
Effortless Totem-Pole Converter Control Using a Power Factor Correction Peak Current-Mode Controller



Abstract
1. Introduction
- Expanding the application and the math of the PFC PCM control method to the totem-pole converter;
- Proposing three input current sensing methods for adapting the PCM controller on the totem-pole converter;
- Comparing and assessing the performance of each proposed sensing method while simulating the PCM controller on the totem-pole converter.
2. PFC Peak Current-Mode Controller
- Understand the operation of the PFC converter;
- Find the PFC converter’s main parameters (e.g., , , and );
- Calculate using Equation (5);
- Check if the calculated value in step c satisfies Equation (6).
3. Applying the PFC PCM Controller to the Totem-Pole Converter
3.1. Determining for the Totem-Pole Converter
3.2. Validating for the Totem-Pole Converter
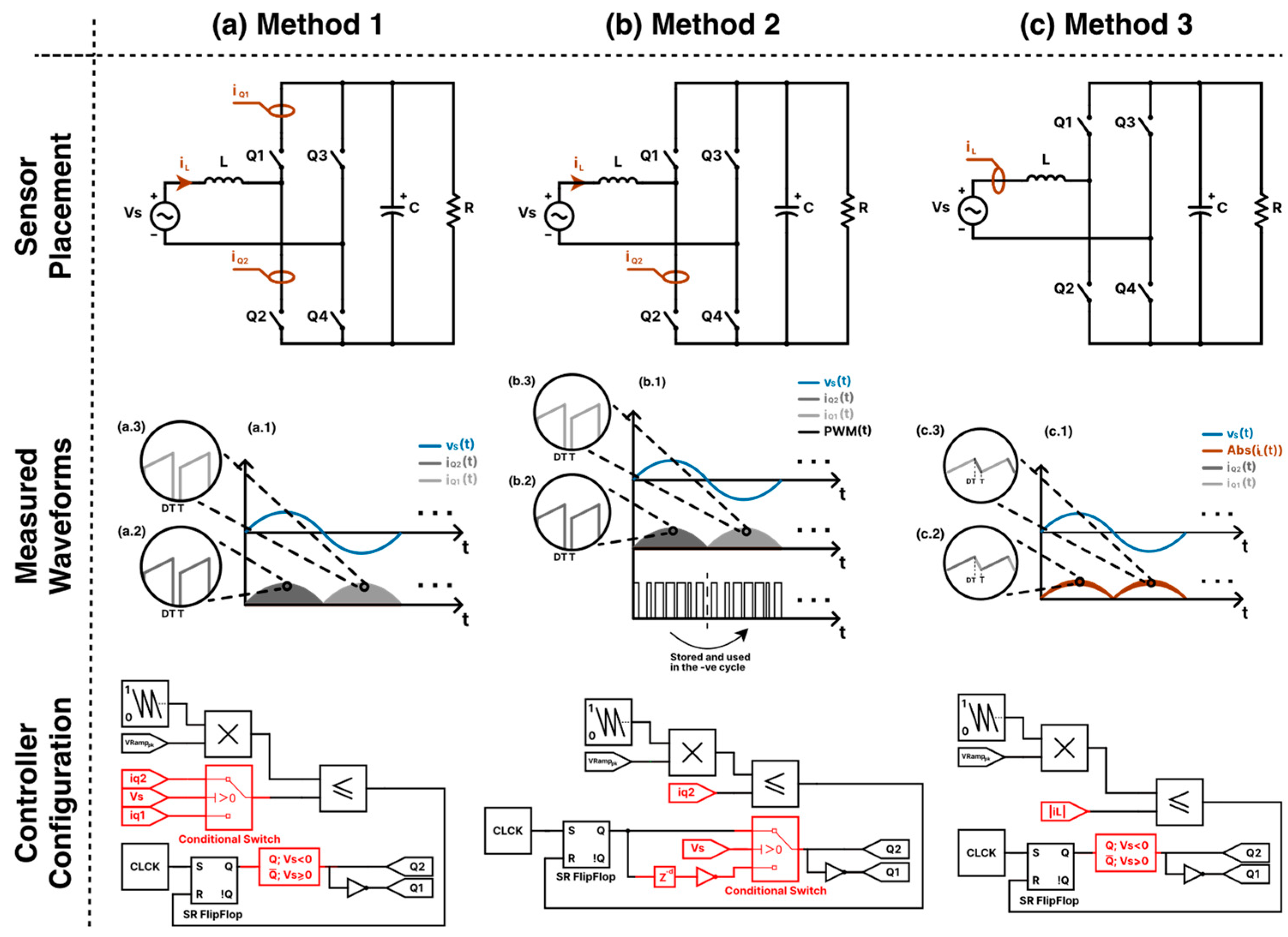
3.3. Totem-Pole Converter’s Sensing Challenges and Proposed Solutions
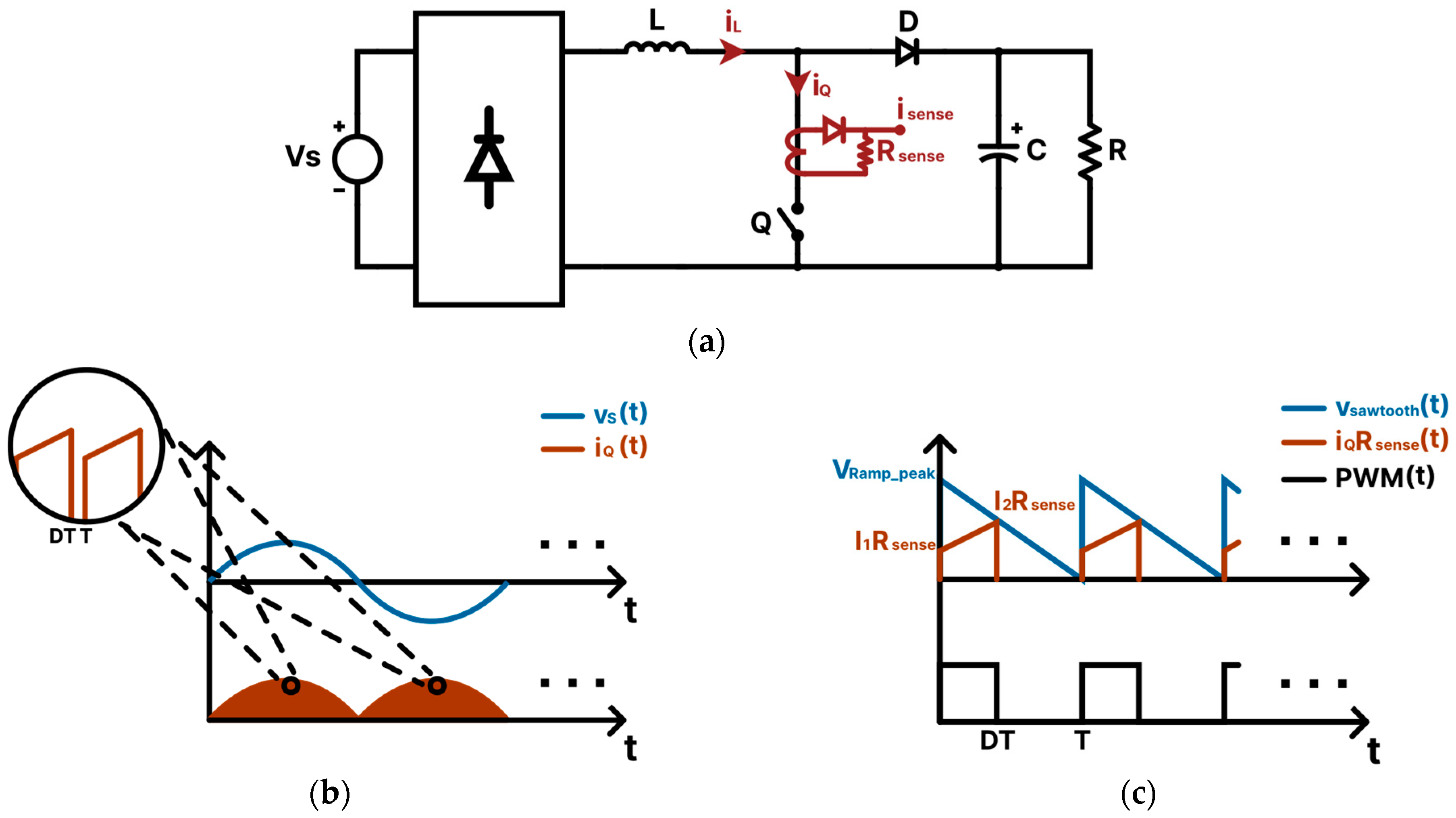
3.3.1. Method 1: Sensing the Current across the Two Switches
3.3.2. Method 2: The Memory Method
3.3.3. Method 3: Sensing the Inductor Current
4. Simulation Results and Discussion
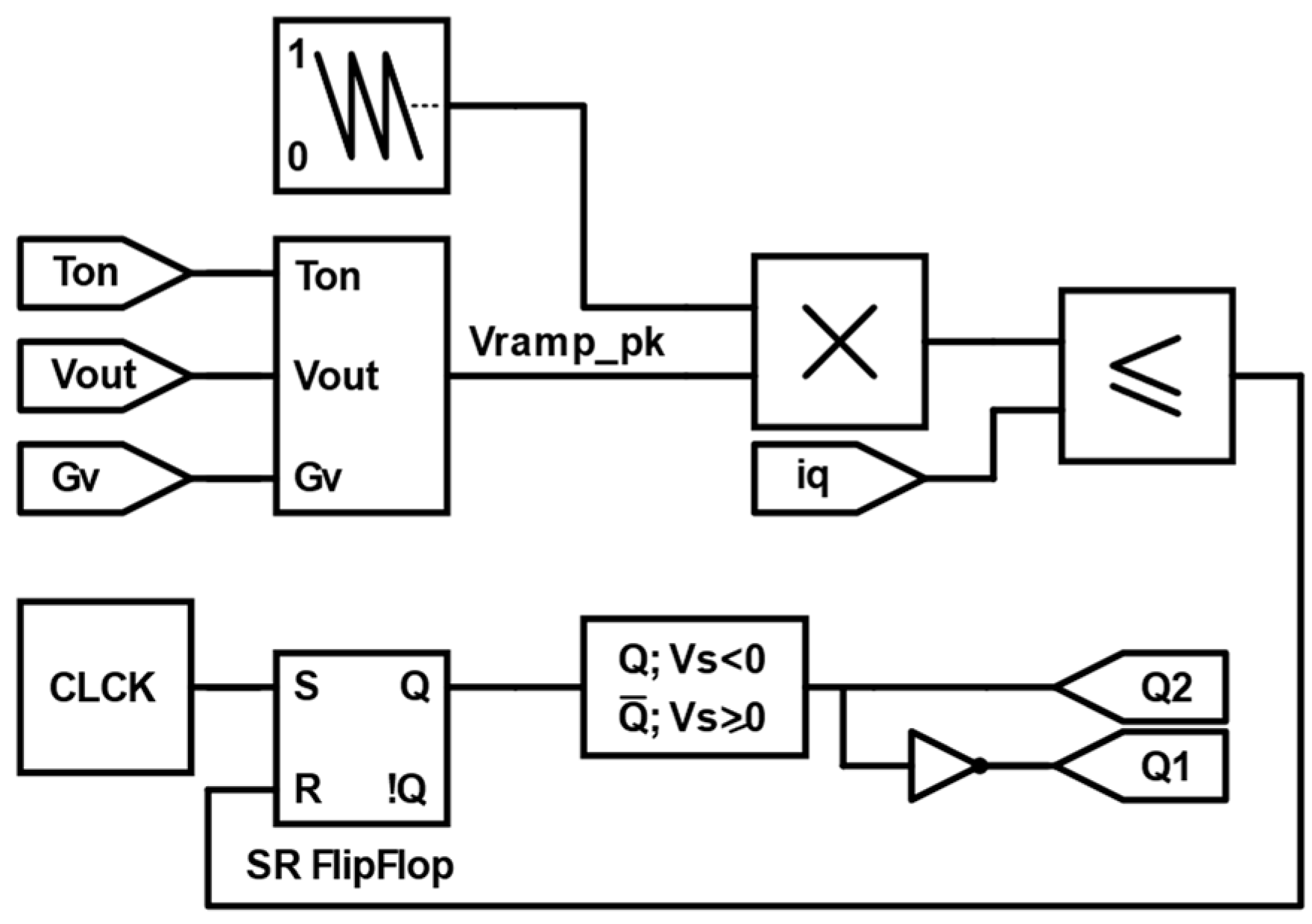
- was calculated and multiplied by a unity negative-ramp sawtooth function where its frequency determined the switching frequency of the totem-pole converter. The on-time was calculated from the previous switching cycle. was obtained from the outer voltage loop, which was selected to be a PI controller.
- The scaled sawtooth signal was then compared to the sensed current of the respective sensing method.
- The SR flipflop was set at the beginning of every switching cycle as long as the measured current was less than the scaled sawtooth signal. The output of the SR flipflop Q gave the PWM signal for switch and the complementary signal for switch within the positive half cycle of the grid voltage. In the negative half cycle, and as we previously discussed, and functions were inverted. Thus, their PWM signals were inverted.
- -
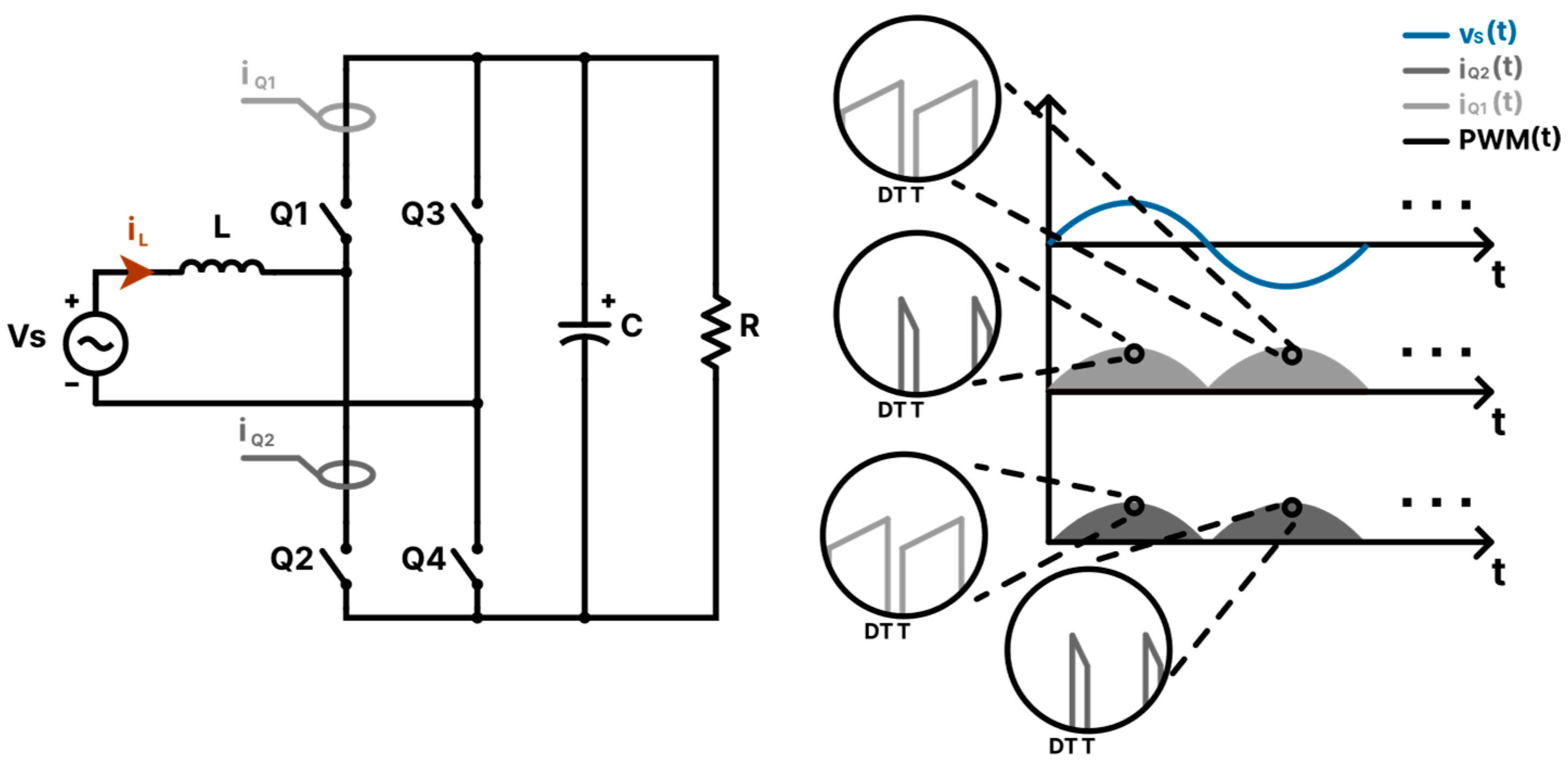
- The integration of sensing method 1 or 3 into the PFC PCM controller yielded nearly identical input current and output voltage waveforms, leading to similar behavior and THD% value that conformed to the power quality standards. The primary distinction lay in the sensor count: method 3 employed a single switch, in contrast to method 1’s two switches. This offered a notable advantage to method 3, enhancing controller simplicity and cost-effectiveness, because managing a single sensor was easier than attempting to merge the current sensing data of two sensors for PFC control. However, this came at the cost of using a shunt current sensor, which normally has higher power losses. Thus, by proposing several sensing techniques that all satisfy the power quality standards, designers are afforded the flexibility to select the most appropriate solution based on their specific needs and design constraints.
- -
- The concept of method 2 is based on the assumption that the totem-pole converter has an identical operation in the two half cycles. However, an examination of the waveforms in Figure 7 and Figure 9 reveals a discrepancy: while the input current waveform remained sinusoidal during the positive half cycle when employing method 2, it became severely distorted in the negative half. This indicates that the totem-pole operation was not identical in both half cycles. Moreover, the practice of storing the PWM control signal from the positive half and applying it to the negative half led to this distortion and a sluggish response to sudden load variations. Additionally, method 2 required substantial memory resources, resulting in simulation times that were more than 10 times longer than those of methods 1 and 3. Therefore, given these operational challenges, method 2 is not suitable for practical use without modification.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Buck–Boost Converter
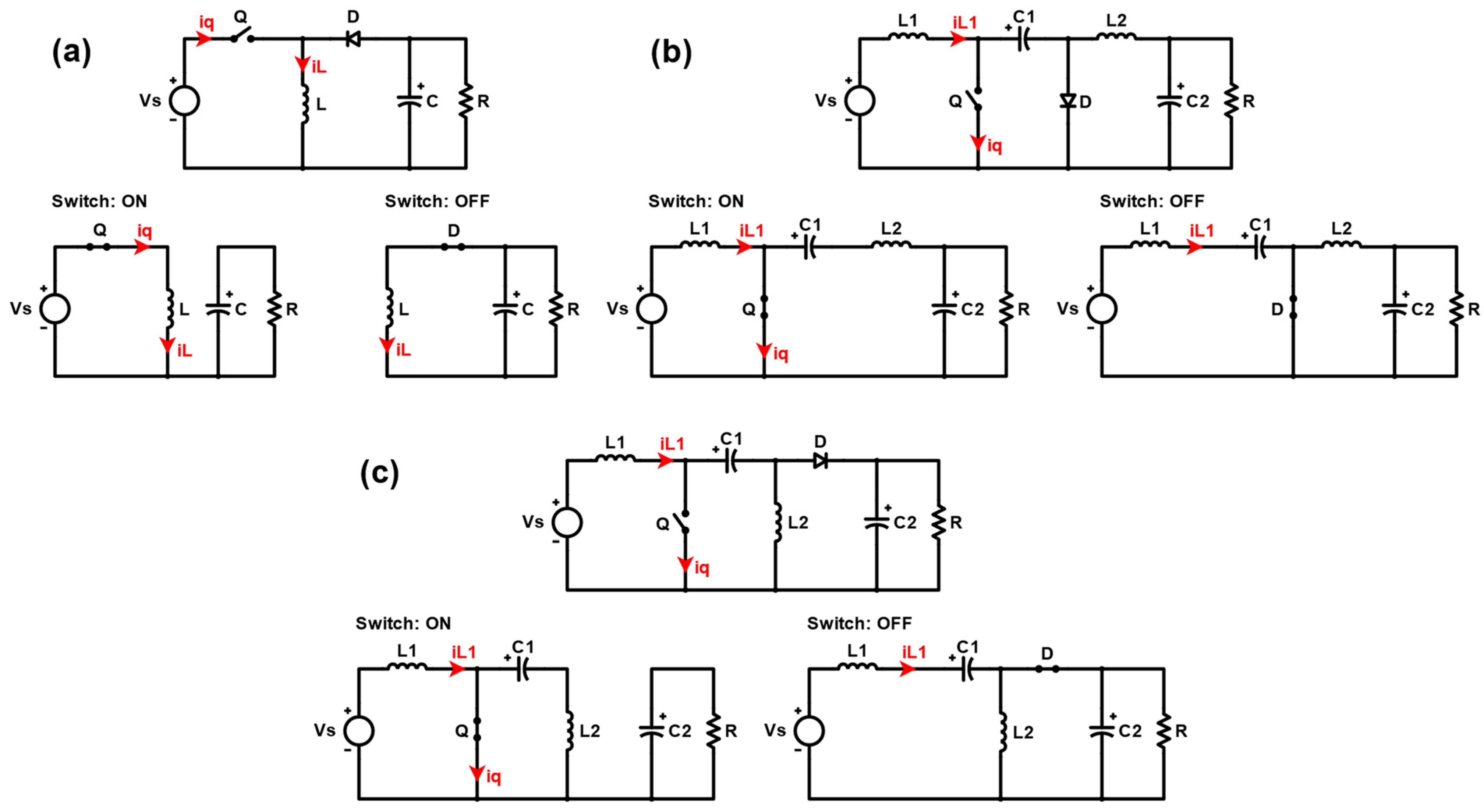
Appendix A.2. Cuk Converter
Appendix A.3. SEPIC Converter
References
- Fu, H.; Duan, S.; Li, Y.; Li, Q. Improved Control Strategy for Zero-Crossing Distortion Elimination in Totem-Pole PFC Converter with Coupled Inductor. Energies 2022, 15, 5437. [Google Scholar] [CrossRef]
- Do, N.-N.; Huang, B.-S.; Phan, N.-T.; Nguyen, T.-T.; Wu, J.-H.; Liu, Y.-C.; Chiu, H.-J. Design and Implementation of a Control Method for GaN-Based Totem-Pole Boost-Type PFC Rectifier in Energy Storage Systems. Energies 2020, 13, 6297. [Google Scholar] [CrossRef]
- Li, L.; Wang, W.; Lyu, D.; Min, R.; Tong, Q.; Peng, H.; Yu, J. Maximum Efficiency Average Current Controller Based on a Comprehensive Charge Rate Model for DCM Boost PFC Converter. IEEE Trans. Power Electron. 2021, 36, 6046–6055. [Google Scholar] [CrossRef]
- Yao, K.; Wu, C.; Chen, J.; Yang, J.; Li, J.; Jin, Z.; Wang, S.; Yang, R.; Liu, L.; Gao, Y.; et al. A Scheme to Improve Power Factor and Dynamic Response Performance for CRM/DCM Buck–Buck/Boost PFC Converter. IEEE Trans. Power Electron. 2021, 36, 1828–1843. [Google Scholar] [CrossRef]
- Li, C.-Y.; Chao, N.-C.; Chen, H.-C. Design and Implementation of Four-Switch Current Sensorless Control for Three-Phase PFC Converter. IEEE Trans. Ind. Electron. 2020, 67, 3307–3312. [Google Scholar] [CrossRef]
- Chen, H.-C.; Lu, C.-Y.; Li, G.-T. Design and Implementation of Three-Phase Current Sensorless Control for PFC Bridge Converter with Considering Voltage Drops of Power Semiconductors. IEEE Trans. Ind. Electron. 2018, 65, 9234–9242. [Google Scholar] [CrossRef]
- Santoyo-Anaya, M.A.; Rodríguez-Rodríguez, J.R.; Moreno-Goytia, E.L.; Venegas-Rebollar, V.; Salgado-Herrera, N.M. Current-Sensorless VSC-PFC Rectifier Control with Enhance Response to Dynamic and Sag Conditions Using a Single PI Loop. IEEE Trans. Power Electron. 2018, 33, 6403–6415. [Google Scholar] [CrossRef]
- Chen, H.-C.; Lu, C.-Y.; Li, G.-T.; Chen, W.-C. Digital Current Sensorless Control for Dual-Boost Half-Bridge PFC Converter with Natural Capacitor Voltage Balancing. IEEE Trans. Power Electron. 2017, 32, 4074–4083. [Google Scholar] [CrossRef]
- Luo, H.; Zhou, B.; Liu, G.; Zang, T.; Chen, S.; Zhou, X.; Xu, J. Voltage-Mode Variable-Frequency Controlled LLC Resonant Power Factor Correction Converter and Its Accurate Numerical Calculation Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1979–1994. [Google Scholar] [CrossRef]
- Mukherjee, D.; Kastha, D. Voltage Sensorless Control of VIENNA Rectifier in the Input Current Oriented Reference Frame. IEEE Trans. Power Electron. 2019, 34, 8079–8091. [Google Scholar] [CrossRef]
- Chandwani, A.; Dey, S.; Mallik, A. Parameter-Variation-Tolerant Robust Current Sensorless Control of a Single-Phase Boost PFC. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 3, 933–945. [Google Scholar] [CrossRef]
- Lamo, P.; López, F.; Pigazo, A.; Azcondo, F.J. Stability and Performance Assessment of Single-Phase T /4 PLLs with Secondary Control Path in Current Sensorless Bridgeless PFCs. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 674–685. [Google Scholar] [CrossRef]
- López, F.; López-Martín, V.M.; Azcondo, F.J.; Corradini, L.; Pigazo, A. Current-Sensorless Power Factor Correction with Predictive Controllers. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 891–900. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, C.; Srdic, S.; Lukic, S.M. Predictive Control of a Series-Interleaved Multicell Three-Level Boost Power-Factor-Correction Converter. IEEE Trans. Power Electron. 2018, 33, 8948–8960. [Google Scholar] [CrossRef]
- Choi, Y.-J.; Kim, T.-J.; Kim, R.-Y. An Active Partial Switching Method in Tertiary Loop for a High-Efficiency Predictive Current-Mode Control PFC Converter. IEEE Trans. Ind. Electron. 2018, 65, 7818–7828. [Google Scholar] [CrossRef]
- Huang, Q.; Yu, R.; Ma, Q.; Huang, A.Q. Predictive ZVS Control with Improved ZVS Time Margin and Limited Variable Frequency Range for a 99% Efficient, 130-W/In3 MHz GaN Totem-Pole PFC Rectifier. IEEE Trans. Power Electron. 2019, 34, 7079–7091. [Google Scholar] [CrossRef]
- Nair, H.S.; Lakshmi Narasamma, N. An Improved Digital Algorithm for Boost PFC Converter Operating in Mixed Conduction Mode. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 4235–4245. [Google Scholar] [CrossRef]
- Nair, H.S.; Lakshminarasamma, N. A Computationally Simple Predictive CCM Average Current Controller with Nearly Zero Tracking Error for Boost PFC Converter. IEEE Trans. Ind. Appl. 2020, 56, 5083–5094. [Google Scholar] [CrossRef]
- Guo, X.; Ren, H.-P.; Li, J. Robust Model-Predictive Control for a Compound Active-Clamp Three-Phase Soft-Switching PFC Converter under Unbalanced Grid Condition. IEEE Trans. Ind. Electron. 2018, 65, 2156–2166. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, H.; Wang, H.; Dan, H.; Su, M.; Pan, X. Peak and Valley Current Control for Cuk PFC Converter to Reduce Capacitance. IEEE Trans. Power Electron. 2022, 37, 313–321. [Google Scholar] [CrossRef]
- Bi, Y.; Wu, C.; Zhao, T.; Li, H.; Xu, J.; Shu, G.; Wang, Y. Modified Deadbeat Predictive Current Control Method for Single-Phase AC–DC PFC Converter in EV Charging System. IEEE Trans. Ind. Electron. 2023, 70, 286–297. [Google Scholar] [CrossRef]
- Wang, P.; Bi, Y.; Gao, F.; Song, T.; Zhang, Y. An Improved Deadbeat Control Method for Single-Phase PWM Rectifiers in Charging System for EVs. IEEE Trans. Veh. Technol. 2019, 68, 9672–9681. [Google Scholar] [CrossRef]
- Sha, J.; Hu, J.; Wei, H. A Discrete Average Current Mode Control CCM Boost PFC Converter with Hybrid Pulse Train Modulation and Dual Edge Modulation. IEEE Trans. Ind. Electron. 2023, 70, 10003–10013. [Google Scholar] [CrossRef]
- Geng, X.; Xu, J.; Wang, L.; Chen, Z.; Huang, R. Performance Analysis and Improvement of PI-Type Current Controller in Digital Average Current Mode Controlled Three-Phase Six-Switch Boost PFC Rectifier. IEEE Trans. Power Electron. 2022, 37, 7871–7882. [Google Scholar] [CrossRef]
- Luo, H.; Xu, J.; He, D.; Sha, J. Pulse Train Control Strategy for CCM Boost PFC Converter with Improved Dynamic Response and Unity Power Factor. IEEE Trans. Ind. Electron. 2020, 67, 10377–10387. [Google Scholar] [CrossRef]
- da Silva Fischer, G.; Rech, C.; de Novaes, Y.R. Extensions of Leading-Edge Modulated One-Cycle Control for Totem-Pole Bridgeless Rectifiers. IEEE Trans. Power Electron. 2020, 35, 5447–5460. [Google Scholar] [CrossRef]
- Zhang, L.; Ruan, X.; Ren, X. One-Cycle Control for Electrolytic Capacitor-Less Second Harmonic Current Compensator. IEEE Trans. Power Electron. 2018, 33, 1724–1739. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Z.; Song, D.; Wang, S.; Zhang, Z.; Ren, X.; Chen, Q. SR Control with Zero Current Detection Delay Compensation for GaN CRM Totem-Pole PFC Rectifier. IEEE Trans. Power Electron. 2023, 38, 7059–7068. [Google Scholar] [CrossRef]
- Panda, A.K.; Mohanty, P.R.; Patnaik, N.; Penthia, T. Closed-Loop-Controlled Cascaded Current-Controlled Dynamic Evolution Control-Based Voltage-Doubler PFC Converter for Improved Dynamic Performance. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1884–1891. [Google Scholar] [CrossRef]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended State Observer-Based Sliding-Mode Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2017, 64, 22–31. [Google Scholar] [CrossRef]
- Echalih, S.; Abouloifa, A.; Lachkar, I.; Hekss, Z.; Aroudi, A.E.; Giri, F.; Al-Numay, M.S. Nonlinear Control Design and Stability Analysis of Single Phase Half Bridge Interleaved Buck Shunt Active Power Filter. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 2117–2128. [Google Scholar] [CrossRef]
- Mejia-Ruiz, G.E.; Paternina, M.R.A.; de la O Serna, J.A.; Zamora-Mendez, A. O Splines-Based Fixed-Frequency Integral Sliding-Mode Controller for PFC Rectifier. IEEE Trans. Power Electron. 2023, 38, 9448–9458. [Google Scholar] [CrossRef]
- Mallik, A.; Lu, J.; Khaligh, A. Sliding Mode Control of Single-Phase Interleaved Totem-Pole PFC for Electric Vehicle Onboard Chargers. IEEE Trans. Veh. Technol. 2018, 67, 8100–8109. [Google Scholar] [CrossRef]
- Sadilek, T.; Kumar, M.; Jang, Y.; Barbosa, P.; Husain, I. A Low-THD Two-Switch PFC DCM Boost Rectifier for Aviation Applications. IEEE Trans. Transp. Electrif. 2020, 6, 1755–1766. [Google Scholar] [CrossRef]
- Li, S.; Lu, W.; Yan, S.; Zhao, Z. Improving Dynamic Performance of Boost PFC Converter Using Current-Harmonic Feedforward Compensation in Synchronous Reference Frame. IEEE Trans. Ind. Electron. 2020, 67, 4857–4866. [Google Scholar] [CrossRef]
- Lu, W.; Han, J.; Li, S.; Iu, H.H.-C. Mitigating Line Frequency Instability of Boost PFC Converter Under Proportional Outer-Voltage Loop with Additional Third Current-Harmonic Feedforward Compensation. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 4528–4541. [Google Scholar] [CrossRef]
- Chen, H.-C.; Lan, Y.-C. Multiloop Control with Two Duty-Ratio Feedforward Current Loops via Sensing Series-Capacitor Current for Voltage Doubler PFC Converter. IEEE Trans. Ind. Electron. 2023, 70, 11185–11193. [Google Scholar] [CrossRef]
- Liu, J.; Sun, X.; Ren, B.; Song, W.; Wheeler, P. Strong Adaptability Control Based on Dual-Division-Summation Current Control for an LCL-Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2022, 37, 14157–14172. [Google Scholar] [CrossRef]
- Thentral, T.M.T.; Vijayakumar, K.; Usha, S.; Palanisamy, R.; Babu, T.S.; Alhelou, H.H.; Al-Hinai, A. Development of Control Techniques Using Modified Fuzzy Based SAPF for Power Quality Enhancement. IEEE Access 2021, 9, 68396–68413. [Google Scholar] [CrossRef]
- Sha, D.; Zhang, D.; Zhang, J. A Single-Stage Dual-Active-Bridge AC–DC Converter Employing Mode Transition Based on Real-Time Calculation. IEEE Trans. Power Electron. 2021, 36, 10081–10088. [Google Scholar] [CrossRef]
- Siu, K.K.-M.; He, Y.; Ho, C.N.M.; Chung, H.S.-H.; Li, R.T.-H. Advanced Digital Controller for Improving Input Current Quality of Integrated Active Virtual Ground-Bridgeless PFC. IEEE Trans. Power Electron. 2019, 34, 3921–3936. [Google Scholar] [CrossRef]
- Lee, M.; Kim, J.-W.; Lai, J.-S. Digital-Based Critical Conduction Mode Control for Three-Level Boost PFC Converter. IEEE Trans. Power Electron. 2020, 35, 7689–7701. [Google Scholar] [CrossRef]
- Kim, J.; Won, J. Optimal Switching Method Using Variable Additional On-Time Control for CRM-Operated Multicell Series-Parallel Converter. IEEE Trans. Ind. Electron. 2024, 71, 409–418. [Google Scholar] [CrossRef]
- Park, M.-H.; Baek, J.; Jeong, Y.; Moon, G.-W. An Interleaved Totem-Pole Bridgeless Boost PFC Converter with Soft-Switching Capability Adopting Phase-Shifting Control. IEEE Trans. Power Electron. 2019, 34, 10610–10618. [Google Scholar] [CrossRef]
- Chan, C.-Y. Power Factor Correction Based on Adaptive Modified Current-Mode Control Approach. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1462–1466. [Google Scholar] [CrossRef]
- Yin, Y.; Liu, J.; Luo, W.; Wu, L.; Vazquez, S.; Leon, J.I.; Franquelo, L.G. Adaptive Control for Three-Phase Power Converters with Disturbance Rejection Performance. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 674–685. [Google Scholar] [CrossRef]
- Mishra, D.; Singh, B.; Panigrahi, B.K. Adaptive Current Control for a Bidirectional Interleaved EV Charger with Disturbance Rejection. IEEE Trans. Ind. Appl. 2021, 57, 4080–4090. [Google Scholar] [CrossRef]
- Leibl, M.; Kolar, J.W.; Deuringer, J. Sinusoidal Input Current Discontinuous Conduction Mode Control of the VIENNA Rectifier. IEEE Trans. Power Electron. 2017, 32, 8800–8812. [Google Scholar] [CrossRef]
- Sun, B. Power Factor Correction Using Peak Current-Mode Control. Analog Des. J. 2023, 89, 26–30. [Google Scholar]
- CoolGaNTM Totem-Pole PFC Design Guide and Power Loss Modeling. Available online: https://www.infineon.com/dgdl/Infineon-Design_guide_Gallium_Nitride-CoolGaN_totem-pole_PFC_power_loss_modeling-ApplicationNotes-v01_00-EN.pdf?fileId=5546d4626d82c047016d95daec4a769a (accessed on 14 November 2023).
- Hart, D.W. Power Electronics; McGraw-Hill Education; McGraw-Hill: New York, NY, USA, 2011; ISBN 978-0-07-128930-6. [Google Scholar]
- Ziegler, S.; Woodward, R.C.; Iu, H.H.-C.; Borle, L.J. Current Sensing Techniques: A Review. IEEE Sens. J. 2009, 9, 354–376. [Google Scholar] [CrossRef]
- Parsa Sirat, A.; Parkhideh, B. Current Sensor Integration Issues with Wide-Bandgap Power Converters. Sensors 2023, 23, 6481. [Google Scholar] [CrossRef] [PubMed]
- Xiao, C.; Zhao, L.; Asada, T.; Odendaal, W.G.; van Wyk, J.D. An Overview of Integratable Current Sensor Technologies. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; Volume 2, pp. 1251–1258. [Google Scholar]
- Brkovic, M.; Cuk, S. Input Current Shaper Using Cuk Converter. In Proceedings of the Fourteenth International Telecommunications Energy Conference—INTELEC’92, Washington, DC, USA, 4–8 October 1992; pp. 532–539. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shunt | Current Transformer | Hall Effect | |
|---|---|---|---|
| Accuracy | 0.1–2% | 0.1–1% | 0.5–5% |
| Isolation | Not inherently isolated | Isolated | Isolated |
| Bandwidth | kHz–MHz | kHz–MHz | kHz |
| Cost | low | Moderate | high |
| Circuit Invasion | Invasive | Non-invasive | Non-invasive |
| Temperature Drift (ppm/K) | 25–300 | <100 | 50–1000 |
| Power Loss | mW–W | mW | mW |
| DC Capability | yes | No | Yes |
| Weaknesses | Requires careful design due to its non-isolated nature; high power losses | Current saturation; inability to measure DC current | Susceptible to EMI; high temperature drift; low bandwidth |
| ) | Grid Frequency (Hz) | Input Inductor (mH) | Output Capacitor (μF) | Output Voltage (V) | Power Rating (W) | Switching Frequency (kHz) | Simulation Step/Sampling Time (μs) |
|---|---|---|---|---|---|---|---|
| 240 | 50 | 1 | 100 | 600 | 2000 | 100 | 0.1 |
| Switch Type | Part Number | Manufacturer | |||
|---|---|---|---|---|---|
| Silicon Carbide MOSFET | AIMW120R080M1 | Infineon | 1200 V | 33 A | 80 mΩ |
| Method #1 | Method #2 | Method #3 | |
|---|---|---|---|
| 7.76 | 91.45 | 8.53 | |
| THD at steady state (%) | 4.42 | 4.43 | 4.42 |
| THD settling time (cycles) | 2 | 11 | 2 |
| Number of current sensors | 2 | 1 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsalemi, A.; Massoud, A. Effortless Totem-Pole Converter Control Using a Power Factor Correction Peak Current-Mode Controller. Sensors 2024, 24, 4910. https://doi.org/10.3390/s24154910
Alsalemi A, Massoud A. Effortless Totem-Pole Converter Control Using a Power Factor Correction Peak Current-Mode Controller. Sensors. 2024; 24(15):4910. https://doi.org/10.3390/s24154910
Chicago/Turabian StyleAlsalemi, Abdulazeez, and Ahmed Massoud. 2024. "Effortless Totem-Pole Converter Control Using a Power Factor Correction Peak Current-Mode Controller" Sensors 24, no. 15: 4910. https://doi.org/10.3390/s24154910
APA StyleAlsalemi, A., & Massoud, A. (2024). Effortless Totem-Pole Converter Control Using a Power Factor Correction Peak Current-Mode Controller. Sensors, 24(15), 4910. https://doi.org/10.3390/s24154910