
Research on Leak Detection of Low-Pressure Gas Pipelines in Buildings Based on Improved Variational Mode Decomposition and Robust Kalman Filtering

Abstract
:1. Introduction
2. Methodology
2.1. Robust Kalman Filter
2.2. Variational Mode Decomposition
2.3. Adaptive Calculation of Modal Parameter K Based on Improved Scale-Space Theory
2.3.1. Scale-Space Representation of the Frequency Spectrum
2.3.2. Period Calculation of Low-Frequency Noise in Complex Signals
2.3.3. Adaptive Method of Scale-Space Threshold Based on WAA
2.4. Adaptive Calculation Model of Penalty Parameter
2.5. Adaptive Signal Reconstruction Method Based on Fourier Series
3. Implementation Process for Leak Detection
- (1)
- The pressure signals are collected by the sensor at the starting point of the low-pressure pipeline system.
- (2)
- The collected pressure signals are denoised by the robust Kalman filter, so as to improve the accuracy of the VMD decomposition.
- (3)
- The periodic detection is carried out through the WAA to calculate the dominant frequency of the low-frequency periodic noise in complex signals.
- (4)
- The spectra of the signals are characterized in discrete scale space, and the threshold is adaptively determined to obtain the modal parameter K of VMD.
- (5)
- According to the dominant frequency of the periodic noise and the sampling frequency , the penalty parameter of VMD is calculated by Equation (28).
- (6)
- Based on the parameters mentioned above, VMD is used to decompose the denoised signal.
- (7)
- The decomposed signal is reconstructed based on the Fourier series to obtain the baseline representing the pressure fluctuation trend.
- (8)
- The trend feature indicators [3] of the baseline are calculated and the conditions represented by the pressure fluctuation trend are identified.
4. Simulation Study
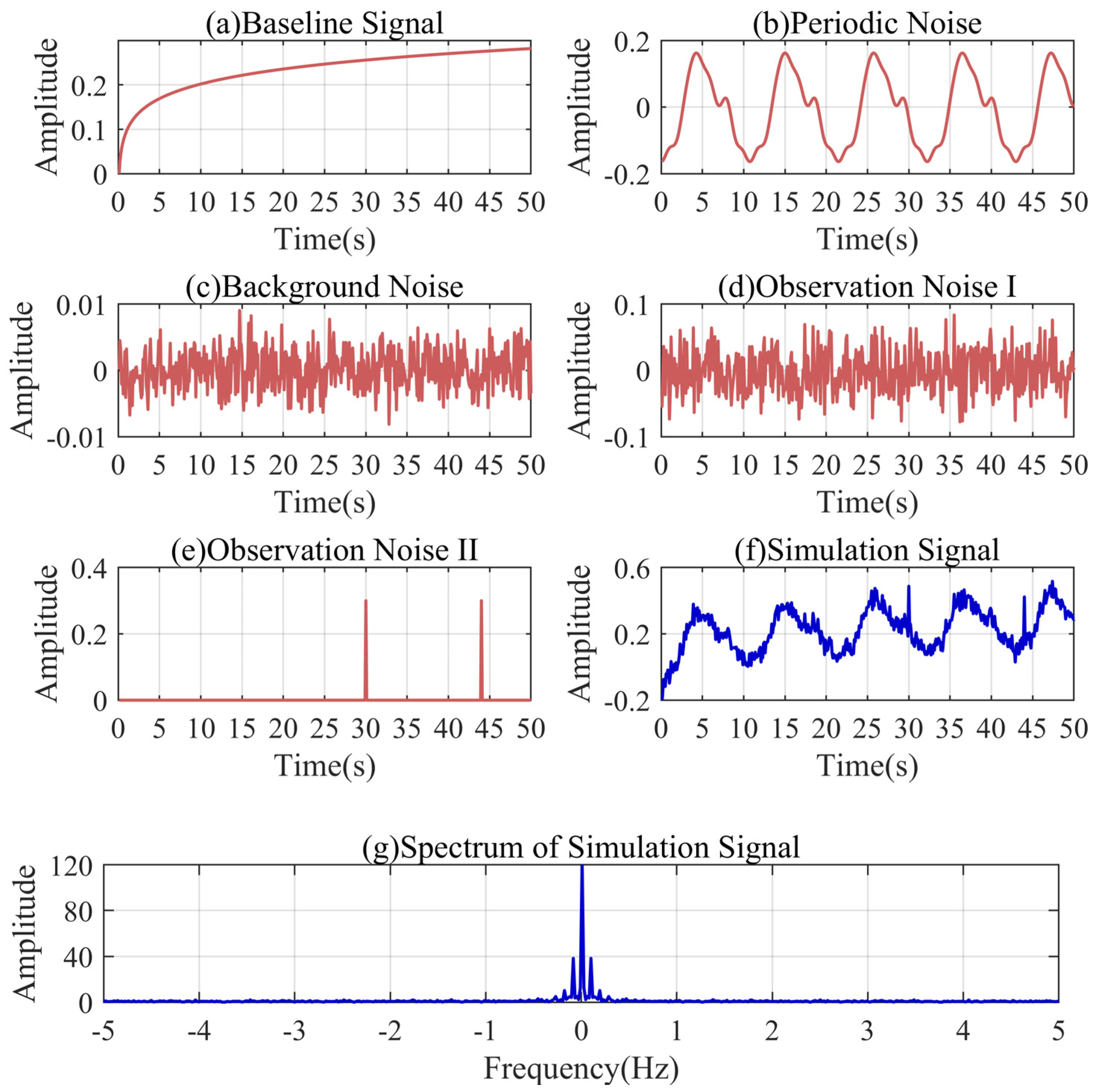
4.1. Simulation Signals
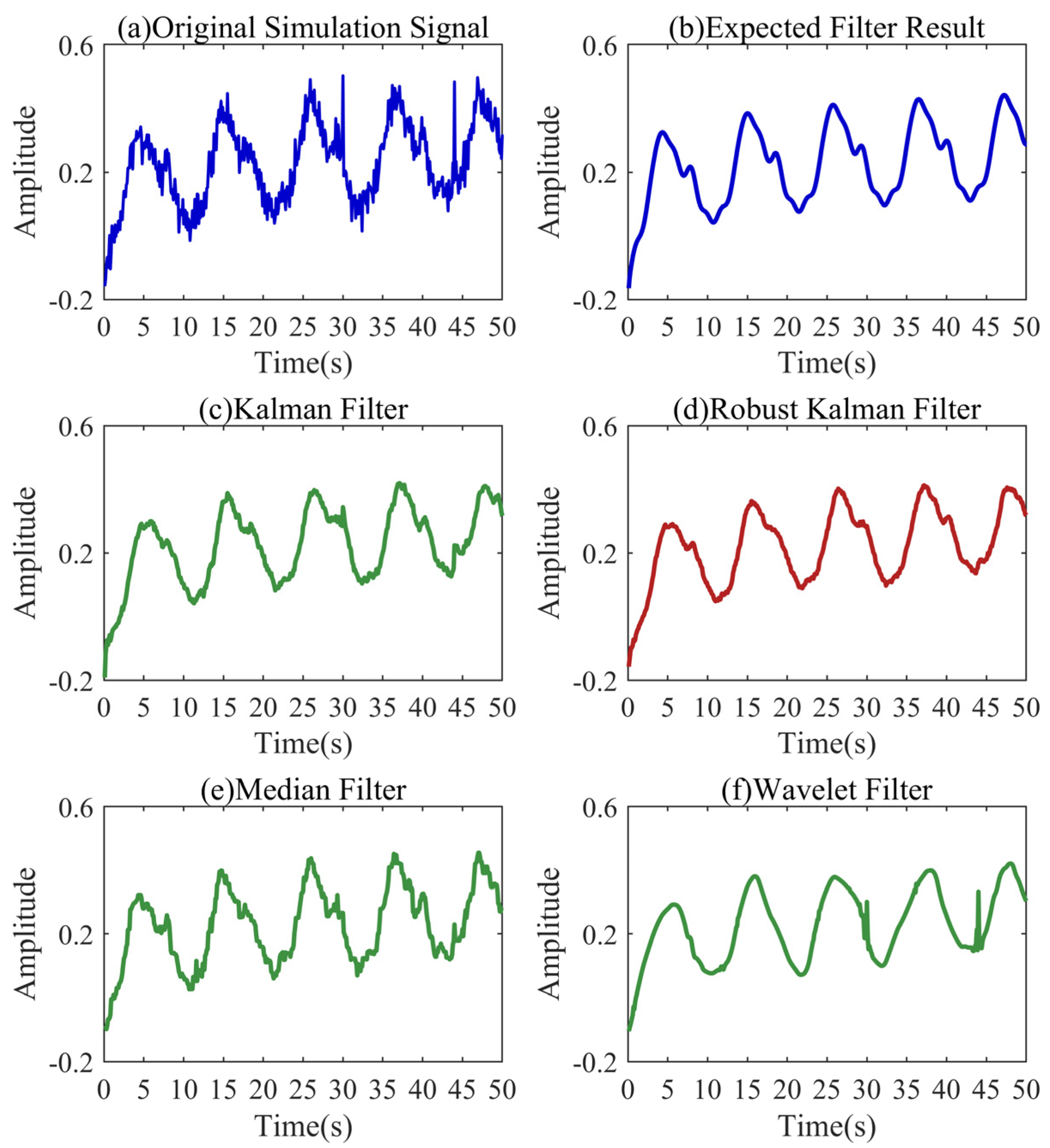
4.2. Simulation Signal Denoising Based on Robust Kalman Filter
4.3. Simulation Signal Period Extraction Based on WAA
4.4. Adaptive Spectrum Partition Based on Discrete Scale Space
4.5. Improved VMD Decomposition of Simulation Signal
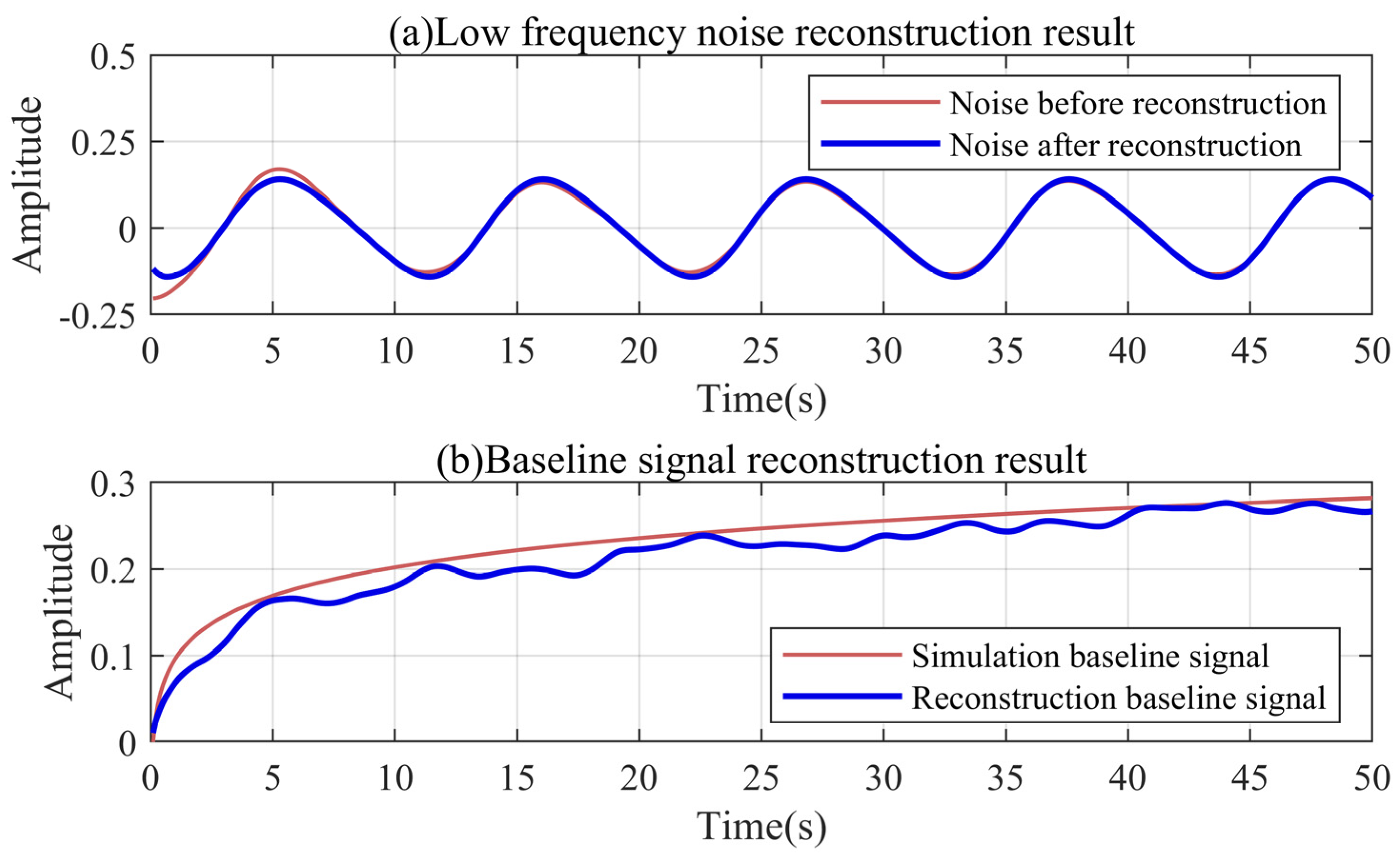
4.6. Reconstruction Results of Simulation Signal Based on Fourier Series
5. Leak Detection Based on Actual Signals
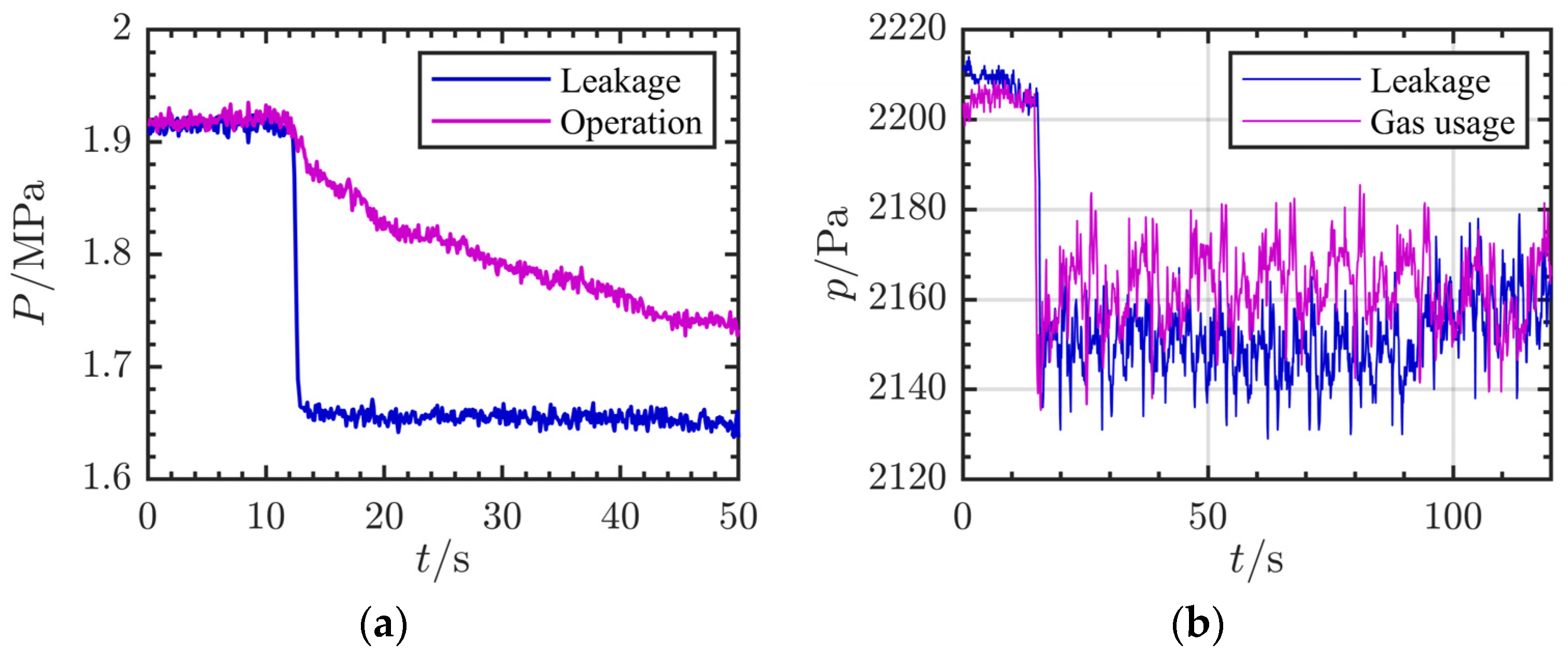
5.1. Actual Signals
5.2. Actual Signal Denoising Based on Robust Kalman Filter
5.3. Actual Signal Period Extraction Based on WAA
5.4. Adaptive Spectrum Partition Based on Discrete Scale Space
5.5. Improved VMD Decomposition Results of Actual Signal
5.6. Reconstruction Results of Actual Signals Based on Fourier Series
5.7. Leak Detection Results Based on Actual Signals
6. Conclusions
- (1)
- Compared with the Kalman filtering, median filtering, and wavelet soft threshold filtering, the robust Kalman filtering has obvious advantages in denoising the complex pressure signals of low-pressure pipelines. It can more accurately estimate the true state of the signal, and has a stronger anti-interference ability with respect to gross errors.
- (2)
- The discrete scale space based on the WAA can reasonably segment the spectrum of the pressure signal, so as to adaptively calculate the modal parameter K of VMD. Based on the dominant frequency of the low-frequency periodic noise calculated by the WAA, the calculation model of the penalty parameter was established.
- (3)
- The improved VMD can effectively separate the baseline signal and noise signal in the complex pressure signal. Compared with EMD and wavelet analysis, the anti-mode aliasing ability and effective frequency band separation ability of the improved VMD are prominent.
- (4)
- The signal adaptive reconstruction method based on the Fourier series can effectively remove the trend component contained in the low-frequency IMF, which is caused by the boundary effect in the VMD decomposition process.
- (5)
- Based on the robust Kalman filter and the improved VMD, the fluctuation trend of the negative pressure wave after the pressure drop can be accurately quantified as the core basis of leakage detection. Based on the reconstructed baseline signal, the detection accuracy of the small leakage reached 96.7% and the detection accuracy of the large leakage reached 73.3%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Buonanno, G.; Carotenuto, A.; Dell”Isola, M. The influence of reference condition correction on natural gas flow measurement. Measurement 1998, 23, 77–91. [Google Scholar] [CrossRef]
- Dell’Isola, M.; Cannizzo, M.; Diritti, M. Measurement of high-pressure natural gas flow using ultrasonic flowmeters. Measurement 1997, 20, 75–89. [Google Scholar] [CrossRef]
- Tian, X.; Jiao, W.; Liu, T.; Ren, L.; Song, B. Leakage detection of low-pressure gas distribution pipeline system based on linear fitting and extreme learning machine. Int. J. Press. Vessel. Pip. 2021, 194, 104553. [Google Scholar] [CrossRef]
- Baalisampang, T.; Abbassi, R.; Garaniya, V.; Khan, F.; Dadashzadeh, M. Review and analysis of fire and explosion accidents in maritime transportation. Ocean. Eng. 2018, 158, 350–366. [Google Scholar] [CrossRef]
- Middha, P.; Engel, D.; Hansen, O.R. Can the addition of hydrogen to natural gas reduce the explosion risk. Int. J. Hydrogen Energy 2011, 36, 2628–2636. [Google Scholar] [CrossRef]
- Tian, Y.; Jiang, Y.; Liu, Q.; Dong, M.; Xu, D.; Liu, Y.; Xu, X. Using a water quality index to assess the water quality of the upper and middle streams of the Luanhe River, northern China. Sci. Total Environ. 2019, 667, 142–151. [Google Scholar] [CrossRef]
- Tijani, I.A.; Zayed, T. Gene Expression Programming Based Mathematical Modeling for Leak Detection of Water Distribution Networks. Measurement 2021, 188, 110611. [Google Scholar] [CrossRef]
- Ege, Y.; Coramik, M. A new measurement system using magnetic flux leakage method in pipeline inspection. Measurement 2018, 123, 163–174. [Google Scholar] [CrossRef]
- Coramik, M.; Ege, Y. Discontinuity Inspection in Pipelines: A Comparison Review. Measurement 2017, 111, 359–373. [Google Scholar] [CrossRef]
- Peng, S.; Liu, E. Oil and Gas Pipeline Leakage Detection Based on Transient Model. In Proceedings of the International Conference on Computational & Information Sciences, Chengdu, China, 21–23 October 2011; IEEE Computer Society: Washington, DC, USA, 2011. [Google Scholar]
- Miller, R.; Pollock, A.; Watts, D.; Carlyle, J.; Tafuri, A.; Yezzi, J. A reference standard for the development of acoustic emission pipeline leak detection techniques. Ndt E Int. 1999, 32, 1–8. [Google Scholar] [CrossRef]
- Maraval, D.; Gabet, R.; Jaouen, Y.; Lamour, V. Dynamic Optical Fiber Sensing with Brillouin Optical Time Domain Reflectometry: Application to Pipeline Vibration Monitoring. J. Light. Technol. 2017, 16, 1. [Google Scholar] [CrossRef]
- Davis, R.J.; Bubenik, T.A.; Crouch, A.E. Feasibility of Magnetic Flux Leakage In-Line Inspection as a Method to Detect and Characterize Mechanical Damage. Final Report, October 1994–May 1996; Battelle Memorial Institution: Columbus, OH, USA, 1996. [Google Scholar]
- Silva, R.A.; Buiatti, C.M.; Cruz, S.L.; Pereira, J.A. Pressure wave behavior and leak detection in pipelines. Comput. Chem. Eng. 1996, 20, S491–S496. [Google Scholar] [CrossRef]
- Ghidaoui, M.S.; Zhao, M.; McInnis, D.A.; Axworthy, D.H. A Review of Water Hammer Theory and Practice. Appl. Mech. Rev. 2005, 58, 49. [Google Scholar] [CrossRef]
- Duan, H.F.; Pan, B.; Wang, M.; Chen, L.; Zheng, F.; Zhang, Y. State-of-the-art review on the transient flow modeling and utilization for urban water supply system (UWSS) management. J. Water Supply Res. Technol. AQUA 2020, 69, 858–893. [Google Scholar] [CrossRef]
- Schmitt, C.; Pluvinage, G.; Hadj-Taieb, E.; Akid, R. Water pipeline failure due to water hammer effects. Fatigue Fract. Eng. Mater. Struct. 2010, 29, 1075–1082. [Google Scholar] [CrossRef]
- Ferrante, M.; Brunone, B.; Meniconi, S.; Karney, B.W.; Massari, C. Leak size, detectability and test conditions in pressurized pipe systems. How leak size and system functioning conditions affect the effectiveness of leak detection techniques. Water Resour. Manag. EWRA 2014, 28, 4583–4598. [Google Scholar]
- Jannasch, A.-K.; Silversand, F.; Berger, M.; Dupuis, D.; Tena, E. Development of a novel catalytic burner for natural gas combustion for gas stove and cooking plate applications. Catal. Today 2006, 117, 433–437. [Google Scholar]
- Christian, R.G.; Leck, J.H.; Werner, J.G. An evaluation of the performance of gas flow meters which use a porous membrane as the control element. Vacuum 1966, 16, 609–611. [Google Scholar] [CrossRef]
- Gardner, C.; Hosseini, S.; Lawn, C.J. Prediction of Self Excitation Frequencies and Amplitudes for a Model Gas Turbine Burner. J. Acoust. Soc. Am. 2008, 123, 3403. [Google Scholar] [CrossRef]
- Deering, R.; Kaiser, J.F. The use of a masking signal to improve empirical mode decomposition. In Proceedings of the IEEE International Conference on Acoustics, Philadelphia, PA, USA, 18–23 March 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Kurzyna, J.; Mazouffre, S.; Lazurenko, A.; Albarède, L.; Bonhomme, G.; Makowski, K.; Dudeck, M.; Peradzyński, Z. Spectral analysis of Hall-effect thruster plasma oscillations based on the empirical mode decomposition. Phys. Plasmas 2005, 12, 123506. [Google Scholar] [CrossRef]
- Siddique, M.F.; Ahmad, Z.; Ullah, N.; Kim, J. A Hybrid Deep Learning Approach: Integrating Short-Time Fourier Transform and Continuous Wavelet Transform for Improved Pipeline Leak Detection. Sensors 2023, 23, 8079. [Google Scholar] [CrossRef] [PubMed]
- Benmoussa, S.; Djeziri, M.A.; Bouamama, B.O.; Merzouki, R. Empirical Mode Decomposition Applied to Fluid Leak Detection and Isolation in Process Engineering. In Proceedings of the 18th Mediterranean Conference on Control & Automation (MED), Marrakech, Morocco, 23–25 June 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Echeverría, J.C.; Crowe, J.; Woolfson, M.S.; Hayes-Gill, B.R. Application of empirical mode decomposition to heart rate variability analysis. Med. Biol. Eng. Comput. 2001, 39, 471. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Lu, C. Application of an improved variational mode decomposition algorithm in leakage location detection of water supply pipeline. Measurement 2020, 173, 108587. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Qian, Z.; Lu, C. Research on VMD based adaptive denoising method applied to water supply pipeline leakage location. Measurement 2019, 151, 107153. [Google Scholar] [CrossRef]
- Yang, T.; Yu, X.; Li, G.; Dou, J.; Duan, B. An early fault diagnosis method based on the optimization of a variational modal decomposition and convolutional neural network for aeronautical hydraulic pipe clamps. Meas. Sci. Technol. 2020, 31, 055007. [Google Scholar]
- Lahmiri, S. Intraday Stock Price Forecasting Based on Variational Mode Decomposition. J. Comput. Sci. 2016, 12, 23–27. [Google Scholar] [CrossRef]
- Yi, C.C.; Lv, Y.; Dang, Z. A fault diagnosis scheme for rolling bearing based on particle swarm optimization in variational mode decomposition. Shock Vib. 2016, 2016, 9372691. [Google Scholar] [CrossRef]
- Huang, Y.; Lin, J.; Liu, Z.; Wu, W. A modified scale-space guiding variational mode decomposition for high-speed railway bearing fault diagnosis. J. Sound Vib. 2019, 444, 216–234. [Google Scholar] [CrossRef]
- Lu, J.; Yue, J.; Zhu, L.; Li, G. Variational mode decomposition denoising combined with improved Bhattacharyya distance. Measurement 2019, 151, 107283. [Google Scholar] [CrossRef]
- Huang, S.; Sun, H.; Wang, S.; Qu, K.; Zhao, W.; Peng, L. SSWT and VMD Linked Mode Identification and Time-of-Flight Extraction of Denoised SH Guided Waves. IEEE Sens. J. 2021, 21, 14709–14717. [Google Scholar] [CrossRef]
- Delgado-Aguiñaga, J.A.; Puig, V.; Becerra-López, F.I. Leak diagnosis in pipelines based on a Kalman filter for Linear Parameter Varying systems. Control. Eng. Pract. 2021, 115, 104888. [Google Scholar] [CrossRef]
- An, L.; Sepehri, N. Leakage fault identification in a hydraulic positioning system using extended Kalman filter. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar]
- Delgado-Aguiñaga, J.; Besançon, G.; Begovich, O.; Carvajal, J. Multi-leak diagnosis in pipelines based on Extended Kalman Filter. Control. Eng. Pract. 2016, 49, 139–148. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 105011. [Google Scholar] [CrossRef]
- Zhu, J.; Blab, C.; Wei, N.; Ran, Y.; Lin, H. Research on leak location method of water supply pipeline based on negative pressure wave technology and VMD algorithm. Measurement 2021, 186, 110235. [Google Scholar]
- Lindeberg, T. Scale-space for discrete signals. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 234–254. [Google Scholar] [CrossRef]
- Gilles, J.; Heal, K. A parameterless scale-space approach to find meaningful modes in histograms—Application to image and spectrum segmentation. Int. J. Wavelets Multiresolution Inf. Process. 2014, 12, 1450044. [Google Scholar] [CrossRef]
- Lindeberg, T. Scale-Space Theory in Computer Vision; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Serra, J.; Vincent, L. An overview of morphological filtering. Circuits Syst. Signal Process. 1992, 11, 47–108. [Google Scholar] [CrossRef]
- Sun, Y.; Chan, K.L.; Krishnan, S.M. ECG signal conditioning by morphological filtering. Comput. Biol. Med. 2002, 32, 465–479. [Google Scholar] [CrossRef]
- Ross, M.; Shaffer, H.; Cohen, A.; Freudberg, R.; Manley, H. Average magnitude difference function pitch extractor. IEEE Trans. Acoust. Speech Signal Process. 1974, 22, 353–362. [Google Scholar] [CrossRef]
- Rabiner, L. On the use of autocorrelation analysis for pitch detection. IEEE Trans. Acoust. Speech Signal Process. 1977, 25, 24–33. [Google Scholar] [CrossRef]
- Abdullah-Al-Mamun, K.; Sarker, F.; Muhammad, G. A high resolution pitch detection algorithm based on AMDF and ACF. J. Sci. Res. 2009, 1, 508–515. [Google Scholar] [CrossRef]
- Li, J.; Yao, X.; Wang, H.; Zhang, J. Periodic impulses extraction based on improved adaptive VMD and sparse code shrinkage denoising and its application in rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2019, 126, 568–589. [Google Scholar] [CrossRef]
- Deuzé, J.L.; Herman, M.; Santer, R. Fourier series expansion of the transfer equation in the atmosphere-ocean system. J. Quant. Spectrosc. Radiat. Transf. 1989, 41, 483–494. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic Indicators | Large Fire | Small Fire | Large Leakage | Small Leakage |
|---|---|---|---|---|
| Mean | 2069.5 Pa | 2090.6 Pa | 2048.3 Pa | 2220.8 Pa |
| Variance | 456.3 Pa | 724.3 Pa | 76.3 Pa | 40.3 Pa |
| Duration | 8.5 s | 8.2 s | 9.1 s | 4 s |
| Linear fitting slope | 6.9 Pa/s | 12.2 Pa/s | 1.4 Pa/s | −3.8 Pa/s |
| Head-to-tail difference | 78 Pa | 115.5 Pa | 14 Pa | −12 Pa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.; Tian, X. Research on Leak Detection of Low-Pressure Gas Pipelines in Buildings Based on Improved Variational Mode Decomposition and Robust Kalman Filtering. Sensors 2024, 24, 4590. https://doi.org/10.3390/s24144590
Lin W, Tian X. Research on Leak Detection of Low-Pressure Gas Pipelines in Buildings Based on Improved Variational Mode Decomposition and Robust Kalman Filtering. Sensors. 2024; 24(14):4590. https://doi.org/10.3390/s24144590
Chicago/Turabian StyleLin, Wenfeng, and Xinghao Tian. 2024. "Research on Leak Detection of Low-Pressure Gas Pipelines in Buildings Based on Improved Variational Mode Decomposition and Robust Kalman Filtering" Sensors 24, no. 14: 4590. https://doi.org/10.3390/s24144590
APA StyleLin, W., & Tian, X. (2024). Research on Leak Detection of Low-Pressure Gas Pipelines in Buildings Based on Improved Variational Mode Decomposition and Robust Kalman Filtering. Sensors, 24(14), 4590. https://doi.org/10.3390/s24144590