
Two-Field Excitation for Contactless Inductive Flow Tomography
 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. CIFT—Concept and Mathematical Basis
3. Experimental Set-Up
3.1. General
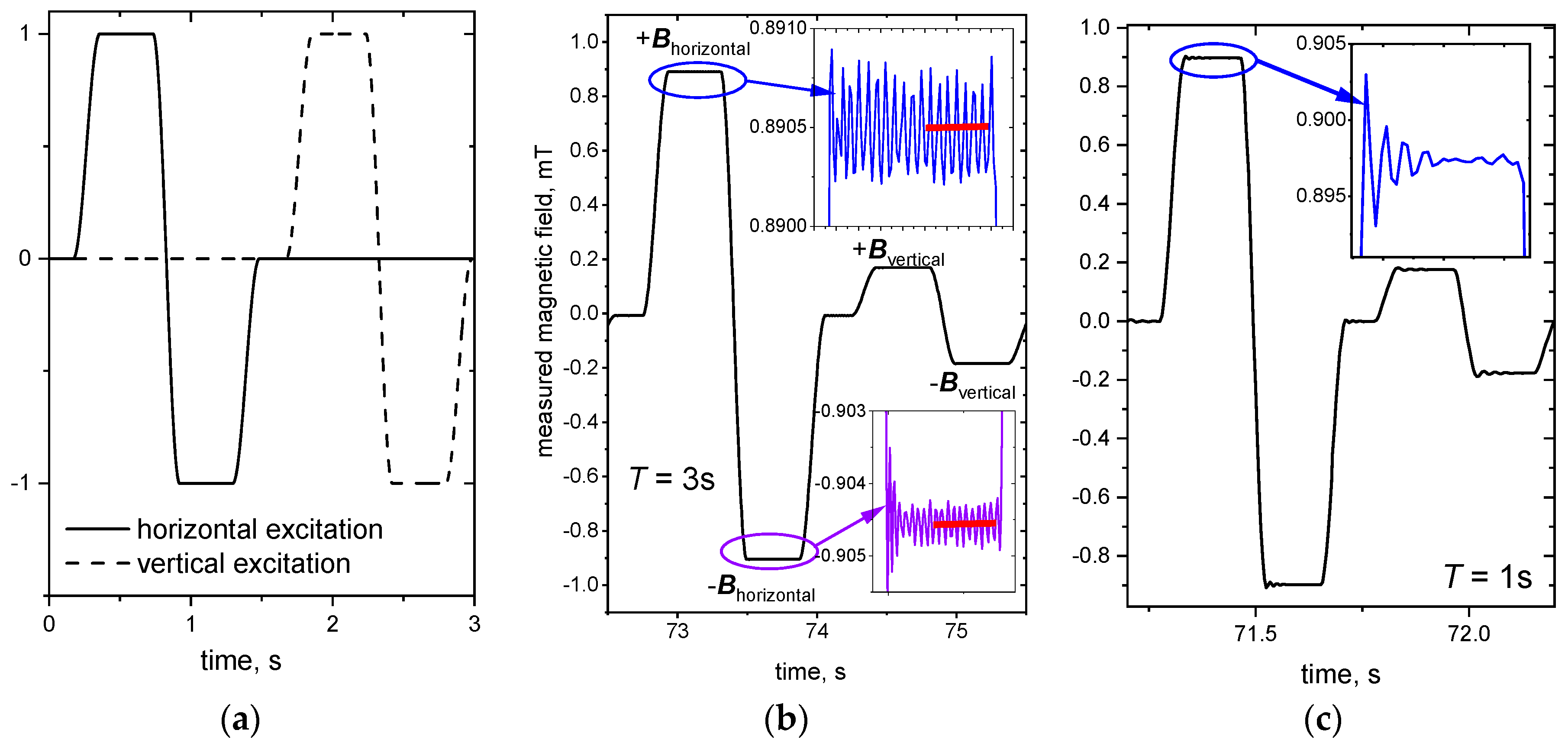
3.2. Excitation Magnetic Fields
4. Consecutive Excitation
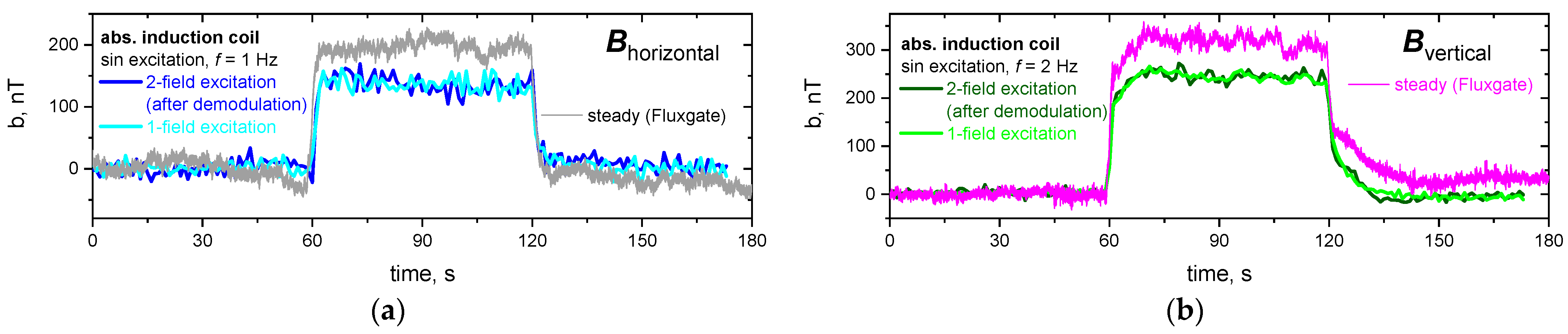
5. Concurrent Excitation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baumgartl, J.; Hubert, A.; Müller, G. The use of magnetohydrodynamic effects to investigate fluid flow in electrically conducting melts. Phys. Fluids A 1993, 5, 3280–3289. [Google Scholar] [CrossRef]
- Kasuga, M.; Fukai, I.; Amano, M.; Kumoyama, K. Remote sensing of Induced Electric Current in Melt for Magnetic Czochralski Crystal Growth. Jpn. J. Appl. Phys. 1993, 32, 1103–1105. [Google Scholar] [CrossRef]
- Berkov, D.V.; Gorn, N.L. Reconstruction of the velocity distribution in conducting melts from induced magnetic field measurements. Comput. Phys. Commun. 1995, 86, 255–263. [Google Scholar] [CrossRef]
- Stefani, F.; Gerbeth, G. On the uniqueness of velocity reconstruction in conducting fluids from measurements of induced electromagnetic fields. Inverse Probl. 2000, 16, 1–9. [Google Scholar] [CrossRef]
- Stefani, F.; Gerbeth, G. A contactless method for velocity reconstruction in electrically conducting fluids. Meas. Sci. Technol. 2000, 11, 758–765. [Google Scholar] [CrossRef]
- Stefani, F.; Gundrum, T.; Gerbeth, G. Contactless inductive flow tomography. Phys. Rev. E 2004, 70, 056306. [Google Scholar] [CrossRef]
- Wondrak, T.; Sieger, M.; Mitra, R.; Schindler, F.; Stefani, F.; Vogt, T.; Eckert, S. Three-dimensional flow structures in turbulent Rayleigh-Bénard convection at low Prandtl number Pr = 0.03. J. Fluid Mech. 2023, 974, A48. [Google Scholar] [CrossRef]
- Glaviníc, I.; Galindo, V.; Stefani, F.; Eckert, S.; Wondrak, T. Contactless Inductive Flow Tomography for Real-Time Control of Electromagnetic Actuators in Metal Casting. Sensors 2022, 22, 4155. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, R.T.; Wondrak, T.; Stefani, F. Singularity consideration in the integral equations for contactless inductive flow tomography. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 1366–1375. [Google Scholar] [CrossRef]
- Wondrak, T.; Galindo, V.; Gerbeth, G.; Gundrum, T.; Stefani, F.; Timmel, K. Contactless inductive flow tomography for a model of continuous steel casting. Meas. Sci. Technol. 2010, 21, 045402. [Google Scholar] [CrossRef]
- Ren, L.; Tao, X.; Zhang, L.; Ni, M.-J.; Xia, K.-Q.; Xie, Y.-C. Flow states and heat transport in liquid metal convection. J. Fluid Mech. 2022, 951, R1. [Google Scholar] [CrossRef]
- Grannan, A.M.; Cheng, J.S.; Aggarwal, A.; Hawkins, E.K.; Xu, Y.; Horn, S.; Sánchez-Álvarez, S.; Aurnou, J.M. Experimental pub crawl from Rayleigh–Bénard to magnetostrophic convection. J. Fluid Mech. 2022, 939, R1. [Google Scholar] [CrossRef]
- Vogt, T.; Horn, S.; Grannan, A.M.; Aurnou, J.M. Jump rope vortex in liquid metal convection. Proc. Natl. Acad. Sci. USA 2018, 115, 12674–12679. [Google Scholar] [CrossRef]
- Peyton, A.J.; Yu, Z.Z.; Lyon, G.; Al-Zeibak, S.; Ferreira, J.; Velez, J.; Linhares, F.; Borges, A.R.; Xiong, H.L.; Saunders, N.H.; et al. An overview of electromagnetic inductance tomography: Description of three different systems. Meas. Sci. Technol. 1996, 7, 261. [Google Scholar] [CrossRef]
- Griffiths, H. Magnetic induction tomography. Meas. Sci. Technol. 2001, 12, 1126–1131. [Google Scholar] [CrossRef]
- Ma, L.; Soleimani, M. Magnetic induction tomography methods and applications: A review. Meas. Sci. Tech. 2017, 28, 072001. [Google Scholar] [CrossRef]
- Zolgharni, M.; Ledger, P.D.; Griffiths, H. Forward modelling of magnetic induction tomography: A sensitivity study for detecting haemorrhagic cerebral stroke. Med. Biol. Eng. Comput. 2009, 47, 1301–1313. [Google Scholar] [CrossRef]
- Higson, S.R.; Drake, P.; Lyons, A.; Peyton, A.J.; Lionheart, B. Electromagnetic visualisation of steel flow in continuous casting nozzles. Ironmak. Steelmak. 2006, 33, 357–361. [Google Scholar] [CrossRef]
- Scharfetter, H.; Lackner, H.; Rosell, J. Magnetic induction tomography: Hardware for multi-frequency measurements in biological tissues. Physiol. Meas. 2001, 22, 131. [Google Scholar] [CrossRef]
- Ma, X.; Peyton, A.J.; Higson, S.R.; Drake, P. Development of multiple frequency electromagnetic induction systems for steel flow visualization. Meas. Sci. Technol. 2008, 19, 094008. [Google Scholar] [CrossRef]
- Dingley, G.; Soleimani, M. Multi-Frequency Magnetic Induction Tomography System and Algorithm for Imaging Metallic Objects. Sensors 2021, 21, 3671. [Google Scholar] [CrossRef] [PubMed]
- Darrer, B.J.; Watson, J.C.; Bartlett, P.A.; Renzoni, F. Electromagnetic imaging through thick metallic enclosures. AIP Adv. 2015, 5, 087143. [Google Scholar] [CrossRef]
- Muttakin, I.; Soleimani, M. Magnetic Induction Tomography Spectroscopy for Structural and Functional Characterization in Metallic Materials. Materials 2020, 13, 2639. [Google Scholar] [CrossRef] [PubMed]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Glavinic, I.; Stefani, F.; Eckert, S.; Wondrak, T. Real time flow control during continuous casting with contactless inductive flow tomography. Magnetohydrodynamics 2022, 1–2, 157–165. [Google Scholar] [CrossRef]
- Hämäläinen, M.; Hari, R.; Ilmoniemi, R.J.; Knuutila, J.; Lounasmaa, O.V. Magnetoencephalography—Theory, instrumentation, and applications to noninvasive studies of the working human brain. Rev. Mod. Phys. 1993, 65, 413–497. [Google Scholar] [CrossRef]
- Piastra, M.C.; Nüßing, A.; Vorwerk, J.; Clerc, M.; Engwer, C.; Wolters, C.H. A comprehensive study on electroencephalography and magnetoencephalography sensitivity to cortical and subcortical sources. Hum. Brain Mapp. 2021, 42, 978–992. [Google Scholar] [CrossRef] [PubMed]
- van Oosterom, A.; Huiskamp, G.J. A realistic torso model for magnetocardiography. Int. J. Cardiac. Imag. 1991, 7, 169–176. [Google Scholar] [CrossRef]
- Brala, D.; Thevathasan, T.; Grahl, S.; Barrow, S.; Violano, M.; Bergs, H.; Golpour, A.; Suwalski, P.; Poller, W.; Skurk, C.; et al. Application of Magnetocardiography to Screen for Inflammatory Cardiomyopathy and Monitor Treatment Response. J. Am. Heart Assoc. 2023, 12, e027619. [Google Scholar] [CrossRef]
- Plevachuk, Y.; Sklyarchuk, V.; Eckert, S.; Gerbeth, G.; Novakovic, R. Thermophysical Properties of the Liquid Ga–In–Sn Eutectic Alloy. J. Chem. Eng. Data 2014, 59, 757–763. [Google Scholar] [CrossRef]
- Ratajczak, M.; Wondrak, T.; Stefani, F. A gradiometric version of contactless inductive flow tomography: Theory and first applications. Philos. Trans. R. Soc. A 2016, 374, 20150330. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sieger, M.; Gudat, K.; Mitra, R.; Sonntag, S.; Stefani, F.; Eckert, S.; Wondrak, T. Two-Field Excitation for Contactless Inductive Flow Tomography. Sensors 2024, 24, 4458. https://doi.org/10.3390/s24144458
Sieger M, Gudat K, Mitra R, Sonntag S, Stefani F, Eckert S, Wondrak T. Two-Field Excitation for Contactless Inductive Flow Tomography. Sensors. 2024; 24(14):4458. https://doi.org/10.3390/s24144458
Chicago/Turabian StyleSieger, Max, Katharina Gudat, Rahul Mitra, Stefanie Sonntag, Frank Stefani, Sven Eckert, and Thomas Wondrak. 2024. "Two-Field Excitation for Contactless Inductive Flow Tomography" Sensors 24, no. 14: 4458. https://doi.org/10.3390/s24144458