
Laboratory Investigations of the Leica RTC360 Laser Scanner—Distance Measuring Performance



Abstract
1. Introduction
2. The Leica RTC360 Laser Scanner
3. Methodology
3.1. Related Research
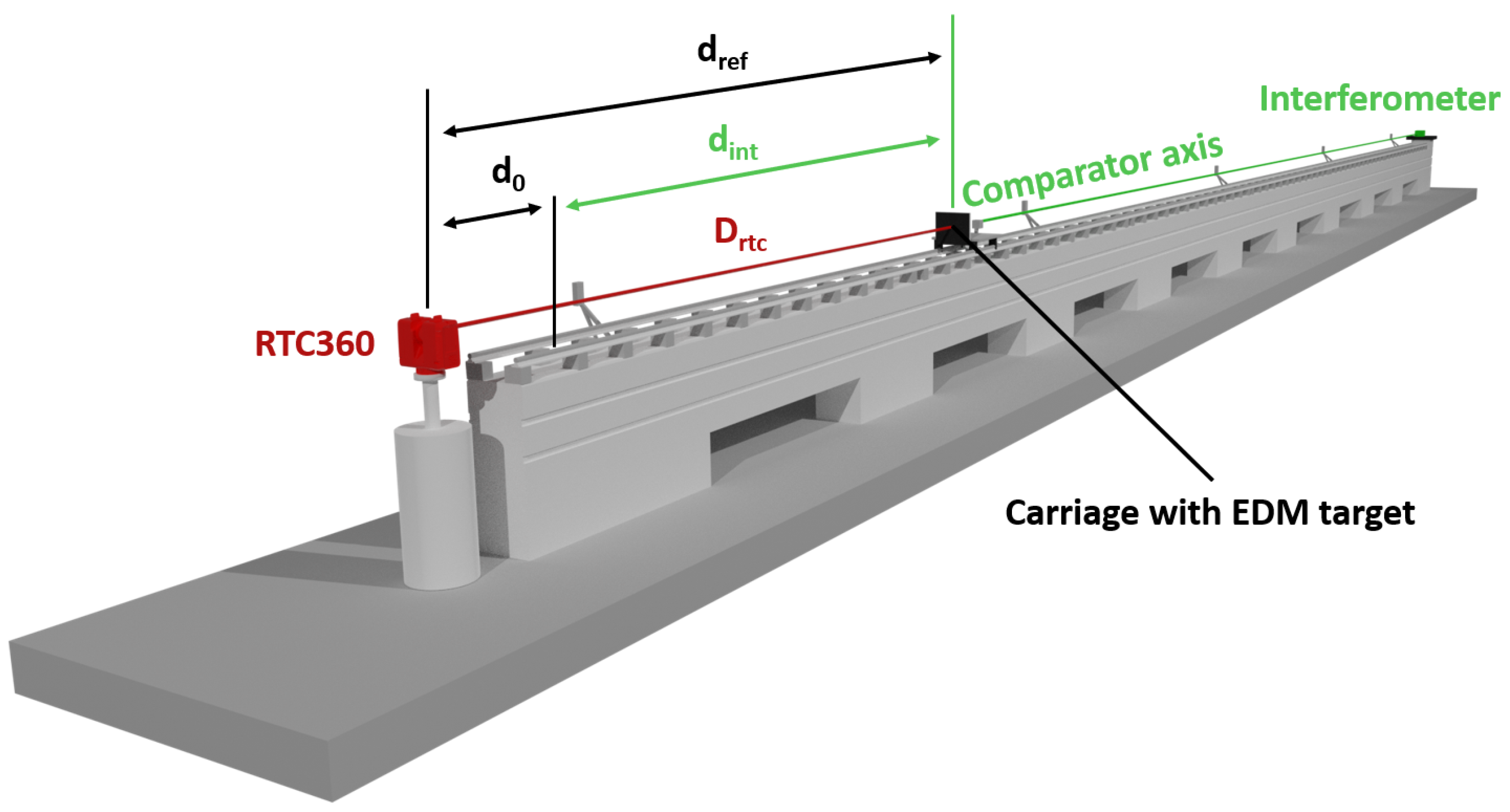
3.2. Concept for Testing the Distance Measurement Performance of the RTC360
4. Laboratory Set-Up
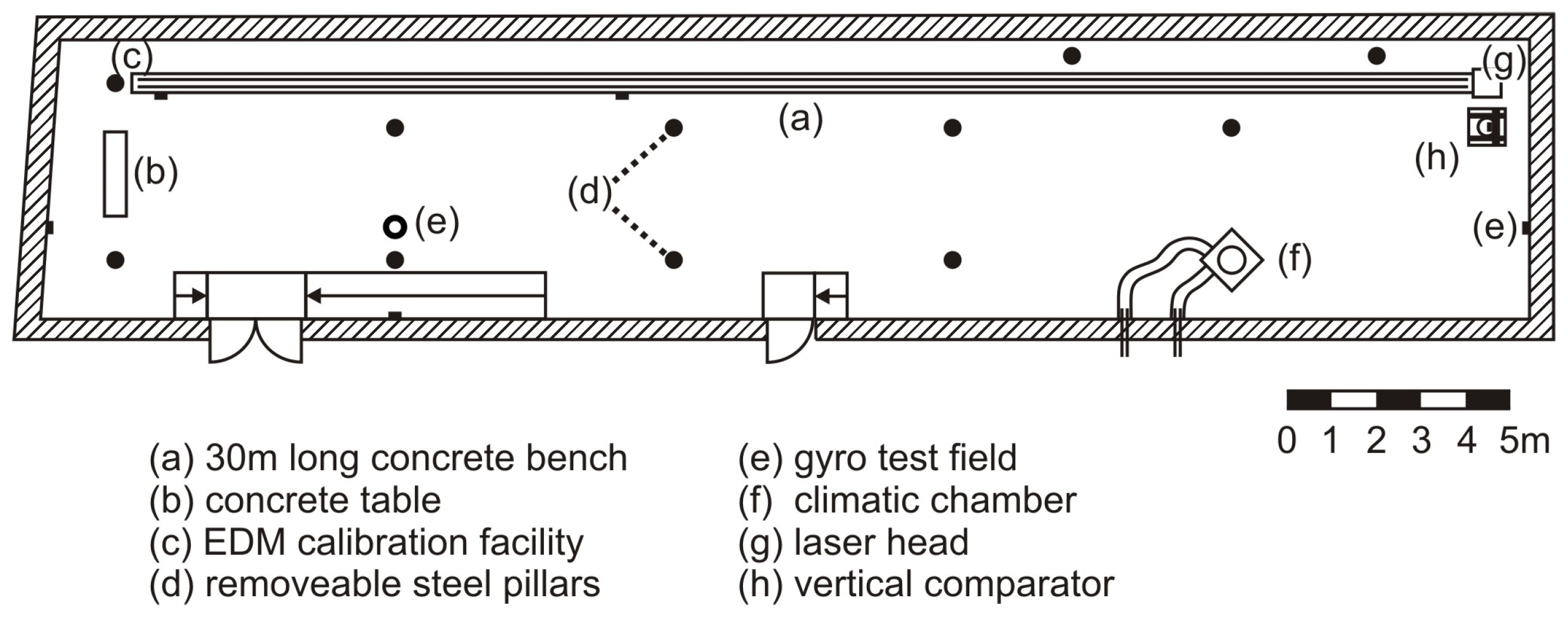
4.1. Geodetic Metrology Laboratory and Its Horizontal Comparator
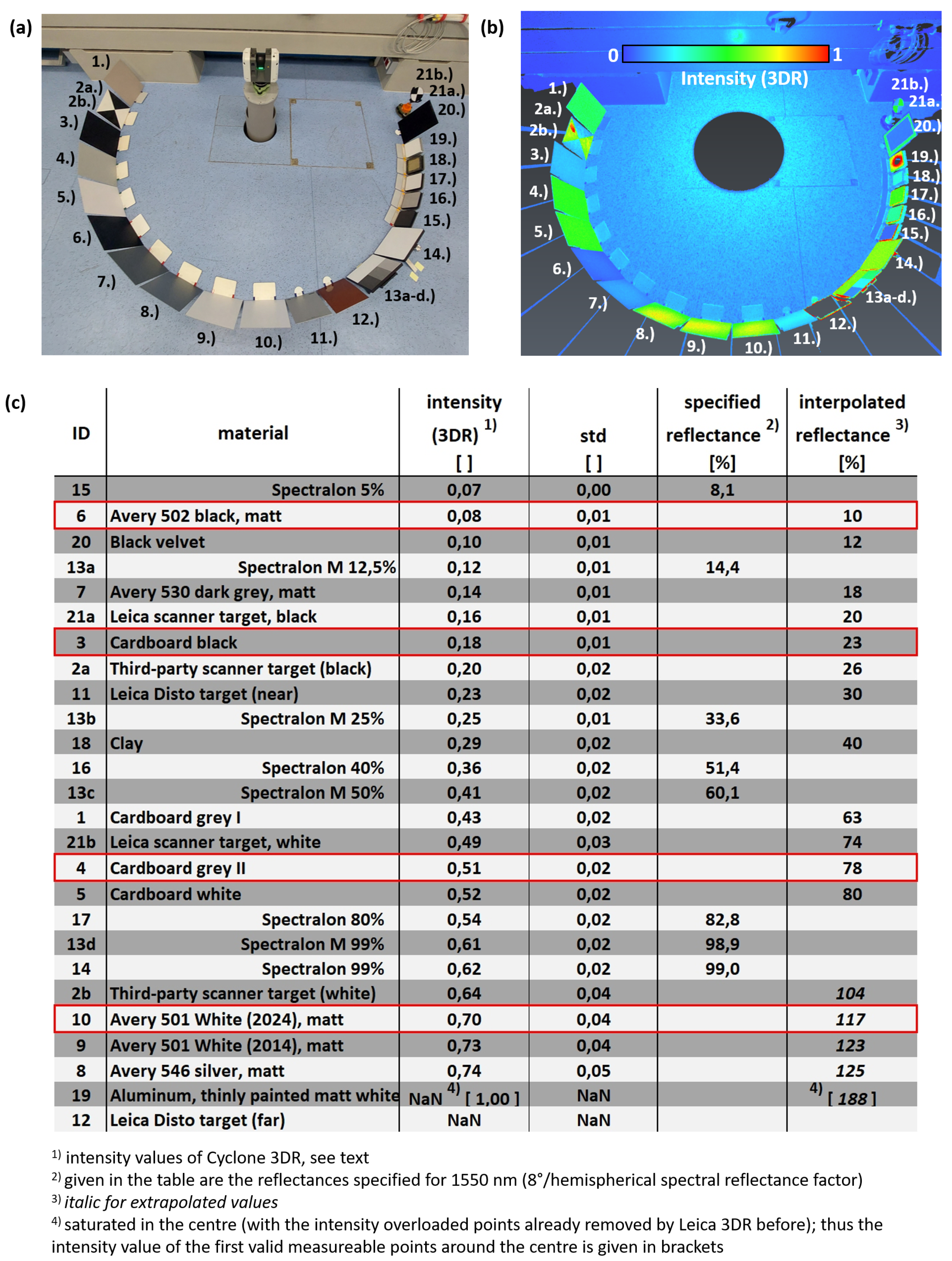
4.2. Selection of EDM Targets
4.3. Determination of the Initial Absolute Distance from the Scanner’s Center to the Targets
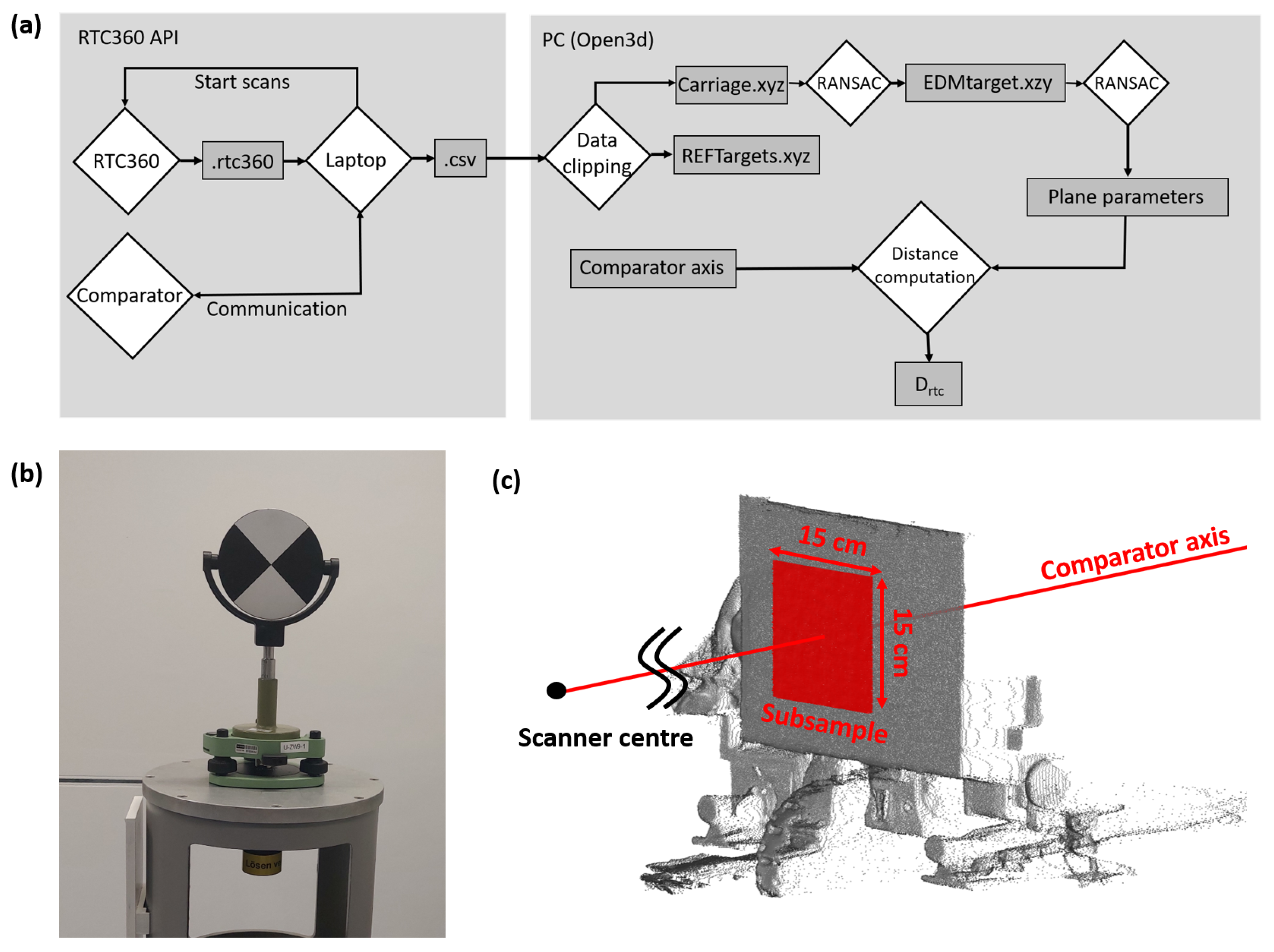
5. Automation of the Test Set-Up, Point Cloud Processing, and Estimation of
6. EDM Target #1: Avery 501 White
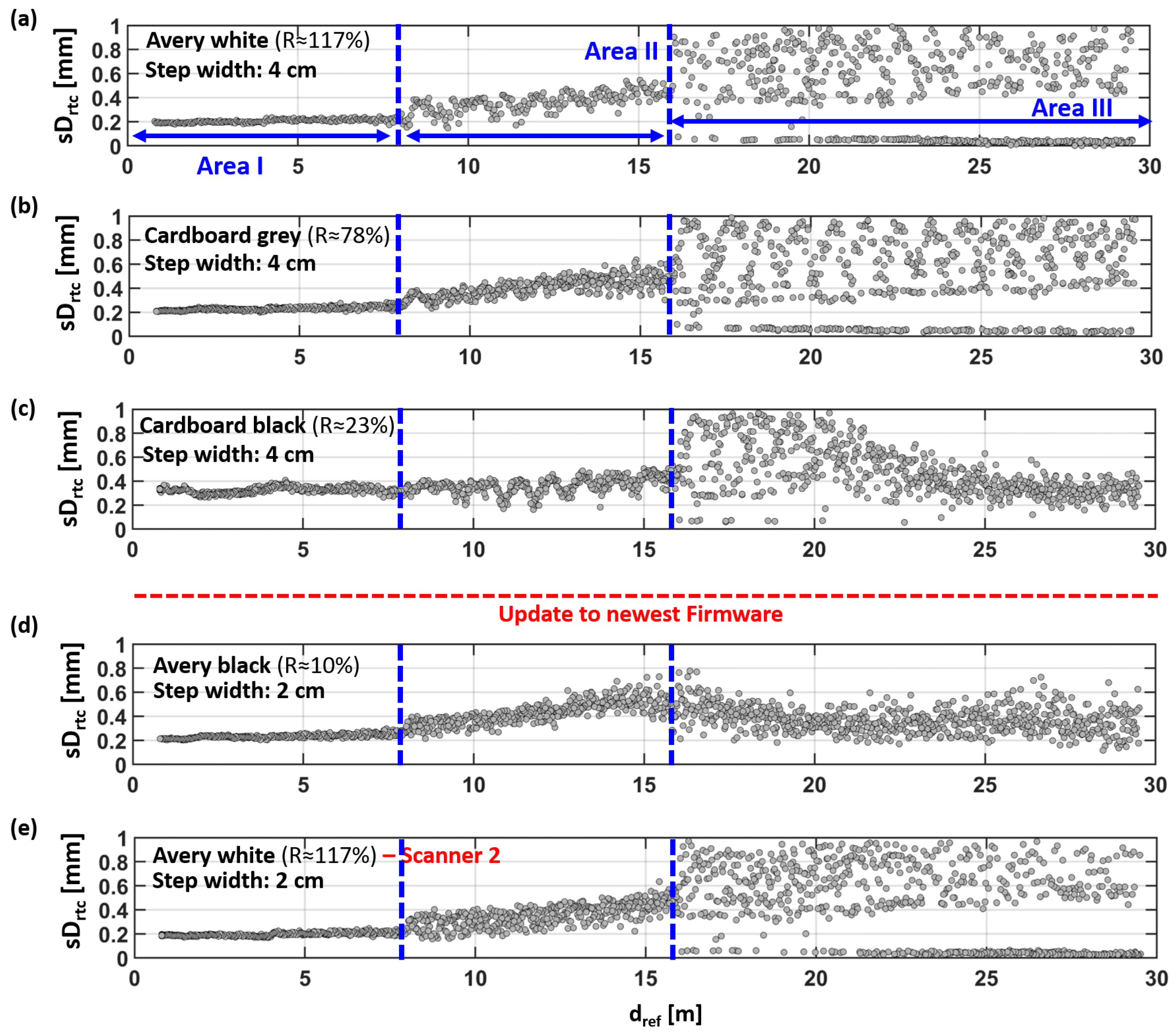
6.1. Performance along the Whole Comparator Distance
6.2. Performance at Selected Distances
- 0.8 m, starting position in Area I with a maximum number of points and the highest variation in incidence angles.
- 10.0 m, position in Area II; here, the range noise is specified by the manufacturer [3].
- 19.8 m, position in Area III; the standard deviation in the measurement series is very low.
- 20.0 m, position in Area III; close to 19.8, but the standard deviation is high and close to 1 mm. Furthermore, this distance is also used in the manufacturer’s noise specification [3].
7. Comparison of Four Different EDM Targets
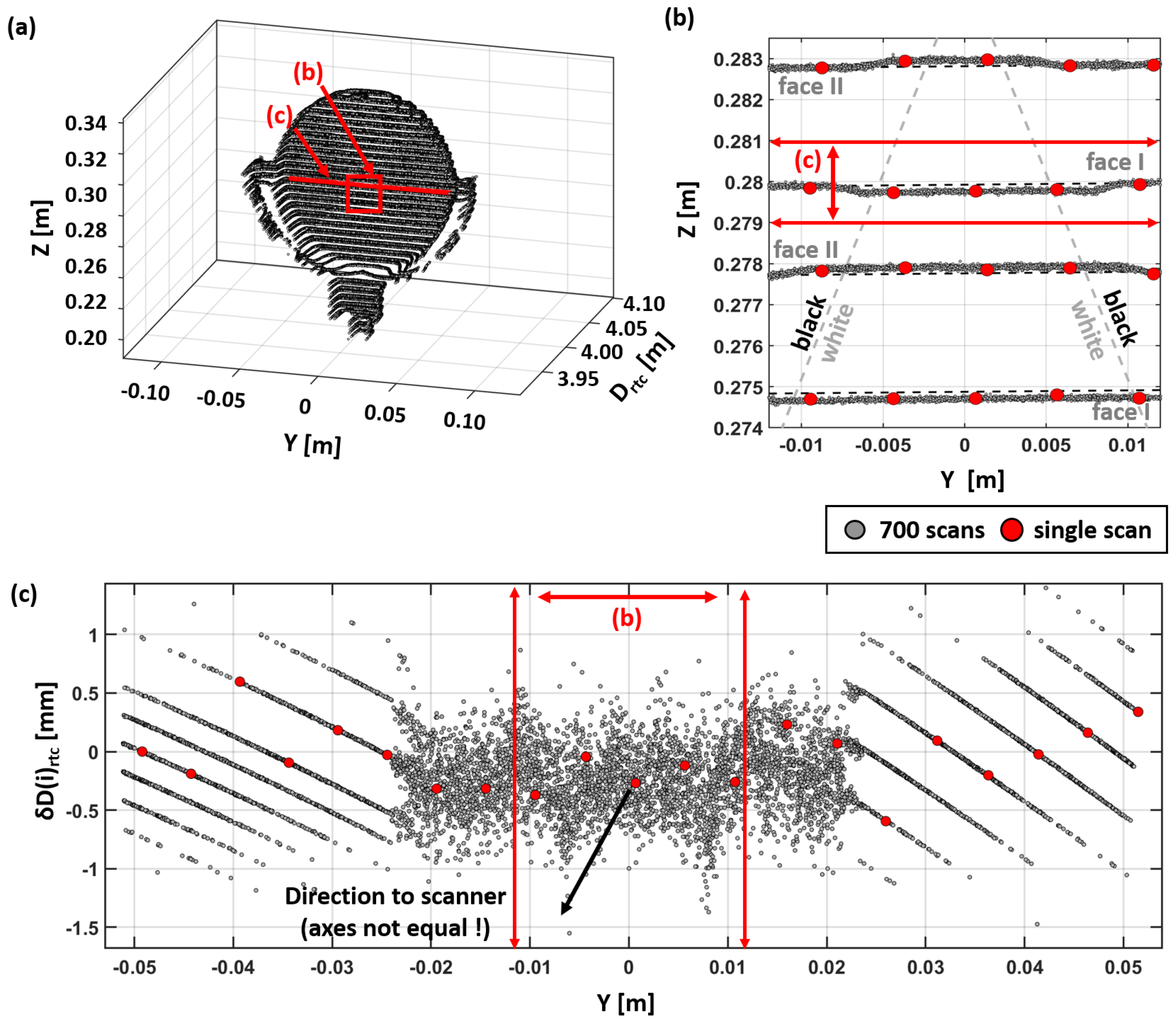
8. Point Cloud Behavior at a Selected Leica Reference Target (API Data)
9. Summary and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Riegl. Riegl VZ-600i Excceding Your Expectations. Datasheet. Available online: http://www.riegl.com/nc/products/terrestrial-scanning/produktdetail/product/scanner/78/ (accessed on 25 March 2024).
- Trimble. Trimble X12 3D Laser Scanning System. Datasheet. Available online: https://geospatial.trimble.com/de/links?dcs=Collection-132661 (accessed on 25 March 2024).
- Leica. Leica RTC360 3D Reality Capture Solution—Fast Agile Precise. Datasheet, 872750en—04.22, Heerbrugg. 2022. Available online: https://leica-geosystems.com/products/laser-scanners/scanners/leica-rtc360 (accessed on 25 March 2024).
- Medić, T. Efficient Calibration Strategies for Panoramic Terrestrial Laser Scanners. Ph.D. Thesis, Rheinische Friedrich-Wilhelms-Universität, Bonn, Germany, 2021. Available online: https://nbn-resolving.org/urn:nbn:de:hbz:5-60976 (accessed on 25 March 2024).
- Jost, B. Strategies for the Empirical Determination of the Stochastic Properties of Terrestrial Laser Scans. Ph.D. Thesis, Rheinische Friedrich-Wilhelms-Universität, Bonn, Germany, 2023. Available online: https://nbn-resolving.org/urn:nbn:de:hbz:5-71297 (accessed on 25 March 2024).
- Schill, F. Überwachung von Tragwerken mit Profilscannern. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2018. Available online: https://tuprints.ulb.tu-darmstadt.de/7267/ (accessed on 25 March 2024).
- Holst, C. Analyse der Konfiguration bei der Approximation ungleichmäßig abgetasteter Oberflächen auf Basis von Nivellements und terrestrischen Laserscans. Ph.D. Thesis, Rheinische Friedrich-Wilhelms-Universität, Bonn, Germany, 2015. ISSN 1864-1113, Nr. 51. Available online: https://dgk.badw.de/fileadmin/user_upload/Files/DGK/docs/c-760.pdf (accessed on 25 March 2024).
- Wieser, A.; Balangé, L.; Bauer, P.; Gehrmann, T.; Hartmann, J.; Holst, C.; Jost, B.; Kuhlmann, H.; Lienhart, W.; Maboudi, M.; et al. Erfahrungen aus einem Koordinierten Vergleich Aktueller Scanner; DVW e. V.: Terrestrisches Laserscanning 2022 (TLS 2022); Wißner Verlag: Augsburg, Germany, 2022; pp. 23–38. [Google Scholar]
- Society for Calibration of Geodetic Devices. Society-Homepage. Available online: https://www.gkgm.de/ (accessed on 28 April 2024).
- Leica. WFD-Wave form Digitizer Technology. White Paper, 947270en—02.21 Heerbrugg. 2021. Available online: https://leica-geosystems.com/de-at/about-us/content-features/wave-form-digitizer-technology-white-paper (accessed on 25 March 2024).
- Bauer, P.; Woschitz, H. Laser Scanning Data and Additional Material from Distance Measurement Investigations of a Leica RTC360 on a Horizontal Comparator Bench; TU Graz Repository: Graz, Austria, 2024. [Google Scholar] [CrossRef]
- Leica. Leica RTC360; User Manual, Version 1.0., 870891-1.0.1en; Leica Geosystems AG: Heerbrugg, Switzerland, 2018. [Google Scholar]
- Biasion, A.; Moerwald, T.; Walser, B.; Walsh, G. A new approach to the Terrestrial Laser Scanner workflow: The RTC360 solution. In Proceedings of the FIG Working Week, Hanoi, Vietnam, 22–26 April 2019; Available online: http://fig.net/resources/proceedings/fig_proceedings/fig2019/papers/ts05f/TS05F_biasion_et_al_9968.pdf (accessed on 11 October 2023).
- Zamecnikova, M.; Wieser, A.; Woschitz, H.; Ressl, C. Influence of surface reflectivity on reflectorless electronic distance measurement and terrestrial laser scanning. J. Appl. Geod. 2014, 8, 311–325. [Google Scholar] [CrossRef]
- Kersten, T.; Lindstaedt, M. Geometric accuracy investigations of terrestrial laser scanner systems in the laboratory and in the field. Appl. Geomat. 2022, 14, 421–434. [Google Scholar] [CrossRef]
- Jost, B.; Coopmann, D.; Kuhlmann, H.; Holst, C. Using the Resolution Capability and the Effective Number of Measurements to Select the “Right” Terrestrial Laser Scanner. In Proceedings of the Contributions to International Conferences on Engineering Surveying: 8th INGEO International Conference on Engineering Surveying and 4th SIG Symposium on Engineering Geodesy, Virtual, 22–23 October 2020; pp. 85–97. [Google Scholar] [CrossRef]
- Roncelli, D. Vorbereitende Arbeiten zur Untersuchung der Distanzmessgenauigkeit des Leica RTC360 Laserscanners. Bachelor’s Thesis, Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Graz, Austria, 2023. [Google Scholar]
- ISO/IEC Guide 98-3:2008; Uncertainty of Measurement—Part 3: Guide to the Expression of Uncertainty in Measurement (GUM:1995). International Organization for Standardization: Geneva, Switzerland, 2008.
- ISO 16331-1:2017; Optics and Optical Instruments—Laboratory Procedures for Testing Surveying and Construction Instruments—Part 1: Performance of Handheld Laser Distance Meters. International Organization for Standardization: Geneva, Switzerland, 2017.
- Zhou, Q.; Park, J.; Koltun, V. Open3D: A Modern Library for 3D Data Processing. arXiv 2018, arXiv:1801.09847. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | Albedo | 3D Point Accuracy (68% According to GUM)/ Range Noise of Single Measurement [mm] | ||||
|---|---|---|---|---|---|---|
| @ 5 m | @ 10 m | @ 20 m | @ 40 m | @ 60 m | ||
| white | 89% | 1.4/0.3 | 1.9/0.4 | 2.9/0.5 | 5.3/0.6 | 7.8/1.0 |
| gray | 21% | 1.5/0.4 | 2.0/0.5 | 3.2/0.6 | 5.7/0.8 | 8.2/2.0 |
| black | 8% | 1.6/0.5 | 2.2/0.6 | 3.4/0.7 | 6.0/2.5 | 8.8/5.0 |
| EDM Target | [m] | [mm] | Measured Points |
|---|---|---|---|
| Avery white | 0.7727 | 0.06 | 24 |
| Avery black | 0.7726 | 0.06 | 24 |
| Cardboard gray | 0.7718 | 0.07 | 24 |
| Cardboard black | 0.7722 | 0.04 | 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bauer, P.; Woschitz, H. Laboratory Investigations of the Leica RTC360 Laser Scanner—Distance Measuring Performance. Sensors 2024, 24, 3742. https://doi.org/10.3390/s24123742
Bauer P, Woschitz H. Laboratory Investigations of the Leica RTC360 Laser Scanner—Distance Measuring Performance. Sensors. 2024; 24(12):3742. https://doi.org/10.3390/s24123742
Chicago/Turabian StyleBauer, Peter, and Helmut Woschitz. 2024. "Laboratory Investigations of the Leica RTC360 Laser Scanner—Distance Measuring Performance" Sensors 24, no. 12: 3742. https://doi.org/10.3390/s24123742
APA StyleBauer, P., & Woschitz, H. (2024). Laboratory Investigations of the Leica RTC360 Laser Scanner—Distance Measuring Performance. Sensors, 24(12), 3742. https://doi.org/10.3390/s24123742