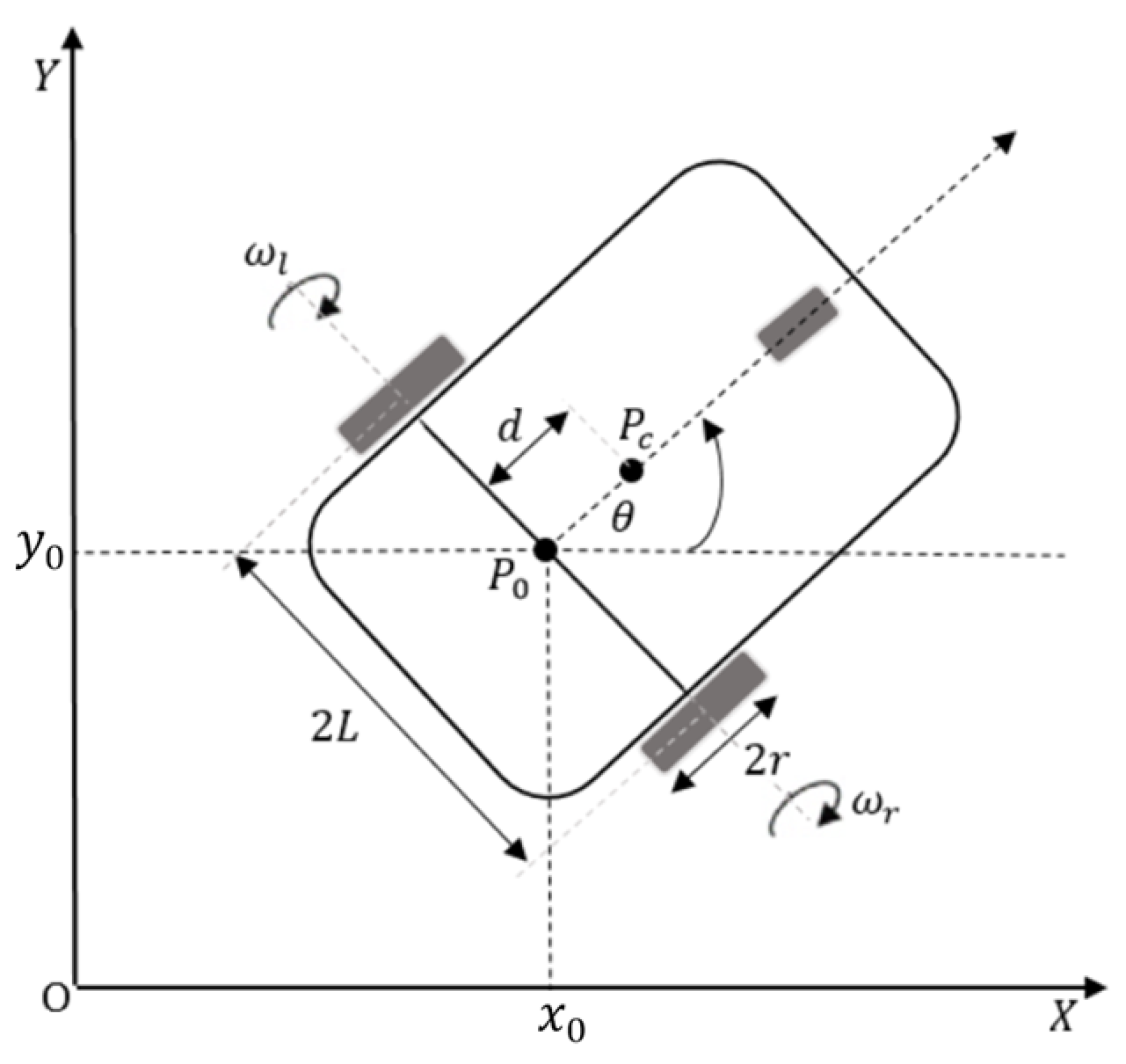
2. Kinematic and Dynamic Modeling for an Uncertain Nonholonomic System
3. Input–Output Feedback Linearization
- 1.
- The proposed normal form has a nontriangular structure.
- 2.
- Internal dynamics of the system is non-affine in control, i.e., highly nonlinear.
- 3.
- The zero dynamics of the system is not minimum phase.
4. Trajectory Tracking Controller
- where tracking errors are described as
- Step 1: Backstepping SMC for Subsystem
- Step 2: Backstepping SMC for Subsystem
5. Backstepping SMC for Stabilization
6. Output Feedback Control
7. Design Example: Differential Drive WMR
7.1. Problem Formulation
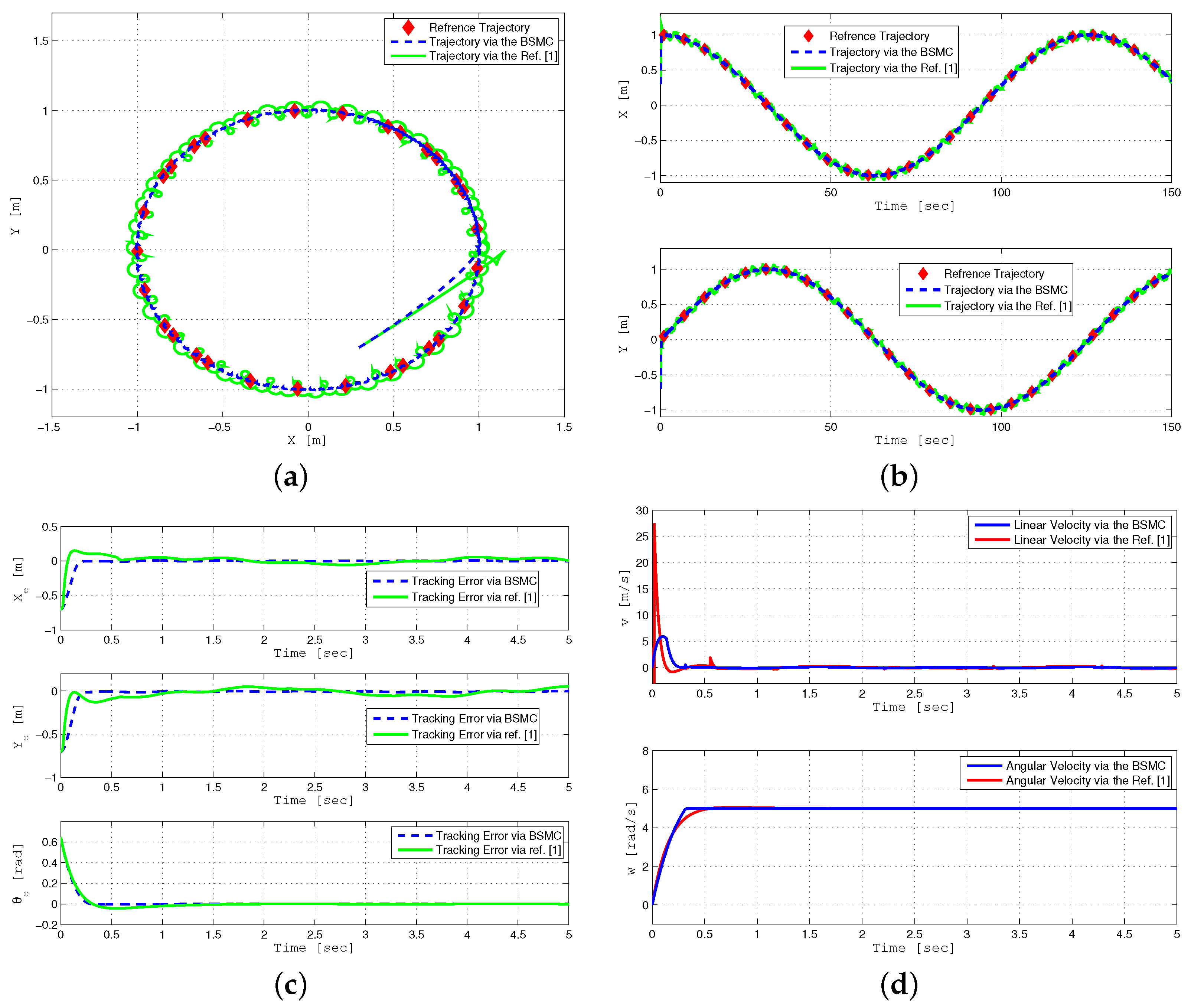
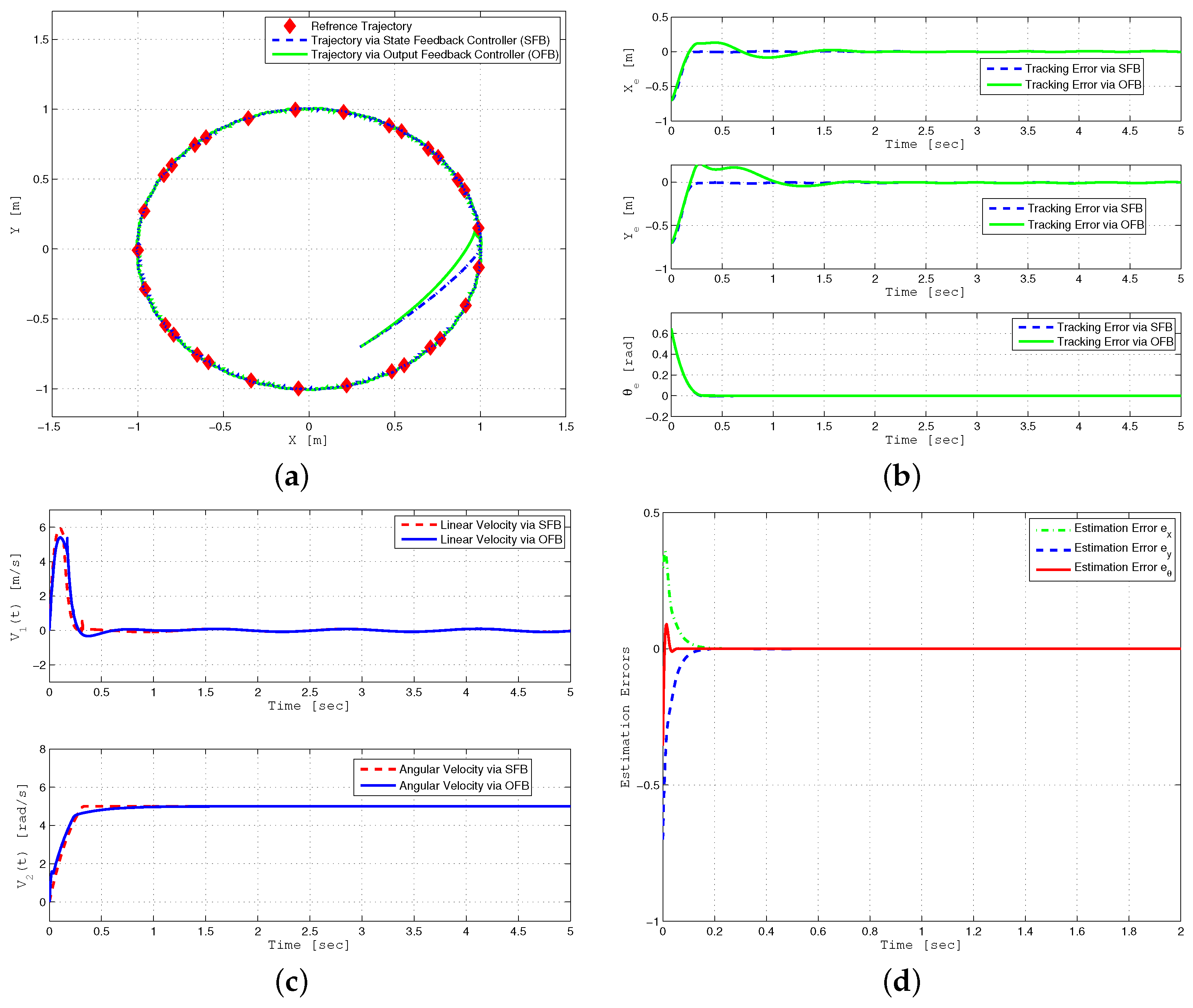
7.2. Trajectory Tracking of a WMR
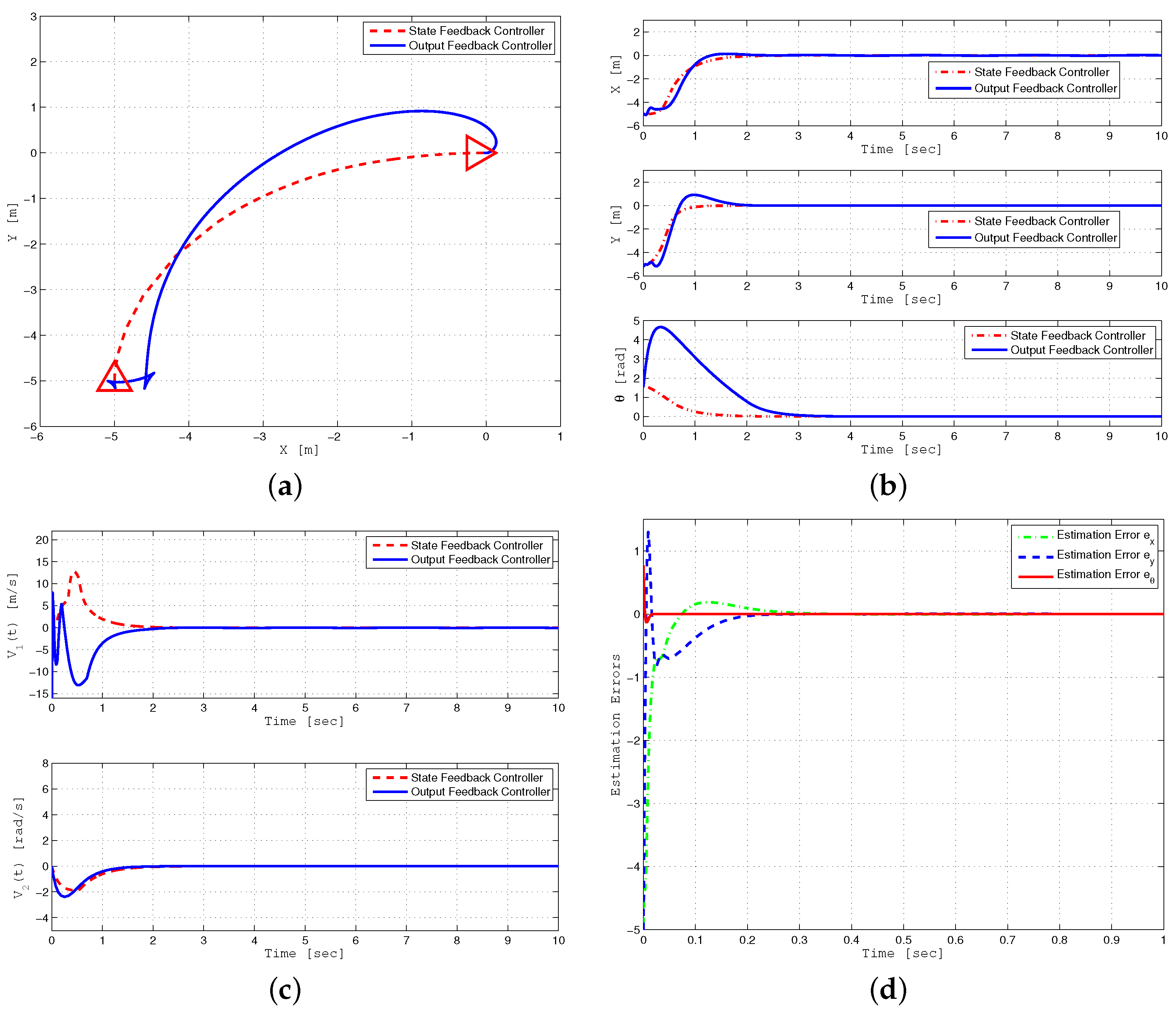
7.3. Posture Stabilization of a WMR
7.4. Output Feedback Control
8. Simulation Results
9. Conclusions
10. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SMC | Sliding mode control |
| HGO | High gain observer |
| WMRs | Wheeled mobile robots |
| MIMO | Multi-inputs multi-outputs |
| BSMC | Backstepping sliding mode control |
| SFB | State feedback |
| OFB | Output feedback |
References
- Rabbani, M.J.; Memon, A.Y. Trajectory Tracking and Stabilization of Nonholonomic Wheeled Mobile Robot Using Recursive Integral Backstepping Control. Electronics 2021, 10, 1992. [Google Scholar] [CrossRef]
- Brockett, R. Asymptotic Stability and Feedback Stabilization. In Differential Geometric Control Theory; Birkhäuser: Boston, MA, USA, 1983; pp. 181–191. [Google Scholar]
- Pliego-Jiménez, J.; Martınez-Clark, R.; Cruz-Hernández, C.; Arellano-Delgado, A. Trajectory tracking of wheeled mobile robots using only cartesian position measurements. Automatica 2021, 133, 109756. [Google Scholar] [CrossRef]
- Liang, X.; Wang, H.; Chen, W.; Guo, D.; Liu, T. Adaptive image-based trajectory tracking control of wheeled mobile robots with an uncalibrated fixed camera. IEEE Trans. Control. Syst. Technol. 2015, 23, 2266–2282. [Google Scholar] [CrossRef]
- Oriolo, G.; De Luca, A.; Vendittelli, M. WMR control via dynamic feedback linearization: Design, implementation, and experimental validation. IEEE Trans. Control. Syst. Technol. 2002, 10, 835–852. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G.; Chen, X.; Zhang, H.; Chen, Q. Simultaneous stabilization and tracking of nonholonomic wmrs with input constraints: Controller design and experimental validation. IEEE Trans. Ind. Electron. 2018, 66, 5343–5352. [Google Scholar] [CrossRef]
- Wang, D.; Xu, G. Full-state tracking and internal dynamics of nonholonomic wheeled mobile robots. IEEE ASME Trans. Mechatron. 2003, 8, 203–214. [Google Scholar] [CrossRef]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Wang, J. Path tracking of wheeled mobile robots based on dynamic prediction model. IEEE Access 2019, 7, 39690–39701. [Google Scholar] [CrossRef]
- Fu, J.; Tian, F.; Chai, T.; Jing, Y.; Li, Z.; Su, C.-Y. Motion tracking control design for a class of nonholonomic mobile robot systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 2150–2156. [Google Scholar] [CrossRef]
- Andreev, A.; Peregudova, O. Lyapunov vector function method in the motion stabilisation problem for nonholonomic mobile robot. Int. J. Syst. Sci. 2017, 48, 2003–2012. [Google Scholar] [CrossRef]
- Coelho, P.; Nunes, U. Path-following control of mobile robots in presence of uncertainties. IEEE Trans. Robot. 2005, 21, 252–261. [Google Scholar] [CrossRef]
- Montoya-Villegas, L.; Moreno-Valenzuela, J.; Pérez-Alcocer, R. A feedback linearization-based motion controller for a UWMR with experimental evaluations. Robotica 2019, 37, 1073–1089. [Google Scholar] [CrossRef]
- Yun, X.; Yamamoto, Y. Stability analysis of the internal dynamics of a wheeled mobile robot. J. Robot. Syst. 1997, 14, 697–709. [Google Scholar] [CrossRef]
- Mu, J.; Yan, X.-G.; Spurgeon, S.K.; Mao, Z. Generalized regular form based SMC for nonlinear systems with application to a WMR. IEEE Trans. Ind. Electron. 2017, 64, 6714–6723. [Google Scholar] [CrossRef]
- Sarrafan, N.; Shojaei, K. High-gain observer-based neural adaptive feedback linearizing control of a team of wheeled mobile robots. Robotica 2020, 38, 69–87. [Google Scholar] [CrossRef]
- Yang, H.; Guo, M.; Xia, Y.; Cheng, L. Trajectory tracking for wheeled mobile robots via model predictive control with softening constraints. IET Control. Theory Appl. 2018, 12, 206–214. [Google Scholar] [CrossRef]
- Xiao, H.; Li, Z.; Yang, C.; Zhang, L.; Yuan, P.; Ding, L.; Wang, T. Robust stabilization of a wheeled mobile robot using model predictive control based on neurodynamics optimization. IEEE Trans. Ind. Electron. 2016, 64, 505–516. [Google Scholar] [CrossRef]
- Ye, H.; Wang, S. Trajectory tracking control for nonholonomic wheeled mobile robots with external disturbances and parameter uncertainties. Int. J. Control. Autom. Syst. 2020, 18, 3015–3022. [Google Scholar] [CrossRef]
- Wu, X.; Jin, P.; Zou, T.; Qi, Z.; Xiao, H.; Lou, P. Backstepping trajectory tracking based on fuzzy sliding mode control for differential mobile robots. J. Intell. Robot. Syst. 2019, 96, 109–121. [Google Scholar] [CrossRef]
- Zhai, J.-y.; Song, Z.-b. Adaptive sliding mode trajectory tracking control for wheeled mobile robots. Int. J. Control. 2019, 92, 2255–2262. [Google Scholar] [CrossRef]
- Goswami, N.K.; Padhy, P.K. Sliding mode controller design for trajectory tracking of a non-holonomic mobile robot with disturbance. Comput. Electr. Eng. 2018, 72, 307–323. [Google Scholar] [CrossRef]
- Moudoud, B.; Aissaoui, H.; Diany, M. Extended state observer-based finite-time adaptive sliding mode control for wheeled mobile robot. J. Control. Decis. 2022, 9, 465–476. [Google Scholar] [CrossRef]
- Yang, J.-M.; Kim, J.-H. Sliding mode control for trajectory tracking of nonholonomic wheeled mobile robots. IEEE Trans. Robot. Autom. 1999, 15, 578–587. [Google Scholar] [CrossRef]
- Yousuf, B.M. Robust output-feedback formation control design for nonholonomic mobile robot (nmrs). Robotica 2019, 37, 1033–1056. [Google Scholar] [CrossRef]
- Peng, S.; Shi, W. Adaptive fuzzy output feedback control of a nonholonomic wheeled mobile robot. IEEE Access 2018, 6, 43414–43424. [Google Scholar] [CrossRef]
- Shojaei, K.; Shahri, A.M. Output feedback tracking control of uncertain non-holonomic wheeled mobile robots: A dynamic surface control approach. IET Control. Theory Appl. 2012, 6, 216–228. [Google Scholar] [CrossRef]
- Shi, S.; Yu, X.; Khoo, S. Robust finite-time tracking control of nonholonomic mobile robots without velocity measurements. Int. J. Control. 2016, 89, 411–423. [Google Scholar] [CrossRef]
- Chwa, D.; Boo, J. Adaptive fuzzy output feedback simultaneous posture stabilization and tracking control of wheeled mobile robots with kinematic and dynamic disturbances. IEEE Access 2020, 8, 228863–228878. [Google Scholar] [CrossRef]
- Cui, M.; Liu, W.; Liu, H.; Jiang, H.; Wang, Z. Extended state observer-based adaptive sliding mode control of differential-driving mobile robot with uncertainties. Nonlinear Dyn. 2016, 83, 667–683. [Google Scholar] [CrossRef]
- Zeng, W.; Wang, Q.; Liu, F.; Wang, Y. Learning from adaptive neural network output feedback control of a unicycle-type mobile robot. ISA Trans. 2016, 61, 337–347. [Google Scholar] [CrossRef]
- Zheng, X.; Wu, Y. Adaptive output feedback stabilization for nonholonomic systems with strong nonlinear drifts. Nonlinear Anal. Theory Methods Appl. 2009, 70, 904–920. [Google Scholar] [CrossRef]
- Shang, Y.; Hou, D.; Gao, F. Global output feedback stabilization of nonholonomic chained form systems with communication delay. IAENG Int. J. Appl. Math. 2016, 46, 367–371. [Google Scholar]
- Gao, F.; Wu, Y. Finite-time output feedback stabilisation of chained-form systems with inputs saturation. Int. J. Control 2017, 90, 1466–1477. [Google Scholar] [CrossRef]
- Ma, T. Extended filtered high-gain output feedback controller for a class of uncertain nonlinear systems subject to external disturbances. Int. J. Control. 2022, 9, 1251–1261. [Google Scholar] [CrossRef]
- Liu, Y.; Söffker, D. Robust control approach for input–output linearizable nonlinear systems using high-gain disturbance observer. Int. J. Robust Nonlinear Control. 2014, 24, 326–339. [Google Scholar] [CrossRef]
- Boker, A.M.; Khalil, H.K. Nonlinear observers comprising high-gain observers and extended kalman filters. Automatica 2013, 49, 3583–3590. [Google Scholar] [CrossRef]
- Khalid, N.; Memon, A.Y. Output feedback control of a class of underactuated nonlinear systems using extended high gain observer. Arab. J. Sci. Eng. 2016, 41, 3531–3542. [Google Scholar] [CrossRef]
- Rabbani, M.J.; Memon, A.Y. Output Feedback Stabilization of Nonholonomic Wheeled Mobile Robot Using Backstepping Control. In Proceedings of the IEEE 12th International Conference on Control System, Computing and Engineering, Penang, Malaysia, 21–22 October 2022; pp. 119–124. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| q | generalized coordinates |
| kinematic constraints matrix | |
| velocity vector | |
| input torque vector | |
| relative degree | |
| internal dynamics | |
| external dynamics | |
| s | sliding surface |
| positive constants | |
| equivalent control input | |
| k | controller gain |
| observer gains | |
| saturation function | |
| K | class K functions |
| substituting in input transformation matrix |
| Parameter | Proposed Controller | Previous Method [25] |
|---|---|---|
| Tracking position errors (m) | ≈0.001 | ≈0.021 |
| Tracking errors convergence time (s) | ≈ 2 | ≈5 |
| Estimation error | zero | not equal to zero |
| Estimation error | zero | not equal to zero |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabbani, M.J.; Memon, A.Y.; Farhan, M.; Larik, R.M.; Ashraf, S.; Burhan Khan, M.; Arfeen, Z.A. Robust Output Feedback Stabilization and Tracking for an Uncertain Nonholonomic Systems with Application to a Mobile Robot. Sensors 2024, 24, 3616. https://doi.org/10.3390/s24113616
Rabbani MJ, Memon AY, Farhan M, Larik RM, Ashraf S, Burhan Khan M, Arfeen ZA. Robust Output Feedback Stabilization and Tracking for an Uncertain Nonholonomic Systems with Application to a Mobile Robot. Sensors. 2024; 24(11):3616. https://doi.org/10.3390/s24113616
Chicago/Turabian StyleRabbani, Muhammad Junaid, Attaullah Y. Memon, Muhammad Farhan, Raja Masood Larik, Shahzad Ashraf, Muhammad Burhan Khan, and Zeeshan Ahmad Arfeen. 2024. "Robust Output Feedback Stabilization and Tracking for an Uncertain Nonholonomic Systems with Application to a Mobile Robot" Sensors 24, no. 11: 3616. https://doi.org/10.3390/s24113616