
Snow-CLOCs: Camera-LiDAR Object Candidate Fusion for 3D Object Detection in Snowy Conditions

Abstract
:1. Introduction
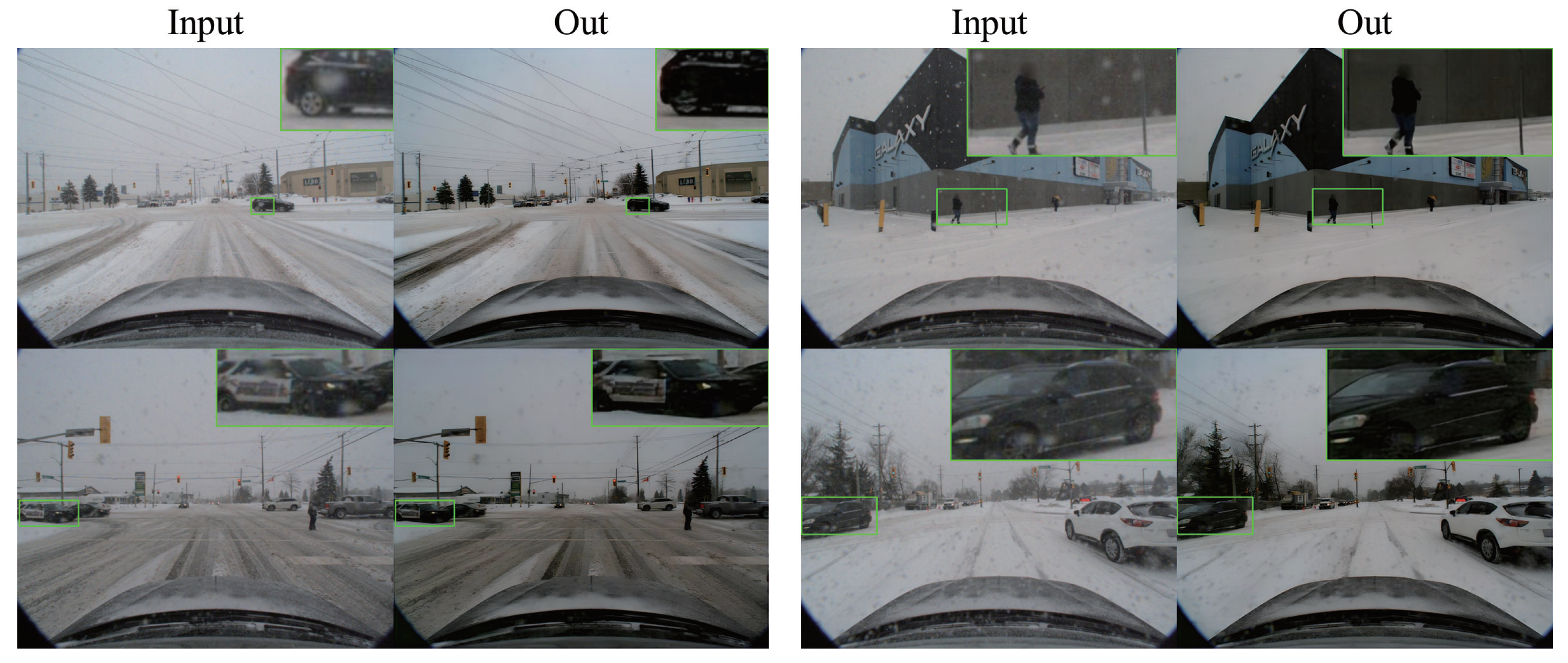
- To address the issue of image data distortion under adverse weather conditions, we introduce the DTCWT snow removal algorithm to process snowflakes in images and improve the quality of image data;
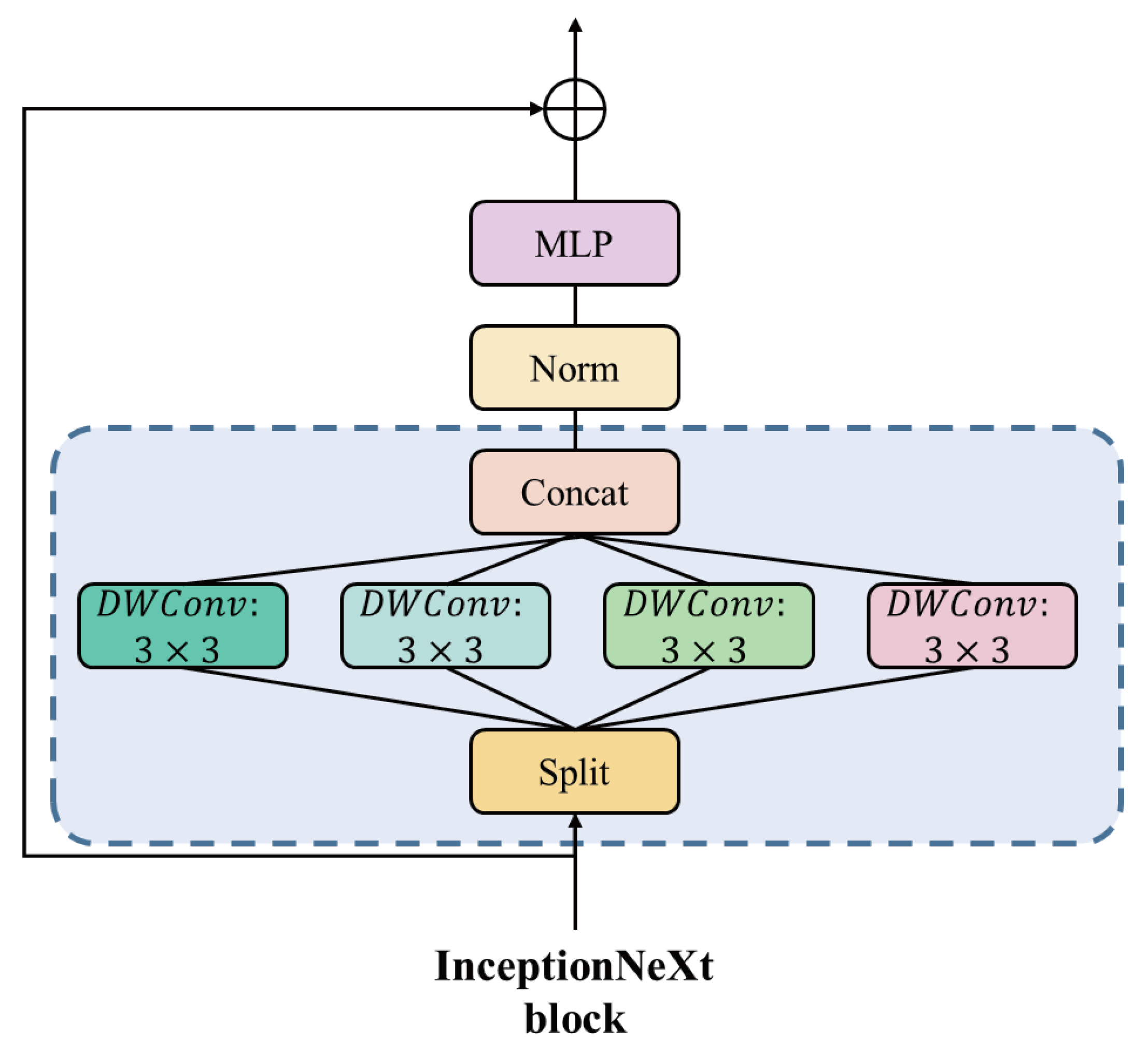
- We improve upon YOLOv5 by replacing InceptionNet with the backbone network and simultaneously incorporating Wise-IoU to enhance the accuracy of image object detection;
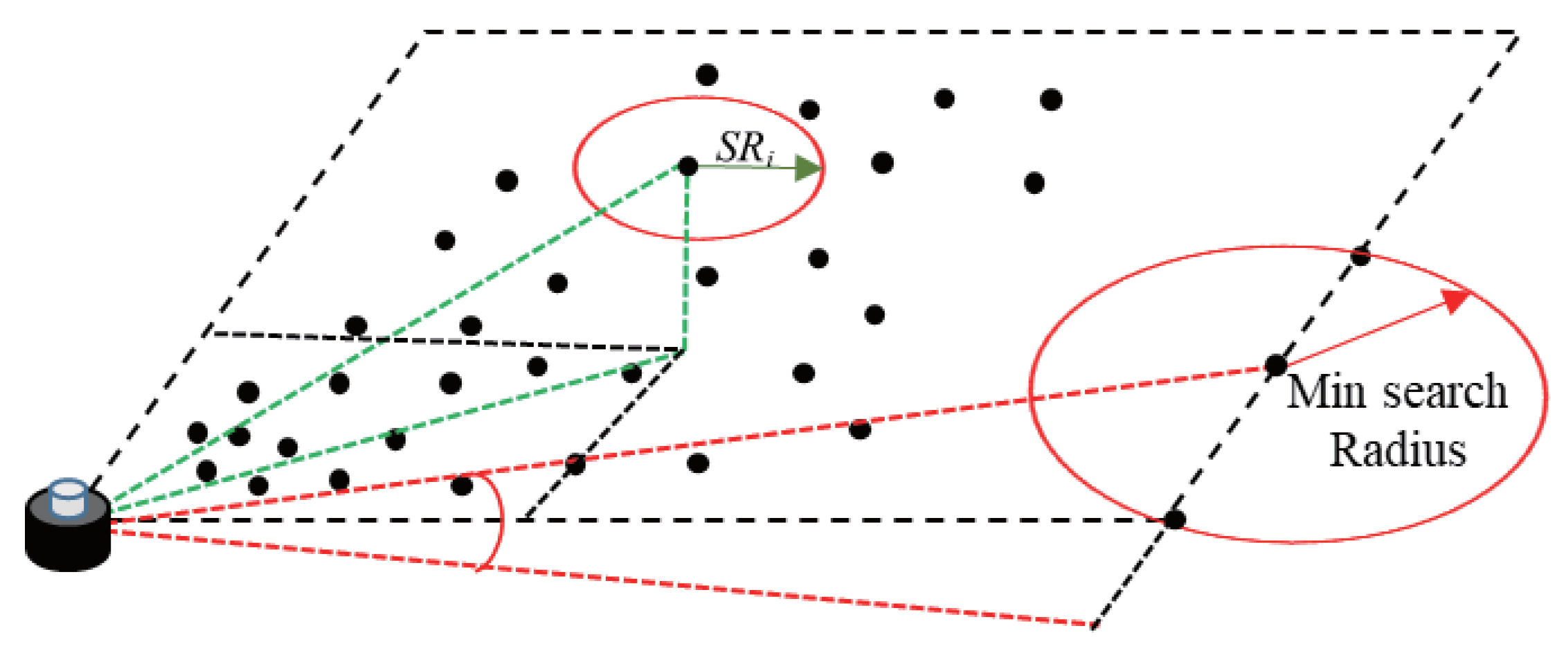
- To tackle the problem of point-cloud data being susceptible to snowflake interference under adverse weather conditions, we introduce the Dynamic Radius Outlier Removal (DROR) filtering algorithm to reduce point-cloud noise;
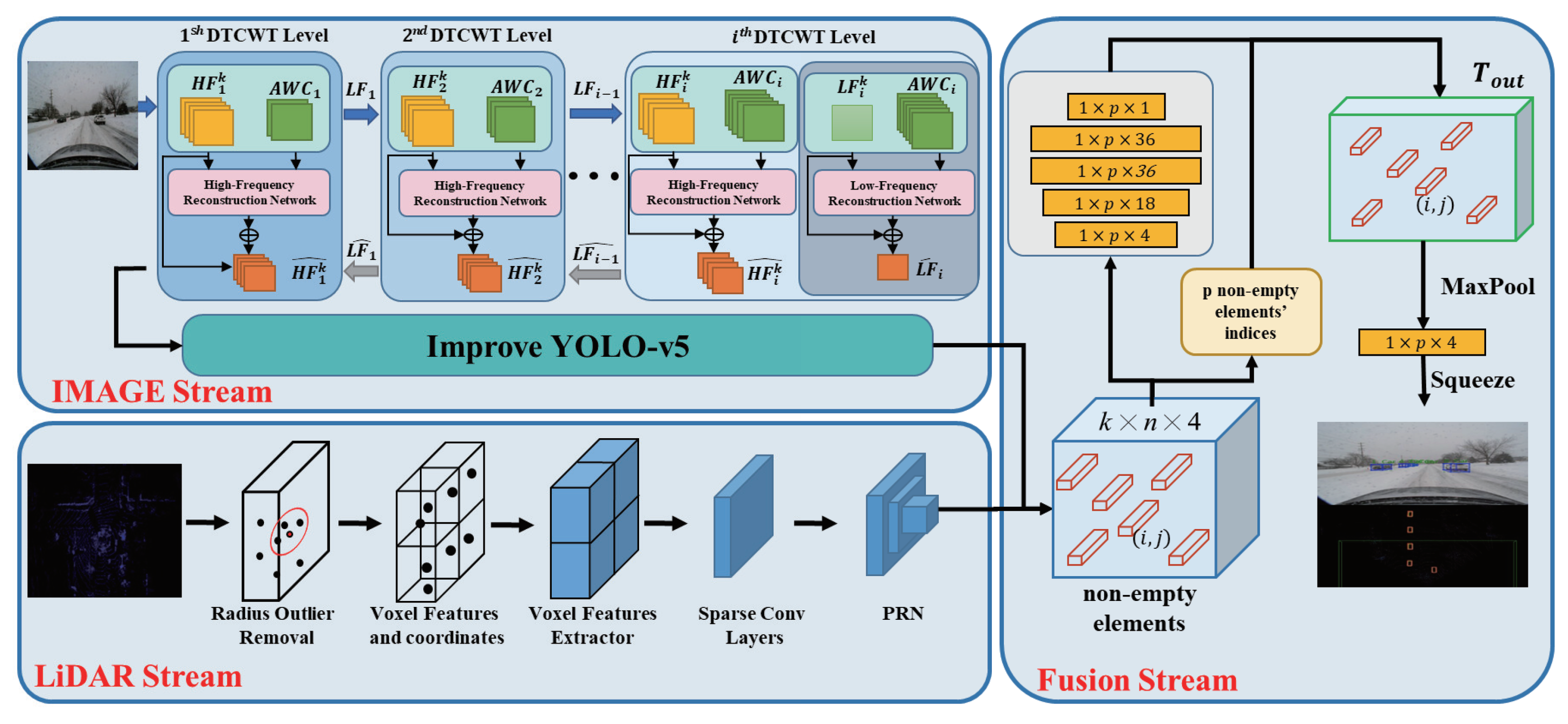
- Finally, we propose the Snow-CLOCs post-fusion algorithm, which combines the results of YOLOv5 and SECOND object detection to enhance the accuracy of object detection.
2. Related Work
2.1. Snowy-Weather Image Processing
2.2. Image-Based Object-Detection Algorithms
2.3. LiDAR-Based Object-Detection Algorithms
2.4. Multi-Sensor Fusion Object-Detection Algorithms
3. Approach
3.1. The Snowy-Weather Image-Processing Module
3.2. Image Object-Detection Module
3.3. LiDAR Point-Cloud Object-Detection Module
3.4. Multi-Sensor Fusion-Detection Module
4. Experiments
4.1. Dataset and Metric
4.2. Experiments Results
5. Results
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jocher, G.; Chaurasia, A.; Stoken, A.; Borovec, J.; Kwon, Y.; Michael, K.; Fang, J.; Yifu, Z.; Wong, C.; Montes, D. ultralytics/yolov5: v7. 0-yolov5 sota realtime instance segmentation. Zenodo 2022. [Google Scholar] [CrossRef]
- Wang, C.Y.; Yeh, I.H.; Liao, H.Y.M. YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. arXiv 2024, arXiv:2402.13616. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30, 5099–5108. [Google Scholar]
- Yan, Y.; Mao, Y.; Li, B. Second: Sparsely embedded convolutional detection. Sensors 2018, 18, 3337. [Google Scholar] [CrossRef] [PubMed]
- Shi, S.; Wang, X.; Li, H. PointRCNN: 3D Object Proposal Generation and Detection From Point Cloud. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 770–779. [Google Scholar] [CrossRef]
- Pei, S.-C.; Tsai, Y.-T.; Lee, C.-Y. Removing rain and snow in a single image using saturation and visibility features. In Proceedings of the 2014 IEEE International Conference on Multimedia and Expo Workshops (ICMEW), Chengdu, China, 14–18 July 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, S.; Chen, C.; Zeng, B. A Hierarchical Approach for Rain or Snow Removing in A Single Color Image. IEEE Trans. Image Process. 2017, 26, 3936–3950. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Zhao, Y.; Mou, Y.; Wu, J.; Han, L.; Yang, X.; Zhao, B. Content-Adaptive Rain and Snow Removal Algorithms for Single Image. In Proceedings of the International Symposium on Neural Networks, Hong Kong and Macao, China, 28 November–1 December 2014. [Google Scholar]
- Chen, W.T.; Fang, H.Y.; Ding, J.J.; Tsai, C.C.; Kuo, S.Y. JSTASR: Joint Size and Transparency-Aware Snow Removal Algorithm Based on Modified Partial Convolution and Veiling Effect Removal. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020. [Google Scholar]
- Li, Z.; Zhang, J.; Fang, Z.; Huang, B.; Jiang, X.; Gao, Y.; Hwang, J.N. Single Image Snow Removal via Composition Generative Adversarial Networks. IEEE Access 2019, 7, 25016–25025. [Google Scholar] [CrossRef]
- Liu, Y.F.; Jaw, D.W.; Huang, S.C.; Hwang, J.N. DesnowNet: Context-Aware Deep Network for Snow Removal. IEEE Trans. Image Process. 2018, 27, 3064–3073. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.; Liao, Y.; Guo, W.; Fu, X.; Ding, X. Single-image-based rain and snow removal using multi-guided filter. In Proceedings of the International Conference on Neural Information Processing, Daegu, Republic of Korea, 3–7 November 2013. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 28, 1137–1149. [Google Scholar] [CrossRef]
- Hnewa, M.; Radha, H. Multiscale domain adaptive yolo for cross-domain object detection. In Proceedings of the 2021 IEEE International Conference on Image Processing (ICIP), Anchorage, AK, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 3323–3327. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Yang, B.; Luo, W.; Urtasun, R. PIXOR: Real-time 3D Object Detection from Point Clouds. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7652–7660. [Google Scholar] [CrossRef]
- Ku, J.; Mozifian, M.; Lee, J.; Harakeh, A.; Waslander, S.L. Joint 3d proposal generation and object detection from view aggregation. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Li, B. 3D fully convolutional network for vehicle detection in point cloud. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 1513–1518. [Google Scholar] [CrossRef]
- Li, X.; Guivant, J.; Kwok, N.; Xu, Y.; Li, R.; Wu, H. Three-dimensional backbone network for 3D object detection in traffic scenes. arXiv 2019, arXiv:1901.08373. [Google Scholar]
- Yang, B.; Liang, M.; Urtasun, R. HDNET: Exploiting HD Maps for 3D Object Detection. arXiv 2018, arXiv:2012.11704. [Google Scholar]
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. Pointpillars: Fast encoders for object detection from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12697–12705. [Google Scholar]
- Mao, J.; Wang, X.; Li, H. Interpolated convolutional networks for 3d point cloud understanding. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1578–1587. [Google Scholar]
- Yang, Z.; Sun, Y.; Liu, S.; Jia, J. 3DSSD: Point-Based 3D Single Stage Object Detector. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11037–11045. [Google Scholar] [CrossRef]
- Ye, M.; Xu, S.; Cao, T. HVNet: Hybrid voxel network for LiDAR based 3D object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 1631–1640. [Google Scholar]
- Sindagi, V.A.; Zhou, Y.; Tuzel, O. Mvx-net: Multimodal voxelnet for 3d object detection. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 7276–7282. [Google Scholar]
- Vora, S.; Lang, A.H.; Helou, B.; Beijbom, O. Pointpainting: Sequential fusion for 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 4604–4612. [Google Scholar]
- Wang, C.; Ma, C.; Zhu, M.; Yang, X. PointAugmenting: Cross-Modal Augmentation for 3D Object Detection. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 11789–11798. [Google Scholar] [CrossRef]
- Chen, X.; Ma, H.; Wan, J.; Li, B.; Xia, T. Multi-view 3d object detection network for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1907–1915. [Google Scholar]
- Liang, M.; Yang, B.; Wang, S.; Urtasun, R. Deep continuous fusion for multi-sensor 3d object detection. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 641–656. [Google Scholar]
- Liang, M.; Yang, B.; Chen, Y.; Hu, R.; Urtasun, R. Multi-task multi-sensor fusion for 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7345–7353. [Google Scholar]
- Yoo, J.H.; Kim, Y.; Kim, J.; Choi, J.W. 3d-cvf: Generating joint camera and lidar features using cross-view spatial feature fusion for 3d object detection. In Computer Vision—ECCV 2020: Proceedings of the 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXVII 16; Springer: Berlin/Heidelberg, Germany, 2020; pp. 720–736. [Google Scholar]
- Pang, S.; Morris, D.; Radha, H. CLOCs: Camera-LiDAR object candidates fusion for 3D object detection. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Waikoloa, HI, USA, 3–8 January 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 10386–10393. [Google Scholar]
- Selesnick, I.W.; Baraniuk, R.G.; Kingsbury, N.C. The dual-tree complex wavelet transform. IEEE Signal Process. Mag. 2005, 22, 123–151. [Google Scholar] [CrossRef]
- Yu, W.; Zhou, P.; Yan, S.; Wang, X. Inceptionnext: When inception meets convnext. arXiv 2023, arXiv:2303.16900. [Google Scholar]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding box regression loss with dynamic focusing mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Charron, N.; Phillips, S.; Waslander, S.L. De-noising of lidar point clouds corrupted by snowfall. In Proceedings of the 2018 15th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 8–10 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 254–261. [Google Scholar]
- Pitropov, M.; Garcia, D.E.; Rebello, J.; Smart, M.; Wang, C.; Czarnecki, K.; Waslander, S. Canadian adverse driving conditions dataset. Int. J. Robot. Res. 2021, 40, 681–690. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The kitti dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? the kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3354–3361. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | P | R | Map50 | Map50-95 |
|---|---|---|---|---|
| YOLOv5 | 85.3% | 71.3% | 80.4% | 50.9% |
| YOLOv5+InceptionNeXt | 87.3% | 70.9% | 80.7% | 51.5% |
| YOLOv5+WIOU | 88.4% | 71.3% | 81.5% | 52.1% |
| our | 87.6% | 71.9% | 82.0% | 52.2% |
| Model | ||||||
|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | |
| CLOCs | 75.59% | 74.08% | 73.17% | 46.59% | 47.32% | 46.56% |
| CLOCs+Improved YOLOv5 | 84.45% | 78.47% | 77.72% | 65.15% | 59.46% | 58.27% |
| CLOCs+DTCWT+Improved YOLOv5 | 86.44% | 79.16% | 78.17% | 68.19% | 60.54% | 59.00% |
| Our | 86.61% | 79.79% | 78.86% | 70.72% | 63.47% | 62.72% |
| Model | ||||||
|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | |
| AVOD | 81.32% | 71.86% | 66.57% | 68.75% | 63.68% | 52.54% |
| F-PointNet | 81.40% | 70.29% | 62.19% | 68.73% | 64.53% | 57.91% |
| F-ConvNet | 80.56% | 71.68% | 63.07% | 64.86% | 57.55% | 55.25% |
| TANet | 84.67% | 82.33% | 80.99% | 67.53% | 62.12% | 62.71% |
| Our | 86.61% | 79.79% | 78.86% | 70.72% | 63.47% | 62.72% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Xiao, D.; Li, Q.; Gong, R. Snow-CLOCs: Camera-LiDAR Object Candidate Fusion for 3D Object Detection in Snowy Conditions. Sensors 2024, 24, 4158. https://doi.org/10.3390/s24134158
Fan X, Xiao D, Li Q, Gong R. Snow-CLOCs: Camera-LiDAR Object Candidate Fusion for 3D Object Detection in Snowy Conditions. Sensors. 2024; 24(13):4158. https://doi.org/10.3390/s24134158
Chicago/Turabian StyleFan, Xiangsuo, Dachuan Xiao, Qi Li, and Rui Gong. 2024. "Snow-CLOCs: Camera-LiDAR Object Candidate Fusion for 3D Object Detection in Snowy Conditions" Sensors 24, no. 13: 4158. https://doi.org/10.3390/s24134158
APA StyleFan, X., Xiao, D., Li, Q., & Gong, R. (2024). Snow-CLOCs: Camera-LiDAR Object Candidate Fusion for 3D Object Detection in Snowy Conditions. Sensors, 24(13), 4158. https://doi.org/10.3390/s24134158