
A Low-Frequency Vibration Sensor Based on Ball Triboelectric Nanogenerator for Marine Pipeline Condition Monitoring

Abstract
:1. Introduction
2. Materials and Methods
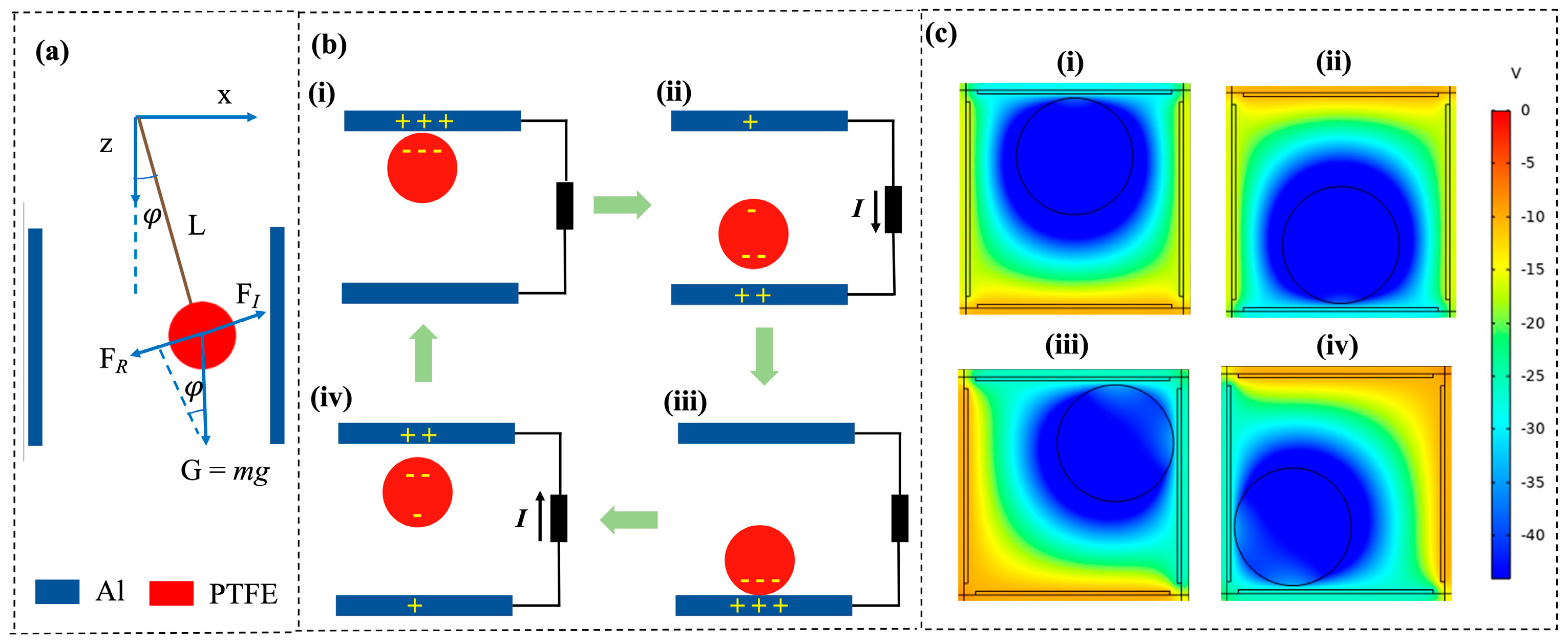
2.1. Working Principle and Theoretical Model of the B-TENG Sensor
2.2. Fabrication and Experimental Setup of the B-TENG Sensor
- (1)
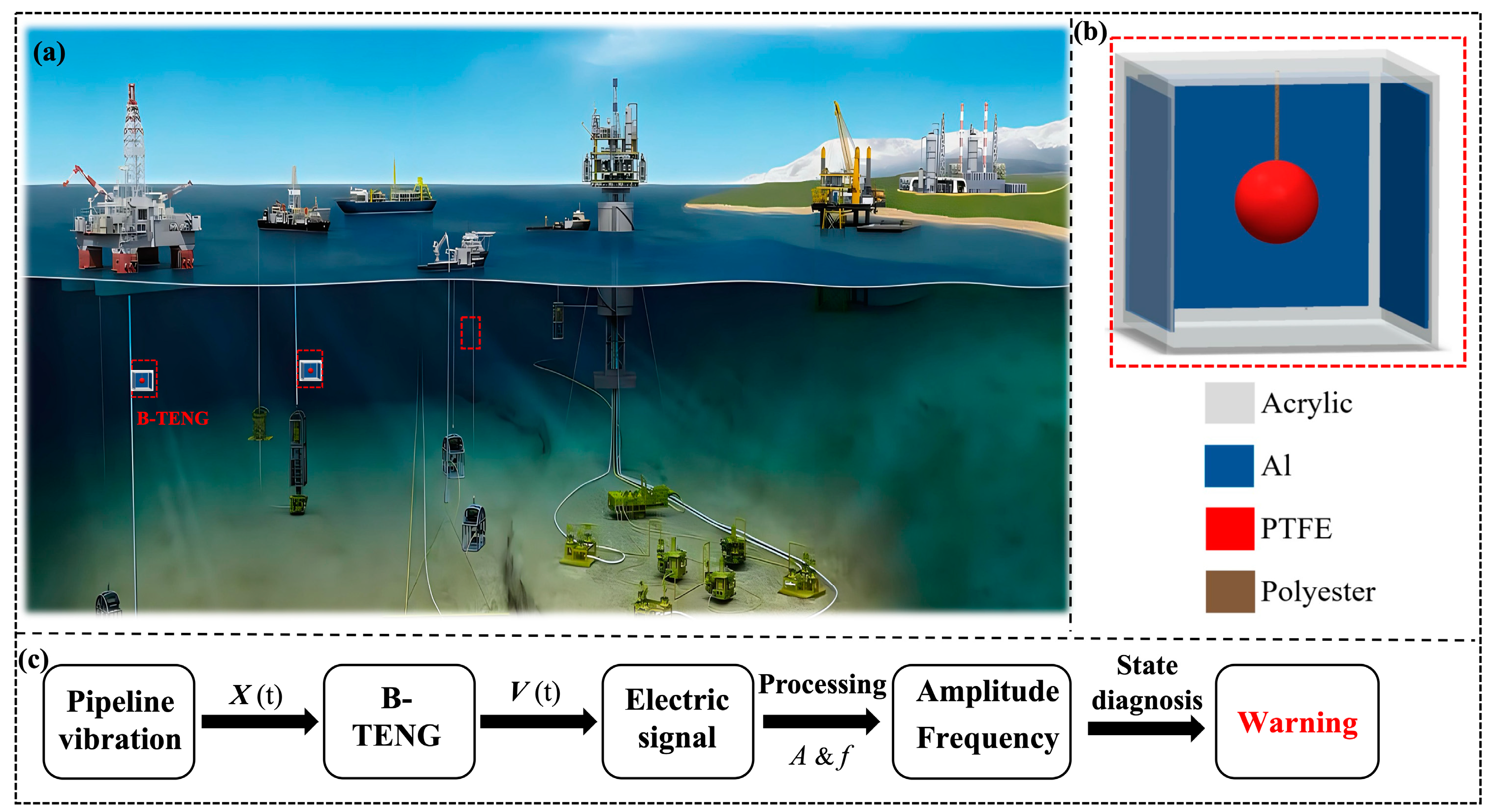
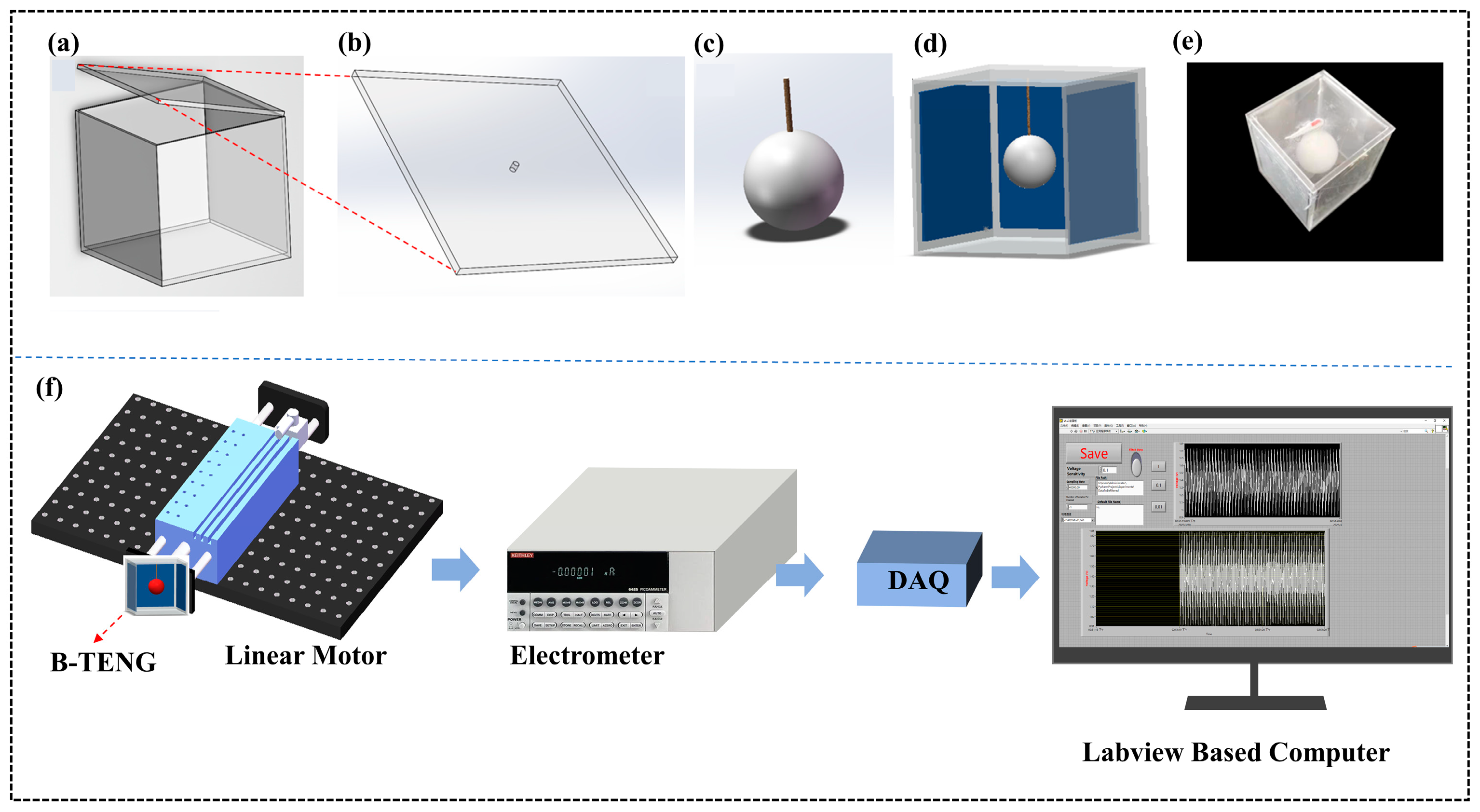
- Acrylic housing (Nanchang Intech Trading Co., Ltd., Nanchang, China). To make it easier to observe the interior, a highly transparent acrylic sheet is used as the external housing of the B-TENG. Its thickness is 2 mm, and the internal dimensions of the square shell are 60 mm × 60 mm. It is worth noting that the use of acrylic as the shell of the B-TENG in this paper is mainly for the convenience of observing the vibration state of the ball in the cube, and other more suitable materials should be selected in practice for the sake of pressure resistance and sealing considerations.
- (2)
- Electrodes. Four square aluminum foil (Shenzhen Milleqi Tape Co., Ltd., Shenzhen, China) tapes with an area of 55 mm × 55 mm and a thickness of 0.2 mm were selected, which could be directly adhered to the inner wall of the acrylic housing. At the same time, enameled copper wires were used to connect the electrodes to the data measurement end of the electrometer.
- (3)
- Dielectric balls (Yiwu Hongzhou Trading Co., Ltd., Jinhua, China) The different balls (diameter of 30 mm) are made of PP, PA, PTFE, and POM, respectively. The selected materials have good abrasion resistance. A 1 mm diameter hole is punched in the center of the ball for easy hanging.
- (4)
- Polyester rope (Wenzhou Nazhi Fasteners Co., Ltd., Wenzhou, China). Polyester rope with a diameter of 0.2 mm was chosen because of its low modulus of elasticity; even if it is subjected to prolonged stress in the experiment, the deformation is very small, and it is suitable for hanging the ball in the cube.
3. Results and Discussion
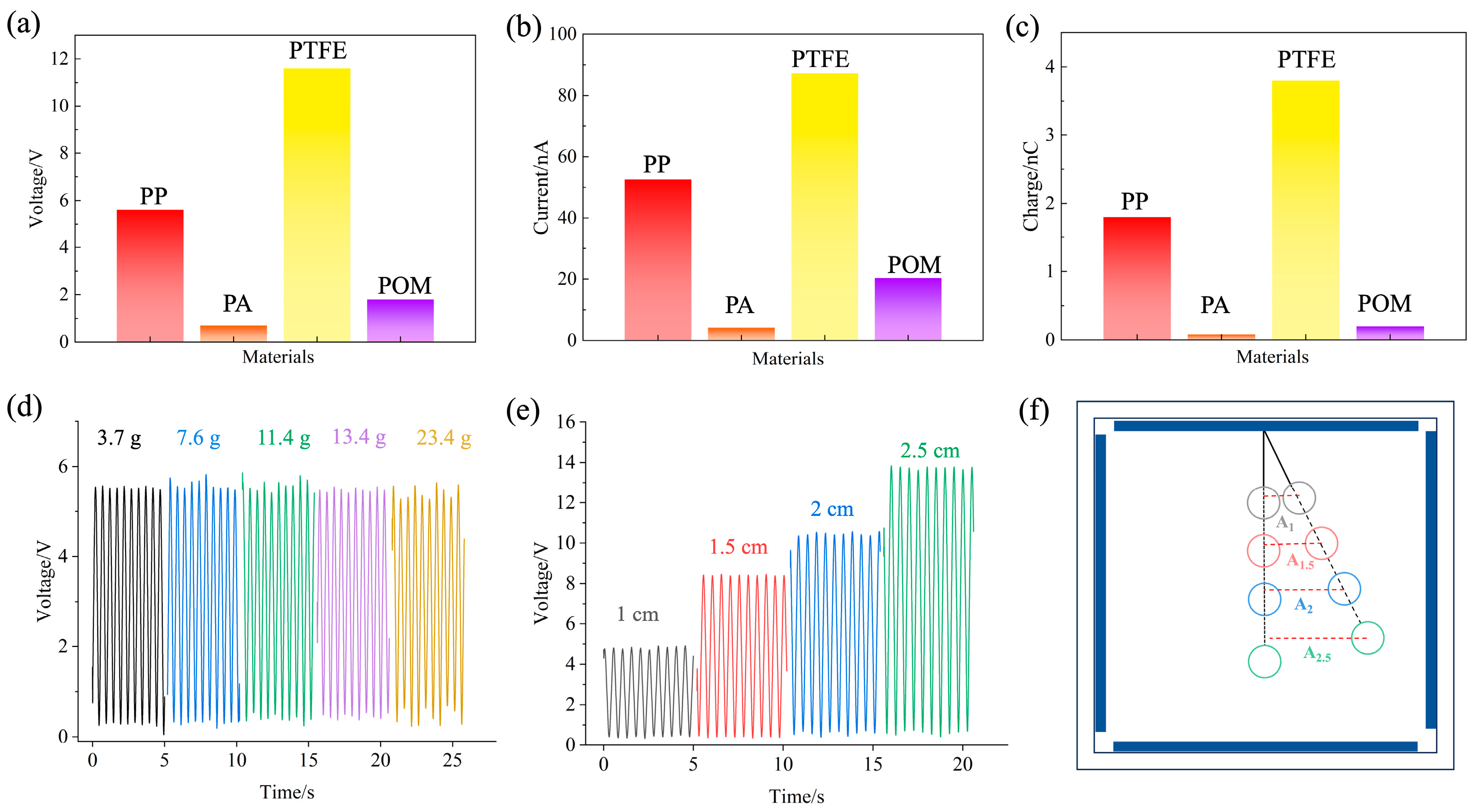
3.1. Influence of Structural Parameters on B-TENG Output Performance
3.2. Effect of Vibration Parameters on B-TENG Output Performance
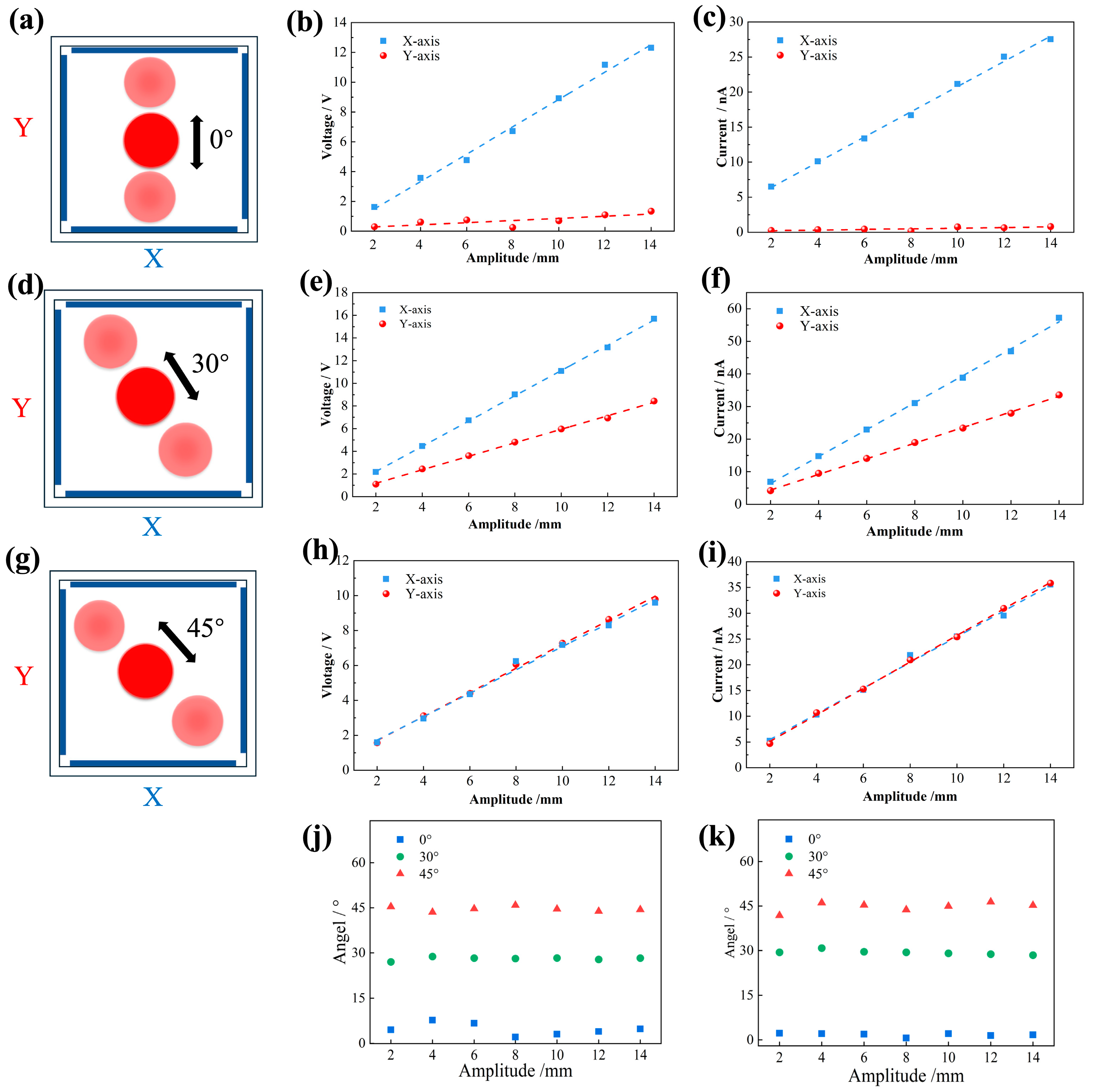
3.3. Comparative Analysis of B-TENG Vibration Response Experiments
4. Conclusions
- (1)
- The frequency of the electrical signal output by the B-TENG corresponds closely to the vibration frequency; once the structural parameters are determined, there exists a constant resonant frequency at which the output electrical signal is significantly enhanced.
- (2)
- Prior to the contact between the charged PTFE ball and the Al electrodes on both sides, the voltage magnitude maintains a good linear relationship with the vibration amplitude. After contact, the magnitude of the characteristic electrical signal between the electrodes remains essentially constant.
- (3)
- In a non-contact state, the mass of the PTFE ball has no effect on its output electrical signal, whereas the length of the polyester rope has a significant impact. Therefore, the appropriate rope length should be chosen based on actual needs.
- (4)
- By analyzing and processing the electrical signals from the B-TENG, the precise detection of vibration amplitude, frequency, and direction can be achieved, with minimal errors of 0.67%, 4.4%, and 5%, respectively. The accuracy of the B-TENG is 0.1 Hz, 0.97 V/mm, 1.5°.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, X.P.; Qu, C.J.; Song, Q.; Li, Y.H.; Liu, J. Coupled cross-flow and in-line vibration characteristics of frequency-locking of marine composite riser subjected to gas-liquid multiphase internal flow. Ocean Eng. 2022, 266, 113019. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Chiravatchradej, J.; Chucheepsakul, S. Nonlinear free vibrations of marine risers/pipes transporting fluid. Ocean Eng. 2005, 32, 417–440. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y.; Liu, Y.; Li, P.; Zhang, X.; Wang, F. Experimental and numerical simulation investigation on vortex-induced vibration test system based on bare fiber Bragg grating sensor technology for vertical riser. Int. J. Nav. Archit. Ocean Eng. 2021, 13, 223–235. [Google Scholar] [CrossRef]
- Liu, G.; Li, H.; Qiu, Z.; Leng, D.; Li, Z.; Li, W. A mini review of recent progress on vortex-induced vibrations of marine risers. Ocean Eng. 2020, 195, 106704. [Google Scholar] [CrossRef]
- Wu, J.; Yin, D.; Lie, H.; Riemer-Sørensen, S.; Sævik, S.; Triantafyllou, M. Improved VIV Response Prediction Using Adaptive Parameters and Data Clustering. J. Mar. Sci. Eng. 2020, 8, 127. [Google Scholar] [CrossRef]
- Lalam, N.; Lu, P.; Venketeswaran, A.; Buric, M.P. Pipeline Monitoring Using Highly Sensitive Vibration Sensor Based on Fiber Ring Cavity Laser. Sensors 2021, 21, 2078. [Google Scholar] [CrossRef]
- Zheng, G.; Xu, P.; Li, L.; Fan, X. Investigations of the Formation Mechanism and Pressure Pulsation Characteristics of Pipeline Gas-Liquid Slug Flows. J. Mar. Sci. Eng. 2024, 12, 590. [Google Scholar] [CrossRef]
- Ho, M.; El-Borgi, S.; Patil, D.; Song, G. Inspection and monitoring systems subsea pipelines: A review paper. Struct. Health Monit. 2020, 19, 606–645. [Google Scholar] [CrossRef]
- Yoon, J.; Lee, J.; Kim, G.; Ryu, S.; Park, J. Deep neural network-based structural health monitoring technique for real-time crack detection and localization using strain gauge sensors. Sci. Rep. 2022, 12, 20204. [Google Scholar] [CrossRef]
- Liu, G.; Wang, Q.A.; Jiao, G.; Dang, P.; Nie, G.; Liu, Z.; Sun, J. Review of Wireless RFID Strain Sensing Technology in Structural Health Monitoring. Sensors 2023, 23, 6925. [Google Scholar] [CrossRef]
- Ghadarah, N.; Ayre, D. A Review on Acoustic Emission Testing for Structural Health Monitoring of Polymer-Based Composites. Sensors 2023, 23, 6945. [Google Scholar] [CrossRef] [PubMed]
- Varga, M.; Haas, M.; Schneidhofer, C.; Adam, K. Wear intensity evaluation in conveying systems—An acoustic emission and vibration measurement approach. Tribol. Int. 2020, 149, 105549. [Google Scholar] [CrossRef]
- Cui, X.; Gao, Y.; Han, X. On the mixed acoustic and vibration sensors for the cross-correlation analysis of pipe leakage signals. Applied Acoustics 2024, 216, 109798. [Google Scholar] [CrossRef]
- Zhou, L.; Wang, P.; Zhang, C.; Qu, X.; Gao, C.; Xie, Y. Multi-mode fusion BP neural network model with vibration and acoustic emission signals for process pipeline crack location. Ocean Eng. 2022, 264, 112384. [Google Scholar] [CrossRef]
- Ren, L.; Jiang, T.; Jia, Z.-G.; Li, D.-S.; Yuan, C.-L.; Li, H.-N. Pipeline corrosion and leakage monitoring based on the distributed optical fiber sensing technology. Measurement 2018, 122, 57–65. [Google Scholar] [CrossRef]
- Bao, X.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed]
- Wijaya, H.; Rajeev, P.; Gad, E. Distributed optical fibre sensor for infrastructure monitoring: Field applications. Opt. Fiber Technol. 2021, 64, 102577. [Google Scholar] [CrossRef]
- Ran, Y.; Xia, L.; Han, Y.; Li, W.; Rohollahnejad, J.; Wen, Y.; Liu, D. Vibration Fiber Sensors Based on SM-NC-SM Fiber Structure. IEEE Photonics J. 2015, 7, 1–7. [Google Scholar] [CrossRef]
- Li, R.; Zhang, H.; Wang, L.; Liu, G. A Contact-Mode Triboelectric Nanogenerator for Energy Harvesting from Marine Pipe Vibrations. Sensors 2021, 21, 1514. [Google Scholar] [CrossRef]
- Zou, Y.; Sun, M.; Xu, W.; Zhao, X.; Du, T.; Sun, P.; Xu, M. Advances in Marine Self-Powered Vibration Sensor Based on Triboelectric Nanogenerator. J. Mar. Sci. Eng. 2022, 10, 1348. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Lin Wang, Z. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wang, X.; Yin, G.; Sun, T.; Xu, X.; Rasool, G.; Abbas, K. Mechanical Vibration Energy Harvesting and Vibration Monitoring Based on Triboelectric Nanogenerators. Energy Technol. 2024, 12, 2300931. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Y.; Xing, Y.; Han, L.; Chen, J.; Lu, X.; Yu, X.; Jiang, C. Anti-Self-Excited Oscillation Triboelectric Nanogenerators for Energy Harvesting of Aeolian Vibration in Transmission Line. Energy Technol. 2023, 11, 2300614. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s displacement current for energy and sensors: The origin of nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Wang, Z.L.; Wang, A.C. On the origin of contact-electrification. Mater. Today 2019, 30, 34–51. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Z.; Wang, G.; Liu, G.; Chen, J.; Pu, X.; Xi, Y.; Wang, X.; Guo, H.; Hu, C.; et al. Integrated charge excitation triboelectric nanogenerator. Nat. Commun. 2019, 10, 1426. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wu, C.; Dai, Y.; Zhao, Z.; Wang, A.; Zhang, T.; Wang, Z.L. Achieving ultrahigh triboelectric charge density for efficient energy harvesting. Nat. Commun. 2017, 8, 88. [Google Scholar] [CrossRef]
- Du, T.; Dong, F.; Xi, Z.; Zhu, M.; Zou, Y.; Sun, P.; Xu, M. Recent Advances in Mechanical Vibration Energy Harvesters Based on Triboelectric Nanogenerators. Small 2023, 19, e2300401. [Google Scholar] [CrossRef]
- Du, T.; Chen, Z.; Dong, F.; Cai, H.; Zou, Y.; Zhang, Y.; Sun, P.; Xu, M. Advances in Green Triboelectric Nanogenerators. Adv. Funct. Mater. 2024, 2313794. [Google Scholar] [CrossRef]
- Wang, S.; Liu, J.; Liu, B.; Wang, H.; Si, J.; Xu, P.; Xu, M. Potential Applications of Whisker Sensors in Marine Science and Engineering: A Review. J. Mar. Sci. Eng. 2023, 11, 2108. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, E.; Chen, T.; Wang, J.; Hu, Z.; Mi, J.; Pan, X.; Xu, M. A novel humidity resisting and wind direction adapting flag-type triboelectric nanogenerator for wind energy harvesting and speed sensing. Nano Energy 2020, 78, 105279. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X.; Chen, T.; Wang, H.; Zhu, C.; Yu, H.; Song, L.; Pan, X.; Mi, J.; Lee, C.; et al. An underwater flag-like triboelectric nanogenerator for harvesting ocean current energy under extremely low velocity condition. Nano Energy 2021, 90, 106503. [Google Scholar] [CrossRef]
- Qu, X.; Liu, Z.; Tan, P.; Wang, C.; Liu, Y.; Feng, H.; Luo, D.; Li, Z.; Wang, Z.L. Artificial tactile perception smart finger for material identification based on triboelectric sensing. Sci. Adv. 2022, 8, eabq2521. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Xiao, X.; Xu, P.; Zhao, T.; Song, L.; Pan, X.; Mi, J.; Xu, M.; Wang, Z.L. Dual-Tube Helmholtz Resonator-Based Triboelectric Nanogenerator for Highly Efficient Harvesting of Acoustic Energy. Adv. Energy Mater. 2019, 9, 1902824. [Google Scholar] [CrossRef]
- Zhao, C.; Du, T.; Ge, B.; Xi, Z.; Qian, Z.; Wang, Y.; Wang, J.; Dong, F.; Shen, D.; Zhan, Z.; et al. Coaxial Flexible Fiber-Shaped Triboelectric Nanogenerator Assisted by Deep Learning for Self-Powered Vibration Monitoring. Small 2023, e2307680. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Wang, P.; Wang, Y.C.; Zhang, S.L.; Wang, A.C.; Zhang, C.; Wang, Z.; Pan, X.; Wang, Z.L. A Soft and Robust Spring Based Triboelectric Nanogenerator for Harvesting Arbitrary Directional Vibration Energy and Self-Powered Vibration Sensing. Adv. Energy Mater. 2017, 8, 1702432. [Google Scholar] [CrossRef]
- Zhao, H.; Shu, M.; Ai, Z.; Lou, Z.; Sou, K.W.; Lu, C.; Jin, Y.; Wang, Z.; Wang, J.; Wu, C.; et al. A Highly Sensitive Triboelectric Vibration Sensor for Machinery Condition Monitoring. Adv. Energy Mater. 2022, 12, 2201132. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, C.; Pang, H.; Zhao, Z.; Zhang, Q.; Li, X.; Wang, X.; Lin, F.; Li, B.; Pan, X. Ultra-Wide Range Vibration Frequency Detection Sensors Based on Elastic Steel Triboelectric Nanogenerators for Intelligent Machinery Monitoring. Nanomaterials 2022, 12, 2790. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Yin, G.; Sun, T.; Rasool, G.; Abbas, K. Triboelectric Nanogenerator with a Rotational Freestanding Mode for Multi-directional Vibration Energy Harvesting. ACS Appl. Energy Mater. 2023, 6, 7607–7619. [Google Scholar] [CrossRef]
- Huang, K.; Zhou, Y.; Zhang, Z.; Zhang, H.; Lü, C.; Luo, J.; Shen, L. A real-time quantitative acceleration monitoring method based on triboelectric nanogenerator for bridge cable vibration. Nano Energy 2023, 118, 108960. [Google Scholar] [CrossRef]
- Wu, P.; Wang, F.; Xu, S.; Liu, T.; Qi, Y.; Zhao, X.; Zhang, C.; Mu, X. A Highly Sensitive Triboelectric Quasi-Zero Stiffness Vibration Sensor with Ultrawide Frequency Response. Adv. Sci. 2023, 10, 2301199. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Niu, S.; Yang, J.; Lin, L.; Wang, Z.L. Quantitative Measurements of Vibration Amplitude Using a Contact-Mode Freestanding Triboelectric Nanogenerator. ACS Nano 2014, 8, 12004–12013. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Huang, H.; Li, R.; Fan, C. Research on the Potential of Spherical Triboelectric Nanogenerator for Collecting Vibration Energy and Measuring Vibration. Sensors 2020, 20, 1063. [Google Scholar] [CrossRef] [PubMed]
- Du, T.; Zuo, X.; Dong, F.; Li, S.; Mtui, A.E.; Zou, Y.; Zhang, P.; Zhao, J.; Zhang, Y.; Sun, P.; et al. A Self-Powered and Highly Accurate Vibration Sensor Based on Bouncing-Ball Triboelectric Nanogenerator for Intelligent Ship Machinery Monitoring. Micromachines 2021, 12, 218. [Google Scholar] [CrossRef] [PubMed]
- Niu, S.; Liu, Y.; Chen, X.; Wang, S.; Zhou, Y.S.; Lin, L.; Xie, Y.; Wang, Z.L. Theory of freestanding triboelectric-layer-based nanogenerators. Nano Energy 2015, 12, 760–774. [Google Scholar] [CrossRef]
- Zhang, C.; Tang, W.; Han, C.; Fan, F.; Wang, Z.L. Theoretical Comparison, Equivalent Transformation, and Conjunction Operations of Electromagnetic Induction Generator and Triboelectric Nanogenerator for Harvesting Mechanical Energy. Adv. Mater. 2014, 26, 3580–3591. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Working Principle | Structure/Mode | Detection Parameters | SNR/Accuracy |
|---|---|---|---|---|
| [18] | optical fiber | Fiber Ring Cavity Laser | Frequency: 100–400 kHz | 50 dB at 3 kHz |
| [6] | optical fiber | Single mode–no core–single mode | Frequency: 100–29 kHz | 40 dB at 500 Hz |
| [42] | TENG | Contact-mode freestanding | Frequency: 1–15 Hz Amplitude: 0–16 mm | Not stated |
| [43] | TENG | Freestanding layer mode | Frequency: 1–8 Hz | Not stated |
| [44] | TENG | Freestanding layer mode | Frequency: 1–15 Hz Amplitude: 0.5–8 mm | 34.5 dB at 10 Hz |
| This work | TENG | Freestanding layer mode | Frequency: 1–5 Hz Amplitude: 2–14 mm Angle: 0°, 30°, 45°, 60° | 0.1 Hz, 0.97 V/mm, and 1.5° at 1–5 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Wei, B.; Ling, Z.; Yang, F.; Pang, H. A Low-Frequency Vibration Sensor Based on Ball Triboelectric Nanogenerator for Marine Pipeline Condition Monitoring. Sensors 2024, 24, 3817. https://doi.org/10.3390/s24123817
Huang X, Wei B, Ling Z, Yang F, Pang H. A Low-Frequency Vibration Sensor Based on Ball Triboelectric Nanogenerator for Marine Pipeline Condition Monitoring. Sensors. 2024; 24(12):3817. https://doi.org/10.3390/s24123817
Chicago/Turabian StyleHuang, Xili, Bin Wei, Ziyun Ling, Fang Yang, and Hongchen Pang. 2024. "A Low-Frequency Vibration Sensor Based on Ball Triboelectric Nanogenerator for Marine Pipeline Condition Monitoring" Sensors 24, no. 12: 3817. https://doi.org/10.3390/s24123817