
Robust Attitude Estimation for Low-Dynamic Vehicles Based on MEMS-IMU and External Acceleration Compensation

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
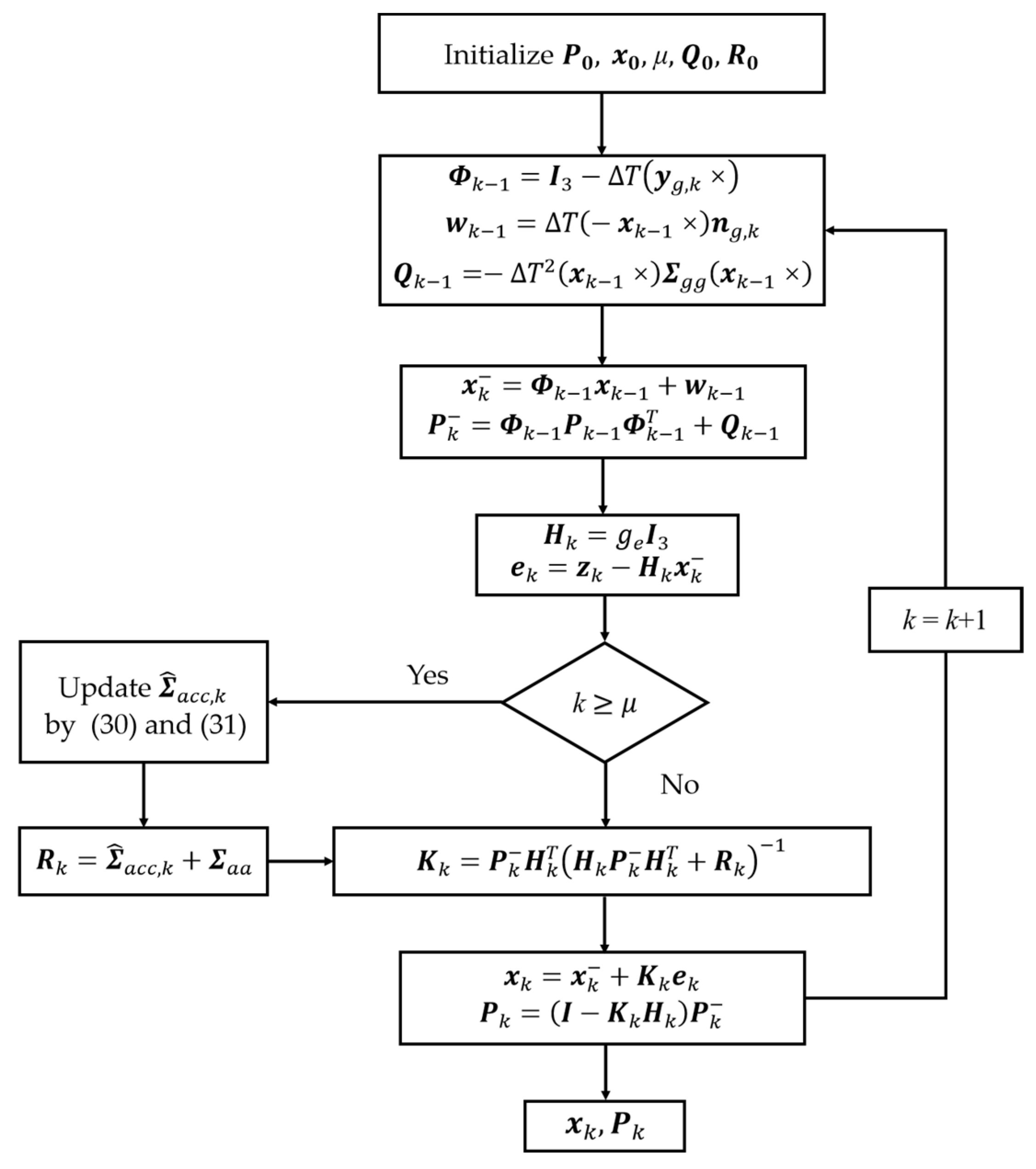
2.1. KF Algorithm
2.2. IMU Attitude Estimation
2.2.1. Principle of Attitude Calculation
2.2.2. Filtering Model Construction
2.3. Robust Attitude Estimation Method
3. Results
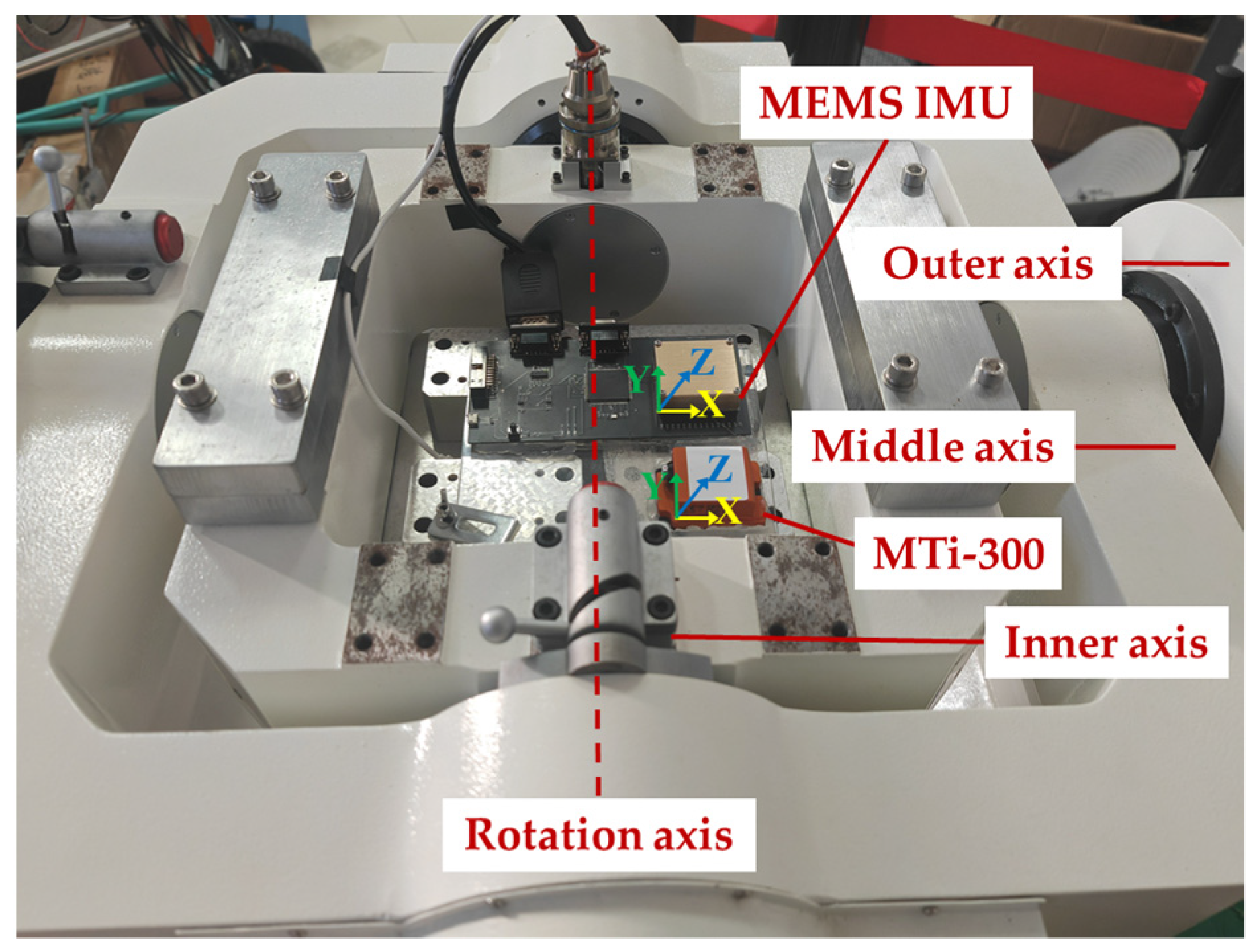
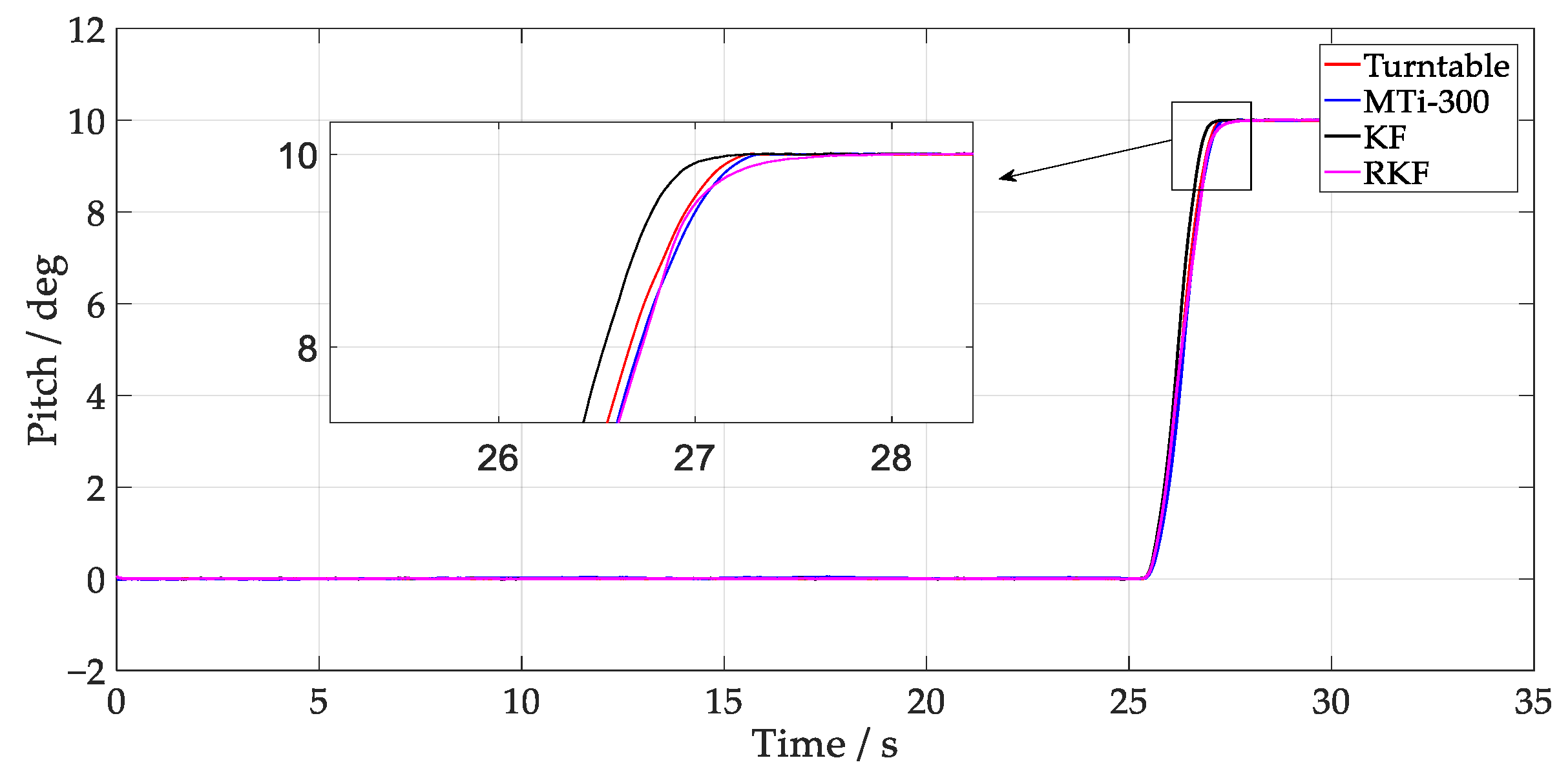
3.1. Turntable Angle Tracking Test
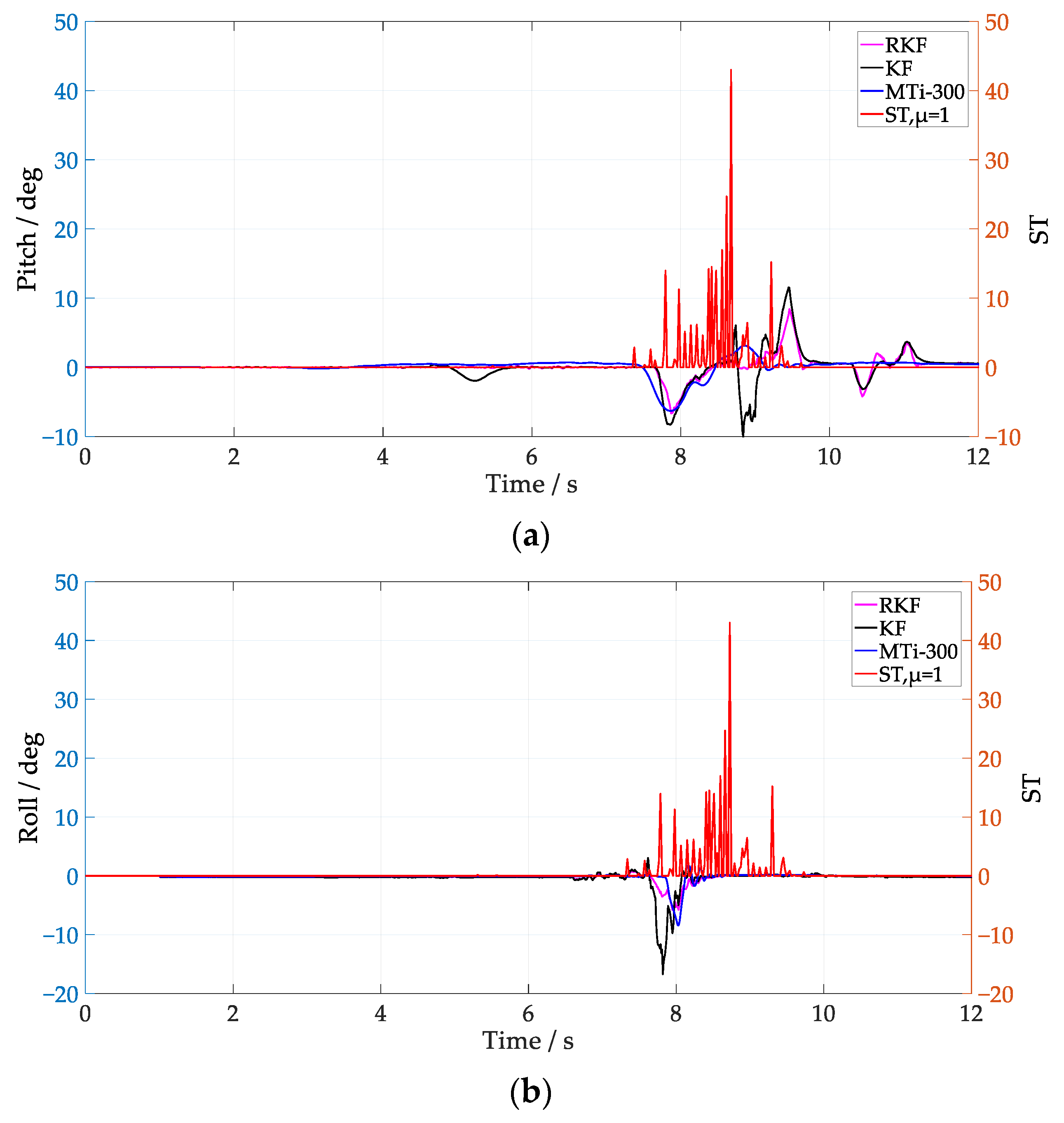
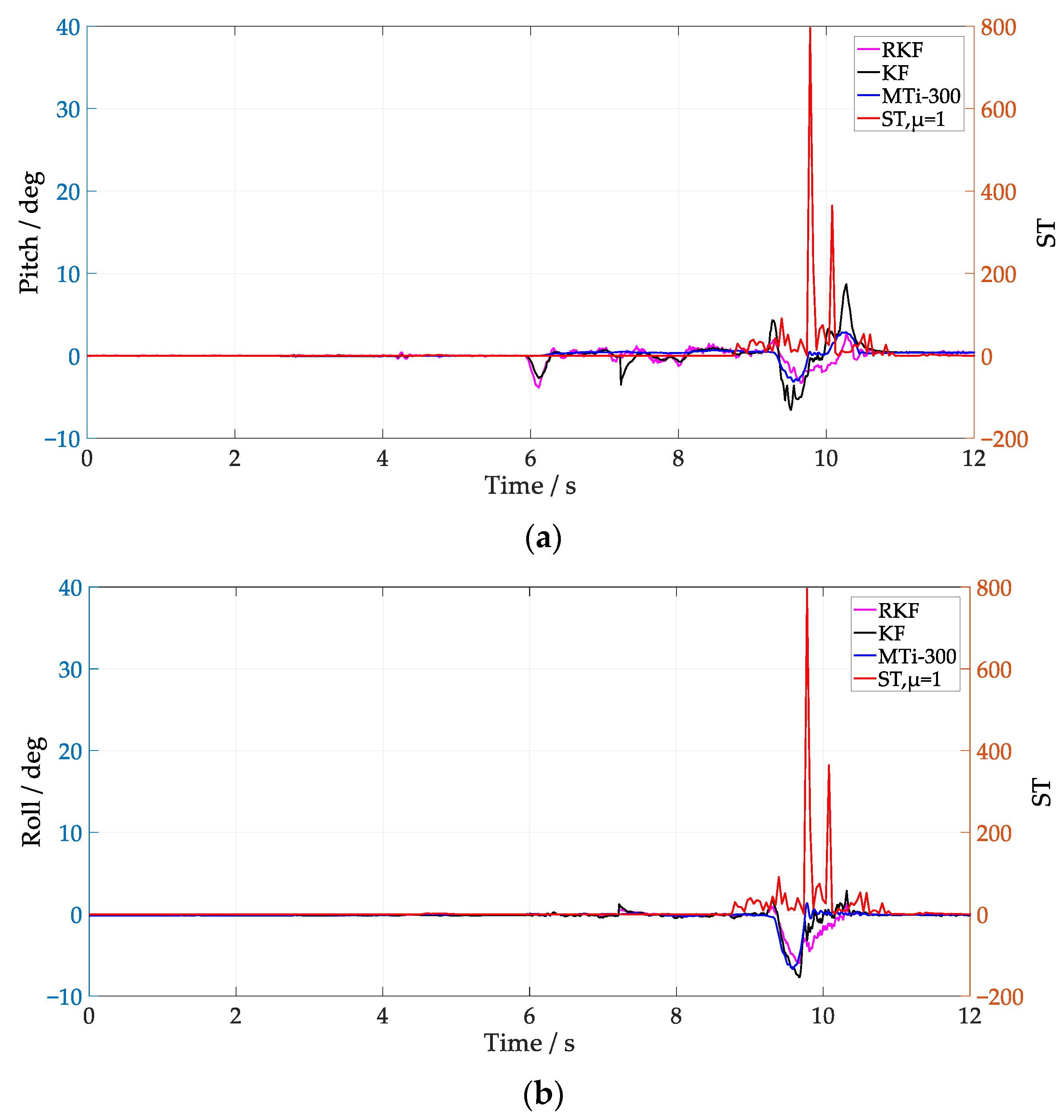
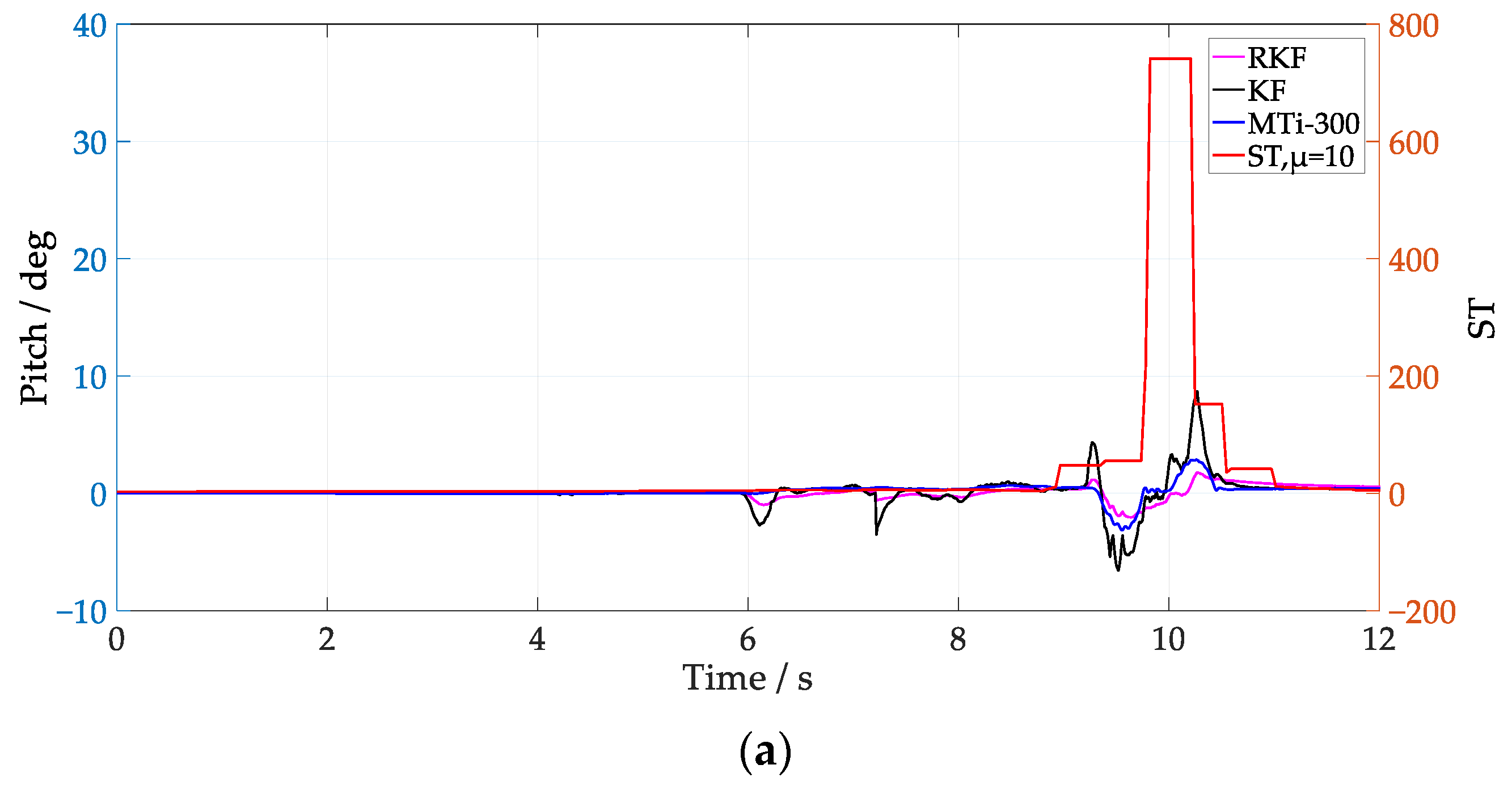
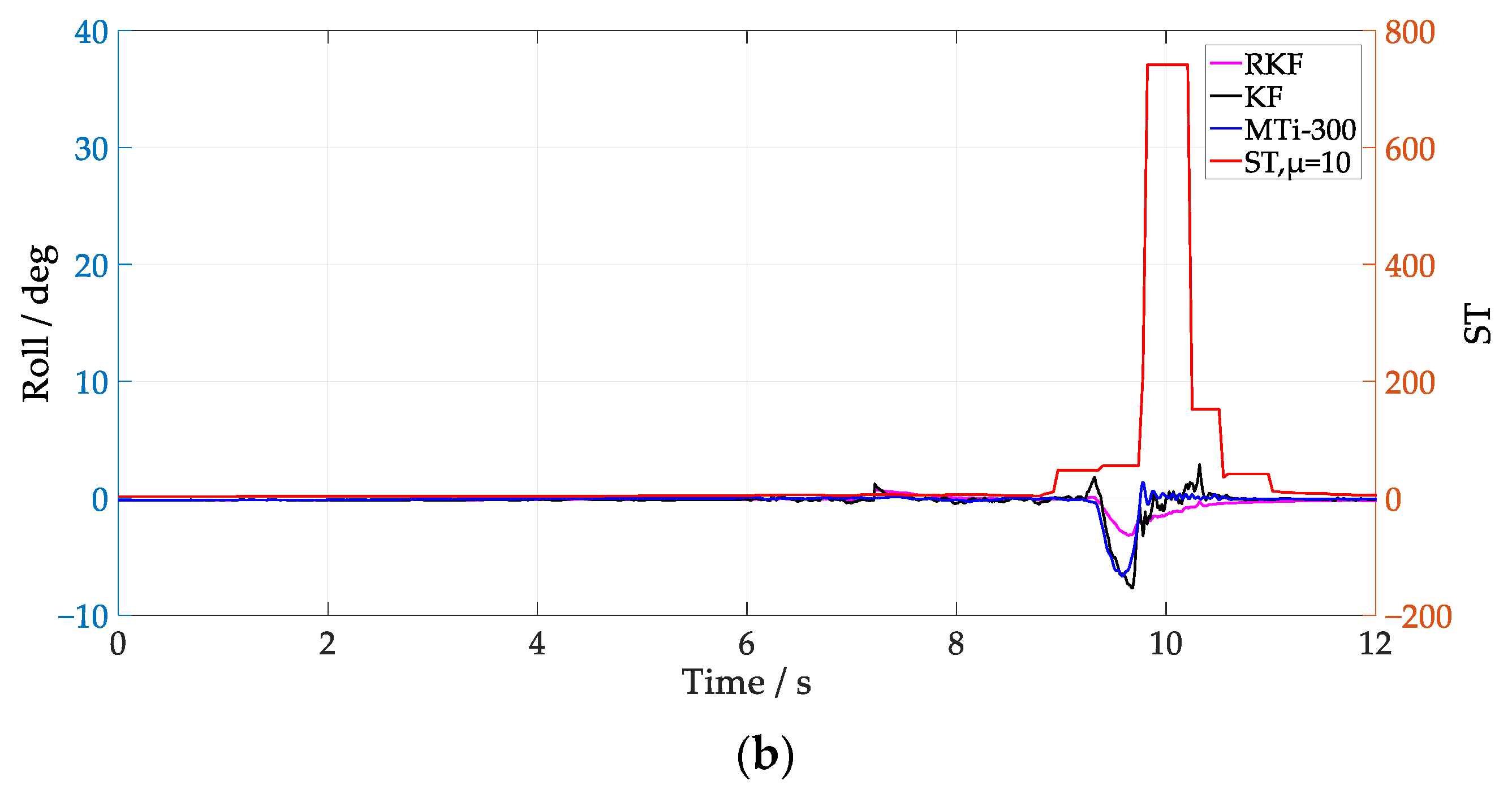
3.2. Dynamic Attitude Estimation Test
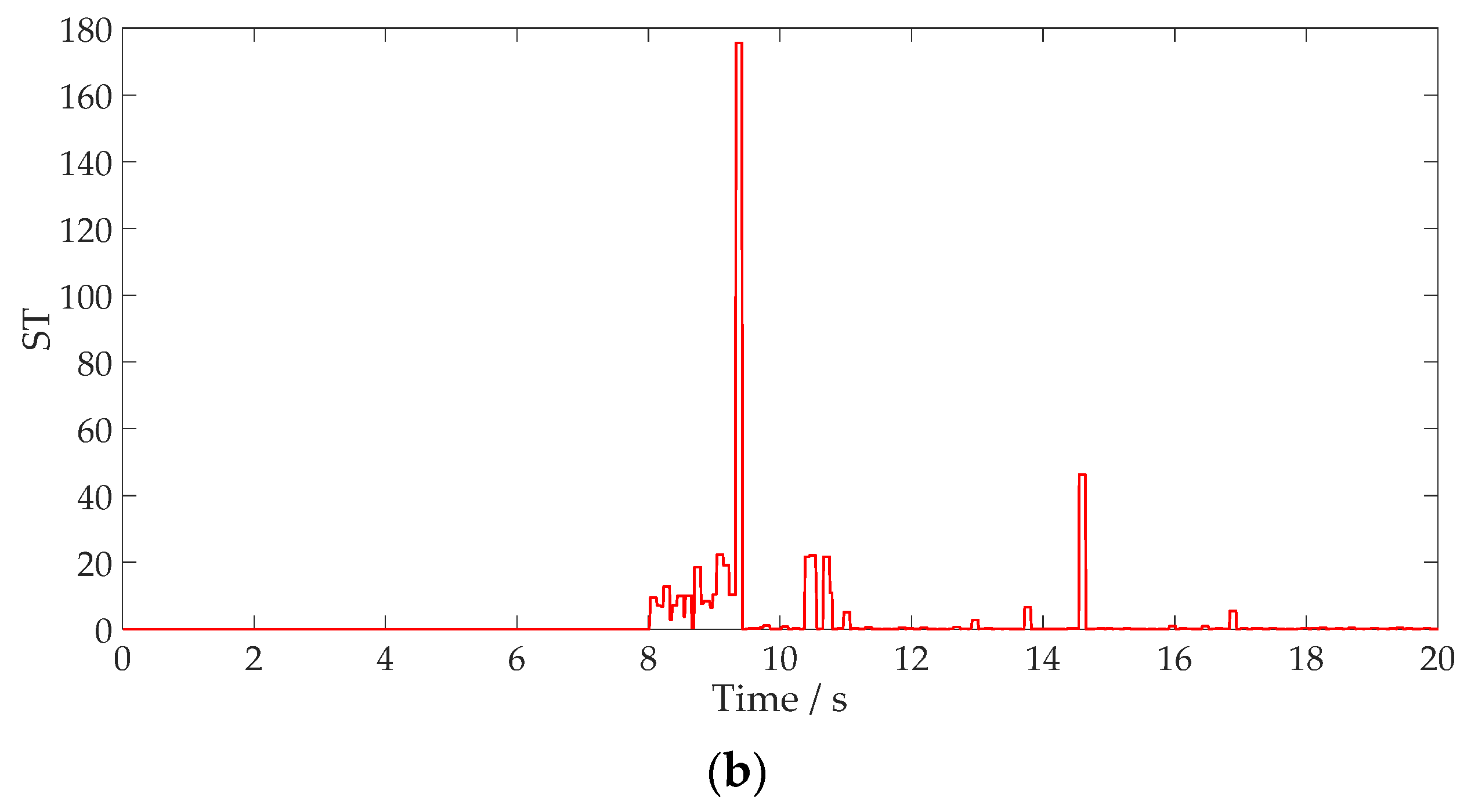
3.3. Plough Attitude Estimation Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, C. Non-initial attitude error analysis of SINS by error closed-loop and energy-level constructing. Aerosp. Sci. Technol. 2020, 106, 106149. [Google Scholar] [CrossRef]
- Xia, J.; Li, D.; Liu, G.; Cheng, J.; Zheng, K.; Luo, C. Design and Test of Electro-hydraulic Monitoring Device for Hitch Tillage Depth Based on Measurement of Tractor Pitch Angle. Trans. Chin. Soc. Agric. Mach. 2021, 52, 386–395. [Google Scholar]
- Zhang, Q.; Hu, Y.; Li, S.; Zhang, T.; Niu, X. Mounting Parameter Estimation from Velocity Vector Observations for Land Vehicle Navigation. IEEE Trans. Ind. Electron. 2022, 69, 4234–4244. [Google Scholar] [CrossRef]
- Jwu-Sheng, H.; Kuan-Chun, S. A Robust Orientation Estimation Algorithm Using MARG Sensors. IEEE Trans. Instrum. Meas. 2015, 64, 815–822. [Google Scholar] [CrossRef]
- Zhang, X.; He, J.; Hua, X.; Chen, Z.; Feng, Z.; Taciroglu, E. Simultaneous Identification of Time-Varying Parameters and External Loads Based on Extended Kalman Filter: Approach and Validation. Struct. Control Health Monit. 2023, 2023, 8379183. [Google Scholar] [CrossRef]
- Shaaban, G.; Fourati, H.; Kibangou, A.; Prieur, C. MARG Sensor-Based Attitude Estimation on SO3 Under Unknown External Acceleration. IEEE Control Syst. Lett. 2023, 7, 3795–3800. [Google Scholar] [CrossRef]
- Chang, J.; Cieslak, J.; Davila, J.; Zhou, J.; Zolghadri, A.; Guo, Z. A Two-Step Approach for an Enhanced Quadrotor Attitude Estimation via IMU Data. IEEE Trans. Control Syst. Technol. 2018, 26, 1140–1148. [Google Scholar] [CrossRef]
- Lee, J.K.; Park, E.J.; Robinovitch, S.N. Estimation of Attitude and External Acceleration Using Inertial Sensor Measurement During Various Dynamic Conditions. IEEE Trans. Instrum. Meas. 2012, 61, 2262–2273. [Google Scholar] [CrossRef] [PubMed]
- Mahony, R.; Hamel, T.; Pflimlin, J.-M. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Automat. Contr. 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, A. Estimation of IMU and MARG orientation using a gradient descent algorithm. IEEE Int. Conf. Rehabil. Robot. 2011, 2011, 5975346. [Google Scholar] [CrossRef]
- Wilson, S.; Eberle, H.; Hayashi, Y.; Madgwick, S.O.H.; McGregor, A.; Jing, X.; Vaidyanathan, R. Formulation of a new gradient descent MARG orientation algorithm: Case study on robot teleoperation. Mech. Syst. Signal Process 2019, 130, 183–200. [Google Scholar] [CrossRef]
- Farahan, S.B.; Machado, J.J.M.; de Almeida, F.G.; Tavares, J. 9-DOF IMU-Based Attitude and Heading Estimation Using an Extended Kalman Filter with Bias Consideration. Sensors 2022, 22, 3416. [Google Scholar] [CrossRef] [PubMed]
- Rong, H.; Peng, C.; Chen, Y.; Lv, J.; Zou, L. An EKF-Based Attitude Estimator for Eliminating the Effect of Magnetometer Measurements on Pitch and Roll Angles. IEEE Trans. Instrum. Meas. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Akbari, A.; Rahemi, F.; Khosrowjerdi, M.J.; Ebadollahi, S. Roll and Pitch Estimation from IMU Data Using an LPV H∞Filter. IEEE Trans. Instrum. Meas. 2023, 72, 3301864. [Google Scholar] [CrossRef]
- Cui, B.; Wei, X.; Chen, X.; Wang, A. Improved high-degree cubature Kalman filter based on resampling-free sigma-point update framework and its application for inertial navigation system-based integrated navigation. Aerosp. Sci. Technol. 2021, 117, 106905. [Google Scholar] [CrossRef]
- Liu, J.; Liu, H.; Wang, J.; Gu, H. Coordinated Lateral Stability Control of Autonomous Vehicles Based on State Estimation and Path Tracking. Machines 2023, 11, 328. [Google Scholar] [CrossRef]
- Bian, Y.; Yang, Z.; Sun, X.; Wang, X. Speed Sensorless Control of a Bearingless Induction Motor Based on Modified Robust Kalman Filter. J. Electr. Eng. Technol. 2023, 19, 1179–1190. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, R.; Hou, S. Inter-vehicle distance estimation considering camera attitude angles based on monocular vision. Proc. IMechE Part. D-J. Automob. Eng. 2020, 235, 894–900. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, Y.; Wang, H.; Chen, L. Surrounding Objects Detection and Tracking for Autonomous Driving Using LiDAR and Radar Fusion. Chin. J. Mech. Eng. 2021, 34, 117. [Google Scholar] [CrossRef]
- Del Rosario, M.B.; Khamis, H.; Ngo, P.; Lovell, N.H.; Redmond, S.J. Computationally Efficient Adaptive Error-State Kalman Filter for Attitude Estimation. IEEE Sens. J. 2018, 18, 9332–9342. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, Z.; Yu, G.; Li, H.; Zhang, N. A novel adaptive Kalman filter for Euler-angle-based MEMS IMU/magnetometer attitude estimation. Meas. Sci. Technol. 2021, 32, 045104. [Google Scholar] [CrossRef]
- Zhu, C.; Cai, S.; Yang, Y.; Xu, W.; Shen, H.; Chu, H. A Combined Method for MEMS Gyroscope Error Compensation Using a Long Short-Term Memory Network and Kalman Filter in Random Vibration Environments. Sensors 2021, 21, 1181. [Google Scholar] [CrossRef] [PubMed]
- Gao, G.; Gao, B.; Gao, S.; Hu, G.; Zhong, Y. A hypothesis test-constrained robust Kalman filter for INS/GNSS integration with abnormal measurement. IEEE Trans. Vehi. Tech. 2023, 72, 1662–1673. [Google Scholar] [CrossRef]
- Jwo, D.; Chen, Y.; Cho, T.; Biswal, A. A robust GPS navigation filter based on maximum correntropy criterion with adaptive kernel bandwidth. Sensors 2023, 23, 9386. [Google Scholar] [CrossRef] [PubMed]
- Javed, M.A.; Tahir, M.; Ali, K. Cascaded Kalman Filtering-Based Attitude and Gyro Bias Estimation With Efficient Compensation of External Accelerations. IEEE Access 2020, 8, 50022–50035. [Google Scholar] [CrossRef]
- Odry, A.; Kecskes, I.; Sarcevic, P.; Vizvari, Z.; Toth, A.; Odry, P. A Novel Fuzzy-Adaptive Extended Kalman Filter for Real-Time Attitude Estimation of Mobile Robots. Sensors 2020, 20, 803. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Guo, Y.; Gong, L.; Liu, C. Harvesting Route Detection and Crop Height Estimation Methods for Lodged Farmland Based on AdaBoost. Agriculture 2023, 13, 1700. [Google Scholar] [CrossRef]
- He, J.; Luo, X.; Zhang, Z.; Wang, P.; He, J.; Yue, B.; Ding, F.; Zhu, Q. Positioning correction method for rice transplanters based on the attitude of the implement. Comput. Electron. Agric. 2020, 176, 105598. [Google Scholar] [CrossRef]
- Huang, P.; Zhang, Z.; Luo, X.; Liu, Z.; Wang, H.; Lin, Z.; Gao, W.J. Design and test of tilt angle measurement system for agricultural implements. Trans. Chin. Soc. Agric. Eng. 2017, 33, 9–16. [Google Scholar] [CrossRef]
- Yu, J.H.; Park, J.K.; Cheon, S.H.; Byeon, S.J.; Lee, J.W. Development of a rolling angle estimation algorithm to improve the performance of implement leveling-control systems for agricultural tractors. Adv. Mech. Eng. 2022, 14, 16878132221138310. [Google Scholar] [CrossRef]
- Yang, H.; Zhou, J.; Qi, Z. Prediction model of pitch angle of greenhouse electric tractors based on time series analysis. Dyna 2023, 98, 620–626. [Google Scholar] [CrossRef] [PubMed]
- Zhao, N.; Zhao, B.; Yi, S.; Zhou, Z.; Che, G. Research on a Sowing Depth Detection System Based on an Improved Adaptive Kalman Filtering Method. Electronics 2022, 11, 3802. [Google Scholar] [CrossRef]
- Candan, B.; Soken, H.E. Robust Attitude Estimation Using IMU-Only Measurements. IEEE Trans. Instrum. Meas. 2021, 70, 3104042. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Pitch RMSE (°) |
|---|---|
| KF | 0.148 |
| MTi-300 | 0.072 |
| RKF | 0.051 |
| Method | Average Speed (m/s) | Pitch RMSE (°) | Roll RMSE (°) |
|---|---|---|---|
| KF | 0.5 | 0.728 | 0.965 |
| 1.5 | 0.875 | 0.912 | |
| RKF | 0.5 | 0.313 | 0.243 |
| 1.5 | 0.460 | 0.495 |
| Methods | Pitch RMSE (°) |
|---|---|
| KF | 0.493 |
| RKF μ = 1 | 0.336 |
| RKF μ = 10 | 0.259 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Cui, B.; Wei, X.; Zhu, Y.; Sun, Z.; Liu, Y. Robust Attitude Estimation for Low-Dynamic Vehicles Based on MEMS-IMU and External Acceleration Compensation. Sensors 2024, 24, 4623. https://doi.org/10.3390/s24144623
Chen J, Cui B, Wei X, Zhu Y, Sun Z, Liu Y. Robust Attitude Estimation for Low-Dynamic Vehicles Based on MEMS-IMU and External Acceleration Compensation. Sensors. 2024; 24(14):4623. https://doi.org/10.3390/s24144623
Chicago/Turabian StyleChen, Jiaxuan, Bingbo Cui, Xinhua Wei, Yongyun Zhu, Zeyu Sun, and Yufei Liu. 2024. "Robust Attitude Estimation for Low-Dynamic Vehicles Based on MEMS-IMU and External Acceleration Compensation" Sensors 24, no. 14: 4623. https://doi.org/10.3390/s24144623