
Flexible Graphene Film-Based Antenna Sensor for Large Strain Monitoring of Steel Structures



Abstract
:1. Introduction
2. Strain Monitoring Principle and Antenna Design
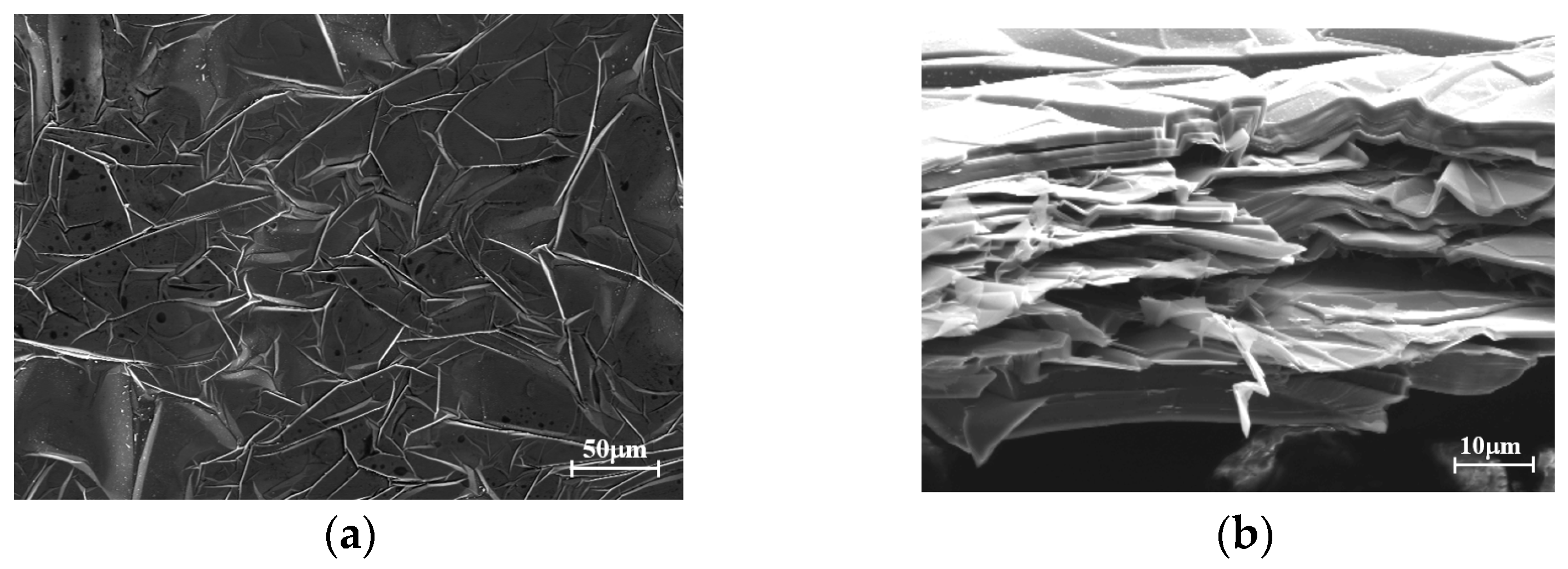
2.1. Conductivity and Large-Scale Properties of Graphene Films
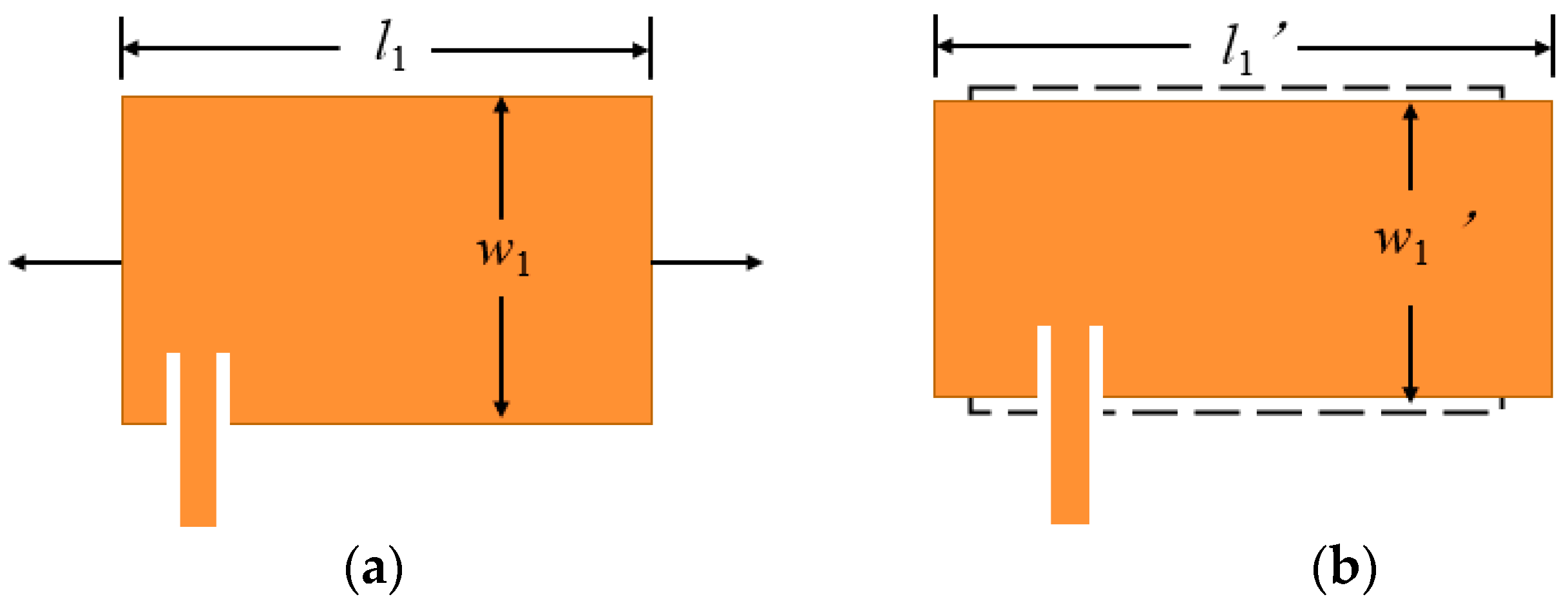
2.2. Principle of Bidirectional Strain Monitoring
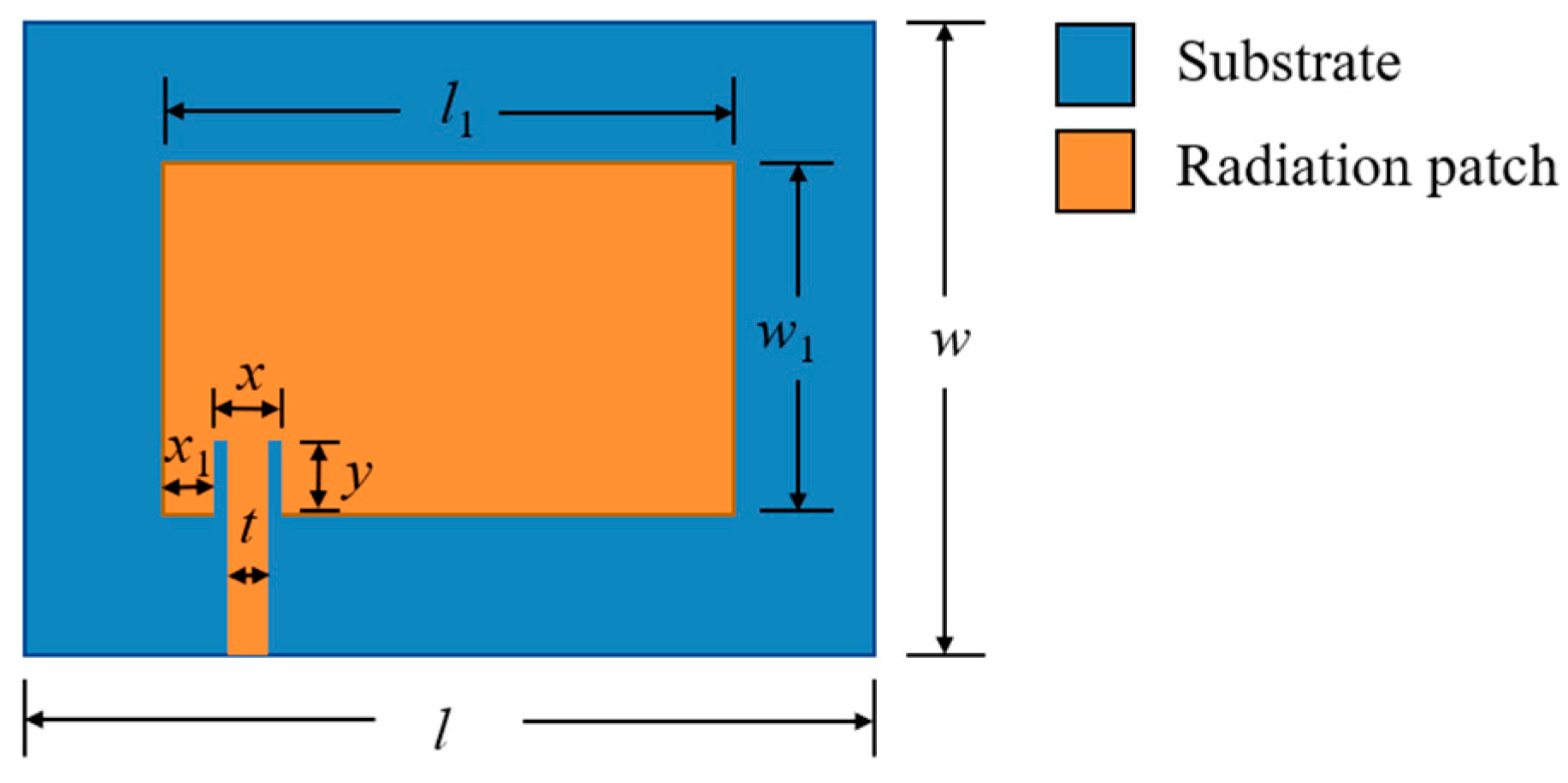
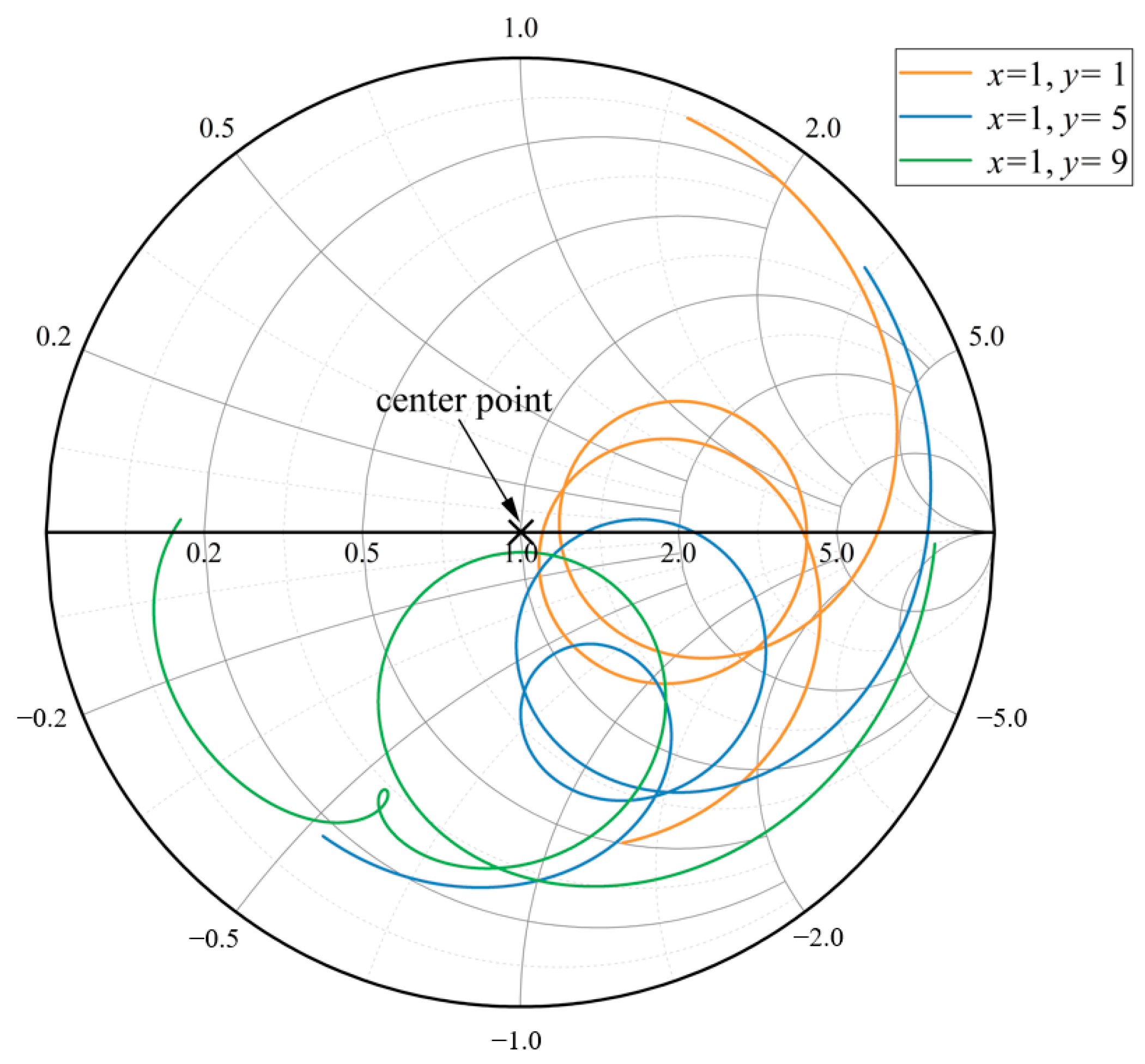
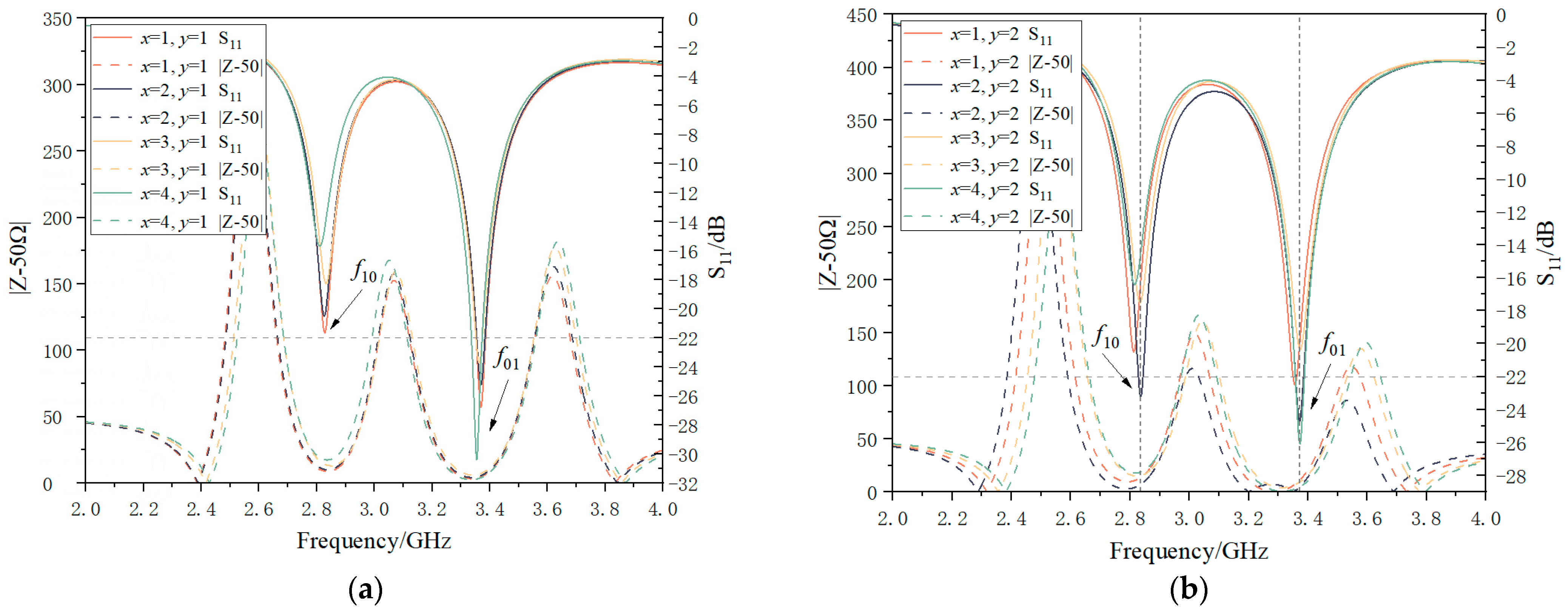
2.3. Antenna Size Optimization Design
3. Simulation of Strain Sensing Performance of the Antenna Sensor
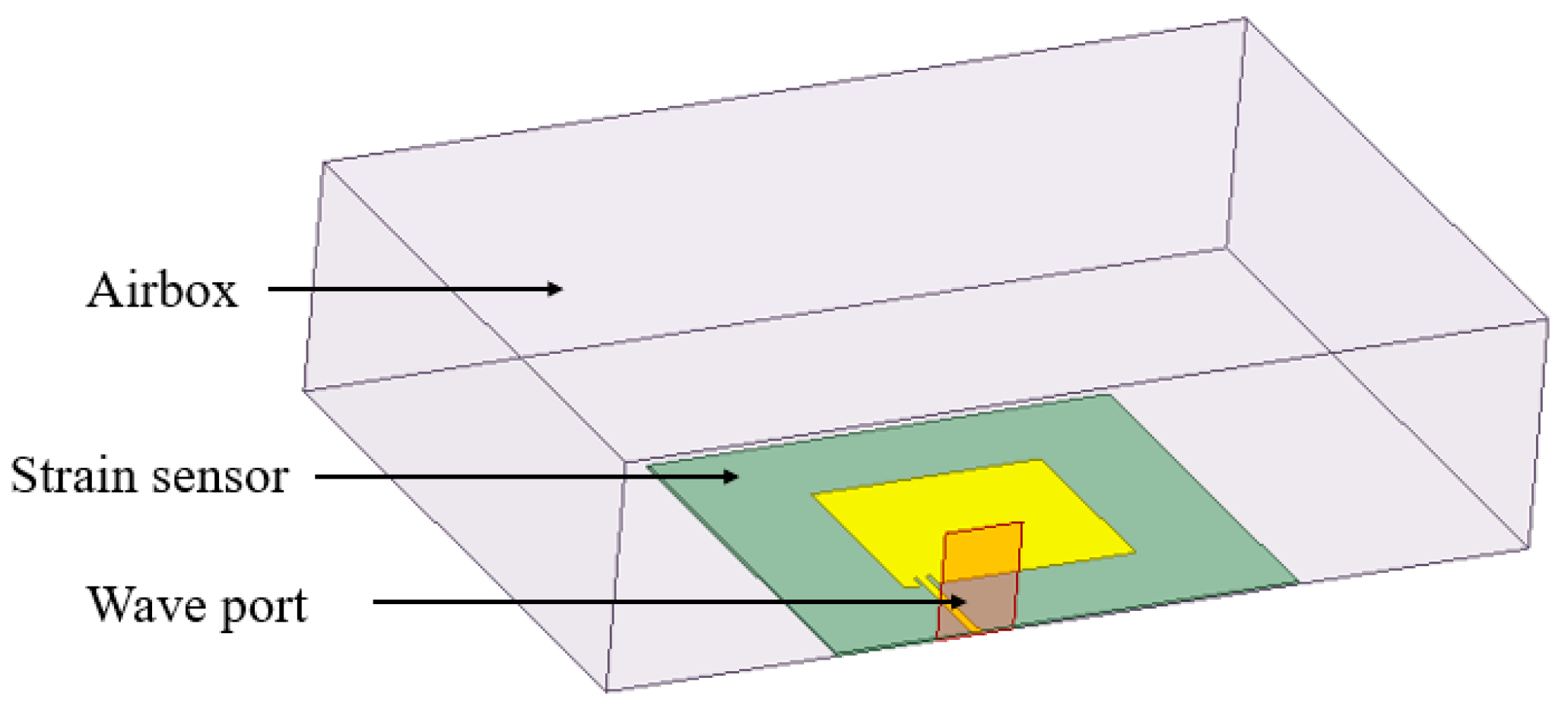
3.1. Modeling of the Antenna
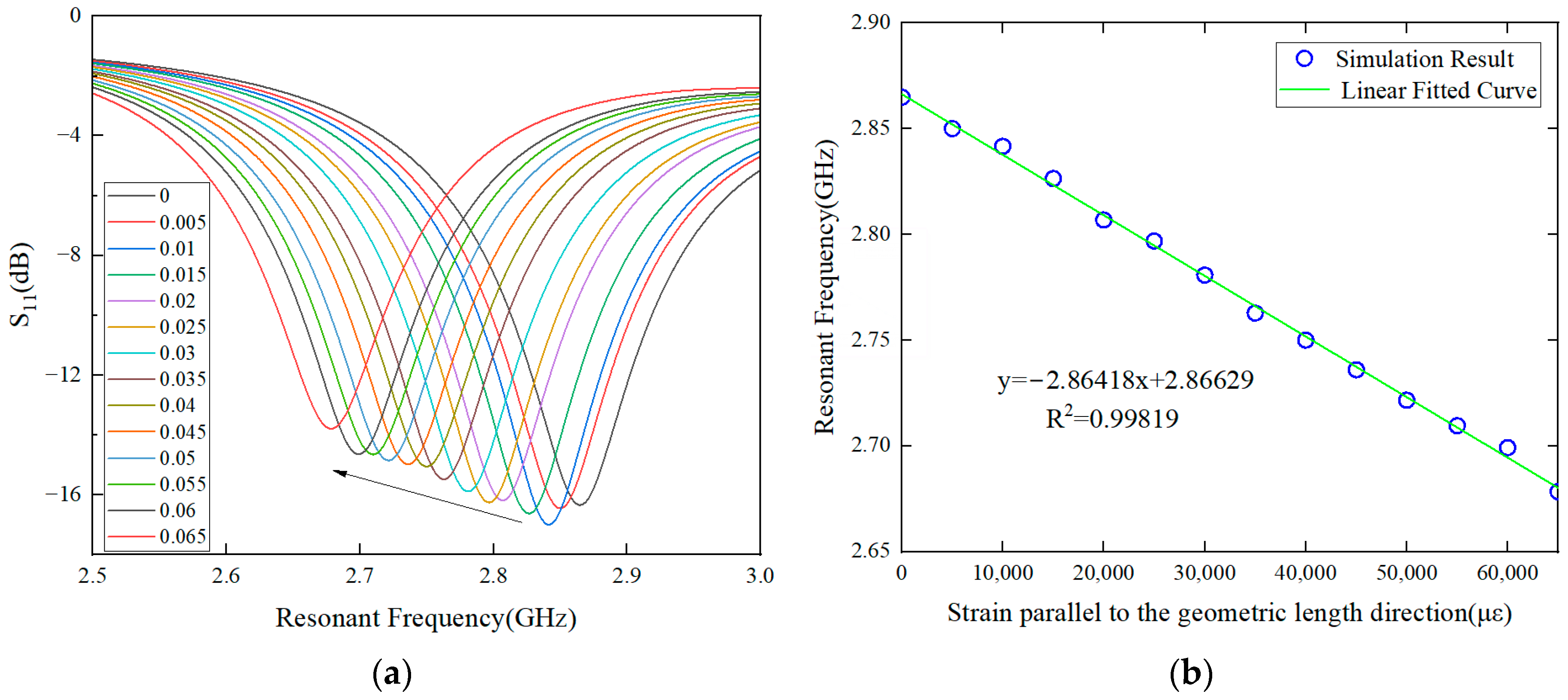
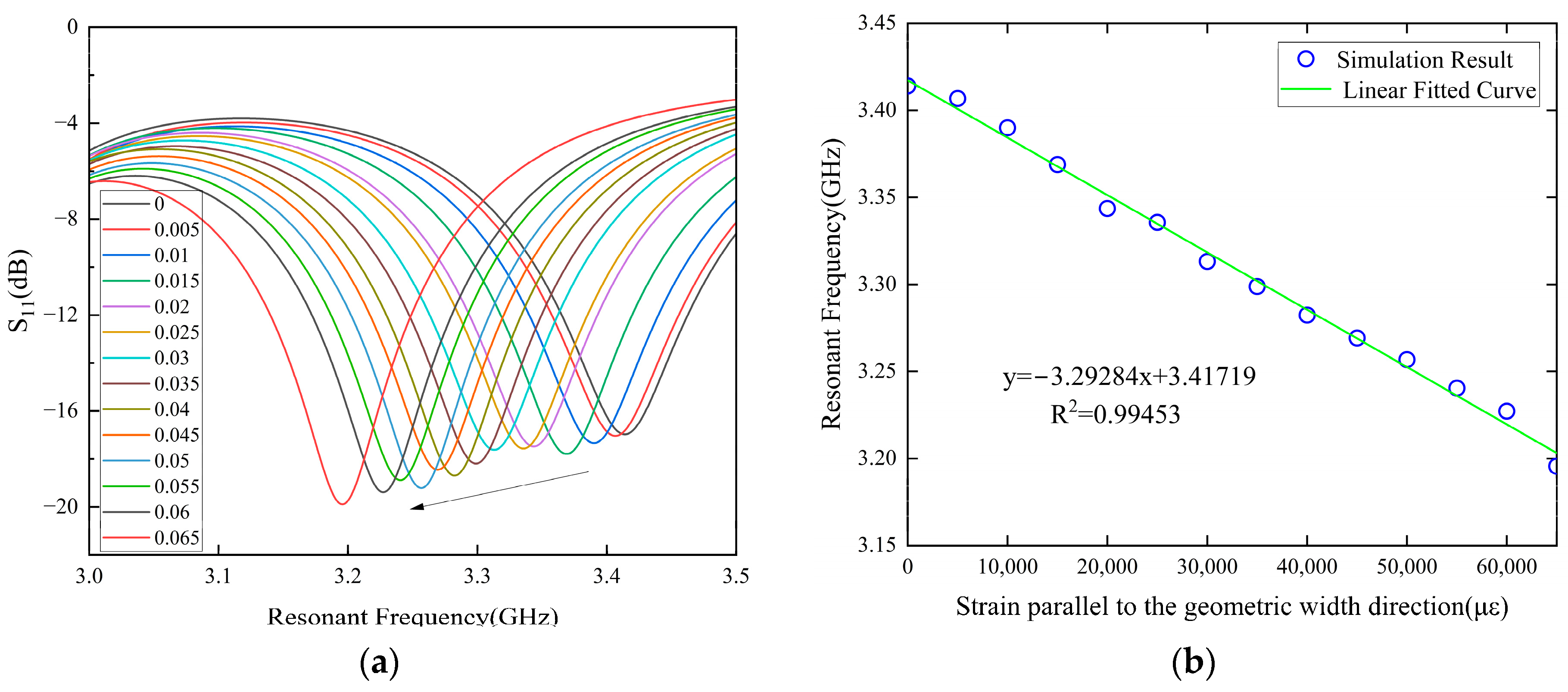
3.2. Simulation Results
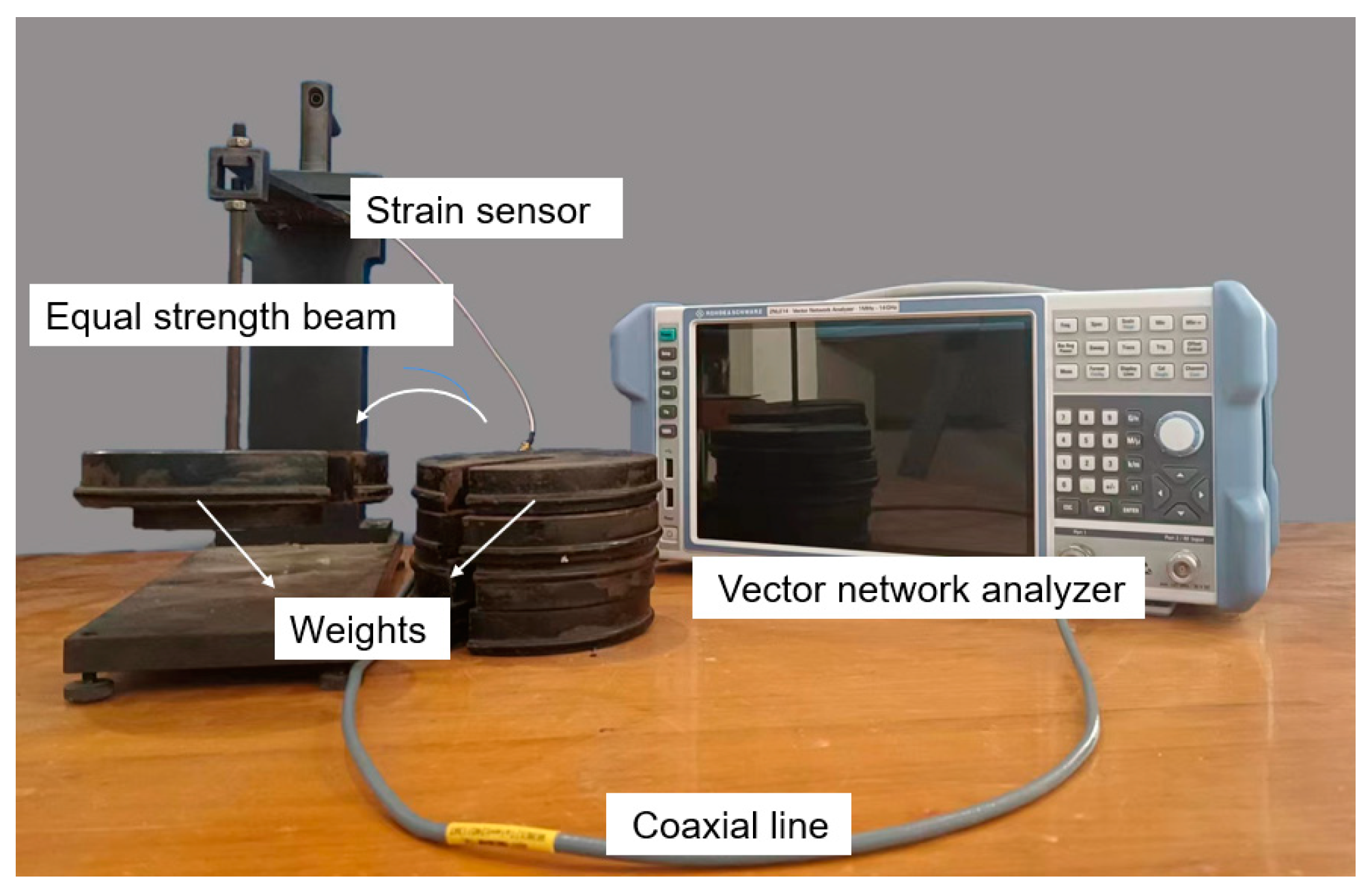
4. Strain Measurement Experiment
4.1. Experimental Process
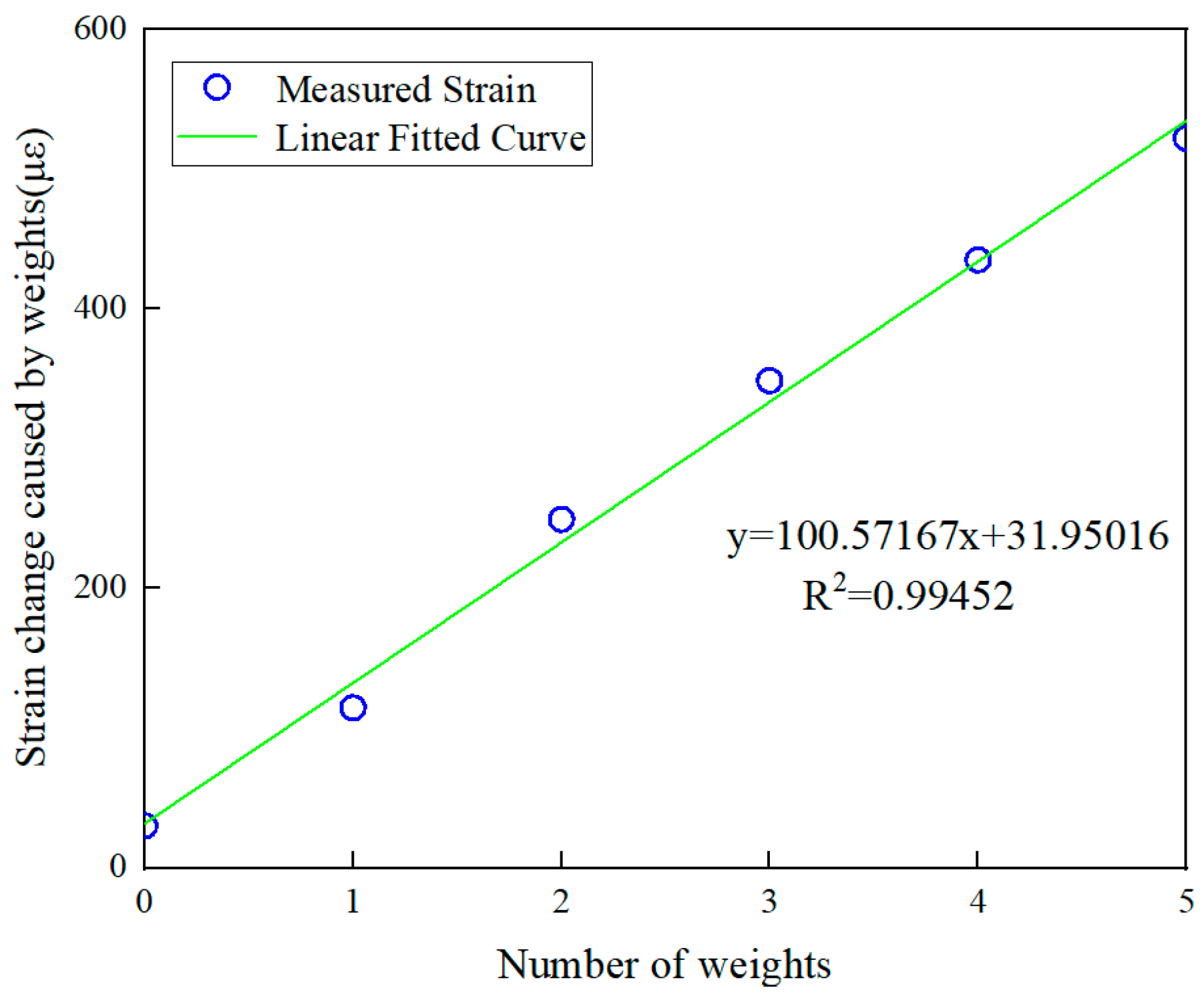
4.2. Experimental Results and Discussion
- (1)
- The microstrip line is not completely fixed to the equal-strength beam [4], and there may be slip between the microstrip line and the surface of the beam below.
- (2)
- The antenna sensor is very sensitive to the surrounding environment [5]. The environmental noise is ignored in the simulation, but the environmental noise in the actual test will affect the experimental results.
- (3)
- The antenna and the microstrip line rely on the conductive gel to conduct electricity, but its existence makes the contact between the antenna and the microstrip line insufficient.
- (4)
- There is strain transmission loss between the beam surface and the antenna patch because the bonding layer and the substrate are polymer materials with viscoelasticity and a hysteresis effect [6]. In this case, the strain of the equal-strength beam cannot completely transfer to the antenna radiation patch, leading to a decline in sensitivity.
- (5)
- During the simulation, vacuum conditions and a Perfect E surface were used, and the size of the antenna met our criteria [7]. However, in actual experiments, due to factors such as processing technology, testing environment, and instruments, there may be differences between the simulation results and those used.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Baek, H.; Yu, S.; Son, S.; Seo, J.; Chung, Y. Automated Region of Interest-Based Data Augmentation for Fallen Person Detection in Off-Road Autonomous Agricultural Vehicles. Sensors 2024, 24, 2371. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, S. Digital Twin Model and Its Establishment Method for Steel Structure Construction Processes. Buildings 2024, 14, 1043. [Google Scholar] [CrossRef]
- Liu, Q.; Zhu, Y.; Yuan, X.; Zhang, J.; Wu, R.; Dou, Q.; Liu, S. Internet of things health detection system in steel structure construction management. IEEE Access 2020, 8, 147162–147172. [Google Scholar] [CrossRef]
- Mbanya Tchafa, F.; Huang, H. Microstrip patch antenna for simultaneous strain and temperature sensing. Smart Mater. Struct. 2018, 27, 105011. [Google Scholar]
- Wang, Q.; Zhang, C.; Ma, Z.; Jiao, G.; Jiang, X.; Ni, Y.; Wang, Y.; Du, Y.; Qu, G.; Huang, J. Towards long-transmission-distance and semi-active wireless strain sensing enabled by dual-interrogation-mode RFID technology. Struct. Control. Health Monit. 2022, 29, e3069. [Google Scholar] [CrossRef]
- Li, X.; Xue, S.; Xie, L.; Wan, G. A miniaturized passive wireless patch antenna sensor for structural crack sensing. Struct. Health Monit. 2024, 1–20. [Google Scholar] [CrossRef]
- Xue, S.; Wang, H.; Xie, L.; Li, X.; Zheng, Z.; Wan, G. Bolt loosening detection method based on double-layer slotted circular patch antenna. Struct. Health Monit. 2024, 1–16. [Google Scholar] [CrossRef]
- Peng, J.; Li, X. A Numerical simulation of the seismic performance and residual stress of welded joints in building steel structures based on the finite element method. Processes 2024, 12, 263. [Google Scholar] [CrossRef]
- Glisic, B. Concise Historic Overview of Strain Sensors Used in the Monitoring of Civil Structures: The First One Hundred Years. Sensors 2022, 22, 2397. [Google Scholar] [CrossRef] [PubMed]
- Rahman, H.A.; Rizal, M.; Ghani, J.A.; Mazlan, M.A.S.; Nuawi, M.A.; Haron, C.H.C.; Suliman, M.N.A.; Zelun, A.H.M. Semiconductor strain gauges as potential replacement to metal foil for cutting force measurement in machining process. J. Tribol. 2022, 33, 137–147. [Google Scholar]
- Torfs, T.; Sterken, T.; Brebels, S.; Santana, J.; van den Hoven, R.; Spiering, V.; Bertsch, N.; Trapani, D.; Zonta, D. Low Power Wireless Sensor Network for Building Monitoring. IEEE Sens. J. 2013, 13, 909–915. [Google Scholar] [CrossRef]
- Measures, R.M. Structural Monitoring with Fiber Optic Technology; Academic Press: San Diego, CA, USA, 2001. [Google Scholar]
- Glisic, B.; Inaudi, D. Fibre Optic Methods for Structural Health Monitoring; John Wiley & Sons, Inc.: Chichester, UK, 2007. [Google Scholar]
- Pyo, S.; Loh, K.J.; Hou, T.C.; Jarva, E.; Lynch, J.P. A wireless impedance analyzer for automated tomographic mapping of a nanoengineered sensing skin. Smart Struct. Syst. 2011, 8, 139–155. [Google Scholar] [CrossRef]
- Hallaji, M.; Pour-Ghaz, M. A new sensing skin for qualitative damage detection in concrete elements: Rapid difference imaging with electrical resistance tomography. NDT E Int. 2014, 68, 13–21. [Google Scholar] [CrossRef]
- Tian, L.; Pan, B.; Cai, Y.; Lian, H.; Zhao, Y. Application of digital image correlation for long-distance bridge deflection measurement. Proc. SPIE 2013, 8769, 87692V. [Google Scholar]
- Varadan, V.V.; Varadan, V.K.; Bao, X.; Ramanathan, S.; Piscotty, D. Wireless passive IDT strain microsensor. Smart Mater. Struct. 1997, 6, 745–751. [Google Scholar] [CrossRef]
- Straser, E.G.; Kiremidjian, A.S.; Meng, T.H.; Redlefsen, L. Modular, wireless network platform for monitoring structures. In Proceedings of the International Modal Analysis Conference—IMAC, Santa Barbara, CA, USA, 2–5 February 1998; Volume 1, pp. 450–456. [Google Scholar]
- Óscar, B.; Manuel, C.; Borja, C.; Yago, C.; Belén, R. Structural health control of historical steel structures using HBIM. Autom. Constr. 2022, 140, 065019. [Google Scholar]
- Yu, J.; Satoshi, Y. Cumulative deformation capacity of structural steel subjected to extremely large amplitude strain histories. J. Build. Eng. 2021, 41, 102649. [Google Scholar]
- Wan, C.; Xie, L.; Xu, K.; Xue, S.; Jiang, C.; Wan, G.; Ding, T. Transverse deformation effect on sensitivity of strain-sensing patch antenna. Int. J. Distrib. Sens. Netw. 2020, 16, 3. [Google Scholar] [CrossRef]
- Gao, K.; Zhang, Z.; Weng, S.; Zhu, H.; Yu, H.; Peng, T. Review of Flexible Piezoresistive Strain Sensors in Civil Structural Health Monitoring. Appl. Sci. 2022, 12, 9750. [Google Scholar] [CrossRef]
- Xue, S.; Zheng, Z.; Guan, S.; Xie, L.; Wan, G.; Wan, C. A Capacitively-Fed Inverted-F Antenna for Displacement Detection in Structural Health Monitoring. Sensors 2020, 20, 5310. [Google Scholar] [CrossRef]
- Wan, G.; Kang, W.; Wang, C.; Li, W.; Li, M.; Xie, L.; Chen, L. Separating strain sensor based on dual-resonant circular patch antenna with chipless RFID tag. Smart Mater. Struct. 2020, 30, 015007. [Google Scholar] [CrossRef]
- Awasthi, A.; Li, J.; Koh, L.; Ogunseitan, O. Circular economy and electronic waste. Nat. Electron. 2019, 2, 86–89. [Google Scholar] [CrossRef]
- Weng, S.; Peng, T.; Gao, K.; Zhu, H.; Yan, Y.; Yu, H.; He, D. Bidirectional Large Strain Monitoring Using a Novel Graphene Film-Based Patch Antenna Sensor. Smart Mater. Struct. 2024, 33, 075015. [Google Scholar] [CrossRef]
- Hu, X.; Dou, Y.; Li, J.; Liu, Z. Buckled structures: Fabrication and applications in wearavle electronics. Wearable Electron. 2019, 15, 184805. [Google Scholar] [CrossRef]
- Hui, Y.; Zu, H.; Song, R.; Fu, H.; Luo, K.; Tian, C.; Wu, B.; Huang, G.; Kou, Z.; Cheng, X.; et al. Graphene-Assembled Film-Based Reconfigurable Filtering Antenna with Enhanced Corrosion-Resistance. Crystals 2023, 13, 747. [Google Scholar] [CrossRef]
- Peng, L.; Xu, Z.; Liu, Z.; Guo, Y.; Li, P.; Gao, C. Ultrahigh thermal conductive yet superflexible graphene films. Adv. Mater. 2017, 29, 1700589. [Google Scholar] [CrossRef]
- Song, R.; Huang, G.; Liu, C.; Zhang, N.; Zhang, J.; Liu, C.; Wu, Z.; He, D. High-conductive graphene film based antenna array for 5G mobile communications. Int. J. RF Microw. Comput.-Aided Eng. 2019, 29, 21692. [Google Scholar] [CrossRef]
- Wang, Z.; Li, P.; Song, R.; Qian, W.; Zhou, H.; Wang, Q.; Wang, Y.; Zeng, X.; Ren, L.; Yan, S.; et al. High conductive graphene assembled films with porous micro-structure for freestanding and ultra-low power strain sensors. Sci. Bull. 2020, 65, 1363–1370. [Google Scholar] [CrossRef]
- Jiang, S.; Song, R.; Hu, Z.; Xin, Y.; Huang, G.; He, D. Millimeter wave phased array antenna based on highly conductive graphene-assembled film for 5G applications. Carbon 2022, 196, 493–498. [Google Scholar] [CrossRef]
- Balanis, C. Antenna Theory Analysis and Design, 3rd ed.; Wiley Interscience: New York, NY, USA, 2005. [Google Scholar]
- Song, L.; Myers, A.; Adams, J.; Zhu, Y. Stretchable and reversibly deformable radio frequency antennas based on silver nanowires. ACS Appl. Mater. Interfaces 2014, 6, 4248–4253. [Google Scholar] [CrossRef]
- Zhang, J.; Song, R.; Zhao, X.; Fang, R.; Zhang, B.; Qian, W.; Zhang, J.; Liu, C.; He, D. Flexible graphene-assembled film-based antenna for wireless wearable sensor with miniaturized size and high sensitivity. ACS Omega 2020, 5, 12937–12943. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Kang, L.; Liu, L.; Hu, J.; Wan, G.; Xie, L. An encoded reconfigurable RFID strain sensor and its information fusion method. Smart Mater. Struct. 2022, 31, 105011. [Google Scholar] [CrossRef]
- Xue, S.; Jiang, K.; Guan, S.; Xie, L.; Wan, G.; Wan, C. Long-Range Displacement Meters Based on Chipped Circular Patch Antenna. Sensors 2020, 20, 4884. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| y = 1 | y = 2 | y = 3 | |
|---|---|---|---|
| x1 = 1 | 1.10, 1.18 | 1.21, 1.21 | 1.24, -- a |
| x1 = 2 | 1.12, 1.21 | 1.16, 1.16 | 1.21, -- |
| x1 = 3 | 1.14, 1.28 | 1.24, 1.31 | 1.32, -- |
| x1 = 4 | 1.14, 1.28 | 1.25, 1.31 | 1.31, -- |
| x1 = 5 | 1.16, 1.73 | 1.27, 1.62 | 1.58, 1.69 |
| x1 = 6 | 1.17, 1.99 | 1.24, 1.91 | 1.91, -- |
| x1 = 7 | 1.12, 2.51 | 1.17, 2.38 | 1.67, 2.38 |
| Parameter | Value (mm) | Parameter | Value (mm) |
|---|---|---|---|
| w1 | 25.00 | l1 | 30.00 |
| w | 50.00 | l | 60.00 |
| x | 2.25 | y | 2.00 |
| x1 | 2.00 | t | 1.25 |
| Small Strain (0–600 µε) | Large Strain (0–65,000 µε) | Difference | |
|---|---|---|---|
| Along width direction | 3.194 kHz/με | 3.293 kHz/με | 3.01% |
| Along length direction | 2.861 kHz/με | 2.864 kHz/με | 0.10% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weng, S.; Zhang, J.; Gao, K.; Zhu, H.; Peng, T. Flexible Graphene Film-Based Antenna Sensor for Large Strain Monitoring of Steel Structures. Sensors 2024, 24, 4388. https://doi.org/10.3390/s24134388
Weng S, Zhang J, Gao K, Zhu H, Peng T. Flexible Graphene Film-Based Antenna Sensor for Large Strain Monitoring of Steel Structures. Sensors. 2024; 24(13):4388. https://doi.org/10.3390/s24134388
Chicago/Turabian StyleWeng, Shun, Jingqi Zhang, Ke Gao, Hongping Zhu, and Tingjun Peng. 2024. "Flexible Graphene Film-Based Antenna Sensor for Large Strain Monitoring of Steel Structures" Sensors 24, no. 13: 4388. https://doi.org/10.3390/s24134388