
Downlink Transmissions of UAV-RIS-Assisted Cell-Free Massive MIMO Systems: Location and Trajectory Optimization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
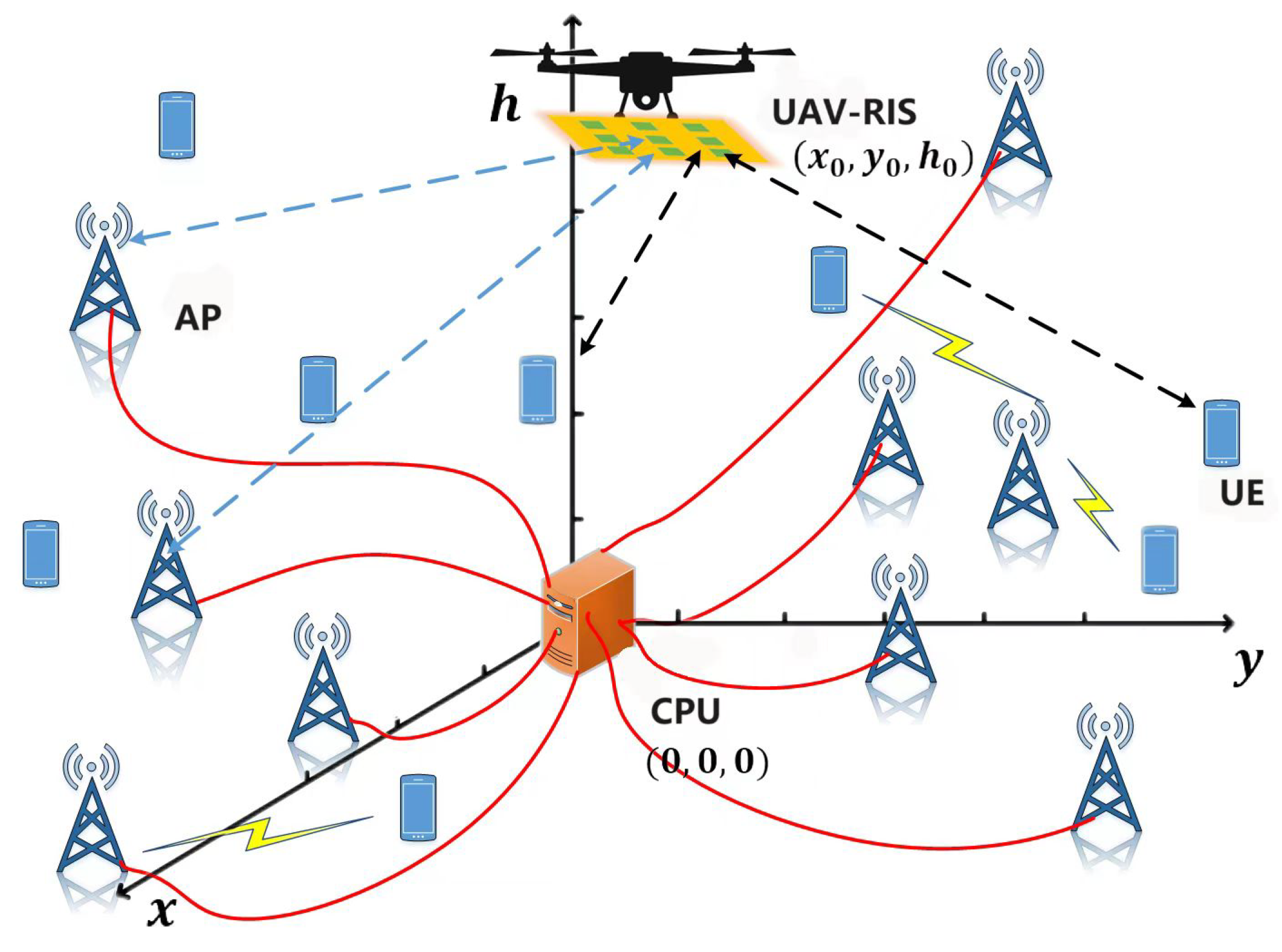
2. System Model
3. Downlink Transmissions
4. UAV-RIS Optimization
4.1. Location and Phase-Shift Optimization
4.1.1. Fix and Solve
4.1.2. Fix and Solve
4.1.3. Complete Algorithm
| Algorithm 1 Alternating Optimization Algorithm for . |
|
4.2. Trajectory Optimization
5. Numerical Results
5.1. Parameters and Setup
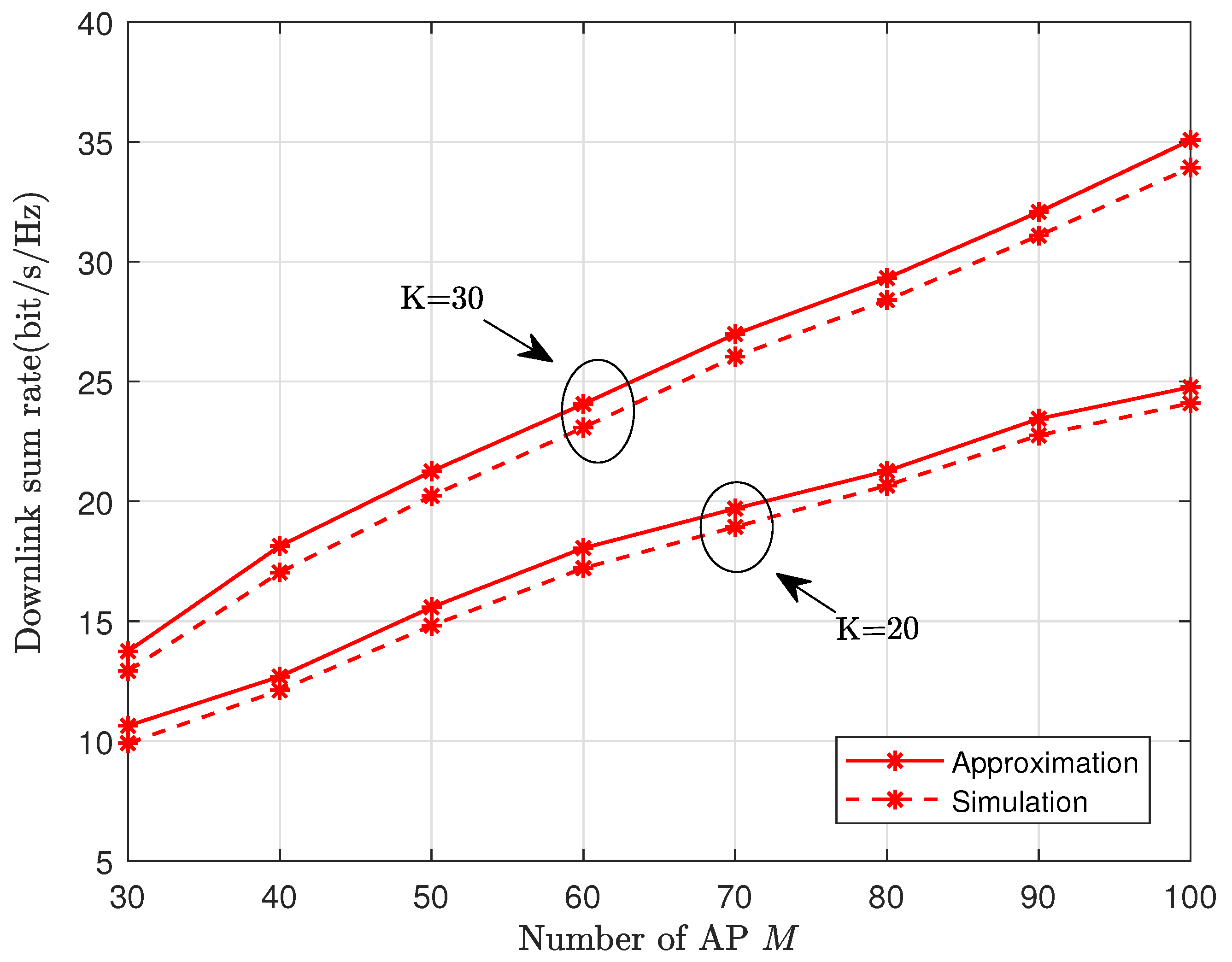
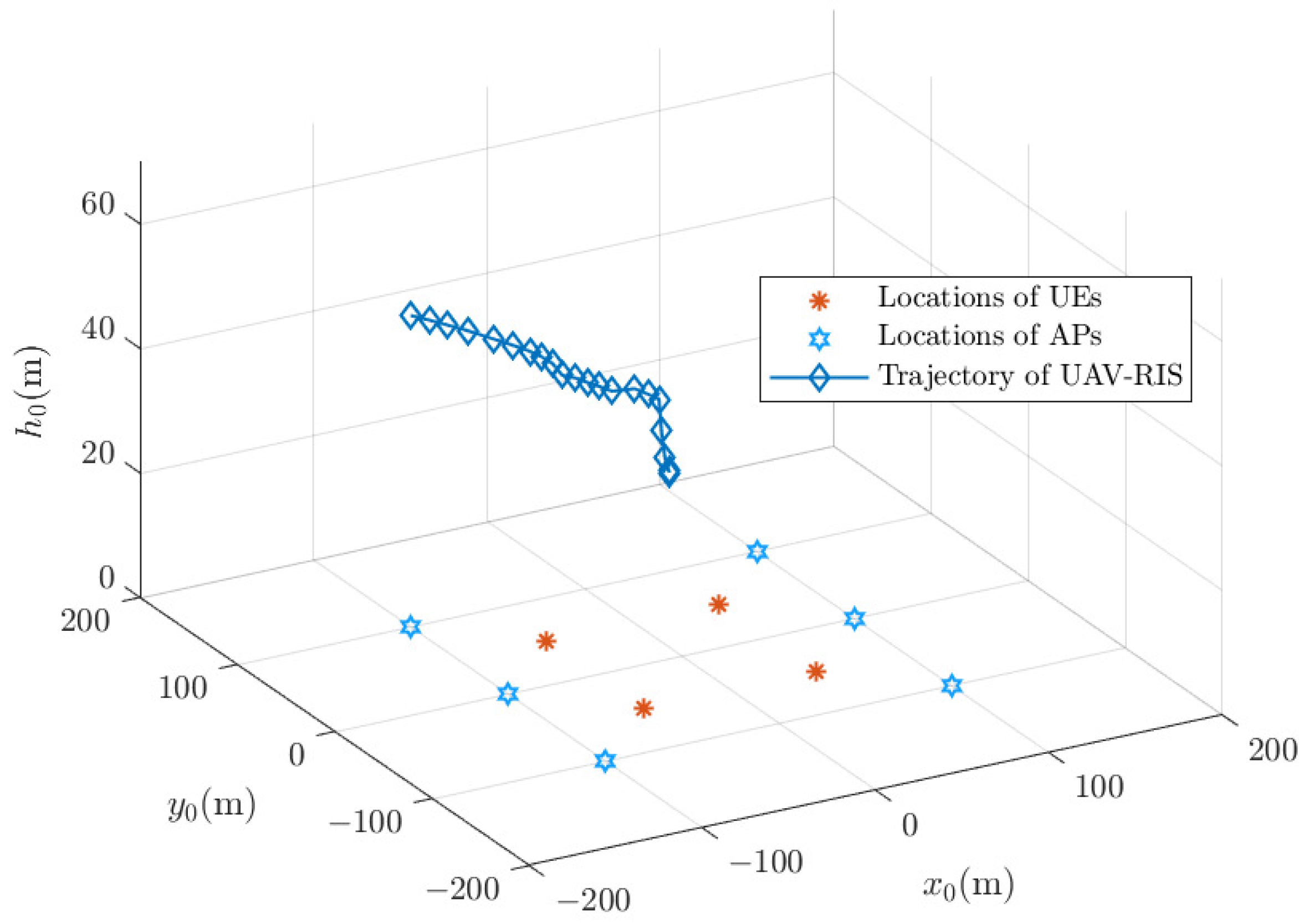
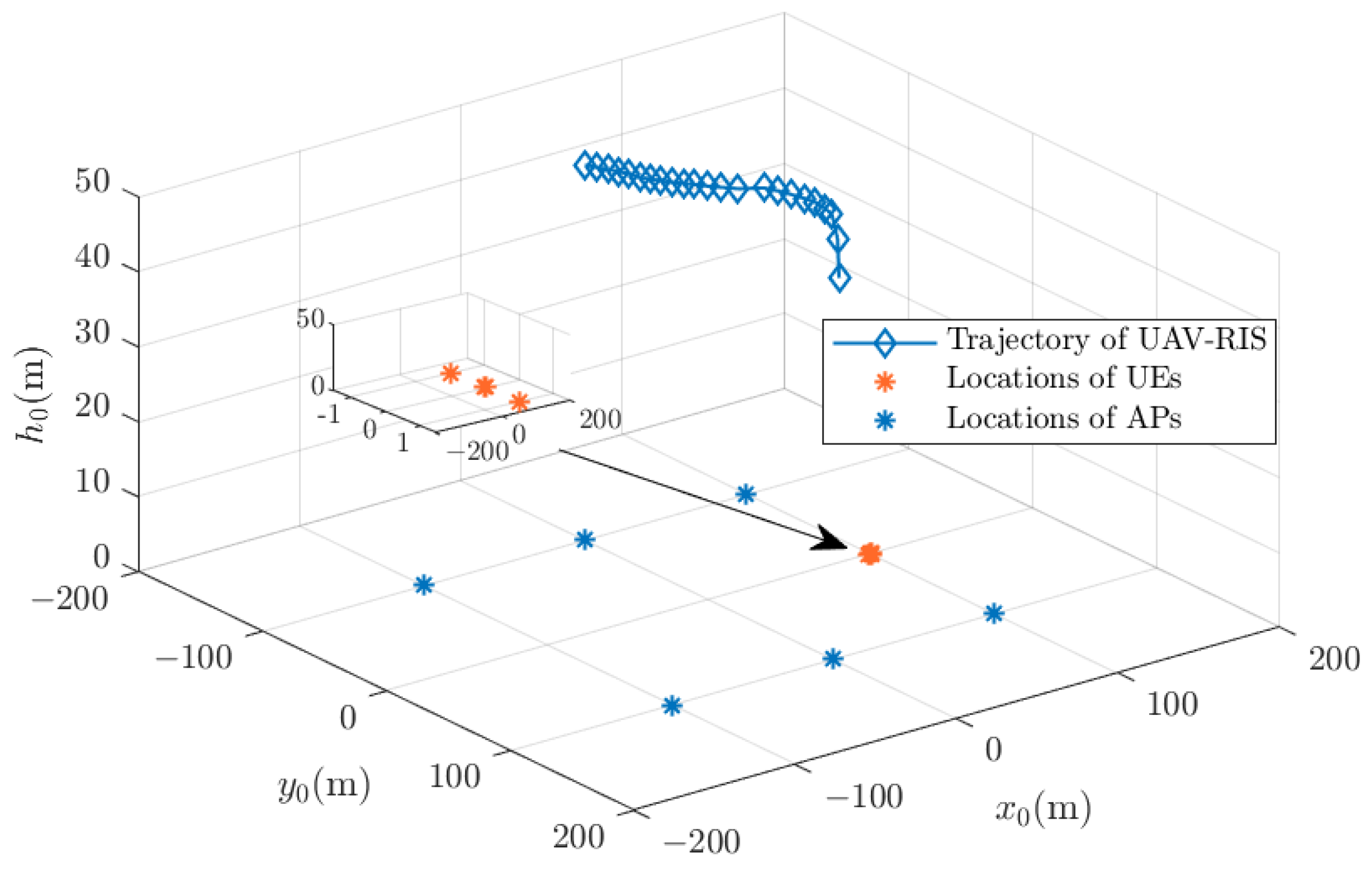
5.2. Performance Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
- The following abbreviations are used in this manuscript:
| CF-mMIMO | Cell-free massive multiple-input multiple-output |
| RIS | Reconfigurable intelligent surface |
| UAV | Unmanned aerial vehicle |
| AP | Access point |
| UE | User equipment |
| CPU | Central processing unit |
| LoS | Line-of-sight |
| NLoS | Non-LoS |
| CSI | Channel state information |
Appendix A. Proof of Theorem 1
References
- Ning, B.; Tian, Z.; Mei, W.; Chen, Z.; Han, C.; Li, S.; Zhang, R. Beamforming Technologies for Ultra-Massive MIMO in Terahertz Communications. IEEE Open J. Commun. Soc. 2023, 4, 614–658. [Google Scholar] [CrossRef]
- Dreifuerst, R.M.; Heath, R.W. Massive MIMO in 5G: How beamforming codebooks and feedback enable larger arrays. IEEE Commun. Mag. 2023, 61, 18–23. [Google Scholar] [CrossRef]
- Yu, W.; Shen, Y.; He, H.; Yu, X.; Song, S.; Zhang, J.; Letaief, K.B. An adaptive and robust deep learning framework for THz ultra-massive MIMO channel estimation. IEEE J. Sel. Top. Signal Process. 2023, 17, 761–776. [Google Scholar] [CrossRef]
- Ngo, H.Q.; Ashikhmin, A.; Yang, H.; Larsson, E.G.; Marzetta, T.L. Cell-Free Massive MIMO Versus Small Cells. IEEE Trans. Wireless Commun. 2017, 16, 1834–1850. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L. A Joint Precoding Framework for Wideband Reconfigurable Intelligent Surface-Aided Cell-Free Network. IEEE Trans. Signal Process. 2021, 69, 4085–4101. [Google Scholar] [CrossRef]
- Demir, T.; Masoudi, M.; Björnson, E.; Cavdar, C. Cell-Free Massive MIMO in O-RAN: Energy-Aware Joint Orchestration of Cloud, Fronthaul, and Radio Resources. IEEE J. Sel. Areas Commun 2024, 42, 356–372. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, S.; Lin, Y.; Zheng, J.; Ai, B.; Hanzo, L. Cell-free massive MIMO: A new next-generation paradigm. IEEE Access 2019, 7, 99878–99888. [Google Scholar] [CrossRef]
- Ngo, H.Q.; Tran, L.N.; Duong, T.Q.; Matthaiou, M.; Larsson, E.G. On the Total Energy Efficiency of Cell-Free Massive MIMO. IEEE Trans. Green Commun. Netw. 2018, 2, 25–39. [Google Scholar] [CrossRef]
- Lancho, A.; Durisi, G.; Sanguinetti, L. Cell-Free Massive MIMO for URLLC: A Finite-Blocklength Analysis. IEEE Trans. Wireless Commun. 2023, 22, 8723–8735. [Google Scholar] [CrossRef]
- Tang, W.; Dai, J.Y.; Chen, M.Z.; Wong, K.K.; Li, X.; Zhao, X.; Jin, S.; Cheng, Q.; Cui, T.J. MIMO Transmission Through Reconfigurable Intelligent Surface: System Design, Analysis, and Implementation. IEEE J. Sel. Areas Commun. 2020, 38, 2683–2699. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef]
- Emenonye, D.R.; Dhillon, H.S.; Buehrer, R.M. Fundamentals of RIS-Aided Localization in the Far-Field. IEEE Trans. Wireless Commun. 2023, 23, 3408–3424. [Google Scholar] [CrossRef]
- Wang, R.; Yang, Y.; Makki, B.; Shamim, A. A Wideband Reconfigurable Intelligent Surface for 5G Millimeter-Wave Applications. IEEE Trans. Antennas Propagat. 2024, 72, 2399–2410. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable Intelligent Surfaces for Energy Efficiency in Wireless Communication. IEEE Trans. Wireless Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef]
- Yang, S.; Xie, C.; Lyu, W.; Ning, B.; Zhang, Z.; Yuen, C. Near-Field Channel Estimation for Extremely Large-Scale Reconfigurable Intelligent Surface (XL-RIS)-Aided Wideband mmWave Systems. IEEE J. Sel. Areas Commun. 2024, 42, 1567–1582. [Google Scholar] [CrossRef]
- Tang, W.; Li, X.; Dai, J.Y.; Jin, S.; Zeng, Y.; Cheng, Q.; Cui, T.J. Wireless communications with programmable metasurface: Transceiver design and experimental results. China Commun. 2019, 16, 46–61. [Google Scholar] [CrossRef]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.S.; Yuen, C.; de Rosny, J.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How It Works, State of Research, and The Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Zhang, R.; Zhang, Q.; Zhu, H. RIS-assisted cell-free massive MIMO systems with reflection area: AP number reduction. Phys. Commun. 2022, 55, 99878–99888. [Google Scholar] [CrossRef]
- Li, J.; Liu, J. Sum Rate Maximization via Reconfigurable Intelligent Surface in UAV Communication: Phase Shift and Trajectory Optimization. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Chongqing, China, 9–11 August 2020. [Google Scholar]
- Liu, X.; Yu, Y.; Li, F.; Durrani, T.S. Throughput Maximization for RIS-UAV Relaying Communications. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19569–19574. [Google Scholar] [CrossRef]
- Zhou, T.; Xu, K.; Xia, X.; Xie, W.; Xu, J. Achievable Rate Optimization for Aerial Intelligent Reflecting Surface-Aided Cell-Free Massive MIMO System. IEEE Access 2021, 9, 3828–3837. [Google Scholar] [CrossRef]
- Huang, C.; Chen, G.; Wen, Y.; Lin, Z.; Xiao, Y.; Xiao, P. Deep Learning-Based Resource Allocation in UAV-RIS-Aided Cell-Free Hybrid NOMA/OMA Networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Kuala Lumpur, Malaysia, 4–8 December 2023. [Google Scholar]
- Ngo, H.Q.; Tataria, H.; Matthaiou, M.; Jin, S.; Larsson, E.G. On the Performance of Cell-Free Massive MIMO in Ricean Fading. In Proceedings of the Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 980–984. [Google Scholar]
- Wang, J.; Wang, H.; Han, Y.; Jin, S.; Li, X. Joint Transmit Beamforming and Phase Shift Design for Reconfigurable Intelligent Surface Assisted MIMO Systems. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 354–368. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, S.; Wong, K.K.; Zhu, H.; Matthaiou, M. Power Scaling of Uplink Massive MIMO Systems with Arbitrary-Rank Channel Means. IEEE J. Sel. Top. Sign. Proces. 2014, 8, 966–981. [Google Scholar] [CrossRef]
- Bashar, M.; Cumanan, K.; Burr, A.G.; Xiao, P.; Di Renzo, M. On the Performance of Reconfigurable Intelligent Surface-Aided Cell-Free Massive MIMO Uplink. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Taipei, Taiwan, 7–11 December 2020. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang , Q.; Zhao , J.; Zhang , R.; Yang , L. Downlink Transmissions of UAV-RIS-Assisted Cell-Free Massive MIMO Systems: Location and Trajectory Optimization. Sensors 2024, 24, 4064. https://doi.org/10.3390/s24134064
Zhang Q, Zhao J, Zhang R, Yang L. Downlink Transmissions of UAV-RIS-Assisted Cell-Free Massive MIMO Systems: Location and Trajectory Optimization. Sensors. 2024; 24(13):4064. https://doi.org/10.3390/s24134064
Chicago/Turabian StyleZhang , Qi, Jie Zhao , Rongcheng Zhang , and Longxiang Yang . 2024. "Downlink Transmissions of UAV-RIS-Assisted Cell-Free Massive MIMO Systems: Location and Trajectory Optimization" Sensors 24, no. 13: 4064. https://doi.org/10.3390/s24134064
APA StyleZhang , Q., Zhao , J., Zhang , R., & Yang , L. (2024). Downlink Transmissions of UAV-RIS-Assisted Cell-Free Massive MIMO Systems: Location and Trajectory Optimization. Sensors, 24(13), 4064. https://doi.org/10.3390/s24134064