
Comprehensive Characterisation of a Low-Frequency-Vibration Energy Harvester


Abstract

1. Introduction
- First, obtain a sensible model of the harvester. If possible, it should consider not only the global behaviour in terms of the energy yield but also model the mechanical/EM/electrical interactions, which would enable detecting limitations and demonstrate means of improvement.
- A complete experimental characterisation of the device, oriented to validate and characterise the model.
- An identification procedure to validate the model and extract the relevant parameter values. With these parameters, the model will serve to accurately simulate the harvester behaviour and predict the energy generation capability under different levels of excitation.
2. Energy Harvester Description and Mathematical Modelling
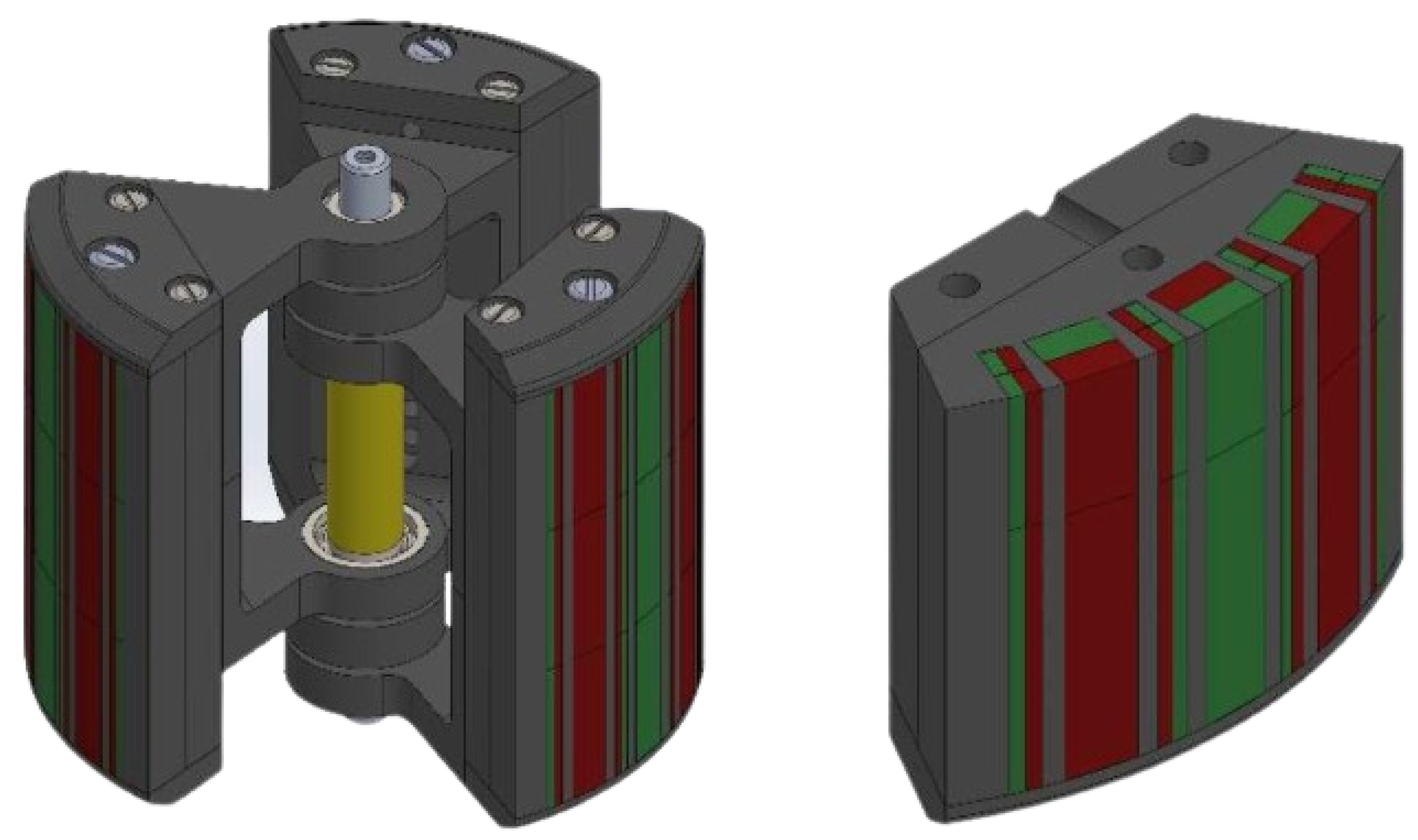
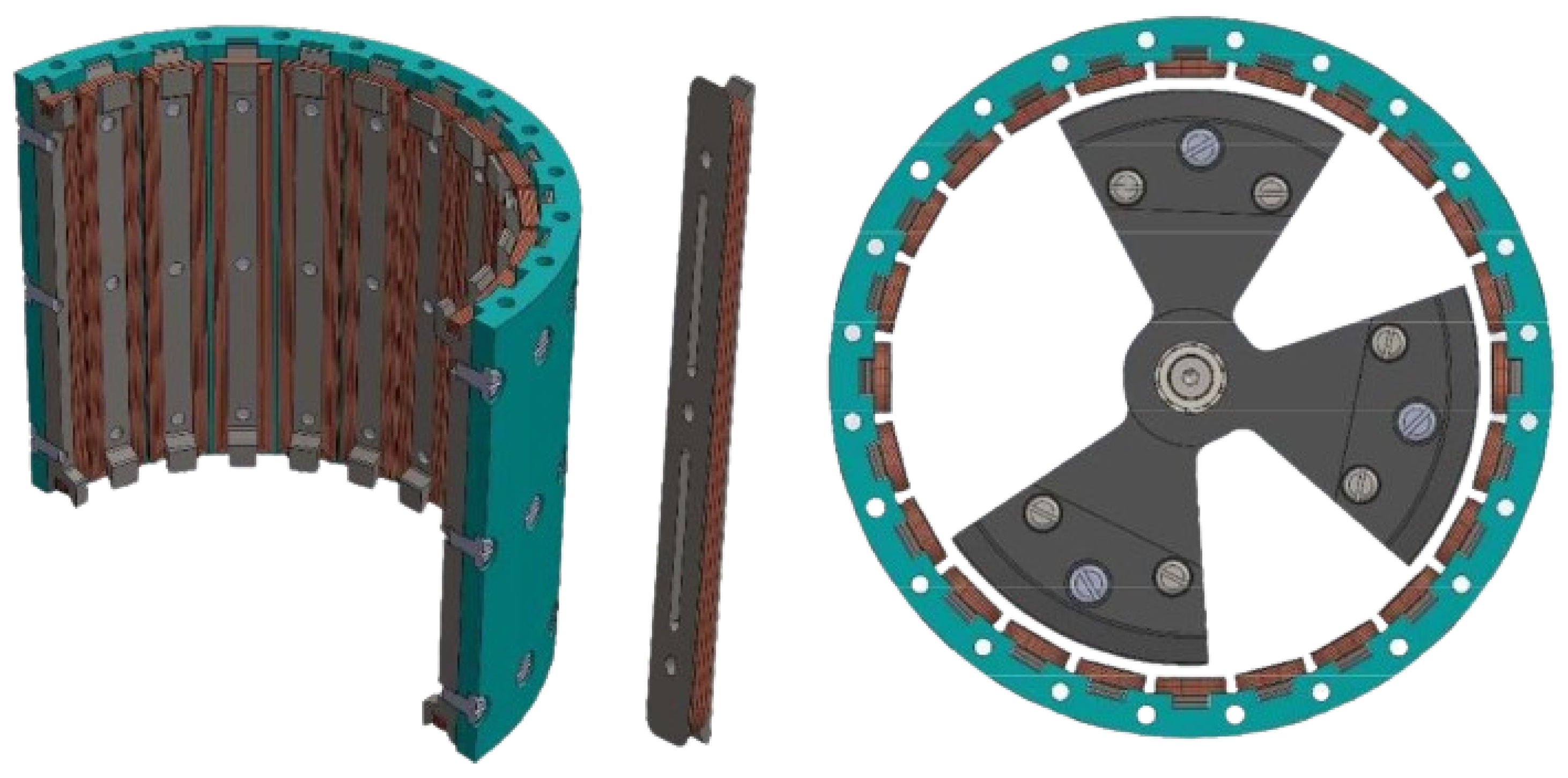
2.1. System Description
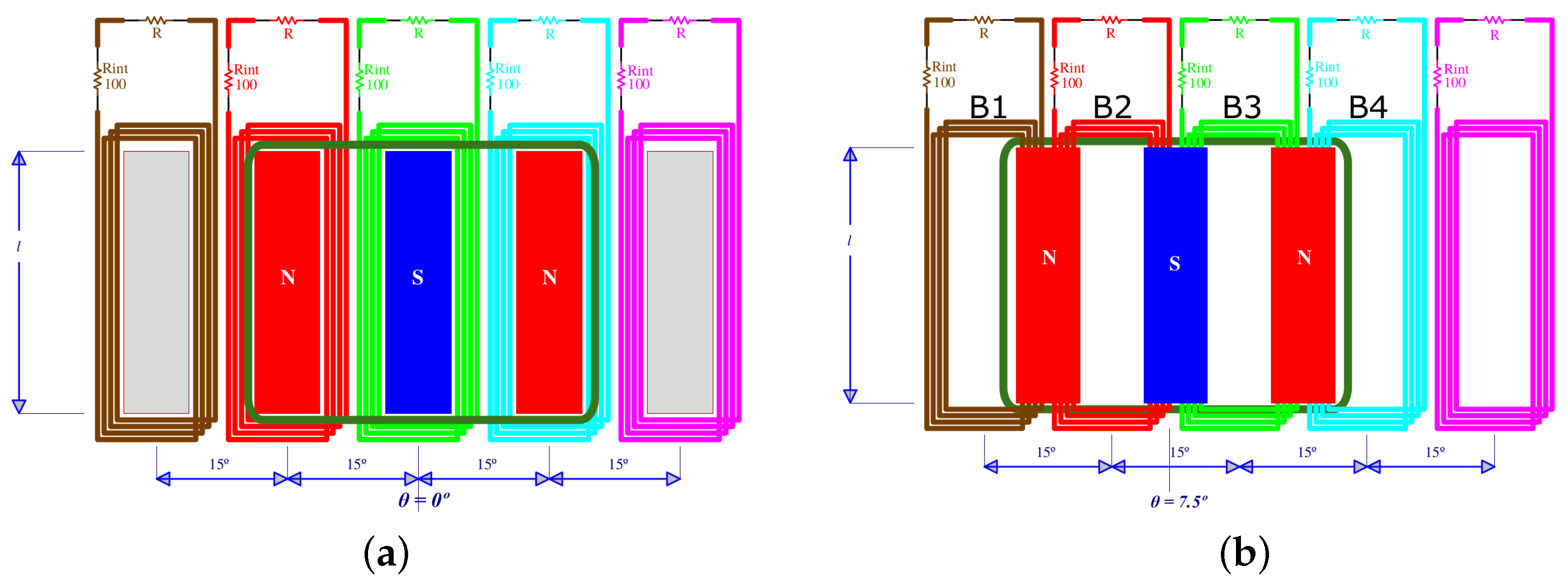
2.2. Electromechanical Modelling
2.3. Power Generation Modelling
3. Model Identification Approach
3.1. Image Processing
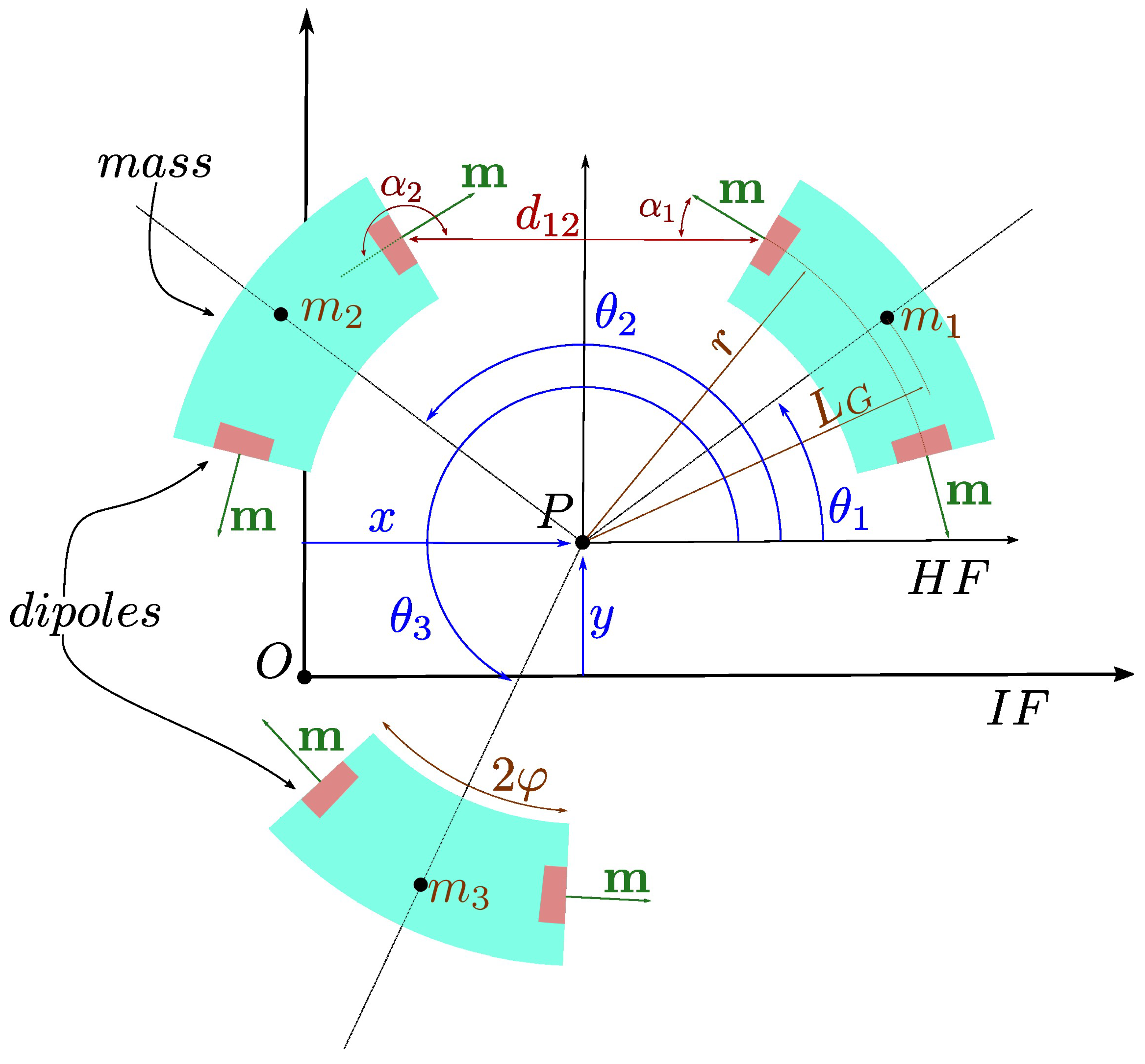
3.2. Rotational Coordinates Calculations
3.3. Numerical Differentiation
3.4. Linear Parameter Estimation Approach
3.5. Comparison to the Previous Identification Procedure
4. Experiments and Estimation Results
4.1. Experiment Design for Parameter Estimation
4.2. Combination of Multiple Experiments
4.3. Estimation Results
4.4. Simulation of Generated Power for Different Loads
4.5. Brief Efficiency Comparison with Other Techniques
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sanislav, T.; Mois, G.D.; Zeadally, S.; Folea, S.C. Energy harvesting techniques for internet of things (IoT). IEEE Access 2021, 9, 39530–39549. [Google Scholar] [CrossRef]
- Vullers, R.J.; Van Schaijk, R.; Visser, H.J.; Penders, J.; Van Hoof, C. Energy harvesting for autonomous wireless sensor networks. IEEE Solid-State Circuits Mag. 2010, 2, 29–38. [Google Scholar] [CrossRef]
- Priya, S.; Inman, D.J. Energy Harvesting Technologies; Springer: Berlin/Heidelberg, Germany, 2009; Volume 21. [Google Scholar]
- Harb, A. Energy harvesting: State-of-the-art. Renew. Energy 2011, 36, 2641–2654. [Google Scholar] [CrossRef]
- Carneiro, P.; dos Santos, M.P.S.; Rodrigues, A.; Ferreira, J.A.; Simões, J.A.; Marques, A.T.; Kholkin, A.L. Electromagnetic energy harvesting using magnetic levitation architectures: A review. Appl. Energy 2020, 260, 114191. [Google Scholar] [CrossRef]
- Ahmad, I.; Hee, L.M.; Abdelrhman, A.M.; Imam, S.A.; Leong, M. Scopes, challenges and approaches of energy harvesting for wireless sensor nodes in machine condition monitoring systems: A review. Measurement 2021, 183, 109856. [Google Scholar] [CrossRef]
- Naifar, S.; Bradai, S.; Viehweger, C.; Kanoun, O. Survey of electromagnetic and magnetoelectric vibration energy harvesters for low frequency excitation. Measurement 2017, 106, 251–263. [Google Scholar] [CrossRef]
- Sun, R.; Zhou, S.; Cheng, L. Ultra-low frequency vibration energy harvesting: Mechanisms, enhancement techniques, and scaling laws. Energy Convers. Manag. 2023, 276, 116585. [Google Scholar] [CrossRef]
- Fort, E.H.; Blanco-Carmona, P.; Garcia-Oya, J.R.; Muñoz-Chavero, F.; Gonzalez-Carvajal, R.; Serrano-Chacon, A.R.; Mascort-Albea, E.J. Wireless and Low-Power System for Synchronous and Real-Time Structural-Damage Assessment. IEEE Sens. J. 2023. [Google Scholar]
- Sharghi, H.; Bilgen, O. Energy Harvesting from Human Walking Motion using Pendulum-based Electromagnetic Generators. J. Sound Vib. 2022, 534, 117036. [Google Scholar] [CrossRef]
- Joyce, B.; Farmer, J.; Inman, D. Electromagnetic energy harvester for monitoring wind turbine blades. Wind Energy 2014, 17, 869–876. [Google Scholar] [CrossRef]
- Fu, H.; Jiang, J.; Hu, S.; Rao, J.; Theodossiades, S. A multi-stable ultra-low frequency energy harvester using a nonlinear pendulum and piezoelectric transduction for self-powered sensing. Mech. Syst. Signal Process. 2023, 189, 110034. [Google Scholar] [CrossRef]
- Castellano-Aldave, C.; Carlosena, A.; Iriarte, X.; Plaza, A. Ultra-low frequency multidirectional harvester for wind turbines. Appl. Energy 2023, 334, 120715. [Google Scholar] [CrossRef]
- Dal Bo, L.; Gardonio, P. Energy harvesting with electromagnetic and piezoelectric seismic transducers: Unified theory and experimental validation. J. Sound Vib. 2018, 433, 385–424. [Google Scholar] [CrossRef]
- Ramezanpour, R.; Nahvi, H.; Ziaei-Rad, S. Electromechanical behavior of a pendulum-based piezoelectric frequency up-converting energy harvester. J. Sound Vib. 2016, 370, 280–305. [Google Scholar] [CrossRef]
- Moss, S.D.; Payne, O.R.; Hart, G.A.; Ung, C. Scaling and power density metrics of electromagnetic vibration energy harvesting devices. Smart Mater. Struct. 2015, 24, 023001. [Google Scholar] [CrossRef]
- Dalola, S.; Ferrari, M.; Ferrari, V.; Guizzetti, M.; Marioli, D.; Taroni, A. Characterization of thermoelectric modules for powering autonomous sensors. IEEE Trans. Instrum. Meas. 2008, 58, 99–107. [Google Scholar] [CrossRef]
- Zucca, M.; Callegaro, L. A setup for the performance characterization and traceable efficiency measurement of magnetostrictive harvesters. IEEE Trans. Instrum. Meas. 2014, 64, 1431–1437. [Google Scholar] [CrossRef]
- Trigona, C.; Andò, B.; Baglio, S. Performance measurement methodologies and metrics for vibration energy scavengers. IEEE Trans. Instrum. Meas. 2017, 66, 3327–3339. [Google Scholar] [CrossRef]
- Ferrari, M.; Ferrari, V.; Marioli, D.; Taroni, A. Modeling, fabrication and performance measurements of a piezoelectric energy converter for power harvesting in autonomous microsystems. IEEE Trans. Instrum. Meas. 2006, 55, 2096–2101. [Google Scholar] [CrossRef]
- Ruan, J.J.; Lockhart, R.A.; Janphuang, P.; Quintero, A.V.; Briand, D.; de Rooij, N. An automatic test bench for complete characterization of vibration-energy harvesters. IEEE Trans. Instrum. Meas. 2013, 62, 2966–2973. [Google Scholar] [CrossRef]
- IEC 62830-1; Semiconductor Devices—Semiconductor Devices for Energy Harvesting and Generation—Part 1: Vibration Based Piezoelectric Energy Harvesting. International Electrotechnical Commission: Geneva, Switzerland, 2017.
- Batra, A.; Currie, J.; Alomari, A.; Aggarwal, M.; Bowen, C. A versatile and fully instrumented test station for piezoelectric energy harvesters. Measurement 2018, 114, 9–15. [Google Scholar] [CrossRef]
- Kraśny, M.J.; Bowen, C.R. A system for characterisation of piezoelectric materials and associated electronics for vibration powered energy harvesting devices. Measurement 2021, 168, 108285. [Google Scholar] [CrossRef]
- Gutierrez, M.; Shahidi, A.; Berdy, D.; Peroulis, D. Design and characterization of a low frequency 2-dimensional magnetic levitation kinetic energy harvester. Sens. Actuators A Phys. 2015, 236, 1–10. [Google Scholar] [CrossRef]
- Saravia, C.M.; Ramírez, J.M.; Gatti, C.D. A hybrid numerical-analytical approach for modeling levitation based vibration energy harvesters. Sens. Actuators A Phys. 2017, 257, 20–29. [Google Scholar] [CrossRef]
- Naifar, S.; Trigona, C.; Bradai, S.; Baglio, S.; Kanoun, O. Characterization of a smart transducer for axial force measurements in vibrating environments. Measurement 2020, 166, 108157. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Marletta, V.; Bulsara, A.R. Modeling a nonlinear harvester for low energy vibrations. IEEE Trans. Instrum. Meas. 2018, 68, 1619–1627. [Google Scholar] [CrossRef]
- Ando, B.; Baglio, S.; Bulsara, A.R.; Marletta, V.; Pistorio, A. Investigation of a nonlinear energy harvester. IEEE Trans. Instrum. Meas. 2017, 66, 1067–1075. [Google Scholar] [CrossRef]
- Nammari, A.; Caskey, L.; Negrete, J.; Bardaweel, H. Fabrication and characterization of non-resonant magneto-mechanical low-frequency vibration energy harvester. Mech. Syst. Signal Process. 2018, 102, 298–311. [Google Scholar] [CrossRef]
- Cullity, B.D.; Graham, C.D. Introduction to Magnetic Materials; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Bersani, A.M.; Caressa, P. Lagrangian descriptions of dissipative systems: A review. Math. Mech. Solids 2021, 26, 785–803. [Google Scholar] [CrossRef]
- Ahn, S.J.; Rauh, W.; Warnecke, H.J. Least-squares orthogonal distances fitting of circle, sphere, ellipse, hyperbola, and parabola. Pattern Recognit. 2001, 34, 2283–2303. [Google Scholar] [CrossRef]
- Van Breugel, F.; Kutz, J.N.; Brunton, B.W. Numerical differentiation of noisy data: A unifying multi-objective optimization framework. IEEE Access 2020, 8, 196865–196877. [Google Scholar] [CrossRef] [PubMed]
- Aster, R.C.; Borchers, B.; Thurber, C.H. Parameter Estimation and Inverse Problems; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Mueller, J.L.; Siltanen, S. Linear and Nonlinear Inverse Problems with Practical Applications; SIAM: Philadelphia, PA, USA, 2012. [Google Scholar]
- Morelli, E.A.; Klein, V. Aircraft System Identification: Theory and Practice; Sunflyte Enterprises: Williamsburg, VA, USA, 2016; Volume 2. [Google Scholar]
- Wu, Y.; Qiu, J.; Zhou, S.; Ji, H.; Chen, Y.; Li, S. A piezoelectric spring pendulum oscillator used for multi-directional and ultra-low frequency vibration energy harvesting. Appl. Energy 2018, 231, 600–614. [Google Scholar] [CrossRef]
- Shi, G.; Tong, D.; Xia, Y.; Jia, S.; Chang, J.; Li, Q.; Wang, X.; Xia, H.; Ye, Y. A piezoelectric vibration energy harvester for multi-directional and ultra-low frequency waves with magnetic coupling driven by rotating balls. Appl. Energy 2022, 310, 118511. [Google Scholar] [CrossRef]
- Fu, H.; Theodossiades, S.; Gunn, B.; Abdallah, I.; Chatzi, E. Ultra-low frequency energy harvesting using bi-stability and rotary-translational motion in a magnet-tethered oscillator. Nonlinear Dyn. 2020, 101, 2131–2143. [Google Scholar] [CrossRef]
- Masabi, S.N.; Fu, H.; Theodossiades, S. A bistable rotary-translational energy harvester from ultra-low-frequency motions for self-powered wireless sensing. J. Phys. D Appl. Phys. 2022, 56, 024001. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Yeatman, E.M.; Rao, G.K.; Holmes, A.S.; Green, T.C. Energy harvesting from human and machine motion for wireless electronic devices. Proc. IEEE 2008, 96, 1457–1486. [Google Scholar] [CrossRef]
- Liu, J.; Luo, H.; Yang, T.; Cui, Y.; Lu, K.; Qin, W. Double bistable superposition strategy for improving the performance of triboelectric nanogenerator. Mech. Syst. Signal Process. 2024, 212, 111304. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BB | WB | |
|---|---|---|
| [kg m2] | 1.51 | 5.42 |
| [N m s] | 4.31 | 5.11 |
| [N m s] | 7.42 | 7.42 |
| [N m s] | 2.37 | 2.36 |
| [N m s] | 1.81 | 1.81 |
| [J, J m3] | 3.32 , −2.75 , 4.58 , −3.17 | 7.75 |
| 6.22 , −3.06 , −1.07 , −5.01 | ||
| −2.05 , −6.11 , −1.14 , −5.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plaza, A.; Iriarte, X.; Castellano-Aldave, C.; Carlosena, A. Comprehensive Characterisation of a Low-Frequency-Vibration Energy Harvester. Sensors 2024, 24, 3813. https://doi.org/10.3390/s24123813
Plaza A, Iriarte X, Castellano-Aldave C, Carlosena A. Comprehensive Characterisation of a Low-Frequency-Vibration Energy Harvester. Sensors. 2024; 24(12):3813. https://doi.org/10.3390/s24123813
Chicago/Turabian StylePlaza, Aitor, Xabier Iriarte, Carlos Castellano-Aldave, and Alfonso Carlosena. 2024. "Comprehensive Characterisation of a Low-Frequency-Vibration Energy Harvester" Sensors 24, no. 12: 3813. https://doi.org/10.3390/s24123813
APA StylePlaza, A., Iriarte, X., Castellano-Aldave, C., & Carlosena, A. (2024). Comprehensive Characterisation of a Low-Frequency-Vibration Energy Harvester. Sensors, 24(12), 3813. https://doi.org/10.3390/s24123813