
Self-Sensing Electromechanical System Integrated with the Embedded Displacement Sensor


Abstract
:1. Introduction
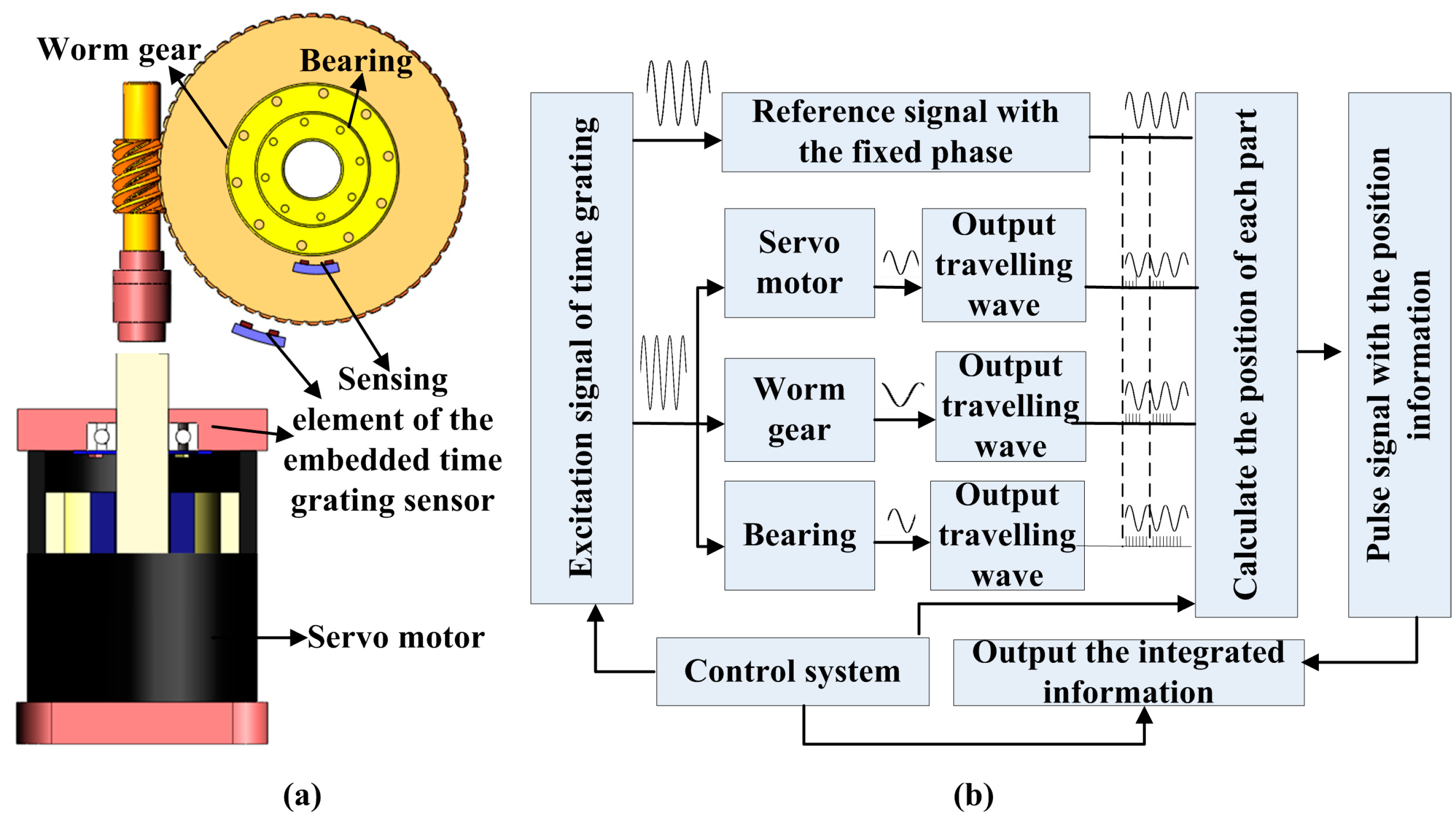
2. Working Scheme of the Integrated Electromechanical System
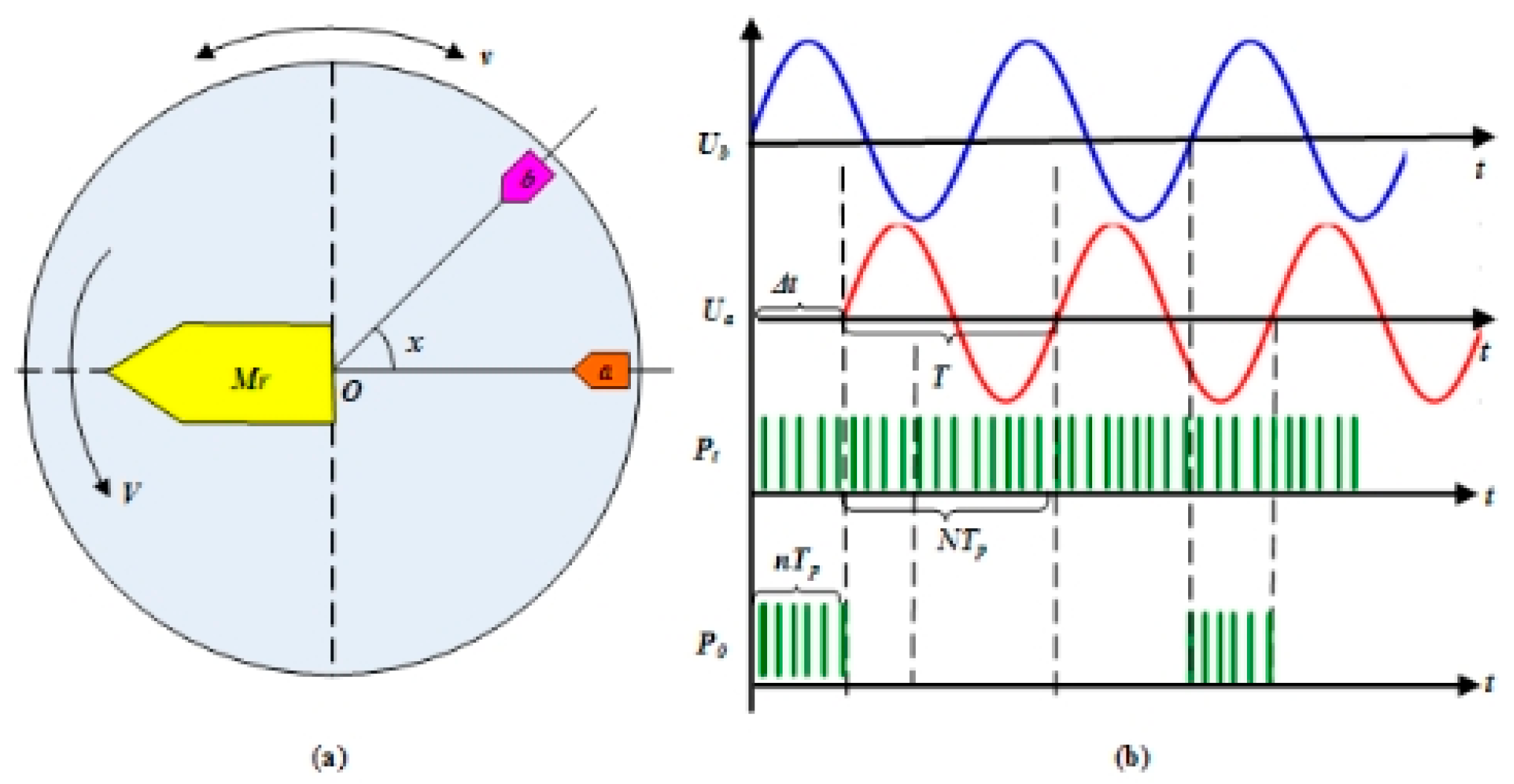
2.1. Detection Principle of the Electromechanical System
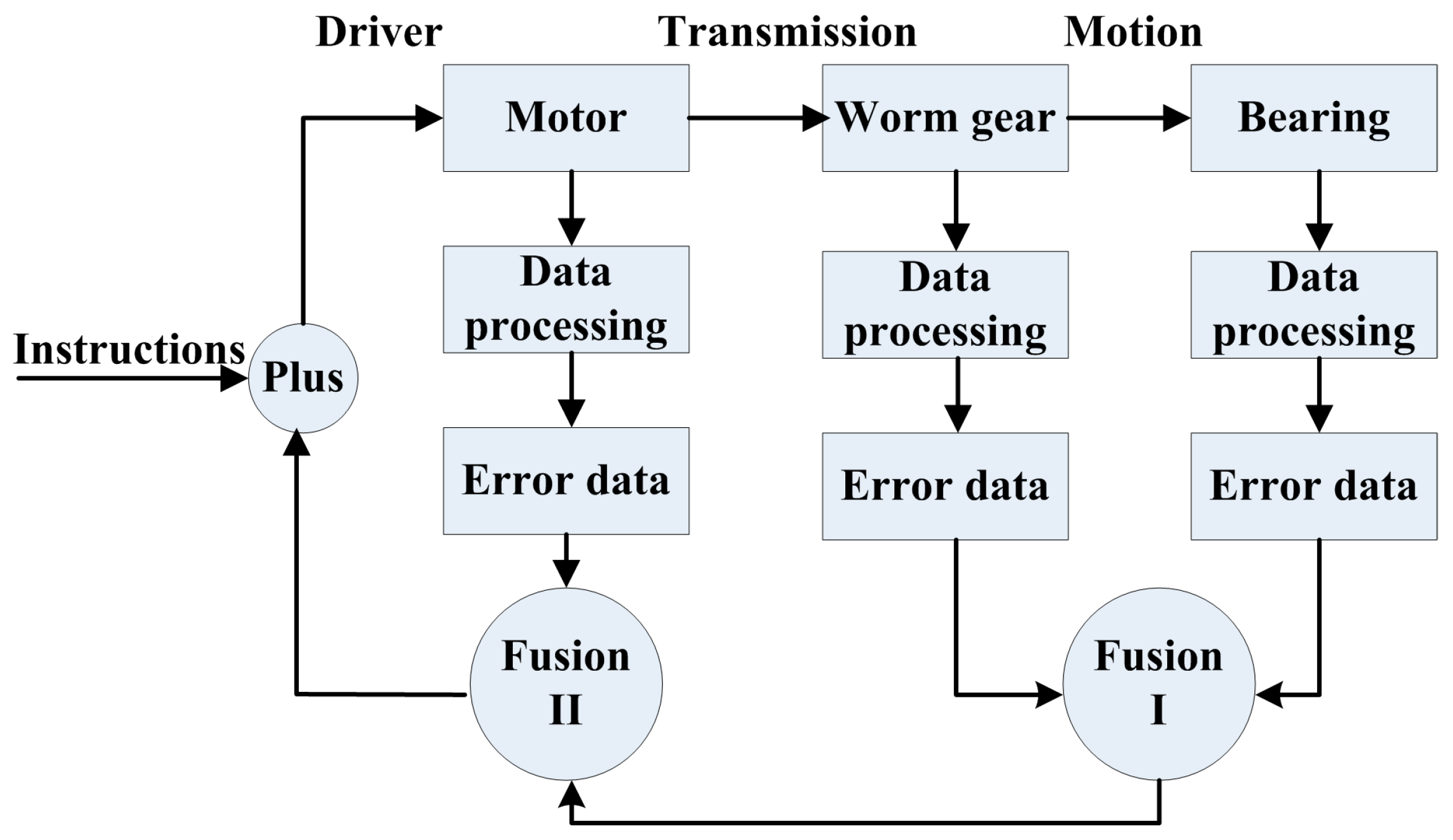
2.2. Multi-Head Information Fusion Technology Based on Adaptive Weighted Average
3. Prototype of Embedded Sensing Head
3.1. Embedded Sensing Head Based on Coils
3.2. Embedded Sensing Head Based on Magnetic Element
4. Experiment Results and Analysis
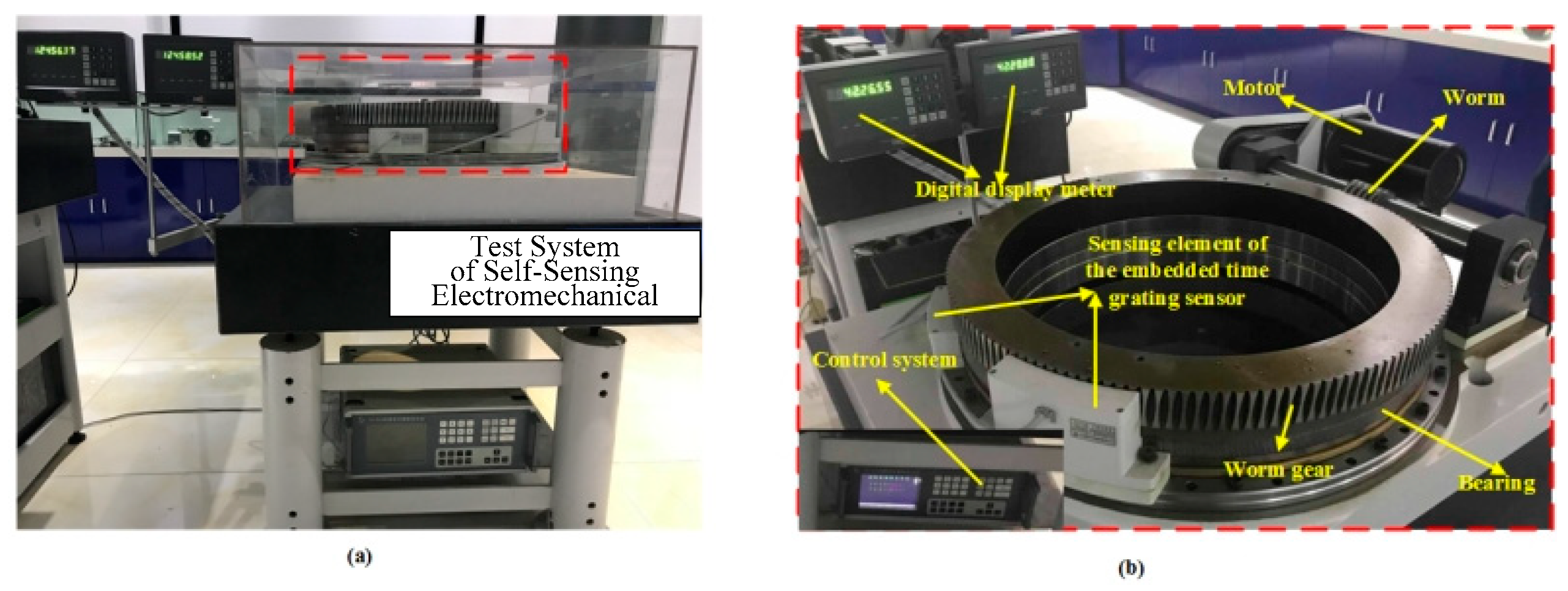
4.1. Self-Sensing Electromechanical System
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, B.; Bai, K.J. Digital twin-based sustainable intelligent manufacturing: A review. Adv. Manuf. 2024, 9, 1–21. [Google Scholar] [CrossRef]
- Lei, J.; Zhang, Q.; Song, Y.; Tang, J.; Tong, J.; Peng, F.; Xiao, H. Laser-assisted embedding of all-glass optical fiber sensors into bulk ceramics for high-temperature applications. Opt. Laser Technol. 2020, 128, 106223. [Google Scholar] [CrossRef] [PubMed]
- Bian, Q.; Podhrazsky, A.; Bauer, C.; Stadler, A.; Buchfellner, F.; Kuttler, R.; Jakobi, M.; Volk, W.; Koch, A.W.; Roths, J. Temperature and external strain sensing with metal-embedded optical fiber sensors for structural health monitoring. Opt. Express 2022, 30, 33449–33464. [Google Scholar] [CrossRef] [PubMed]
- Alonso Romero, A.; Amouzou, K.N.; Sengupta, D.; Zimmermann, C.A.; Richard-Denis, A.; Mac-Thiong, J.M.; Petit, Y.; Lina, J.M.; Ung, B. Optoelectronic Pressure Sensor Based on the Bending Loss of Plastic Optical Fibers Embedded in Stretchable Polydimethylsiloxane. Sensors 2023, 23, 3322. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wang, C.; Chen, Y.; Xiang, Y.; Huang, T.; Shum, P.P.; Wu, Z. Fiber structures and material science in optical fiber magnetic field sensors. Front. Optoelectron. 2022, 15, 33–50. [Google Scholar] [CrossRef] [PubMed]
- Yoo, J.; Li, S.; Kim, D.H.; Yang, J.; Choi, M.K. Materials and design strategies for stretchable electroluminescent devices. Nanoscalehorizons 2022, 7, 801–821. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wang, W.; Wu, X.; Lei, Y.; Cao, J.; Bowen, C.; Bader, S.; Yang, B. A comprehensive review on self-powered smart bearings. Renew. Sustain. Energy Rev. 2023, 183, 113446. [Google Scholar] [CrossRef]
- Shi, J.; Zhang, H.; Liu, X. Novel integrated position measurement unit for stepping motor servo control. Measurement 2011, 44, 80–87. [Google Scholar]
- Ma, C.; Zhou, S.; Yang, N.; Degano, M.; Gerada, C.; Fang, J.; Liu, Q. Characteristic analysis and direct measurement for air gap magnetic field of external rotor permanent magnet synchronous motors in electric vehicles. IET Electr. Power Appl. 2020, 14, 1784–1794. [Google Scholar] [CrossRef]
- Saha, S.; Kar, U. Signal-Based Position Sensor Fault Diagnosis Applied to PMSM Drives for Fault-Tolerant Operation in Electric Vehicles. World Electr. Veh. J. 2023, 14, 123. [Google Scholar] [CrossRef]
- Xu, Y.L.; Yao, M.; Sun, X.D. Overview of Position-Sensorless Technology for Permanent Magnet Synchronous Motor Systems. World Electr. Veh. J. 2023, 14, 212. [Google Scholar] [CrossRef]
- Kim, H.; Lee, K.; Bhattacharya, S. Improved EEMF-Based Position Sensorless Control for Non-sinusoidal Back-EMF PMSMs. J. Electr. Eng. Technol. 2022, 17, 1229–1238. [Google Scholar] [CrossRef]
- HEIDENHAIN ERA8000. Available online: https://www.heidenhain.co.za/en_ZA/products/angle-encoders/modular-angle-encoders-with-optical-scanning/era-8000/ (accessed on 10 June 2019).
- INA Bearing YRTC. Available online: https://www.schaeffler.de/content.schaeffler.de/en/news_media/media_library/publications/downloadcenter-global-pages/index.jsp?pubid=79505434&ppubid=86867776&tab=mediathpub&uid=79505436&subfilter=app:dc (accessed on 10 June 2019).
- Wang, H.; Peng, K.; Liu, X.; Yu, Z.; Chen, Z. Design and Realization of a Compact High-Precision Capacitive Absolute Angular Position Sensor Based on Time Grating. IEEE Trans. Ind. Electron. 2021, 68, 3548–3557. [Google Scholar] [CrossRef]
- Gao, W.Z.; Shi, H.; Tang, Q.F. A Contactless Planar Inductive Sensor for Absolute Angular Displacement Measurement. IEEE Access 2021, 9, 160878–160886. [Google Scholar] [CrossRef]
- Fu, M.; Peng, D.L.; Li, Y.; Lu, J. Study on the Time-Grating sensor method of the Static Light Field Type Based on Timing-Driven. Appl. Mech. Mater. 2014, 644, 1409–1413. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Value | Standard Deviation | Fusion Coefficient | |
|---|---|---|---|
| bearing | −5.75 × 10−4 | 0.0386 | 0.9843 |
| motor | 0.0354 | 0.0049 |
| Bearing | Worm Gear | Motor | |
|---|---|---|---|
| Average value | −5.75 × 10−4 | −0.0027 | — |
| Standard deviation | 0.0049 | −0.0103 | |
| Fusion coefficient | 0.182 | ||
| Average value of the fusion data | −9.522 × 10−4 | 0.0354 | |
| Standard deviation of the fusion data | 0.0041 | −0.0386 | |
| Fusion coefficient | 0.989 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Liu, S.; Su, Z.; Liu, L.; Tang, Z. Self-Sensing Electromechanical System Integrated with the Embedded Displacement Sensor. Sensors 2024, 24, 4102. https://doi.org/10.3390/s24134102
Wang S, Liu S, Su Z, Liu L, Tang Z. Self-Sensing Electromechanical System Integrated with the Embedded Displacement Sensor. Sensors. 2024; 24(13):4102. https://doi.org/10.3390/s24134102
Chicago/Turabian StyleWang, Shuxian, Shiyou Liu, Zuqiang Su, Linlin Liu, and Zhi Tang. 2024. "Self-Sensing Electromechanical System Integrated with the Embedded Displacement Sensor" Sensors 24, no. 13: 4102. https://doi.org/10.3390/s24134102