Weather Radar Calibration Method Based on UAV-Suspended Metal Sphere

Abstract
:1. Introduction
2. Materials and Methods
2.1. Theoretical Parameter Calculation for Metal Spheres
2.1.1. Reflectivity Factor
- Theoretical Value.
- 2.
- Measured value.
2.1.2. Differential Reflectivity
2.1.3. Correlation Coefficient
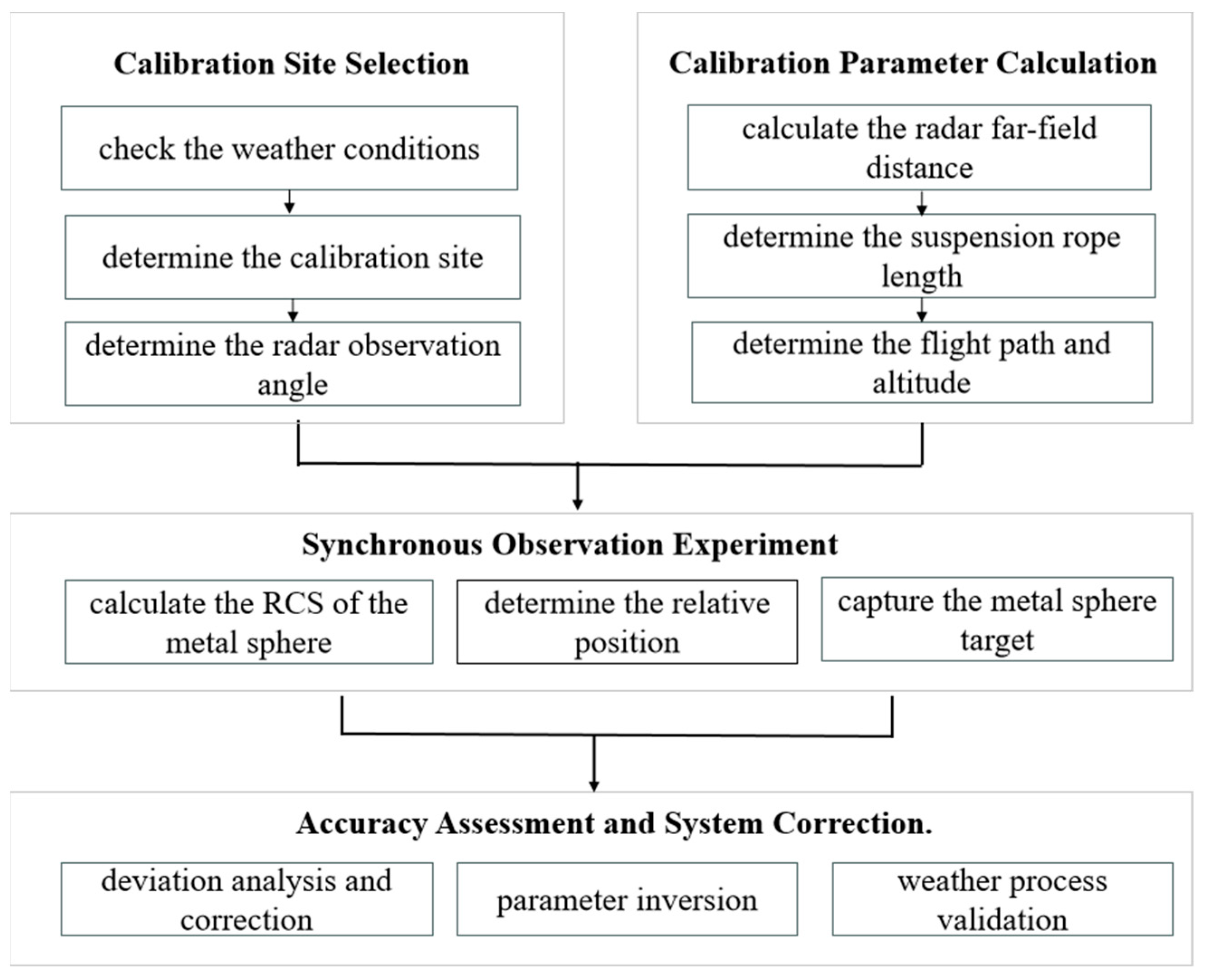
2.2. Far-Field Calibration Methods and Procedures
- Site Selection.
- 2.
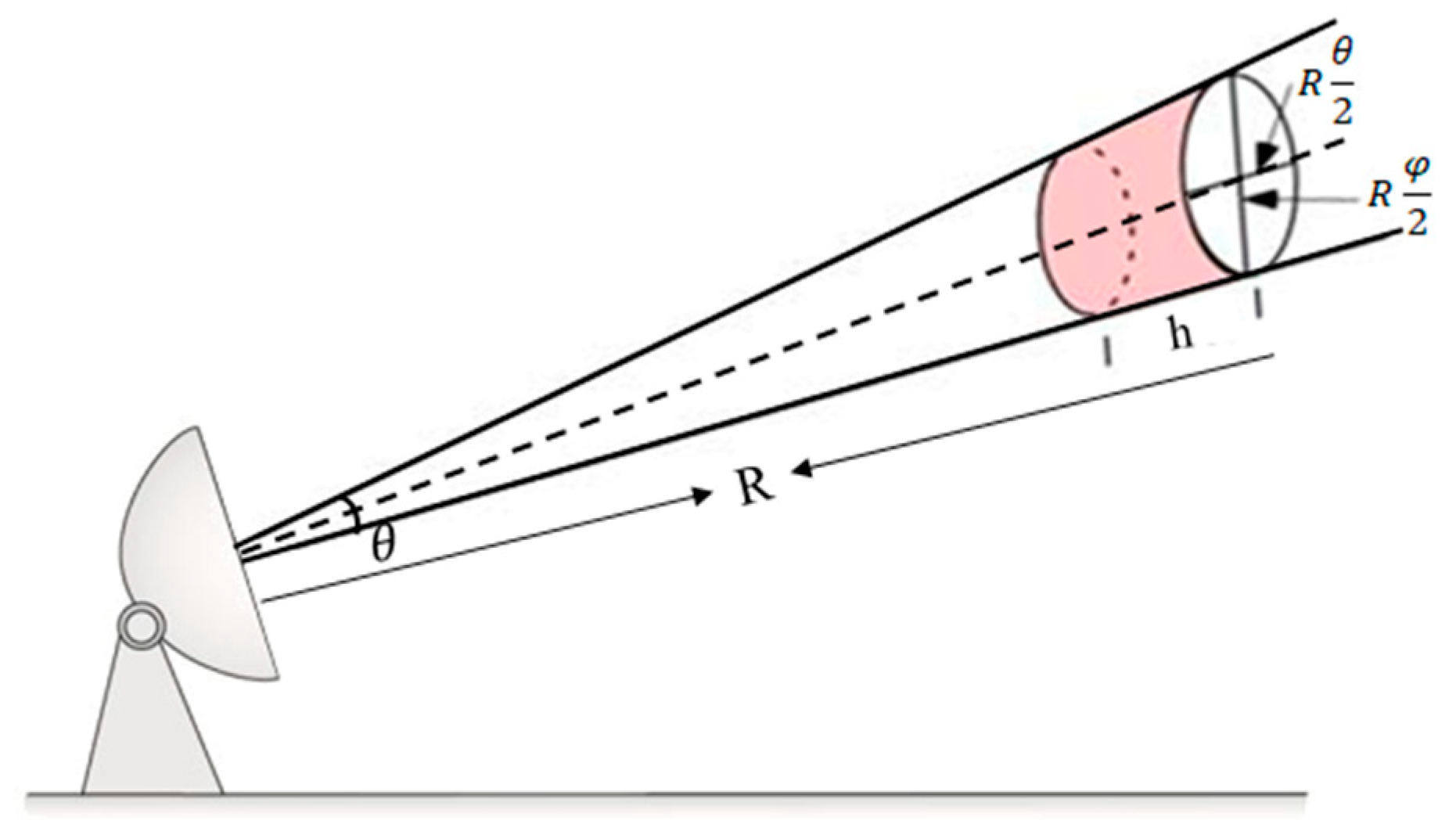
- Calculate Theoretical Observation Angles.
- 3.
- Synchronous Observation Experiment.
- 4.
- Accuracy Evaluation and System Correction.
2.2.1. Site Selection for Calibration
2.2.2. Calibration Parameter Calculation
- Calculate Far-Field Distance.
- 2.
- Determining the Length of the Suspension Rope.
- 3.
- Determining Flight Route and Altitude.
2.2.3. Synchronous Observation Experiment
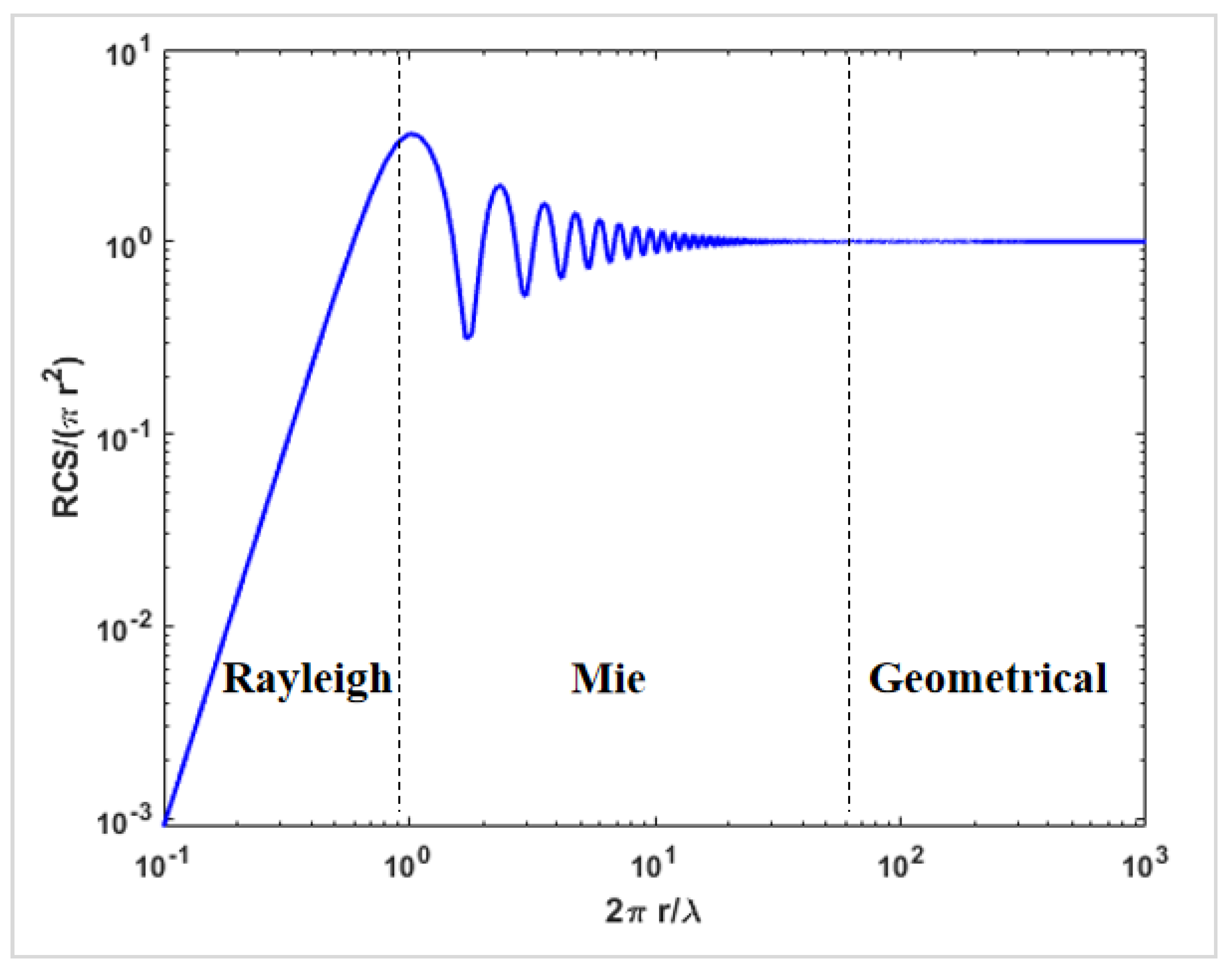
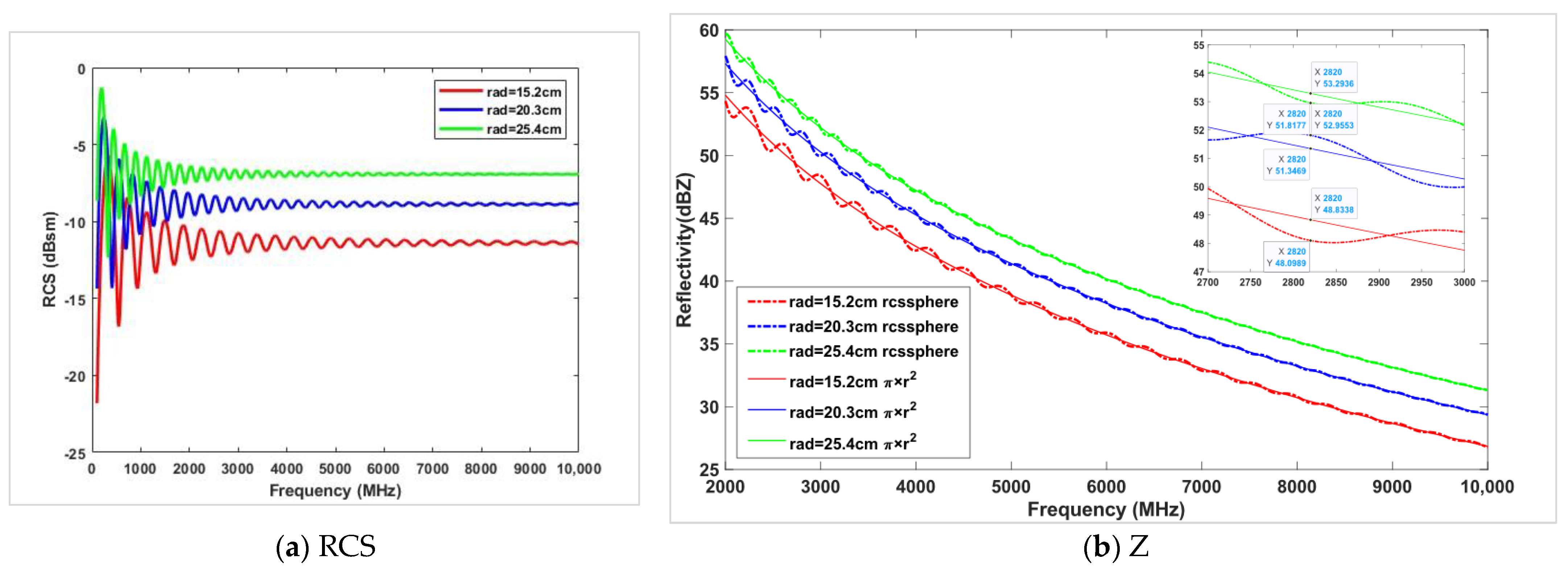
- Metal Sphere RCS Calculation.
- 2.
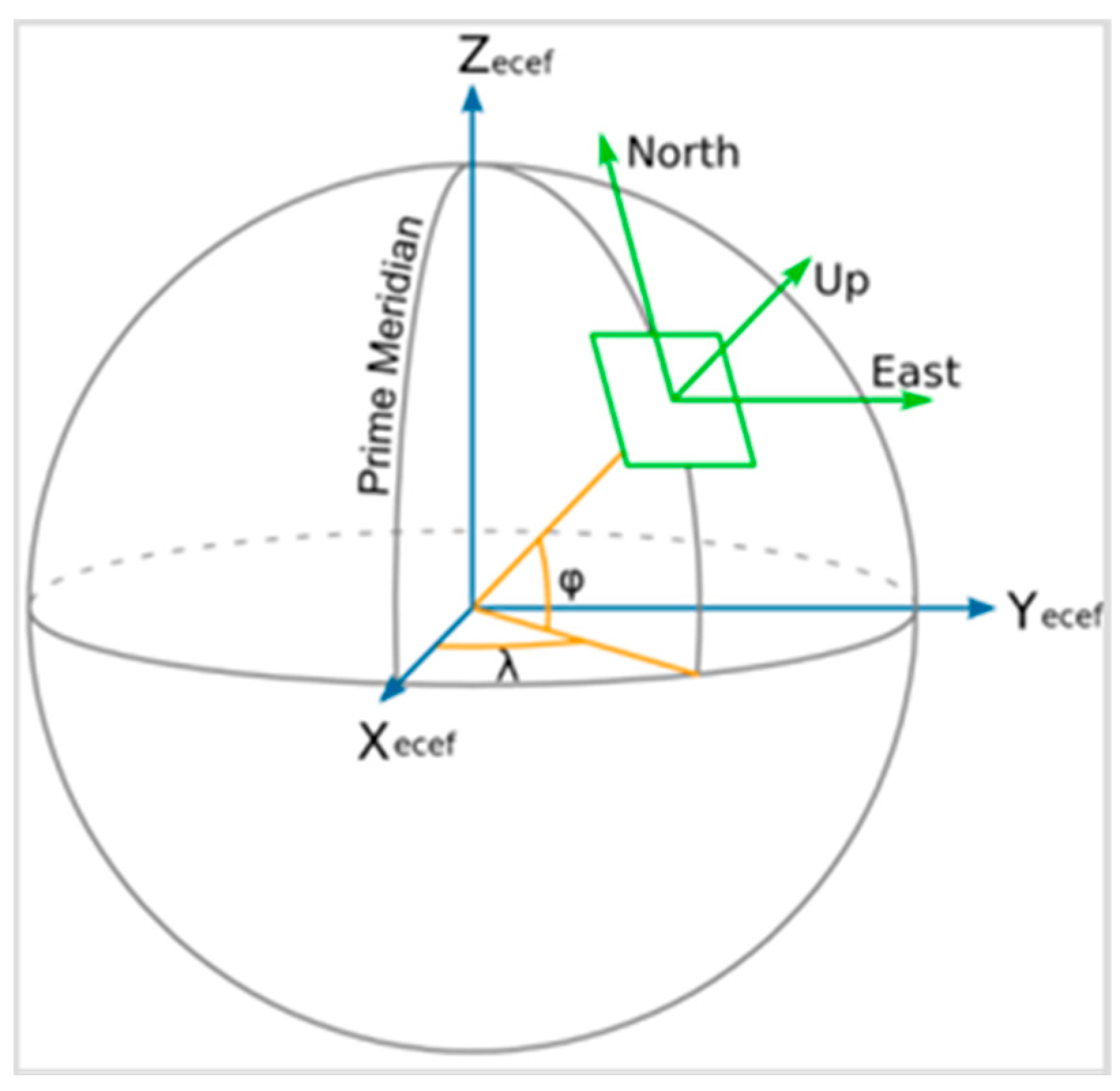
- Calculating Relative Position.
- 3.
- Metal Sphere Target Acquisition.
2.2.4. Accuracy Evaluation
3. Experimental Area and Data Source
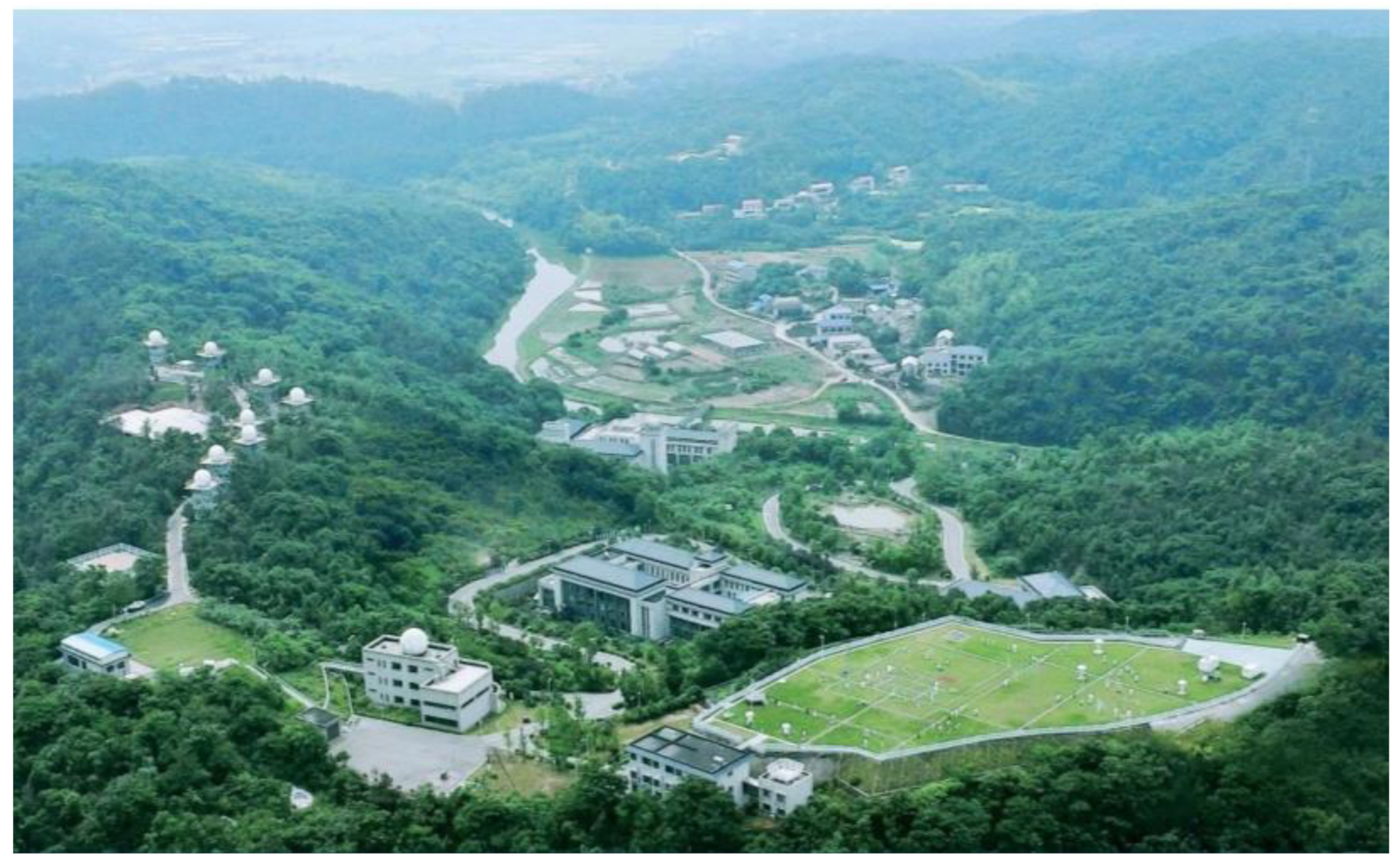
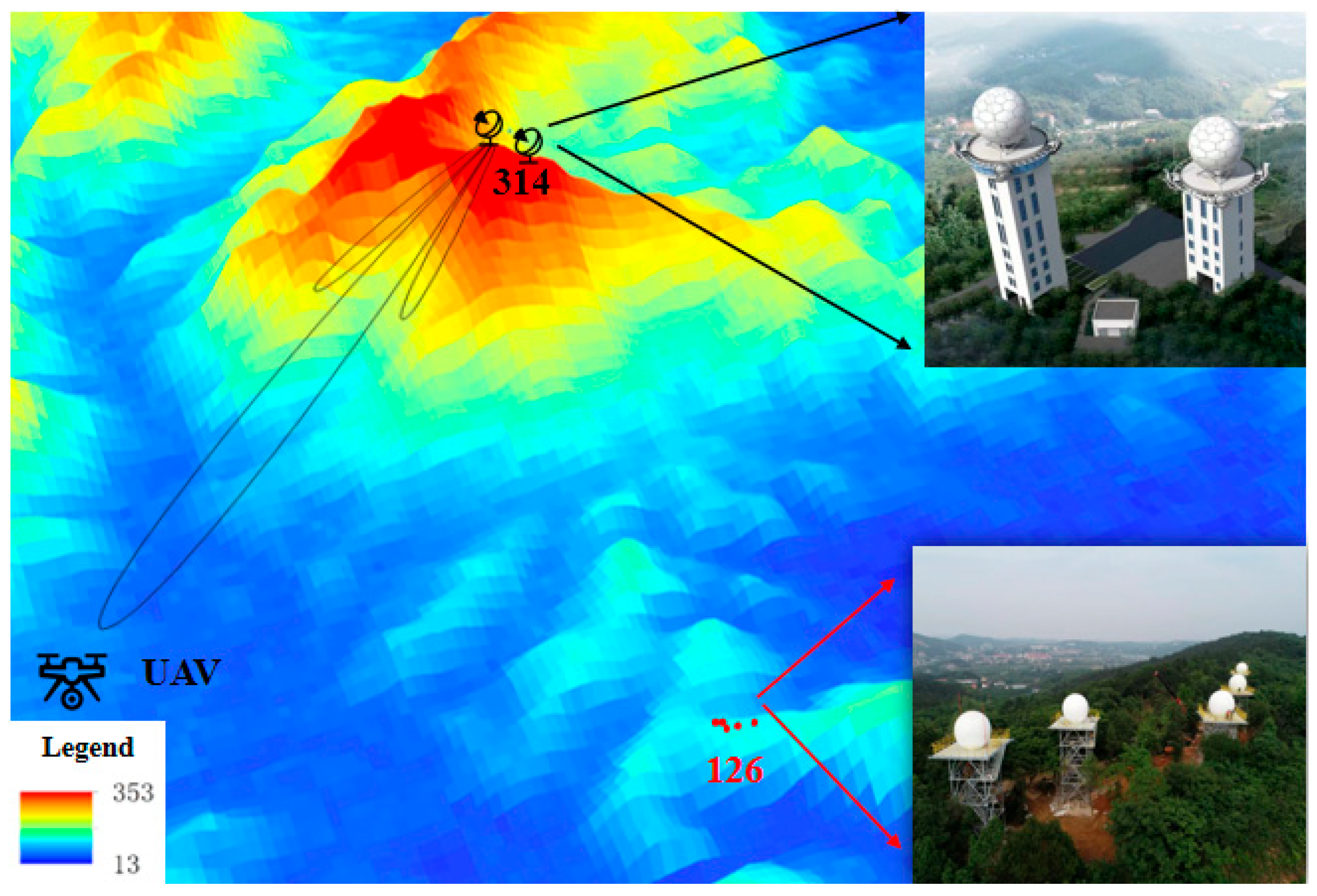
3.1. Introduction to the Experimental Area
3.2. Radar Parameters
3.3. UAV, Laser Rangefinder, and Metal Sphere Parameters
4. Results
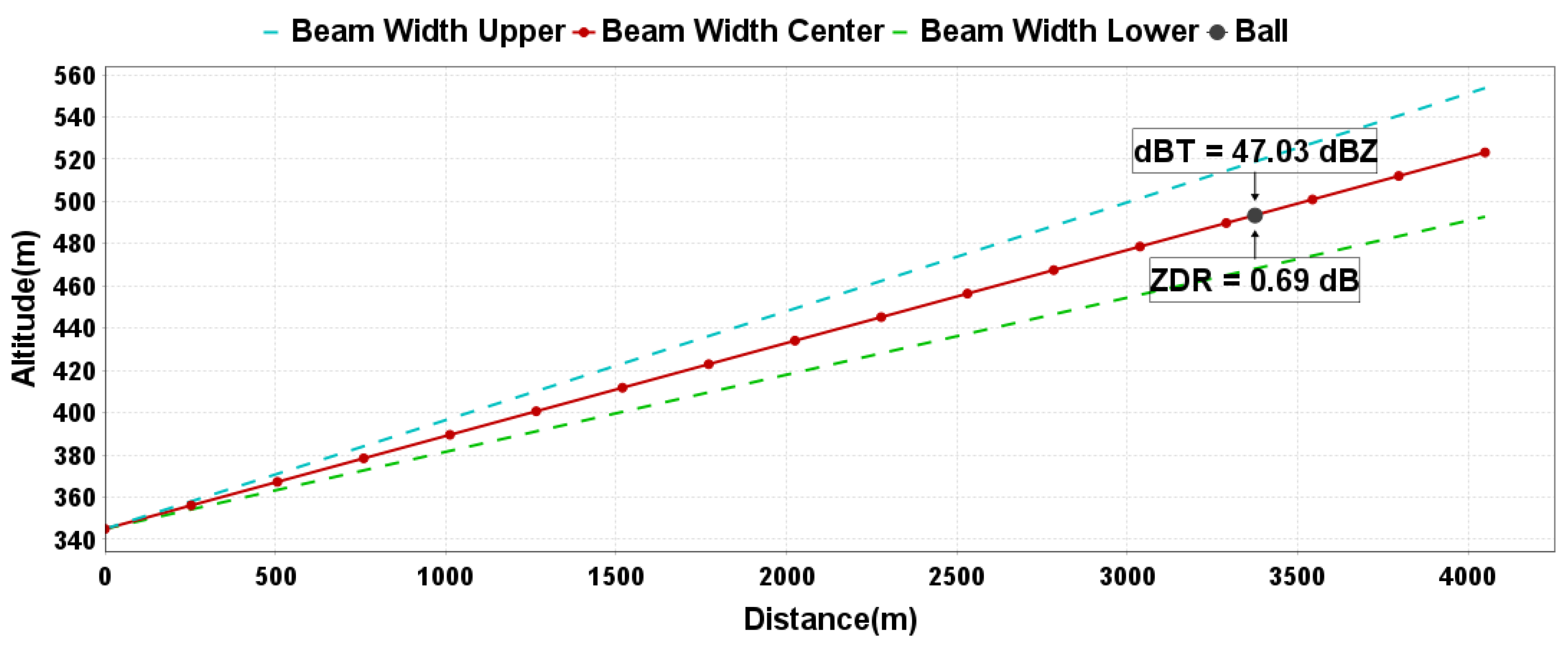
4.1. An Analysis of the Metal Sphere Position
4.2. First Metal Sphere Calibration
4.3. Post-Calibration Data Authenticity Verification
4.3.1. The Second Metal Sphere Calibration
4.3.2. Cross-Validation of Radar at Same Site
4.3.3. Radar Key Parameter Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anagnostou, E.N.; Morales, C.A.; Dinku, T. The use of TRMM precipitation radar observations in determining ground radar calibration biases. J. Atmos. Ocean. Technol. 2001, 18, 616–628. [Google Scholar] [CrossRef]
- Schneebeli, M.; Leuenberger, A.; Frech, M.; Ventura, J.F. Weather radar data calibration and monitoring. Adv. Weather. Radar 2024, 2, 41–97. [Google Scholar]
- Yin, J.; Hoogeboom, P.; Unal, C.; Russchenberg, H.; Van Der Zwan, F.; Oudejans, E. UAV-aided weather radar calibration. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10362–10375. [Google Scholar] [CrossRef]
- Gabella, M.; Sartori, M.; Progin, O.; Germann, U. Acceptance tests and monitoring of the next generation polarimetric weather radar network in Switzerland. In Proceedings of the 2013 International Conference on Electromagnetics in Advanced Applications (ICEAA), Torino, Italy, 9–13 September 2013; pp. 591–594. [Google Scholar]
- Kumar, M.; Kelly, P.K. Non-Linear Signal Processing methods for UAV detections from a Multi-function X-band Radar. Drones 2023, 7, 251. [Google Scholar] [CrossRef]
- Schneebeli, M.; Leuenberger, A.; Gehring, J.; Lee, G.; Ahn, K.D.; Tapiador, F.; Berne, A. Absolute Calibration and Propagation Effect Assessment with a Target Simulator. Available online: https://palindrome-rs.ch/wp-content/uploads/2023/07/2018_ERAD_poster_schneebeli_V0.4.pdf (accessed on 19 May 2024).
- Williams, E.; Hood, K.; Cho, J.; Smalley, D.; Sandifer, J.; Zrnic, D.; Melnikov, V.; Burgess, D.; Forsyth, D.; Webster, T. End-to-end calibration of NEXRAD differential reflectivity with metal spheres. In Proceedings of the 36th Conference on Radar Meteorology, Breckenridge, CO, USA, 6–20 September 2013. [Google Scholar]
- Sun, B.; Wei, J.; Weng, Y.; Qiu, J.; Zhou, T.; Cao, J.; Qiao, Z. Calibration of Weather Radar Using UAV Platform. Mod. Radar 2021, 43, 33–40. [Google Scholar]
- Zhu, Y.; Zhou, H.; Zhao, Y.; Liu, J.; Du, Y.; Chu, C.; Wang, X. Metal Sphere Calibration for ZDR Parameters of CINRA/SA-D Radar. Meteorol. Sci. Technol. 2021, 49, 517–523+534. [Google Scholar]
- Li, Z.; Chen, H.; Bi, Y. Calibration For X-Band Solid-State Weather Radar with Metal Sphere. Remote Sens. Technol. Appl. 2018, 33, 259–266. [Google Scholar]
- Duthoit, S.; Salazar, J.L.; Doyle, W.; Segales, A.; Wolf, B.; Fulton, C.; Chilson, P. A new approach for in-situ antenna characterization, radome inspection and radar calibration, using an unmanned aircraft system (UAS). In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle DC, USA, 8–12 May 2017; pp. 669–674. [Google Scholar]
- Knorr, J.B. Weather radar equation correction for frequency agile and phased array radars. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1220–1227. [Google Scholar] [CrossRef]
- Joshil, S.S.; Chandrasekar, C.V. Calibration of d3r weather radar using uav-hosted target. Remote Sens. 2022, 14, 3534. [Google Scholar] [CrossRef]
- Suh, J.-S.; Minz, L.; Jung, D.-H.; Kang, H.-S.; Ham, J.-W.; Park, S.-O. Drone-based external calibration of a fully synchronized ku-band heterodyne FMCW radar. IEEE Trans. Instrum. Meas. 2017, 66, 2189–2197. [Google Scholar] [CrossRef]
- Paonessa, F.; Virone, G.; Sarri, A.; Dell’Omodarme, K.; Fiori, L.; Addamo, G.; Matteoli, S.; Peverini, O.A. UAV-mounted corner reflector for in-situ radar verification and calibration. In Proceedings of the 2018 IEEE Conference on Antenna Measurements & Applications (CAMA), Vasteras, Sweden, 3–6 September 2018; pp. 1–4. [Google Scholar]
- Probert-Jones, J. The radar equation in meteorology. Q. J. R. Meteorol. Soc. 1962, 88, 485–495. [Google Scholar] [CrossRef]
- Zhang, P.; Du, B.; Dai, T. Radar Meteorology; Meteorological Press: Beijing, China, 2001. [Google Scholar]
- Han, X. Related Algorithms and Technologies of Near-Field to Far-Field Transformation on Antennas. Master’s Thesis, University of Science and Technology of China, Hefei, China, 2016. [Google Scholar]
- Huang, P.; Yin, H.; Xu, X.; Bai, Y. Radar Target Characteristics; Publishing House of Electronics Industry: Beijing, China, 2005. [Google Scholar]
- Sevgi, L.; Rafiq, Z.; Majid, I. Radar cross section (RCS) measurements [Testing ourselves]. IEEE Antennas Propag. Mag. 2013, 55, 277–291. [Google Scholar] [CrossRef]
- Chen, Y.; Li, L.; Ye, F.; Kang, B.; Wang, X.; Bu, Z.; Zhu, M.; Yang, Q.; Shao, N.; Zhang, J. An RTK UAV-Based Method for Radial Velocity Validation of Weather Radar. Remote Sens. 2024, 16, 1153. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Band | λ/cm | D/m | L/m |
|---|---|---|---|
| S-Band (2.85 GHz) | 10.5 | 8.4 | 1344 |
| C-Band (5.5 GHz) | 5.45 | 4.5 | 743 |
| X-Band (9.45 GHz) | 3.2 | 2.4 | 360 |
| Band | L/m | R/m | L2/m |
|---|---|---|---|
| S | 1344 | 3000 | 157 |
| C | 743 | 2000 | 105 |
| X | 360 | 1000 | 53 |
| Radius/cm | Difference/dB | ||
|---|---|---|---|
| S-Band | C-Band | X-Band | |
| 15.2 | 0.73 | 0.26 | 0.10 |
| 20.3 | 0.47 | 0.16 | 0.05 |
| 25.4 | 0.34 | 0.10 | 0.03 |
| Product | Radar Technical Specifications | Accuracy Specifications for Metal Sphere Calibration |
|---|---|---|
| Z | ±1 dB | ±0.5 dB |
| ZDR | ±0.2 dB | ±0.2 dB |
| CC | ≤0.01 | ≤0.01 |
| Parameter Name | Reference Radar SSR | Calibrated Radar BC1 |
|---|---|---|
| Scan Mode | RHI, PPI, FIX | |
| Pulse Accumulation | 64 | 64 |
| Operating Wavelength (cm) | 10.54 | 5.31 |
| Pulse Repetition Frequency (Hz) | 1024 | 1024 |
| Pulse Width (μs) | 1.57 | 1.0 |
| Horizontal Beamwidth (°) | 0.91 | 0.48 |
| Vertical Beamwidth (°) | 0.86 | 0.43 |
| Pulse Duration (m) | 250 | 150 |
| Calibration Equipment | Photo | Performance Indicators | Parameters |
|---|---|---|---|
| Matrice 300 RTK UAV (Made by DJI, Shenzhen, China) |  | Operating frequency | 2.4000–2.4835 GHz |
| Maximum endurance | 55 min | ||
| Maximum horizontal flight speed | 17 m/s | ||
| Maximum altitude | 5000 m | ||
| Maximum wind resistance | 15 m/s (Wind force scale 7) | ||
| RTK positioning accuracy | The maximum tolerable wind speed during takeoff and landing is 12 m/s. | ||
| GNSS | 1 cm + 1 ppm (Horizontal) | ||
| H20 Laser Rangefinder Camera (Made by DJI, Shenzhen, China) |  | Wavelength | 905 nm |
| Accuracy of laser rangefinder | ±(0.2 m + D × 0.15%), where D represents the distance to the vertical reflecting surface | ||
| Measurement range | 3–1200 m | ||
| Metal Sphere (Made by CENTURY METAL SPINNING, Illinois, USA) |  | Radius | 25.4 cm |
| Weight | 2.5 kg | ||
| Roundness | 99.88% |
| Parameters | Radar BC1 | Radar SSR |
|---|---|---|
| λ (cm) | 5.31 | 10.54 |
| θ (°) | 0.54 | 0.91 |
| Φ (°) | 0.51 | 0.86 |
| τ (μs) | 1 | 1.57 |
| R (m) | 2925.10 | 2904.35 |
| r (cm) | 25.40 | 25.40 |
| Theoretical value (dBz) | 49.67 | 55.15 |
| Observed value (dBz) | 46.45 | 55.12 |
| Difference (dB) | −3.22 | −0.03 |
| Equipment | Parameters | Value |
|---|---|---|
| Radar BC1 | λ (cm) | 5.31 |
| θ (°) | 0.48 | |
| Φ (°) | 0.43 | |
| τ (μs) | 1 | |
| R (m) | 3231.31 | |
| Metal Sphere | r (cm) | 25.40 |
| L2 (m) | 112 | |
| UAV | h3 (m) | 119 |
| h2 (m) | 483 |
| Product | Z (dBZ) | ZDR (dB) | CC | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Observed Value | RHI | PPI | FIX | RHI | PPI | FIX | RHI | PPI | FIX |
| 49.66 | 50.10 | 50.65 | 0.06 | −0.13 | −0.11 | 1 | 1 | 1 | |
| Theoretical Value | 50.06 | 0 | 1 | ||||||
| Difference | −0.40 | 0.04 | 0.59 | 0.06 | −0.13 | −0.11 | 0 | 0 | 0 |
| Average Deviation | 0.08 | −0.06 | 0 | ||||||
| Comparison Count | Time of Comparison | Sample Size (Items) | Mean Deviation (dB) | Standard Deviation (dB) | Correlation Coefficient |
|---|---|---|---|---|---|
| 1 | 20240121133000 | 15,352 | 0.62 | 2.11 | 0.88 |
| 2 | 20240121133601 | 25,482 | 0.55 | 2.04 | 0.86 |
| 3 | 20240121134201 | 18,862 | 0.35 | 2.04 | 0.86 |
| 4 | 20240121134801 | 17,559 | 0.31 | 1.96 | 0.87 |
| 5 | 20240121135401 | 22,524 | 0.39 | 1.97 | 0.86 |
| 6 | 20240121140000 | 11,357 | 0.31 | 2.03 | 0.88 |
| 7 | 20240121140600 | 3306 | 0.18 | 2.57 | 0.75 |
| 8 | 20240121141200 | 5742 | 0.02 | 2.3 | 0.72 |
| 9 | 20240121141800 | 14,729 | 0.16 | 2.41 | 0.87 |
| 10 | 20240121142400 | 19,003 | 0.33 | 2.26 | 0.9 |
| Mean Deviation | 15,391.6 | 0.32 | 2.17 | 0.85 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, F.; Wang, X.; Li, L.; Chen, Y.; Lei, Y.; Yu, H.; Yin, J.; Shi, L.; Yang, Q.; Huang, Z. Weather Radar Calibration Method Based on UAV-Suspended Metal Sphere. Sensors 2024, 24, 4611. https://doi.org/10.3390/s24144611
Ye F, Wang X, Li L, Chen Y, Lei Y, Yu H, Yin J, Shi L, Yang Q, Huang Z. Weather Radar Calibration Method Based on UAV-Suspended Metal Sphere. Sensors. 2024; 24(14):4611. https://doi.org/10.3390/s24144611
Chicago/Turabian StyleYe, Fei, Xiaopeng Wang, Lu Li, Yubao Chen, Yongheng Lei, Haifeng Yu, Jiazhi Yin, Lixia Shi, Qian Yang, and Zehao Huang. 2024. "Weather Radar Calibration Method Based on UAV-Suspended Metal Sphere" Sensors 24, no. 14: 4611. https://doi.org/10.3390/s24144611