
Research on a Fault Feature Extraction Method for an Electric Multiple Unit Axle-Box Bearing Based on a Resonance-Based Sparse Signal Decomposition and Variational Mode Decomposition Method Based on the Sparrow Search Algorithm


Abstract
:1. Introduction
2. Background and Critical Theories
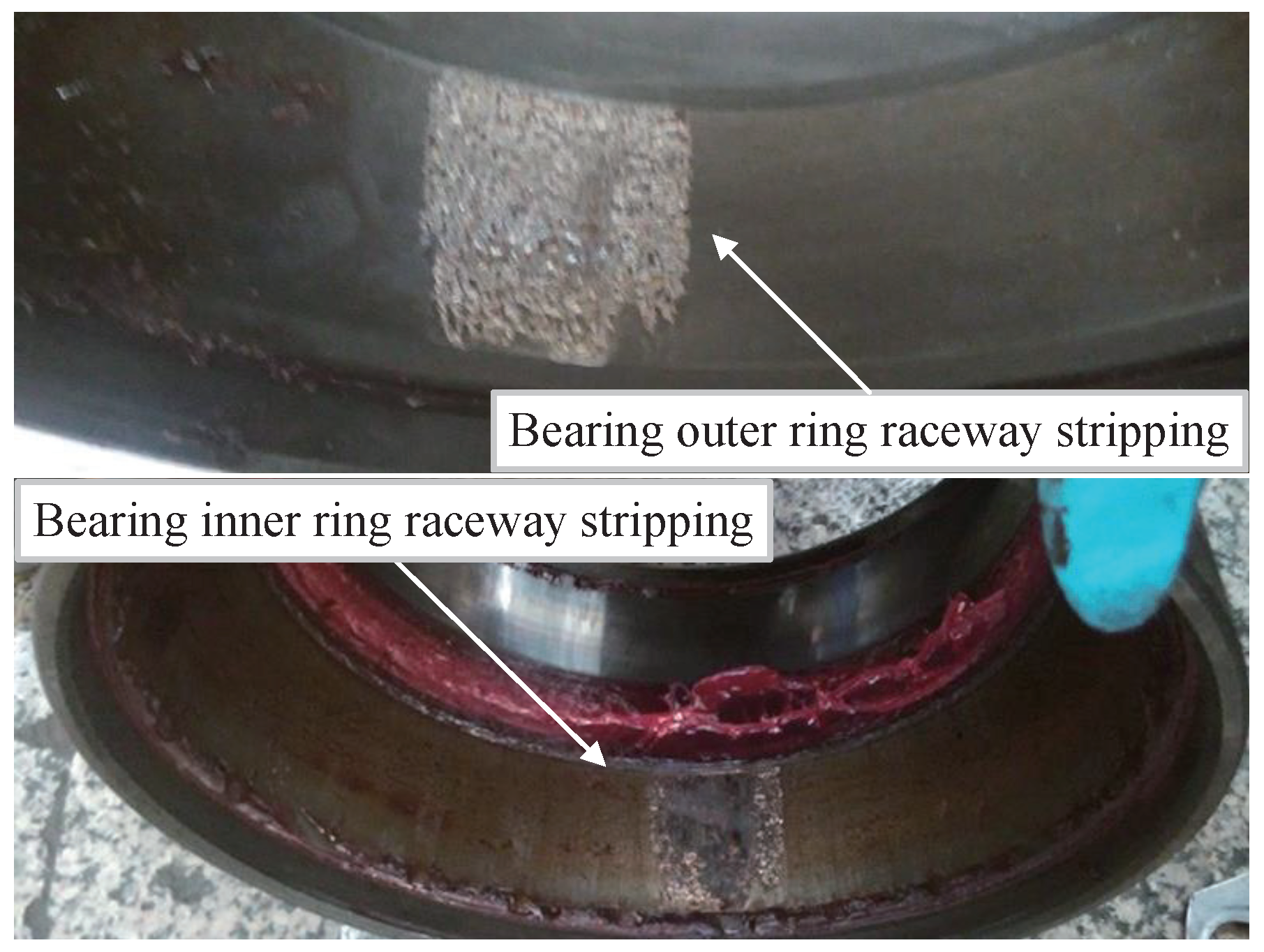
2.1. Problem Description of EMU Axle-Box Bearing Fault Diagnosis
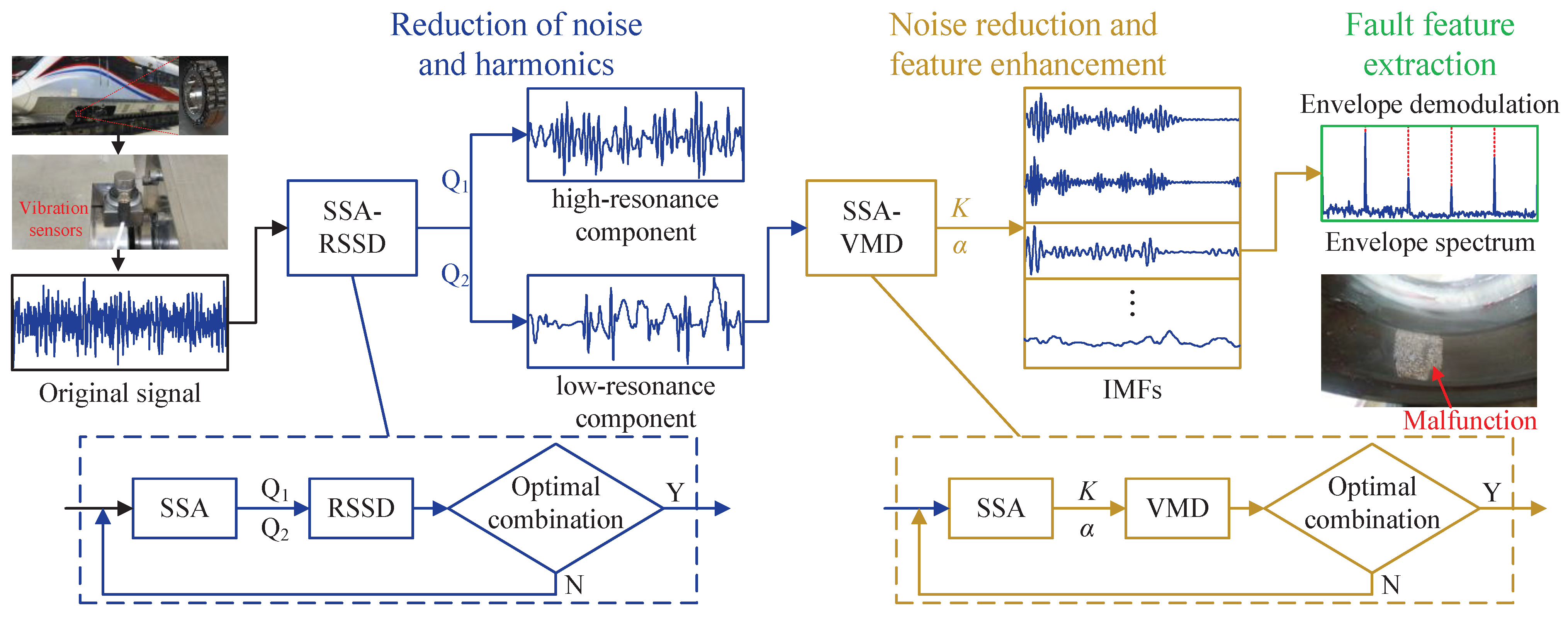
2.2. Basic Flow of the Proposed Method
2.3. Resonance-Based Sparse Signal Decomposition
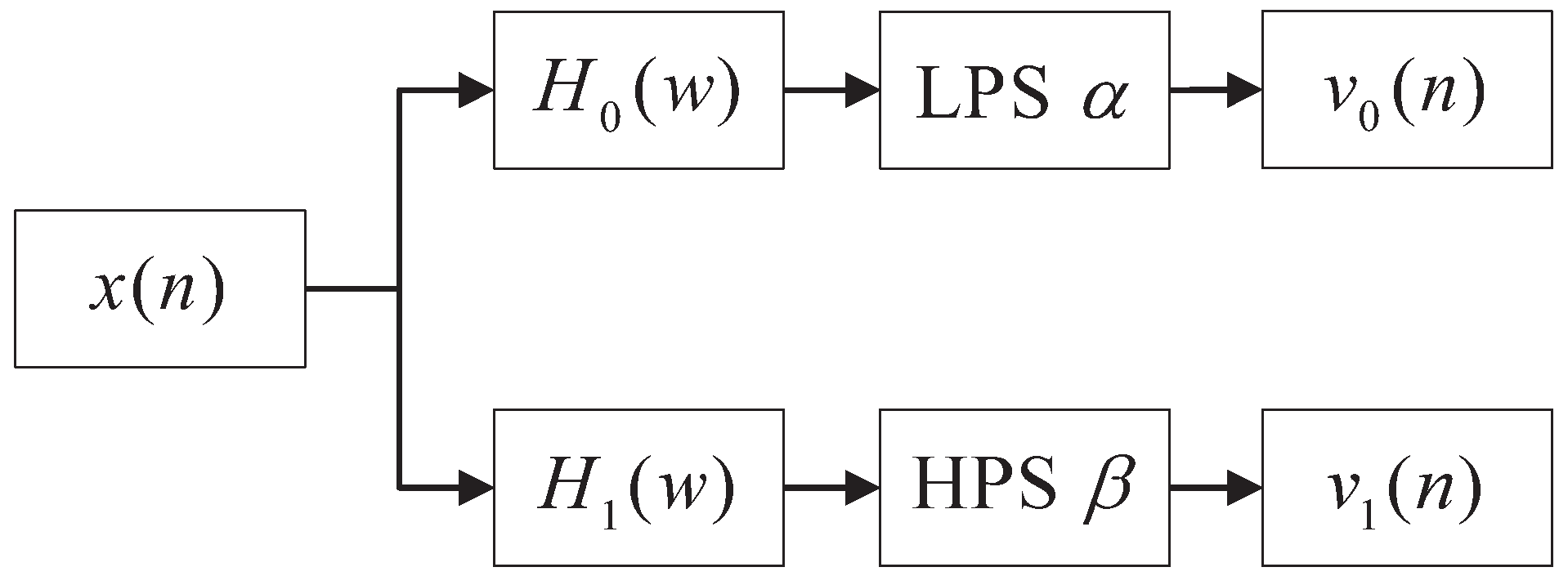
2.3.1. Tunable Q-Factor Wavelet Transform
2.3.2. Selection and Influence of Q-Factor Combination
2.4. Variational Mode Decomposition
2.5. Sparrow Search Algorithm
3. The Proposed Method
3.1. The Objective Function of the Optimization Algorithm
3.2. The Process of the Signal Decomposition Method Based on SSA-RSSD
- (1)
- According to experience, when utilizing the RSSD to process bearing fault vibration signals, the decomposition levels L of high- and low-resonance components are, respectively, set to 30 and 15, while the redundancy factor r is set to 3.5 for both components. The value range of the high Q-factor is [3, 6], the value range of the low Q-factor is [1, 3], and the initial value is set to , .
- (2)
- The various parameters of the SSA method are then set, and, subsequently, the population is initialized by randomly selecting several groups within the feasible range of high and low Q-factors.
- (3)
- The initial fitness is computed, and the position of the seeker is updated according to the early-warning value.
- (4)
- The location of subscribers is then updated.
- (5)
- According to the current minimum , the fitness and optimal position are updated.
- (6)
- Iterating steps (3) to (5), the position of the sparrow after reaching the maximum number of iterations is outputted, and the optimal values of and are determined under the current data conditions. If the convergence conditions are not satisfied, steps (2) to (4) are repeated until the convergence conditions are reached.
- (7)
- Taking the combination of Q-factors optimized by the SSA as parameters, the RSSD algorithm is utilized to process the fault vibration signal, resulting in the extraction of high- and low-resonance components.
3.3. Variational Mode Decomposition Based on Sparrow Search Algorithm Optimization
- (1)
- According to experience, the search range of K is established as [2, 10], the search range of is set as [10, 1500], and the initial values are set to , .
- (2)
- Set the parameters of the SSA method, and then initialize the population; that is, randomly select several groups in the feasible region of K and .
- (3)
- The initial fitness is computed, and the position of the seeker is updated according to the early-warning value.
- (4)
- Update the location of subscribers.
- (5)
- The fitness and optimal position are updated according to the current maximum frequency domain kurtosis.
- (6)
- Iterate step (3) to (5) until reaching the maximum number of iterations, then output the final position of the sparrow, and determine the optimal values of K and under the current data conditions.
- (7)
- Taking the K and optimized by the SSA as parameters, the VMD algorithm is employed to process the low-resonance component, and the IMF component with the maximum frequency domain kurtosis is obtained.
3.4. Fault Diagnosis Process
- (1)
- Firstly, the original vibration signal is processed utilizing the SSA-RSSD method described in Section 3.2 to obtain the optimal low-resonance component with the minimal .
- (2)
- Secondly, the optimal low-resonance component acquired in step 1 is further processed utilizing the SSA-VMD method described in Section 3.3 to extract the IMF with the highest frequency domain kurtosis.
- (3)
- Finally, the envelope spectrum of the optimal IMF is obtained through envelope demodulation, enabling the observation of fault characteristic frequencies within the envelope spectrum, thereby facilitating the completion of fault diagnosis.
4. Simulation Signal Verification
4.1. Construction of Simulation Signal
4.2. Method Validation
4.3. Robustness Testing
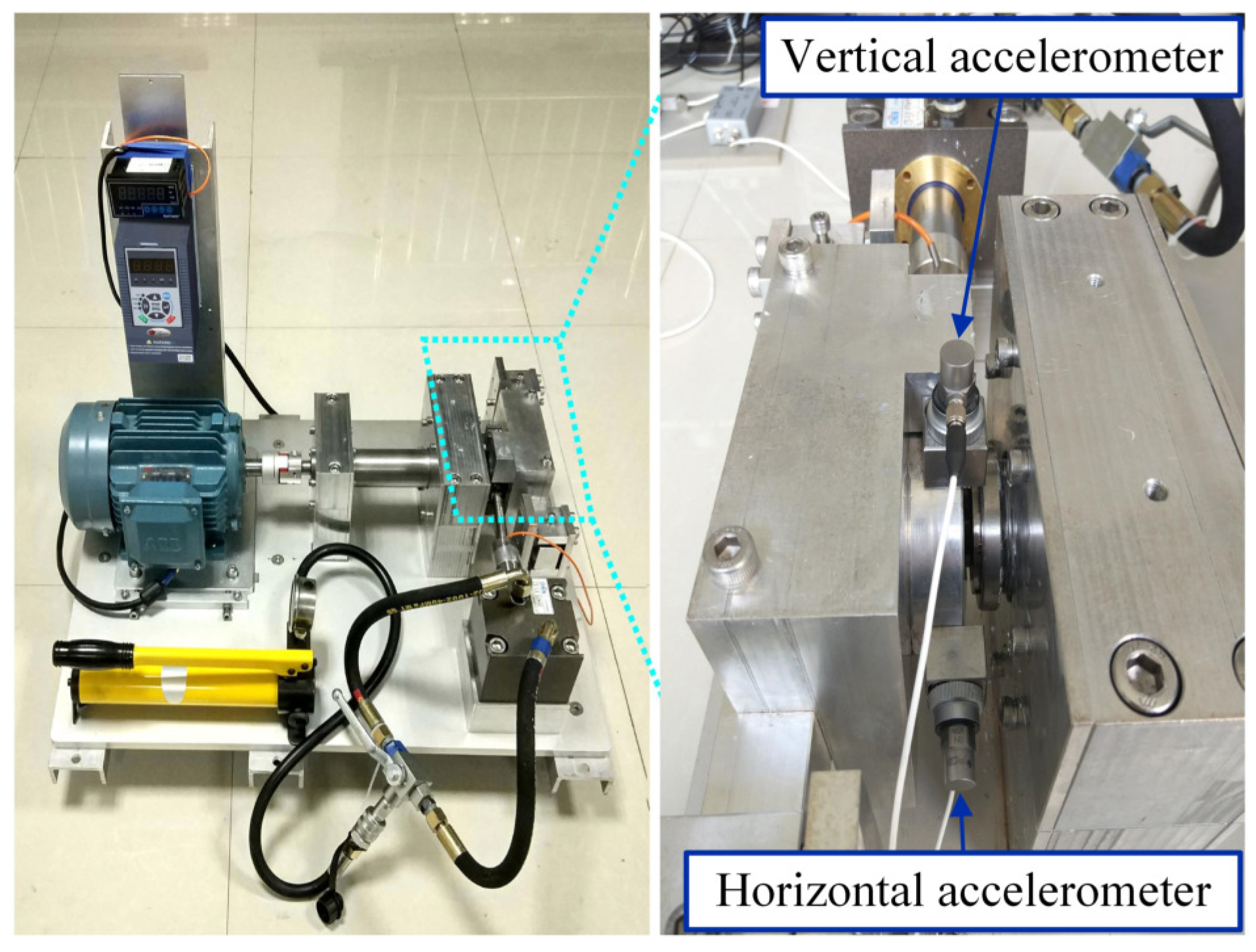
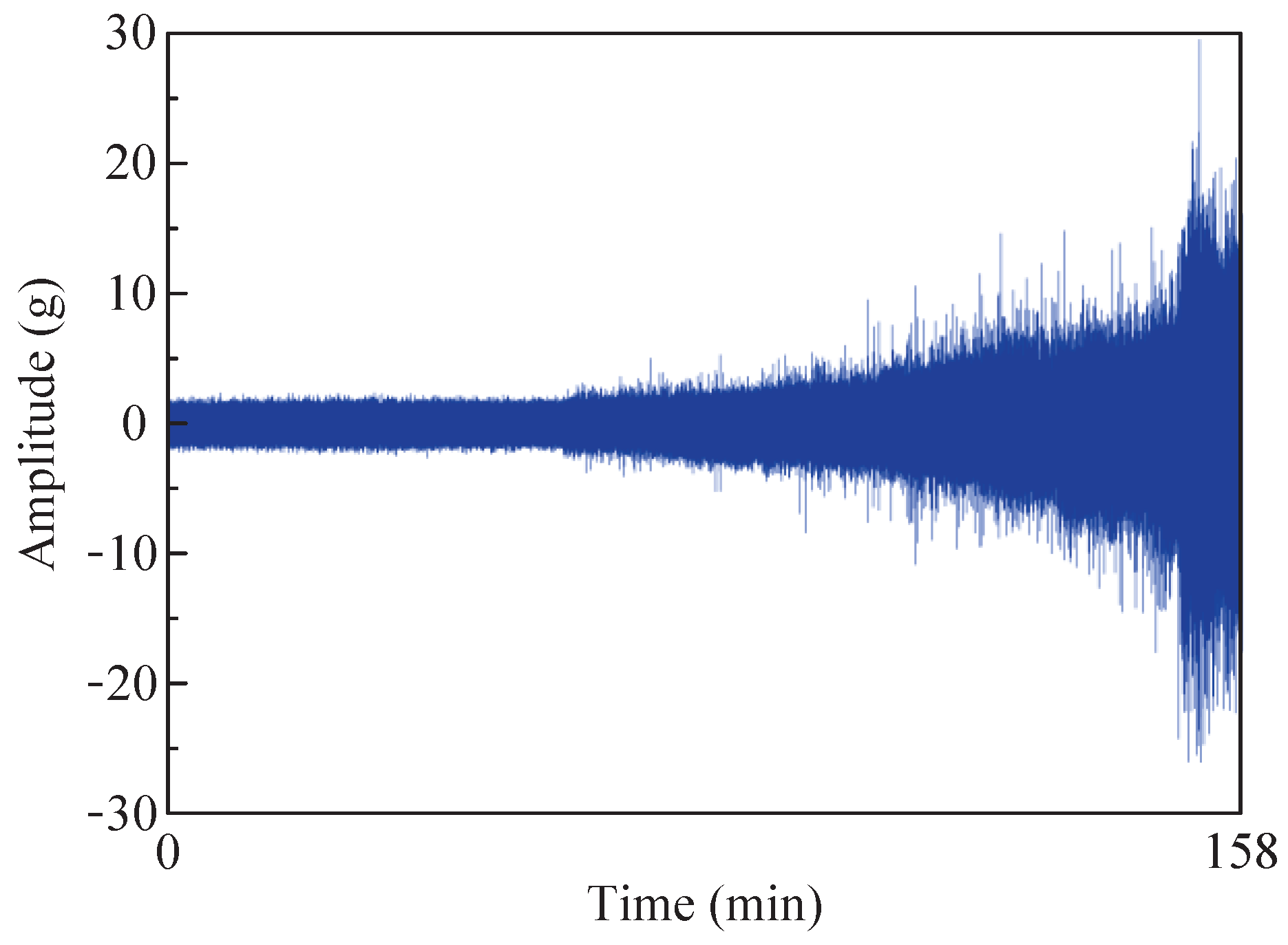
5. Example Verification
5.1. Data Declaration
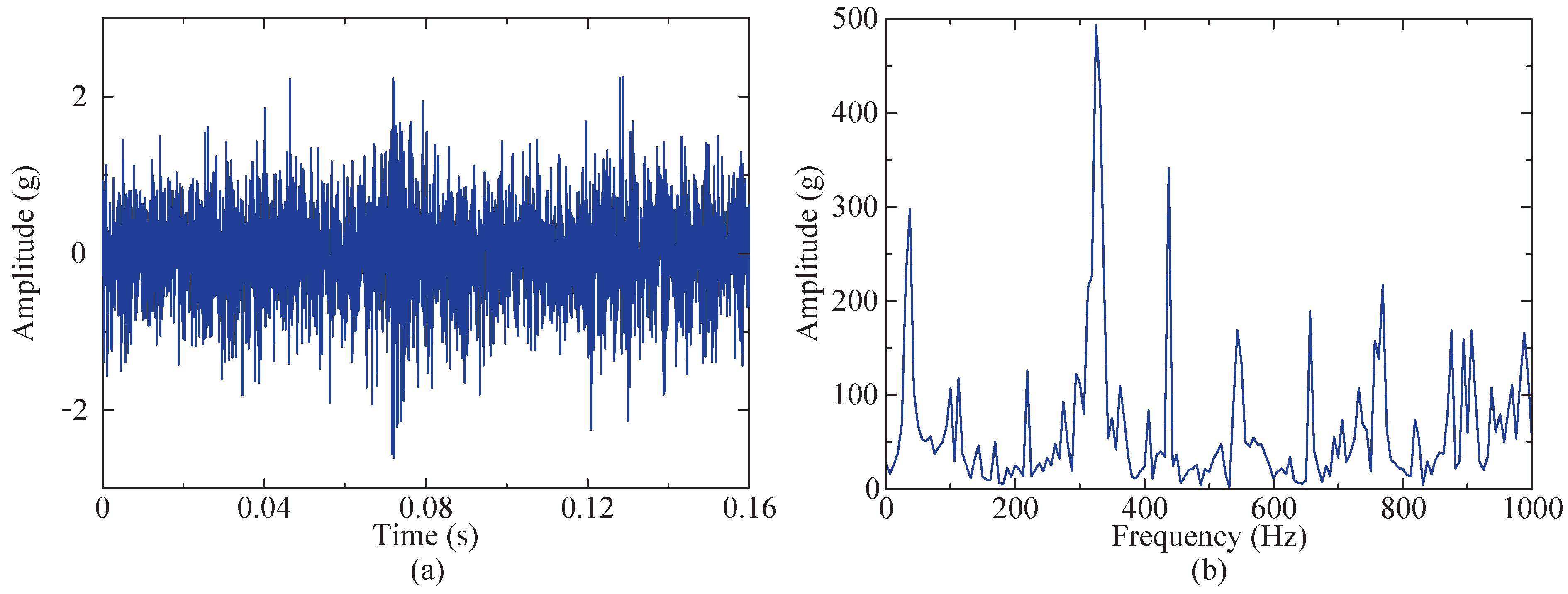
5.2. Method Verification
5.3. Robustness Testing
6. Conclusions
- (1)
- From the experimental results, it can be observed that the proposed method effectively extracts weak fault characteristic frequencies from complex signals and presents them clearly. The SSA-RSSD method is capable of isolating low-resonance components containing transient impact elements from the original signal, thereby reducing the influence of harmonics and noise. This method provides a preliminary extraction of the fault characteristics. Further enhancements and explorations of the fault characteristics can be achieved through the SSA-VMD method, leading to more accurate results.
- (2)
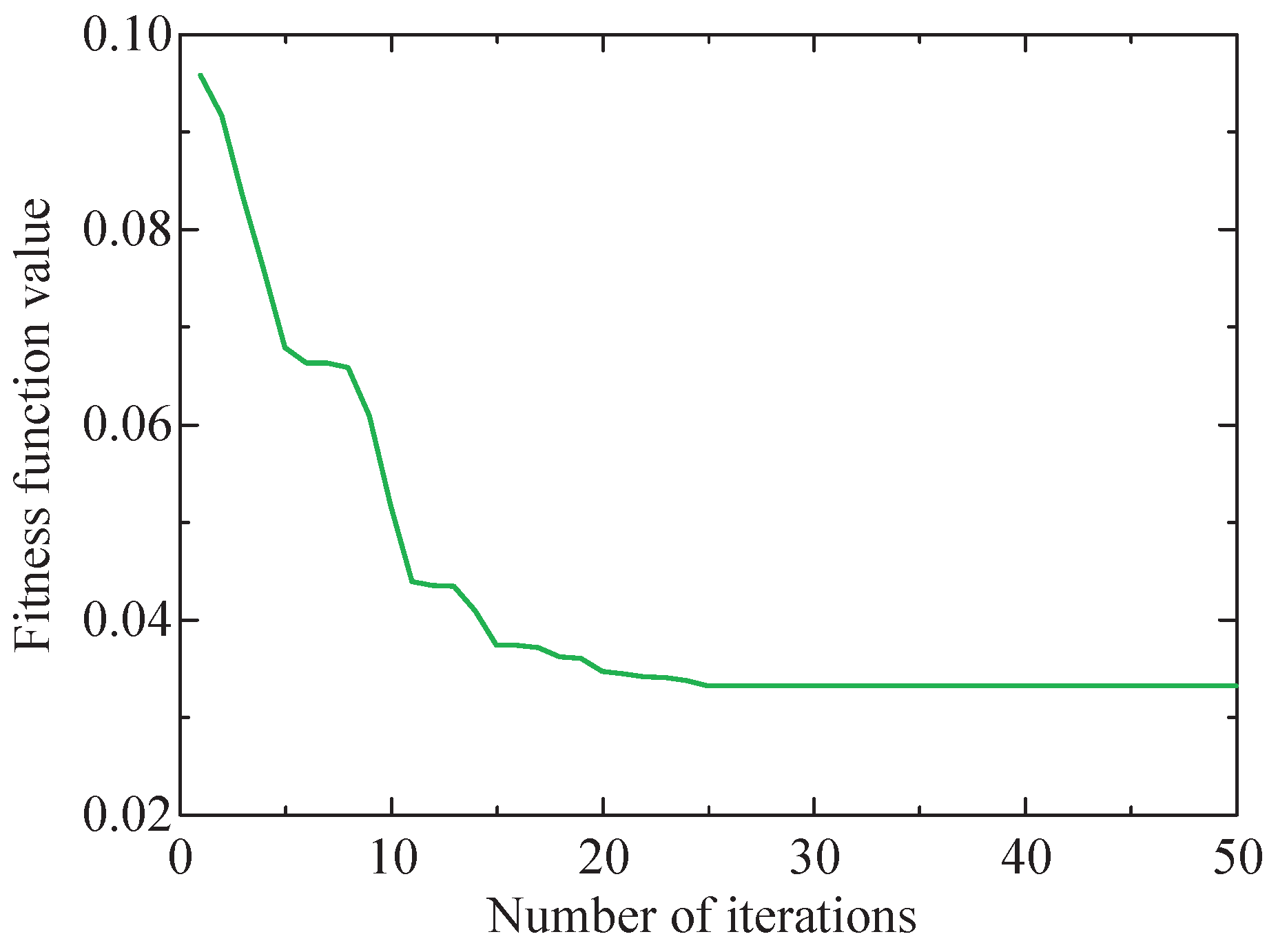
- By employing the SSA method to optimize the parameter combinations, the influence of human subjectivity can be effectively reduced, thereby enhancing the adaptability of the proposed method. A comparative analysis of the results obtained via the proposed method with those of the other three methods was conducted. The results demonstrate that in terms of parameter optimization, the proposed method surpasses the GA-RSSD method, enabling faster and more accurate identification of the optimal parameter combination. In terms of highlighting weak fault characteristics and reducing the impact of noise and harmonics, the proposed method surpasses both the SSA-RSSD and SSA-VMD methods, achieving signal components with a higher signal-to-noise ratio.
- (3)
- Through experiments, varying the noise in the simulated signal and introducing noise into the faulty bearing instance signal, the robustness of the proposed method is further demonstrated. From the results, it can be observed that despite the significant impact of various types of noise on the signal, the proposed method is still capable of extracting fault characteristic signals. Additionally, we found that as the impact of noise continues to increase, the proposed method gradually becomes unable to extract fault characteristic frequencies. In summary, the proposed method essentially achieved the research objectives, laying a foundation for subsequent fault diagnosis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Z.; Song, D.; Xu, X.; Lei, L. A fault diagnosis method of bogie axle box bearing based on spectrum whitening demodulation. Sensors 2020, 20, 7155. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.; Ding, N.; Li, N.; Liu, L.; Hou, N.; Xu, N.; Guo, W.; Tian, L.; Xu, H.; Wu, C.; et al. A review of bearing failure Modes, mechanisms and causes. Eng. Fail. Anal. 2023, 152, 107518. [Google Scholar] [CrossRef]
- Zhang, M.; Yin, J.; Chen, W. Rolling Bearing Fault Diagnosis Based on Time-Frequency Feature Extraction and IBA-SVM. IEEE Access 2022, 10, 85641–85654. [Google Scholar] [CrossRef]
- David, I.Z.; Oscar, T.P.; Antonio, V.G. Bearing fault diagnosis in rotating machinery based on cepstrum pre-whitening of vibration and acoustic emission. Int. J. Adv. Manuf. Technol. 2019, 104, 4155–4168. [Google Scholar]
- Wang, L. Research on Bearing Diagnosis Method Based on Entropy Theory of Time Series Arrangement. Master’s Thesis, East China Jiaotong University, Nanchang, China, 2023. [Google Scholar]
- Yin, C.; Wang, Y.; Ma, G.; Wang, Y.; Sun, Y.; He, Y. Weak fault feature extraction of rolling bearings based on improved ensemble noise-reconstructed EMD and adaptive threshold denoising. Mech. Syst. Signal. Process. 2022, 171, 108834. [Google Scholar] [CrossRef]
- Zhang, X.; Wan, S.; He, Y.; Wang, X.; Dou, L. Teager energy spectral kurtosis of wavelet packet transform and its application in locating the sound source of fault bearing of belt conveyor. Measurement 2021, 173, 108367. [Google Scholar] [CrossRef]
- Quinde, I.R.; Sumba, J.C.; Ochoa, L.E.; Vallejo Guevara, A., Jr.; Morales-Menendez, R. Bearing fault diagnosis based on optimal time-frequency representation method. IFAC-PapersOnLine 2019, 52, 194–199. [Google Scholar] [CrossRef]
- Hao, Y.; Zhang, C.; Lu, Y.; Zhang, L.; Lei, Z.; Li, Z. A novel autoencoder modeling method for intelligent assessment of bearing health based on Short-Time Fourier Transform and ensemble strategy. Precis. Eng. 2024, 85, 89–101. [Google Scholar] [CrossRef]
- Han, B.; Song, Z.; Wei, C.; Zhou, Y. Transient-extracting wavelet transform for impulsive-like signals and application to bearing fault detection. Meas. Sci. Technol. 2023, 34, 125029. [Google Scholar]
- Zhou, H.; Yang, J.; Xiang, H.; Chen, J. An adaptive morphological filtering and feature enhancement method for spindle motor bearing fault diagnosis. Appl. Acoust. 2023, 209, 109400. [Google Scholar] [CrossRef]
- Zhang, W. Fault Diagnosis of Axle Box Bearing of High Speed Train Based on Sparse Representation. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2018. [Google Scholar]
- Hou, Y.; Zhou, C.; Tian, C.; Wang, D.; He, W.; Huang, W.; Wu, P.; Wu, D. Acoustic feature enhancement in rolling bearing fault diagnosis using sparsity-oriented multipoint optimal minimum entropy deconvolution adjusted method. Appl. Acoust. 2022, 201, 109105. [Google Scholar] [CrossRef]
- Selesnick, I.W. Resonance-based signal decomposition: A new sparsity-enabled signal analysis method. Signal. Process. 2011, 91, 2793–2809. [Google Scholar] [CrossRef]
- Chen, X.; Yu, D.; Luo, J. Envelope demodulation method based on resonance-based sparse signal decomposition and its application in roller bearing fault diagnosis. J. Vib. Eng. Technol. 2012, 25, 628–636. [Google Scholar]
- Wang, C.; Li, H.; Ou, J.; Hu, R.; Hu, S.; Liu, A. Identification of planetary gearbox weak compound fault based on parallel dual-parameter optimized resonance sparse decomposition and improved MOMEDA. Measurement 2020, 165, 108079. [Google Scholar] [CrossRef]
- Zhang, D.; Entezami, M.; Stewart, E.; Roberts, C.; Yu, D. Adaptive fault feature extraction from wayside acoustic signals from train bearings. J. Sound. Vib. 2018, 425, 221–238. [Google Scholar] [CrossRef]
- Chen, B.; Shen, B.; Chen, F.; Tian, H.; Xiao, W.; Zhang, F.; Zhao, C. Fault diagnosis method based on integration of RSSD and wavelet transform to rolling bearing. Measurement 2019, 131, 400–411. [Google Scholar] [CrossRef]
- Lu, Y.; Ding, E.J.; Du, J.; Chen, G.C.; Zheng, Y. Safety detection approach in industrial equipment based on RSSD with adaptive parameter optimization algorithm. Saf. Sci. 2020, 125, 104605. [Google Scholar] [CrossRef]
- Wang, W.; Liu, W.; Lin, C.; Li, M.; Zheng, Y.; Liu, D. Fault detection system of subway sliding plug door based on adaptive EMD method. Meas. Sci. Technol. 2023, 35, 015102. [Google Scholar] [CrossRef]
- Huang, D.; Ke, L.; Mi, B.; Zhao, L.; Sun, G. A New Incipient Fault Diagnosis Method Combining Improved RLS and LMD Algorithm for Rolling Bearings With Strong Background Noise. IEEE Access 2018, 6, 26001–26010. [Google Scholar]
- Zhang, M.; Jiang, Z.; Feng, K. Research on variational mode decomposition in rolling bearings fault diagnosis of the multistage centrifugal pump. Mech. Syst. Signal. Process. 2017, 93, 460–493. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE T. Signal. Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, Y.; Wang, Q.; Wang, J.; Luo, Y. Ensemble empirical mode decomposition energy moment entropy and enhanced long short-term memory for early fault prediction of bearing. Measurement 2022, 188, 110417. [Google Scholar] [CrossRef]
- Li, X.; Ma, J.; Wang, X.; Wu, J.; Li, Z. An improved local mean decomposition method based on improved composite interpolation envelope and its application in bearing fault feature extraction. ISA Trans. 2020, 97, 365–383. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Yang, Y.; Cui, Z.; Shen, J. Vibration fault diagnosis of wind turbines based on variational mode decomposition and energy entropy. Energy 2019, 174, 1100–1109. [Google Scholar] [CrossRef]
- Xu, Z.; Li, C.; Yang, Y. Fault diagnosis of rolling bearing of wind turbines based on the Variational Mode Decomposition and Deep Convolutional Neural Networks. Appl. Soft. Comput. 2020, 95, 106515. [Google Scholar] [CrossRef]
- Wang, J.; Zhan, C.; Li, S.; Zhao, Q.; Liu, J.; Xie, Z. Adaptive variational mode decomposition based on Archimedes optimization algorithm and its application to bearing fault diagnosis. Measurement 2022, 191, 110798. [Google Scholar] [CrossRef]
- Dibaj, A.; Ettefagh, M.M.; Hassannejad, R.; Ehghaghi, M.B. Fine-tuned variational mode decomposition for fault diagnosis of rotary machinery. Struct. Health Monit. 2020, 19, 1453–1470. [Google Scholar] [CrossRef]
- Nazari, M.; Sakhaei, S.M. Successive variational mode decomposition. Signal. Process. 2020, 174, 107610. [Google Scholar] [CrossRef]
- Gu, J.; Peng, Y.; Lu, H.; Chang, X.; Cao, S.; Chen, G.; Cao, B. An optimized variational mode decomposition method and its application in vibration signal analysis of bearings. Struct. Health Monit. 2022, 21, 2386–2407. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, L.; Yang, L. Axle box bearing fault diagnosis based on average autocorrelation and optimized VMD. J. Vib. Meas. Diagn. 2023, 43, 231–239+405. [Google Scholar]
- Zhang, H.; Shi, P.; Han, D.; Jia, L. Research on rolling bearing fault diagnosis method based on AMVMD and convolutional neural networks. Measurement 2023, 217, 113028. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, L.; Chen, Z.; Gao, H.; Shi, Z.; Zhang, G. Dynamics modelling and vibration characteristics of urban rail vehicle axle-box bearings with the cage crack. Mech. Syst. Signal. Process. 2023, 205, 110870. [Google Scholar] [CrossRef]
- Guo, L.; Yu, Y.; Chen, Z.; Liu, Y.; Gao, H. Study on dynamic characteristics of urban rail transit vehicle considering faulty axle-box bearings under variable speeds. Mech. Syst. Signal. Process. 2024, 206, 110849. [Google Scholar] [CrossRef]
- Chen, J.; Hua, C.; Dong, D.; Ouyang, H. Adaptive scale decomposition and weighted multikernel correntropy for wheelset axle box bearing diagnosis under impact interference. Mech. Mach. Theory 2023, 181, 105220. [Google Scholar] [CrossRef]
- Yu, G.; Yan, G.; Ma, B. Feature enhancement method of rolling bearing acoustic signal based on RLS-RSSD. Measurement 2022, 192, 110883. [Google Scholar] [CrossRef]
- Selesnick, I.W. Wavelet transform with tunable Q-factor. IEEE Trans. Signal. Process. 2011, 59, 3560–3575. [Google Scholar] [CrossRef]
- Huang, W.; Sun, H.; Wang, W. Resonance-Based Sparse Signal Decomposition and its Application in Mechanical Fault Diagnosis: A Review. Sensors 2017, 17, 1279. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q. Research on Diagnosis Algorithm and Generation Mechanism of Abnormal Noise for Automobile Engine. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2021. [Google Scholar]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Fan, J.; Qi, Y.; Gao, X.; Li, Y.; Wang, L. Compound fault diagnosis of rolling element bearings using multipoint sparsity–multipoint optimal minimum entropy deconvolution adjustment and adaptive resonance-based signal sparse decomposition. J. Vib. Control. 2021, 27, 1212–1230. [Google Scholar] [CrossRef]
- Pan, B. Research on Fault Diagnosis Method of EMU Axle Box Bearing Based on Optimized RSSD and VMD. Master’s Thesis, China Academy of Railway Sciences, Beijing, China, 2021. [Google Scholar]
- Bandt, C.; Pompe, B. Permutation Entropy: A Natural Complexity Measure for Time Series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2018, 69, 401–412. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Iteration Step | Computing Time | Optimal Fitness |
|---|---|---|---|
| GA-RSSD | 25 | 109 s | 0.04059189 |
| SSA-RSSD | 23 | 78 s | 0.03942489 |
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| Inner race diameter/mm | 29.30 | Ball diameter/mm | 7.92 |
| Outer race diameter/mm | 39.80 | Number of balls | 8 |
| Bearing mean diameter/mm | 34.55 | Contact angle/(°) | 0 |
| Load rating (dynamic)/N | 12820 | Load rating (static)/N | 66,500 |
| Method | Iteration Step | Computing Time | Optimal Fitness |
|---|---|---|---|
| GA-RSSD | 26 | 113 s | 0.03517653 |
| SSA-RSSD | 25 | 85 s | 0.03323725 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, J.; Zhang, Q.; Tang, M.; Lin, D.; Liu, J.; Xu, S. Research on a Fault Feature Extraction Method for an Electric Multiple Unit Axle-Box Bearing Based on a Resonance-Based Sparse Signal Decomposition and Variational Mode Decomposition Method Based on the Sparrow Search Algorithm. Sensors 2024, 24, 4638. https://doi.org/10.3390/s24144638
Qiu J, Zhang Q, Tang M, Lin D, Liu J, Xu S. Research on a Fault Feature Extraction Method for an Electric Multiple Unit Axle-Box Bearing Based on a Resonance-Based Sparse Signal Decomposition and Variational Mode Decomposition Method Based on the Sparrow Search Algorithm. Sensors. 2024; 24(14):4638. https://doi.org/10.3390/s24144638
Chicago/Turabian StyleQiu, Jiandong, Qiang Zhang, Minan Tang, Dingqiang Lin, Jiaxuan Liu, and Shusheng Xu. 2024. "Research on a Fault Feature Extraction Method for an Electric Multiple Unit Axle-Box Bearing Based on a Resonance-Based Sparse Signal Decomposition and Variational Mode Decomposition Method Based on the Sparrow Search Algorithm" Sensors 24, no. 14: 4638. https://doi.org/10.3390/s24144638