

A Deep-Learning-Based Algorithm for Landslide Detection over Wide Areas Using InSAR Images Considering Topographic Features

Abstract
:1. Introduction
2. Methods
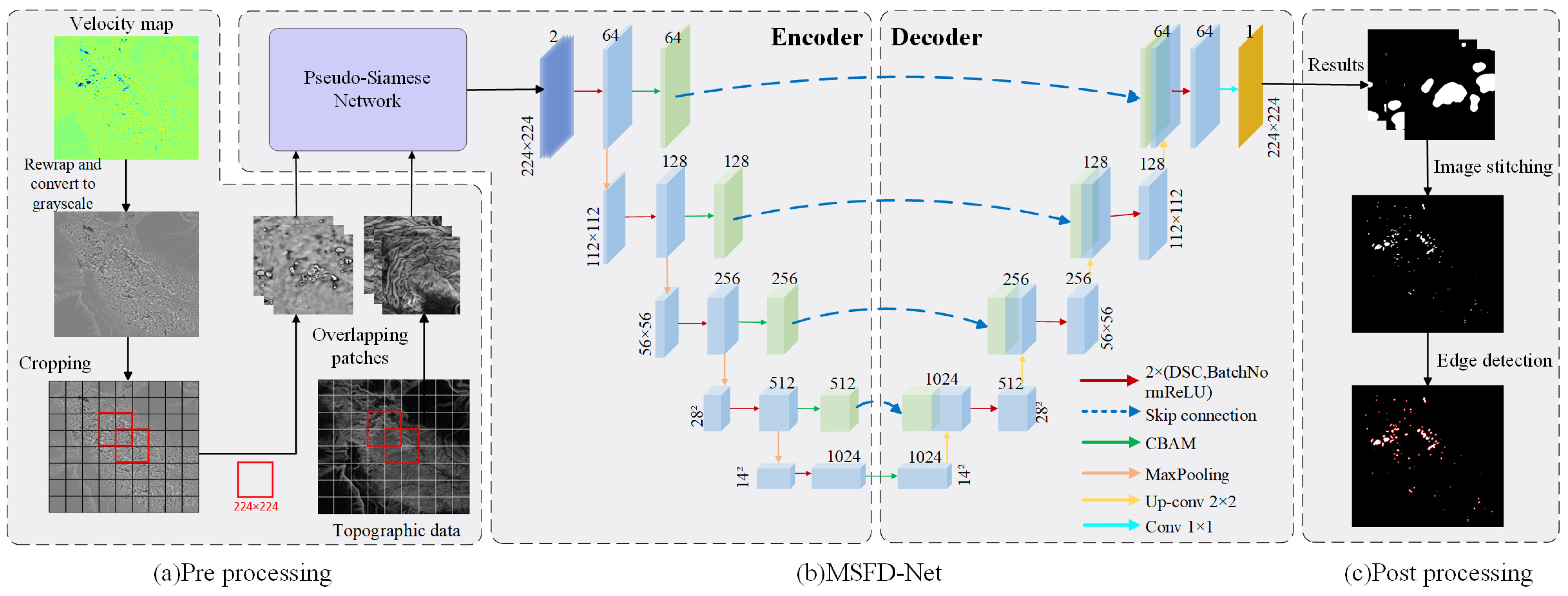
2.1. A Multi-Source Data Fusion Network Based on DeforNet
2.2. Network Training
2.3. Reference Models and Accuracy Evaluation
3. Experiment and Data processing
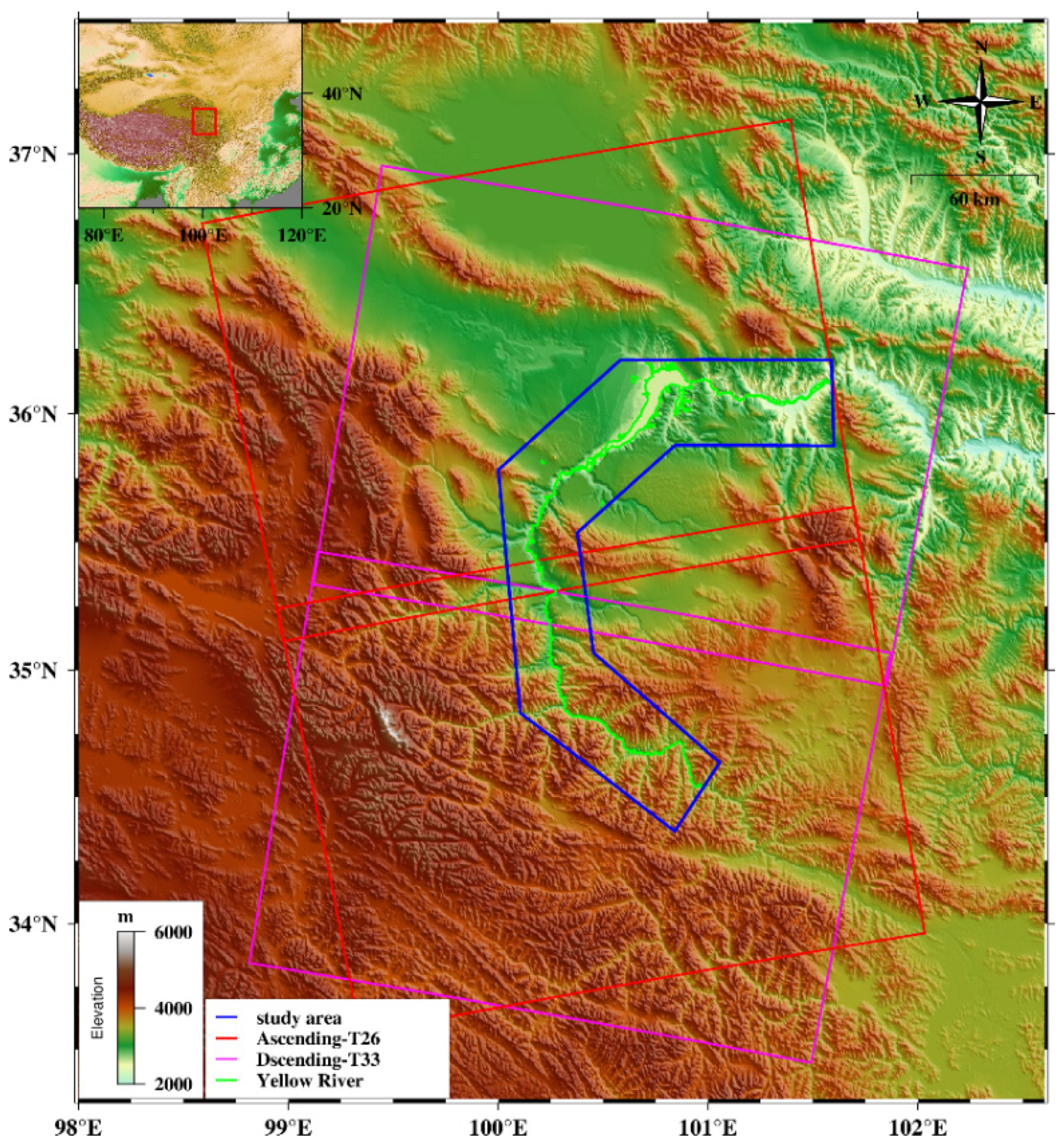
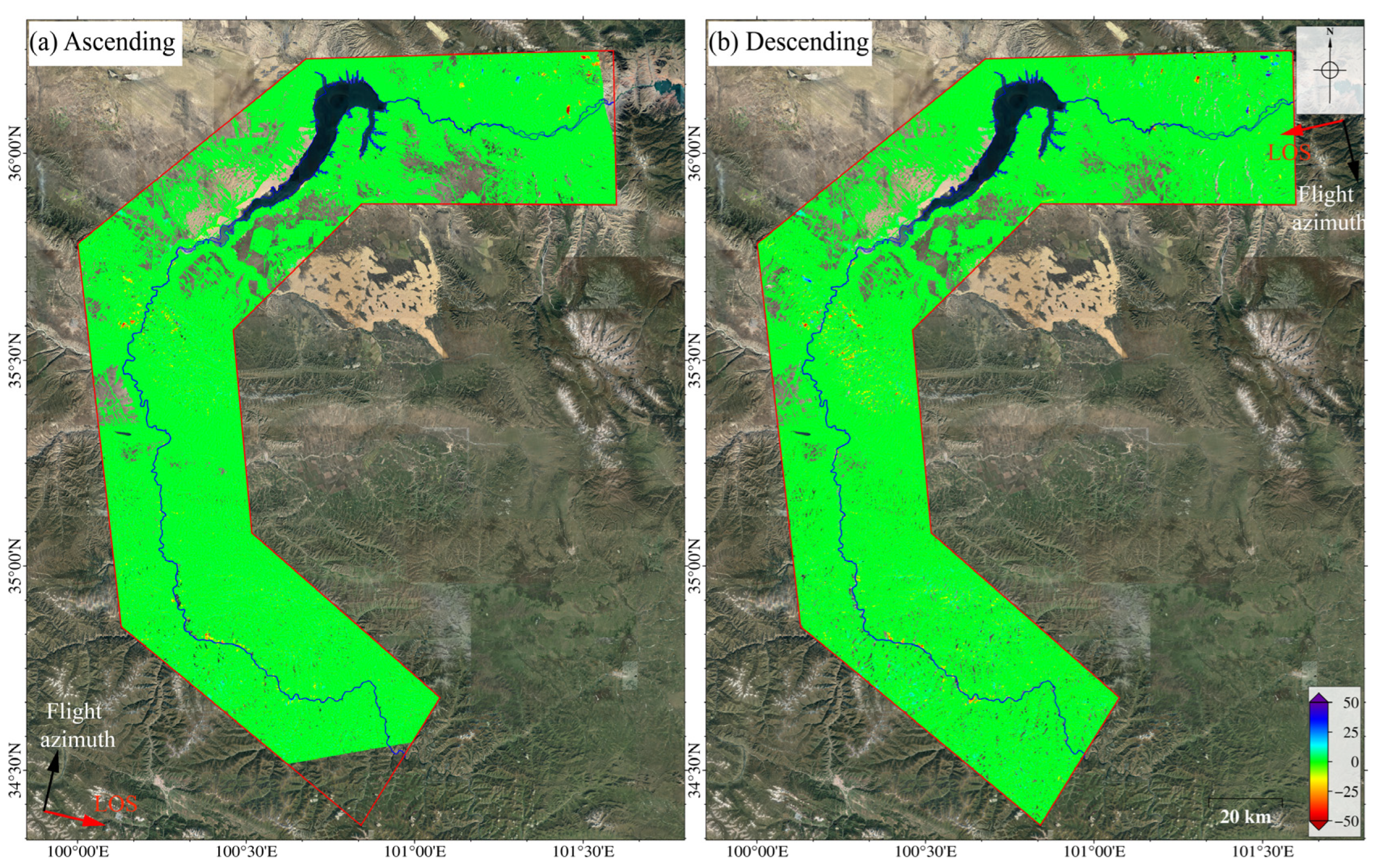
3.1. Study Area and Datasets
3.2. Data Processing
4. Result and Analysis
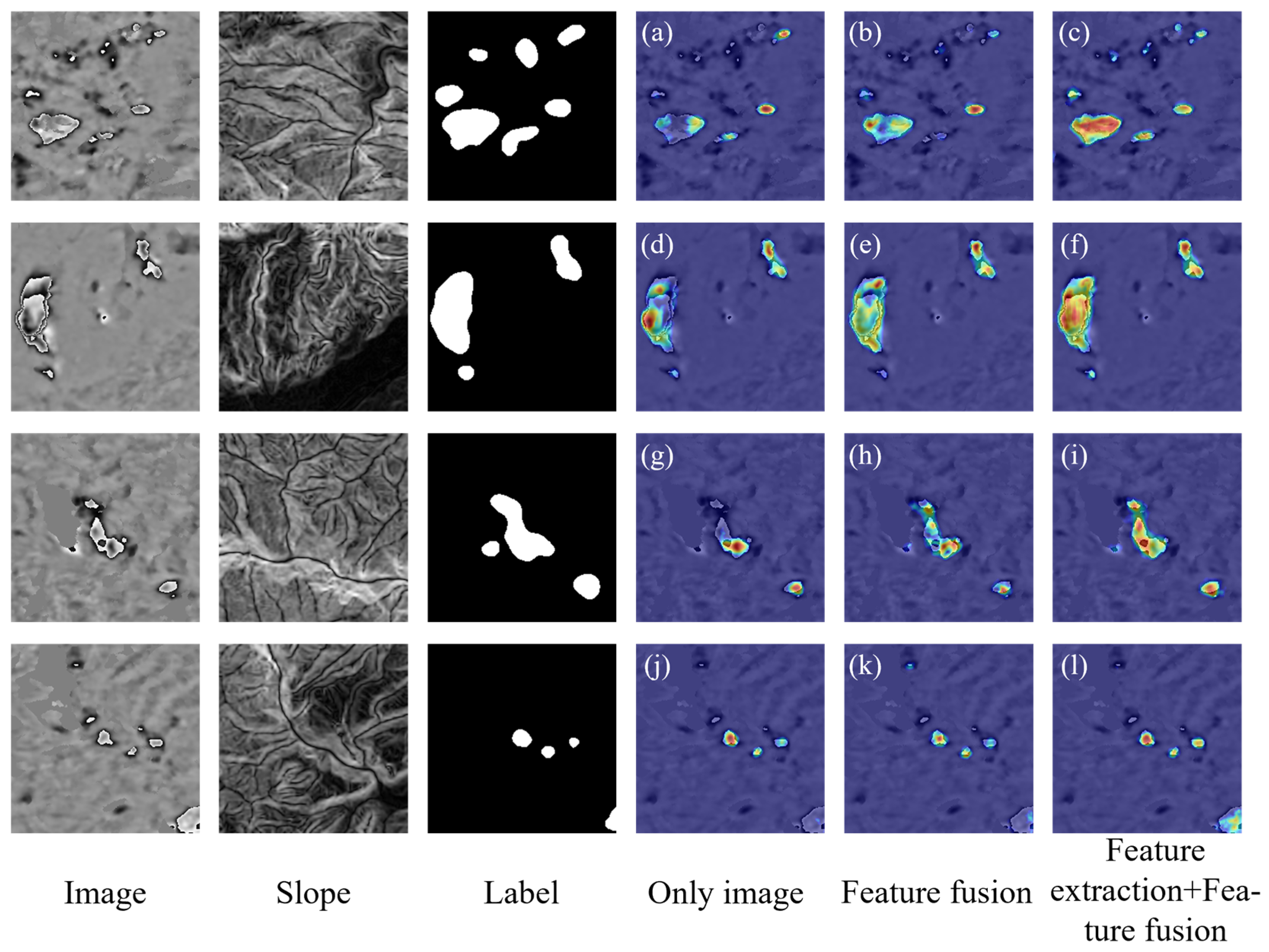
4.1. Ablation Experiment
4.2. Comparison of the Proposed Method with Other Networks
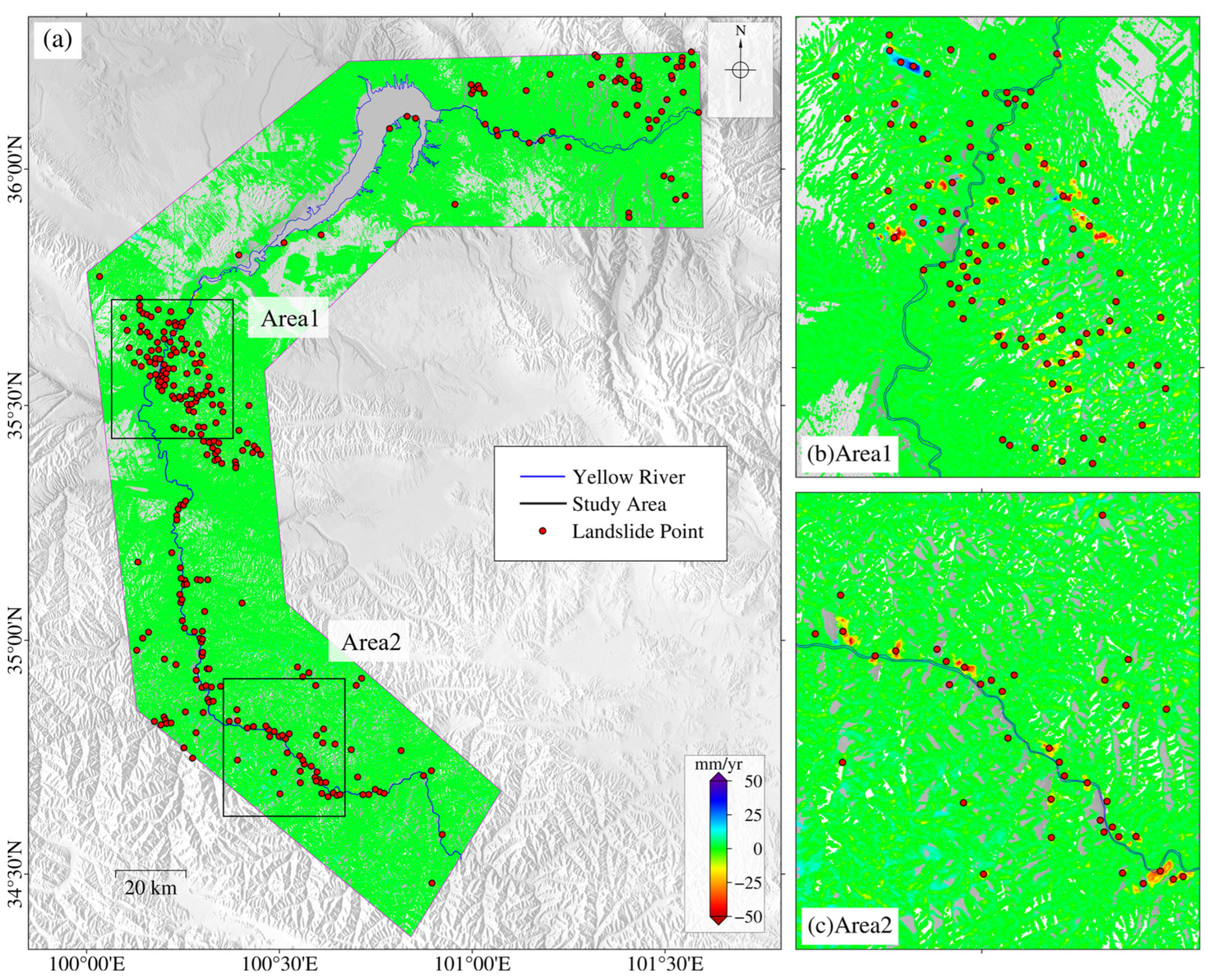
4.3. Application of the Proposed Method to the Study Area
5. Discussion
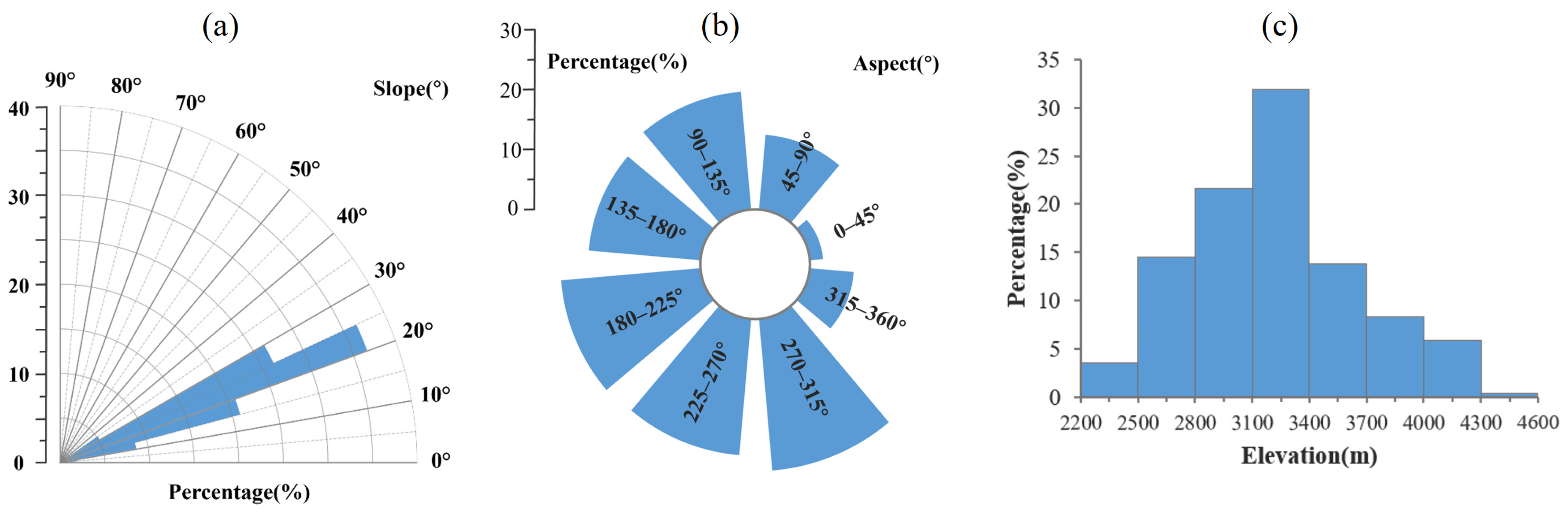
5.1. Distribution of Landslide Points in the Study Area
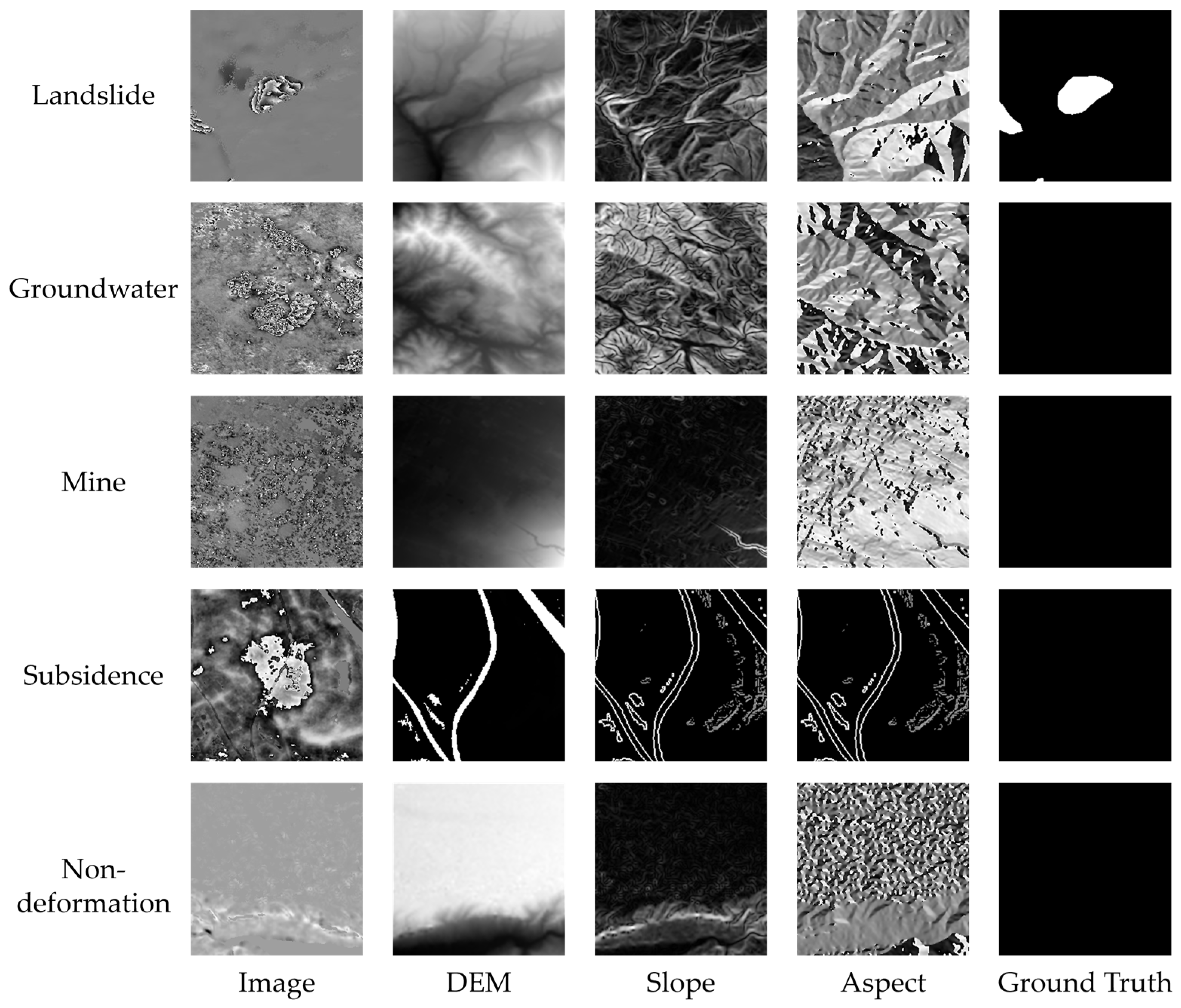
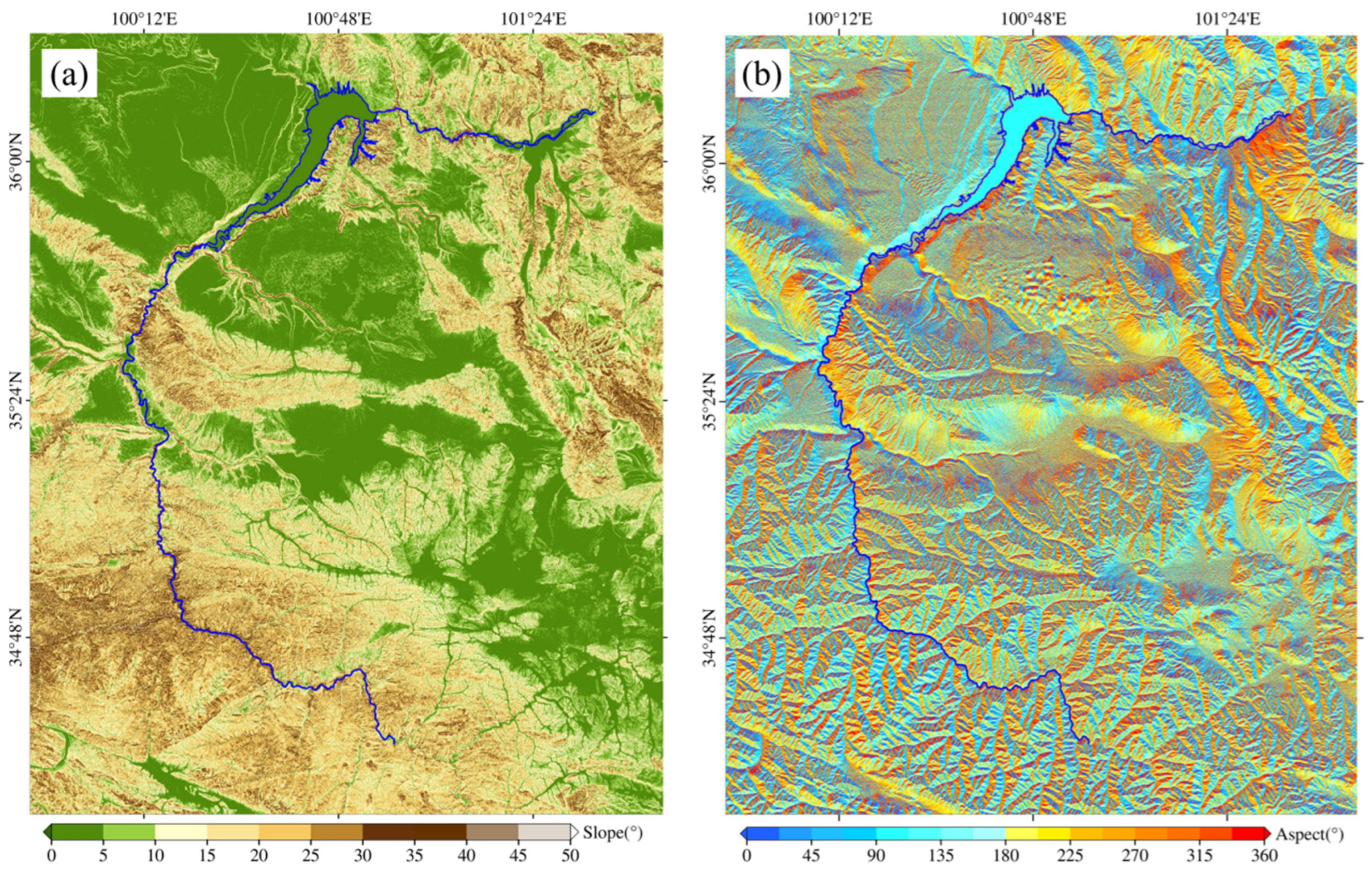
5.2. The Impact of Topographic Data on Landslide Identification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, R.; Li, W. Formation, Distribution and Risk Control of Landslides in China. J. Rock Mech. Geotech. Eng. 2011, 3, 97–116. [Google Scholar] [CrossRef]
- Chen, X.L.; Zhou, Q.; Ran, H.; Dong, R. Earthquake-Triggered Landslides in Southwest China. Nat. Hazards Earth Syst. Sci. 2012, 12, 351–363. [Google Scholar] [CrossRef]
- Froude, M.J.; Petley, D.N. Global Fatal Landslide Occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Lin, Q.; Wang, Y. Spatial and Temporal Analysis of a Fatal Landslide Inventory in China from 1950 to 2016. Landslides 2018, 15, 2357–2372. [Google Scholar] [CrossRef]
- Haque, U.; da Silva, P.F.; Devoli, G.; Pilz, J.; Zhao, B.; Khaloua, A.; Wilopo, W.; Andersen, P.; Lu, P.; Lee, J.; et al. The Human Cost of Global Warming: Deadly Landslides and Their Triggers (1995–2014). Sci. Total Environ. 2019, 682, 673–684. [Google Scholar] [CrossRef] [PubMed]
- Savvaidis, P.D. Existing landslide monitoring systems and techniques. Stars Earth Cult. 2003, 242–258. Available online: https://api.semanticscholar.org/CorpusID:43643644 (accessed on 11 June 2024).
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System Techniques in Landslide Monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Santangelo, M.; Cardinali, M.; Rossi, M.; Mondini, A.C.; Guzzetti, F. Remote Landslide Mapping Using a Laser Rangefinder Binocular and GPS. Nat. Hazards Earth Syst. Sci. 2010, 10, 2539–2546. [Google Scholar] [CrossRef]
- Gao, D.; Li, K.; Cai, Y.; Wen, T. Landslide Displacement Prediction Based on Time Series and PSO-BP Model in Three Georges Reservoir, China. J. Earth Sci. 2024, 35, 1079–1082. [Google Scholar] [CrossRef]
- Qiang, X.U.; Xiujun, D.; Weile, L.I. Integrated Space-Air-Ground Early Detection, Monitoring and Warning System for Potential Catastrophic Geohazards. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 957–966. [Google Scholar] [CrossRef]
- Zhao, C.; Kang, Y.; Zhang, Q.; Lu, Z.; Li, B. Landslide Identification and Monitoring along the Jinsha River Catchment (Wudongde Reservoir Area), China, Using the InSAR Method. Remote Sens. 2018, 10, 993. [Google Scholar] [CrossRef]
- Xiong, Z.; Feng, G.; Feng, Z.; Miao, L.; Wang, Y.; Yang, D.; Luo, S. Pre- and Post-Failure Spatial-Temporal Deformation Pattern of the Baige Landslide Retrieved from Multiple Radar and Optical Satellite Images. Eng. Geol. 2020, 279, 105880. [Google Scholar] [CrossRef]
- Chen, B.; Li, Z.; Zhang, C.; Ding, M.; Zhu, W.; Zhang, S.; Han, B.; Du, J.; Cao, Y.; Zhang, C.; et al. Wide Area Detection and Distribution Characteristics of Landslides along Sichuan Expressways. Remote Sens. 2022, 14, 3431. [Google Scholar] [CrossRef]
- Mohan, A.; Singh, A.K.; Kumar, B.; Dwivedi, R. Review on Remote Sensing Methods for Landslide Detection Using Machine and Deep Learning. Trans. Emerg. Telecommun. Technol. 2021, 32, e3998. [Google Scholar] [CrossRef]
- Rawat, W.; Wang, Z. Deep Convolutional Neural Networks for Image Classification: A Comprehensive Review. Neural Comput. 2017, 29, 2352–2449. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Zhang, Q.; Wu, Z. A Deep-Learning-Facilitated, Detection-First Strategy for Operationally Monitoring Localized Deformation with Large-Scale InSAR. Remote Sens. 2023, 15, 2310. [Google Scholar] [CrossRef]
- Ullo, S.L.; Mohan, A.; Sebastianelli, A.; Ahamed, S.E.; Kumar, B.; Dwivedi, R.; Sinha, G.R. A New Mask R-CNN-Based Method for Improved Landslide Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3799–3810. [Google Scholar] [CrossRef]
- Long, Y.; Gong, Y.; Xiao, Z.; Liu, Q. Accurate Object Localization in Remote Sensing Images Based on Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2486–2498. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Xun, Z.; Zhao, C.; Kang, Y.; Liu, X.; Liu, Y.; Du, C. Automatic Extraction of Potential Landslides by Integrating an Optical Remote Sensing Image with an InSAR-Derived Deformation Map. Remote Sens. 2022, 14, 2669. [Google Scholar] [CrossRef]
- Qiang, X.U. Understanding and Consideration of Related Issues in Early Identification of Potential Geohazards. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1651–1659. [Google Scholar] [CrossRef]
- Jianjun, Z.H.U.; Jun, H.U.; Zhiwei, L.I.; Qian, S.U.N.; Wanji, Z. Recent Progress in Landslide Monitoring with InSAR. Acta Geod. Et Cartogr. Sin. 2022, 51, 2001. [Google Scholar] [CrossRef]
- Liang, F.; Jia, T.; Zeng, Z. SA-Unet: A Phase Unwrapping method based on DCNN. In Proceedings of the 2022 12th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Baishan, China, 27–31 July 2022; pp. 912–917. [Google Scholar]
- Guo, H.; Yi, B.; Yao, Q.; Gao, P.; Li, H.; Sun, J.; Zhong, C. Identification of Landslides in Mountainous Area with the Combination of SBAS-InSAR and Yolo Model. Sensors 2022, 22, 6235. [Google Scholar] [CrossRef] [PubMed]
- Fu, L.; Zhang, Q.; Wang, T.; Li, W.; Xu, Q.; Ge, D. Detecting Slow-Moving Landslides Using InSAR Phase-Gradient Stacking and Deep-Learning Network. Front. Environ. Sci. 2022, 10, 963322. [Google Scholar] [CrossRef]
- Chen, X.; Yao, X.; Zhou, Z.; Liu, Y.; Yao, C.; Ren, K. DRs-UNet: A Deep Semantic Segmentation Network for the Recognition of Active Landslides from InSAR Imagery in the Three Rivers Region of the Qinghai–Tibet Plateau. Remote Sens. 2022, 14, 1848. [Google Scholar] [CrossRef]
- Osmanoğlu, B.; Sunar, F.; Wdowinski, S.; Cabral-Cano, E. Time Series Analysis of InSAR Data: Methods and Trends. ISPRS J. Photogramm. Remote Sens. 2016, 115, 90–102. [Google Scholar] [CrossRef]
- Budimir, M.E.A.; Atkinson, P.M.; Lewis, H.G. A Systematic Review of Landslide Probability Mapping Using Logistic Regression. Landslides 2015, 12, 419–436. [Google Scholar] [CrossRef]
- Yin, W.; Niu, C.; Bai, Y.; Zhang, L.; Ma, D.; Zhang, S.; Zhou, X.; Xue, Y. An Adaptive Identification Method for Potential Landslide Hazards Based on Multisource Data. Remote Sens. 2023, 15, 1865. [Google Scholar] [CrossRef]
- Zhao, Y.; Feng, G.; Wang, Y.; Wang, X.; Wang, Y.; Lu, H.; Xu, W.; Wang, H. A New Algorithm for Intelligent Detection of Geohazards Incorporating Attention Mechanism. Int. J. Appl. Earth Obs. Geoinf. 2022, 113, 102988. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8 September 2018; pp. 3–19. [Google Scholar]
- Liu, X.; Peng, Y.; Lu, Z.; Li, W.; Yu, J.; Ge, D.; Xiang, W. Feature-Fusion Segmentation Network for Landslide Detection Using High-Resolution Remote Sensing Images and Digital Elevation Model Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Luo, S.; Feng, G.; Xiong, Z.; Wang, H.; Zhao, Y.; Li, K.; Deng, K.; Wang, Y. An Improved Method for Automatic Identification and Assessment of Potential Geohazards Based on MT-InSAR Measurements. Remote Sens. 2021, 13, 3490. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, G.; Li, Z.; Xu, W.; Zhu, J.; He, L.; Xiong, Z.; Qiao, X. Retrieving the Displacements of the Hutubi (China) Underground Gas Storage during 2003–2020 from Multi-Track InSAR. Remote Sens. Environ. 2022, 268, 112768. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhang, M.; Ma, J.; Xing, G.; Feng, G.; An, Q. InSAR-Based Landslide Detection Method with the Assistance of C-Index. Landslides 2023, 20, 2709–2723. [Google Scholar] [CrossRef]
- Anantrasirichai, N.; Biggs, J.; Albino, F.; Bull, D. The Application of Convolutional Neural Networks to Detect Slow, Sustained Deformation in InSAR Time Series. Geophys. Res. Lett. 2019, 46, 11850–11858. [Google Scholar] [CrossRef]
- Jianbing, P.; Hengxing, L.a.N.; Hui, Q.; Wenke, W.; Rongxi, L.I.; Zhenhong, L.I.; Jianqi, Z.; Xin, L.I.U.; Shijie, L.I.U. Scientific Research Framework of Livable Yellow River. Gcdzxb 2020, 28, 189–201. [Google Scholar] [CrossRef]
- Yin, Z.; Qin, X.; Zhao, W. Characteristics of Landslides from Sigou Gorge to Lagan Gorge in the Upper Reaches of Yellow River. In Proceedings of the Landslide Science for a Safer Geoenvironment; Sassa, K., Canuti, P., Yin, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 397–406. [Google Scholar] [CrossRef]
- Du, J.; Li, Z.; Song, C.; Zhu, W.; Ji, Y.; Zhang, C.; Chen, B.; Su, S. InSAR-Based Active Landslide Detection and Characterization Along the Upper Reaches of the Yellow River. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 3819–3830. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Gamma SAR and interferometric processing software. In Proceedings of the ERS-ENVISAT Symposium, Gothenburg, Sweden, 15–20 October 2000; Sawaya-Lacoste, H., Ed.; European Space Agency Publications Division: Noordwijk, The Netherlands, 2001. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-cam: Visual explanations from deep networks via gradient-based localization. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Lecture Notes in Computer Science, Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Chun-hao, W.U.; Peng, C.U.I.; Yu-sheng, L.I.; Alcántara, A.I.; Chao, H.; Shu-jian, Y.I. Seismogenic Fault and Topography Control on the Spatial Patterns of Landslides Triggered by the 2017 Jiuzhaigou Earthquake. Sdkxxb 2018, 15, 793–807. [Google Scholar] [CrossRef]
- Çellek, S. Effect of the Slope Angle and Its Classification on Landslide. Nat. Hazards Earth Syst. Sci. Discuss. 2020, 1–23. [Google Scholar] [CrossRef]
- Sakkas, G.; Misailidis, I.; Sakellariou, N.; Kouskouna, V.; Kaviris, G. Modeling Landslide Susceptibility in Greece: A Weighted Linear Combination Approach Using Analytic Hierarchical Process, Validated with Spatial and Statistical Analysis. Nat. Hazards 2016, 84, 1873–1904. [Google Scholar] [CrossRef]
- Chen, H.; He, Y.; Zhang, L.; Yang, W.; Liu, Y.; Gao, B.; Zhang, Q.; Lu, J. A Multi-Input Channel U-Net Landslide Detection Method Fusing SAR Multisource Remote Sensing Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 1215–1232. [Google Scholar] [CrossRef]
- Zêzere, J.L. Landslide Susceptibility Assessment Considering Landslide Typology. A Case Study in the Area North of Lisbon (Portugal). Nat. Hazards Earth Syst. Sci. 2002, 2, 73–82. [Google Scholar] [CrossRef]
- Abedini, M.; Tulabi, S. Assessing LNRF, FR, and AHP Models in Landslide Susceptibility Mapping Index: A Comparative Study of Nojian Watershed in Lorestan Province, Iran. Environ. Earth Sci. 2018, 77, 405. [Google Scholar] [CrossRef]
- Cellek, S. The Effect of Aspect on Landslide and Its Relationship with Other Parameters. In Landslides; IntechOpen: London, UK, 2021; ISBN 978-1-83969-024-2. [Google Scholar]
- Chen, W.; Xie, X.; Wang, J.; Pradhan, B.; Hong, H.; Bui, D.T.; Duan, Z.; Ma, J. A Comparative Study of Logistic Model Tree, Random Forest, and Classification and Regression Tree Models for Spatial Prediction of Landslide Susceptibility. Catena 2017, 151, 147–160. [Google Scholar] [CrossRef]
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools Version 6. Geochem. Geophys. Geosyst. 2019, 20, 5556–5564. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Band (Wavelength/cm) | Track Direction | Orbit | Pixel Spacing (Rg × Az) | Incidence Angle | Heading Angle | Number of Scenes |
|---|---|---|---|---|---|---|---|
| Sentinel-1 | C (5.6) | Ascending | T26 | 2.33 × 13.96 m | 40.76° | 13.08° | 57 |
| C (5.6) | Descending | T33 | 2.33 × 13.96 m | 39.43° | 193.08° | 69 |
| Method and Data | Precision (%) | Recall (%) | F1 (%) | mIOU (%) | Kappa (%) | |
|---|---|---|---|---|---|---|
| Only image | 90.51 | 87.55 | 89.01 | 89.71 | 88.62 | |
| Feature fusion | Image + DEM | 91.89 | 90.46 | 91.17 | 91.55 | 90.83 |
| Image + Aspect | 91.53 | 89.31 | 90.41 | 90.88 | 90.04 | |
| Image + Slope | 92.83 | 89.16 | 90.96 | 91.36 | 90.61 | |
| Feature extraction + Feature fusion | Image + DEM | 92.24 | 90.17 | 91.19 | 91.57 | 90.85 |
| Image + Aspect | 91.80 | 91.85 | 91.82 | 92.12 | 91.50 | |
| Image + Slope | 92.60 | 92.31 | 92.45 | 92.69 | 92.16 | |
| Data | Method | Precision (%) | Recall (%) | F1 (%) | mIOU (%) | Kappa (%) |
|---|---|---|---|---|---|---|
| Only image | U-Net | 89.98 | 84.98 | 87.41 | 88.34 | 86.93 |
| SegNet | 82.45 | 64.57 | 72.42 | 77.43 | 71.48 | |
| FCN | 89.12 | 87.82 | 88.47 | 89.21 | 88.02 | |
| MSFD-Net | 90.51 | 87.55 | 89.01 | 89.71 | 88.62 | |
| Image + Slope | U-Net | 90.70 | 87.97 | 89.32 | 89.94 | 88.91 |
| SegNet | 76.15 | 76.52 | 76.33 | 79.94 | 75.41 | |
| FCN | 90.55 | 86.85 | 88.66 | 89.38 | 88.23 | |
| MSFD-Net | 92.60 | 92.31 | 92.45 | 92.69 | 92.16 |
| Method | Params (M) | GFLOPs (G) | Size (MB) |
|---|---|---|---|
| U-Net | 17.31 | 32.37 | 66.04 |
| SegNet | 29.48 | 32.36 | 112.49 |
| FCN | 20.14 | 18.73 | 76.85 |
| MSFD-Net | 4.08 | 9.06 | 15.55 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Feng, G.; Zhao, Y.; Xiong, Z.; He, L.; Wang, X.; Wang, W.; An, Q. A Deep-Learning-Based Algorithm for Landslide Detection over Wide Areas Using InSAR Images Considering Topographic Features. Sensors 2024, 24, 4583. https://doi.org/10.3390/s24144583
Li N, Feng G, Zhao Y, Xiong Z, He L, Wang X, Wang W, An Q. A Deep-Learning-Based Algorithm for Landslide Detection over Wide Areas Using InSAR Images Considering Topographic Features. Sensors. 2024; 24(14):4583. https://doi.org/10.3390/s24144583
Chicago/Turabian StyleLi, Ning, Guangcai Feng, Yinggang Zhao, Zhiqiang Xiong, Lijia He, Xiuhua Wang, Wenxin Wang, and Qi An. 2024. "A Deep-Learning-Based Algorithm for Landslide Detection over Wide Areas Using InSAR Images Considering Topographic Features" Sensors 24, no. 14: 4583. https://doi.org/10.3390/s24144583