
A Novel Design of a Torsional Shape Memory Alloy Actuator for Active Rudder

 ,
,  , ,
, , 
Abstract
1. Introduction
2. Methodology
2.1. Experimental Procedure
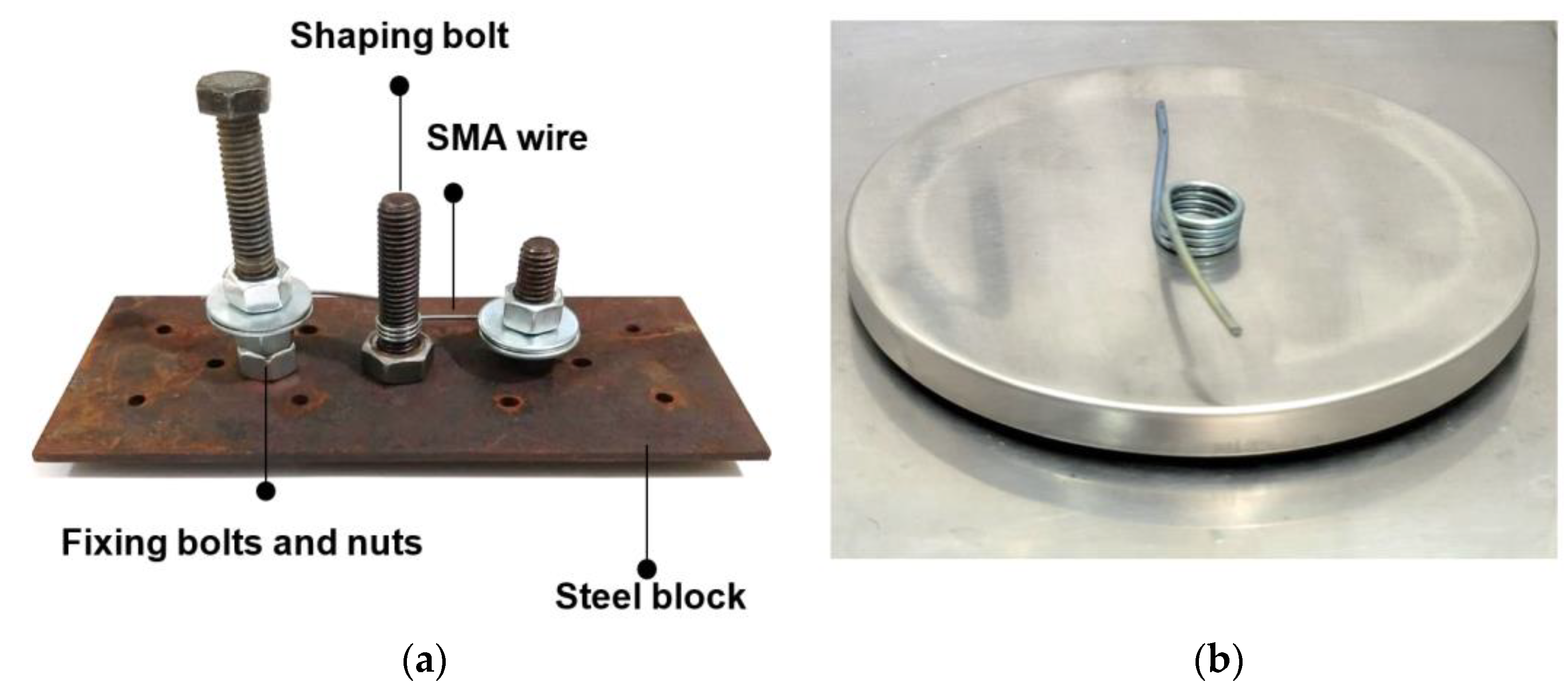
2.1.1. Material and Spring Manufacturing
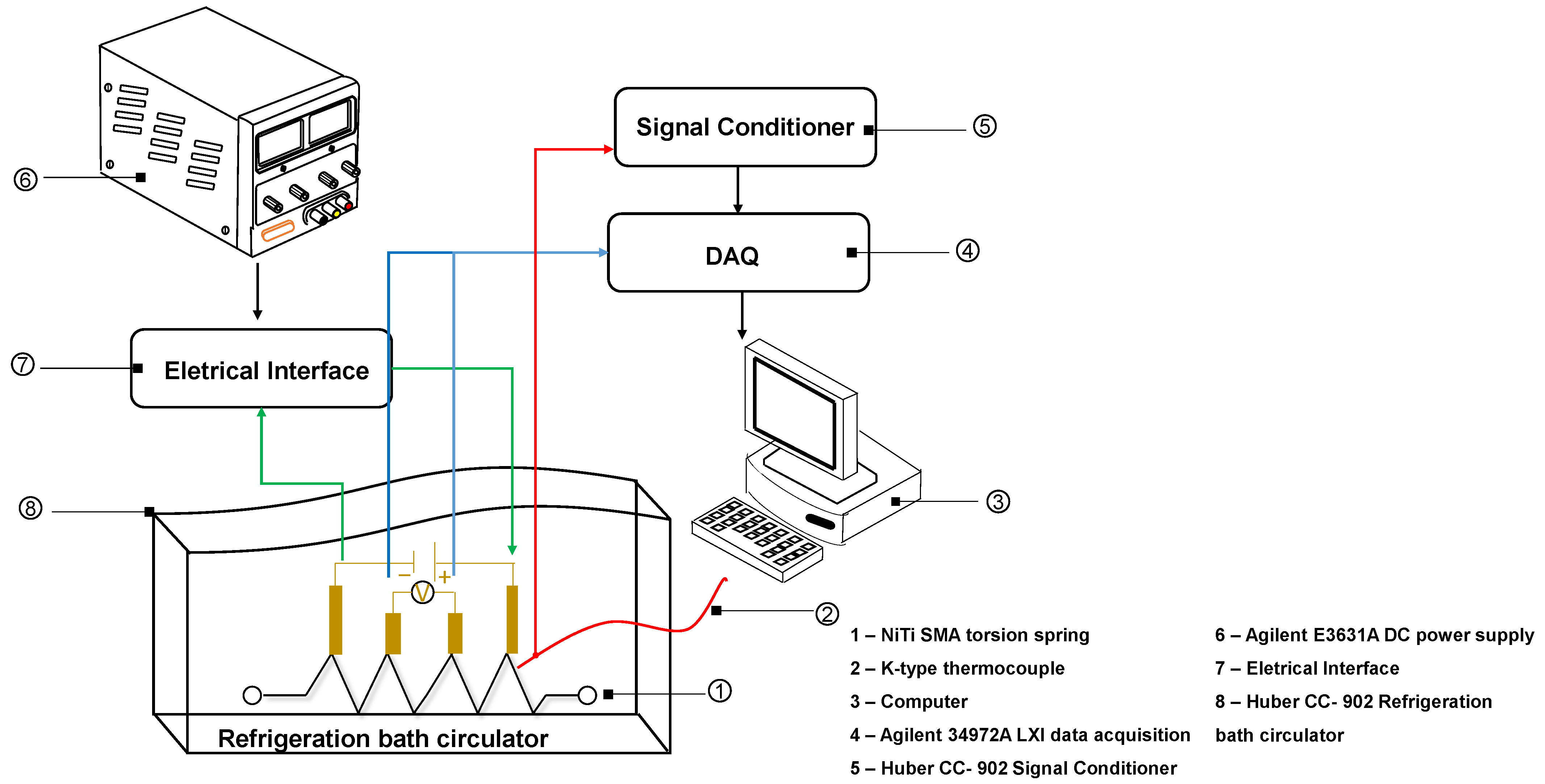
2.1.2. Thermal Characterization of the NiTi Wire and NiTi Torsion Spring
2.1.3. Quasi-Static Characterization of the NiTi Torsion Spring
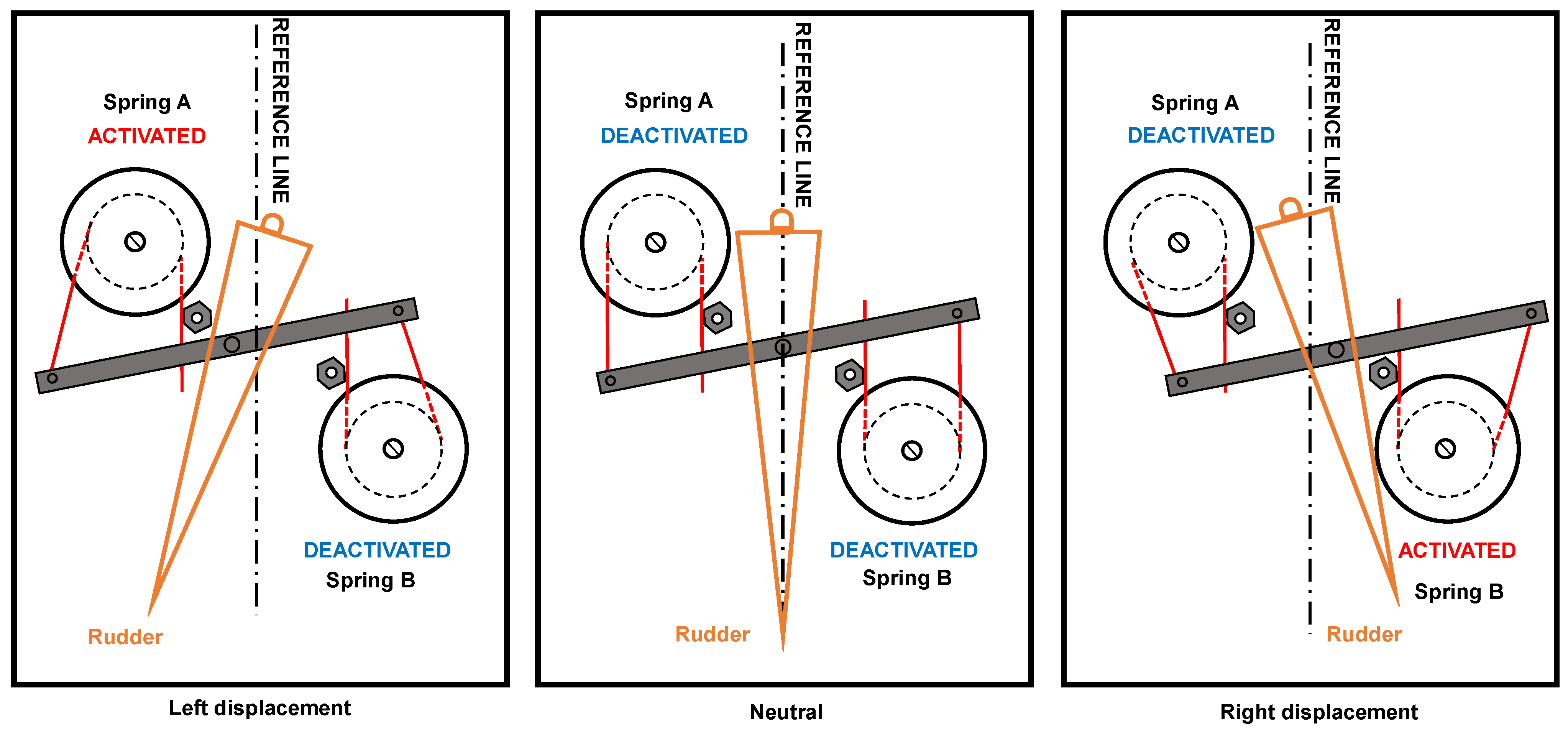
2.1.4. Design Concept of SMA Torsion Actuator
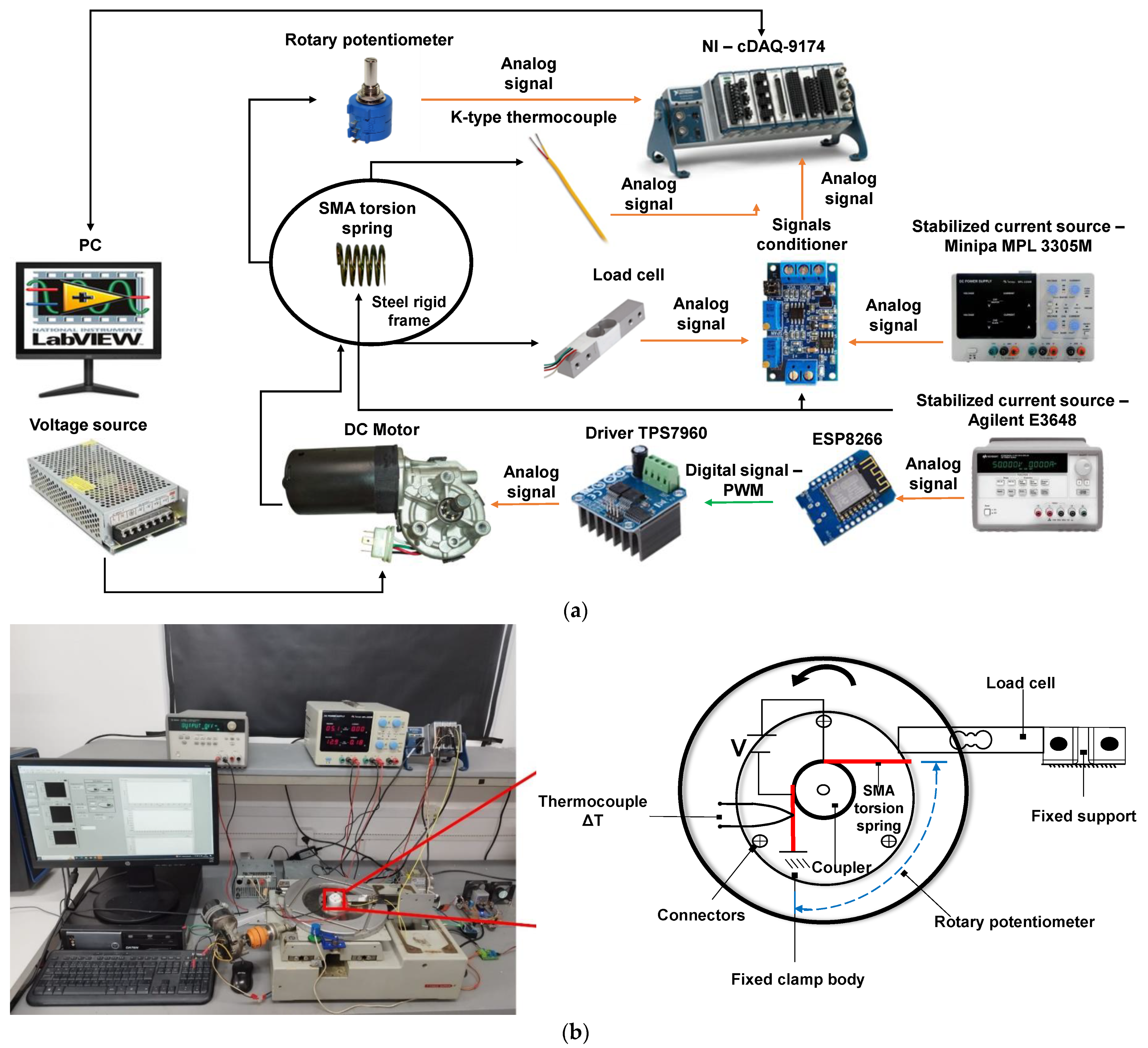
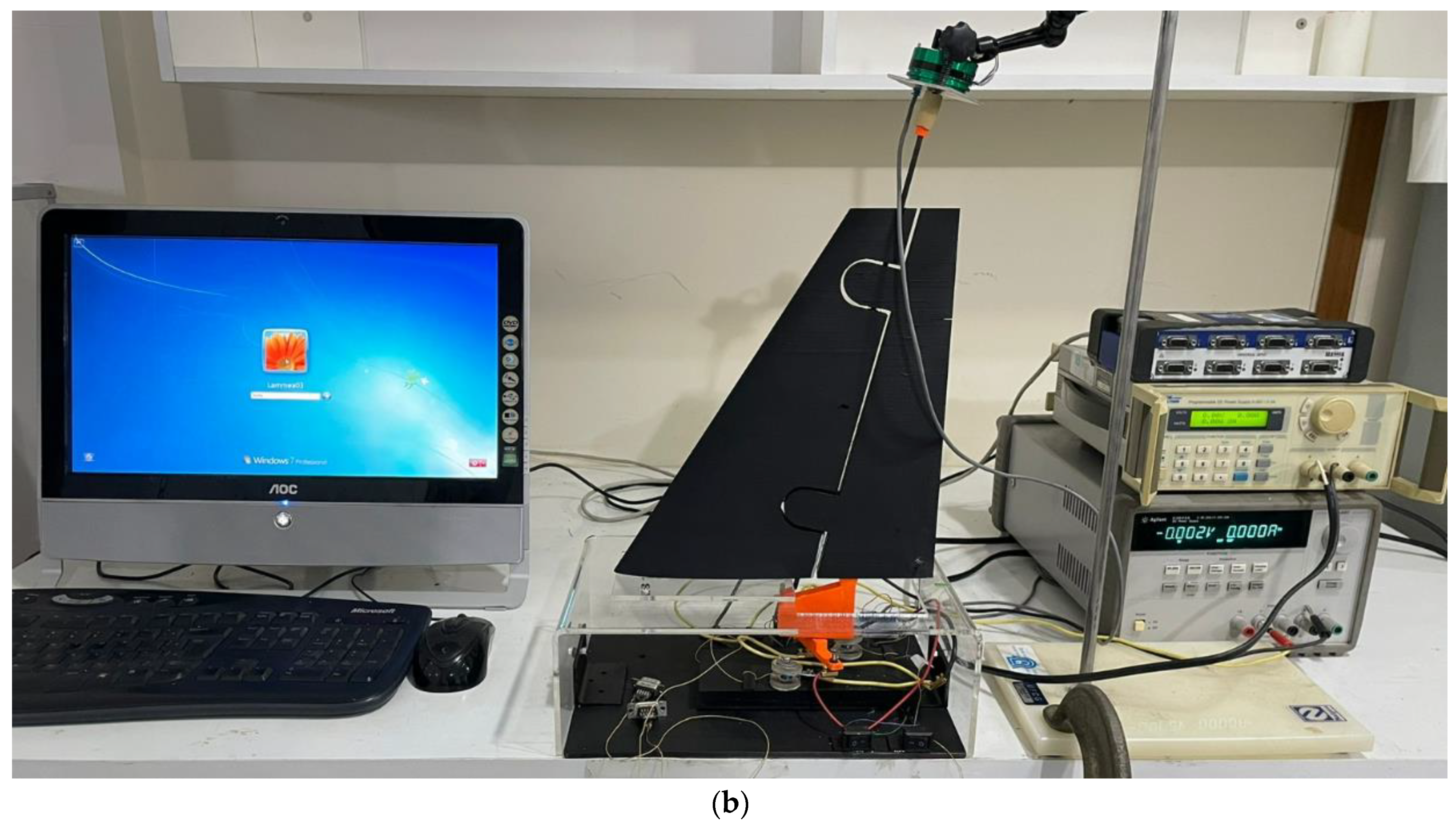
2.1.5. Fabrication of Functional Prototype and Experimental Setup
3. Results
3.1. Experimental Analysis
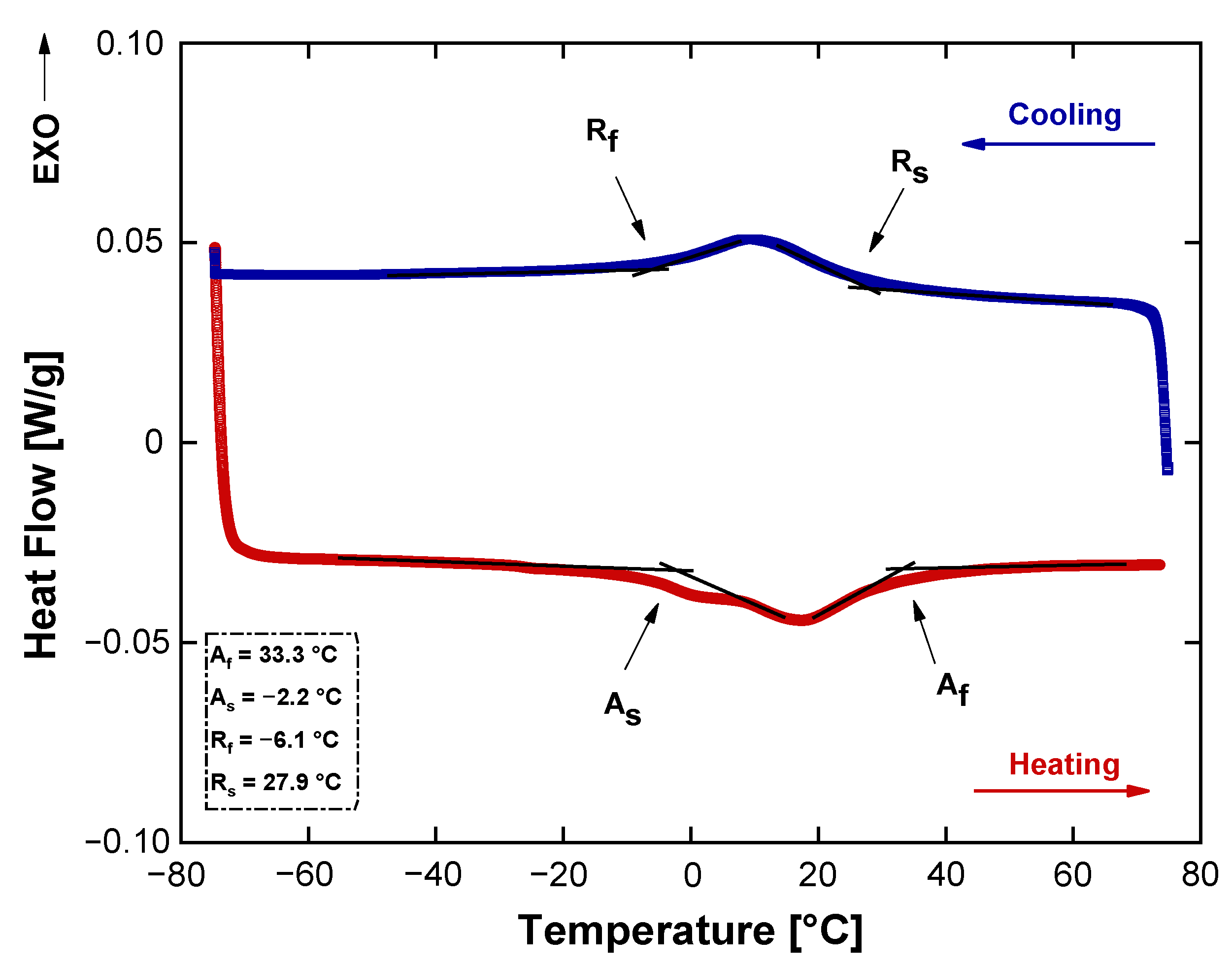
3.1.1. Transformation Temperatures
3.1.2. Quasi-Static Tests
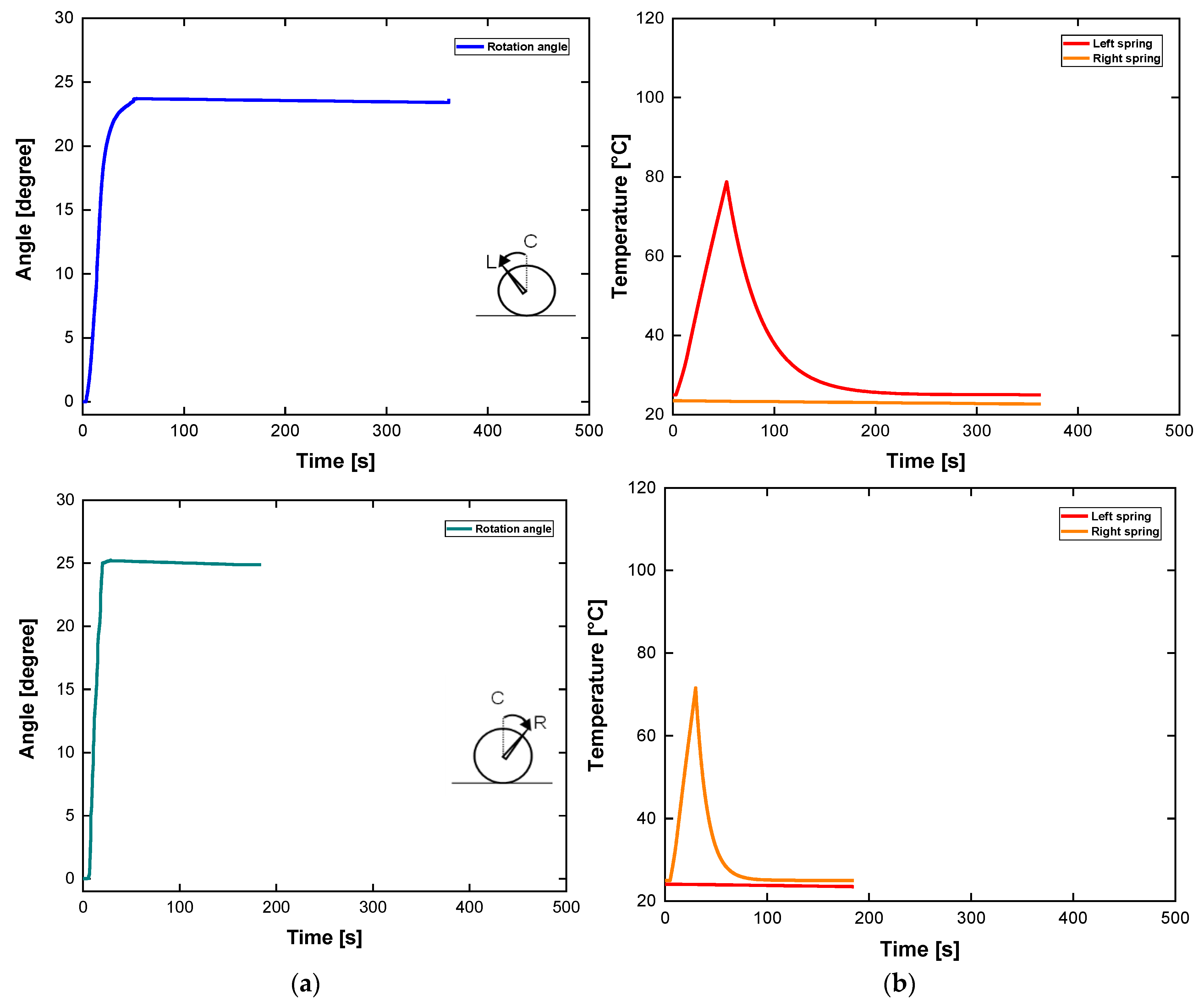
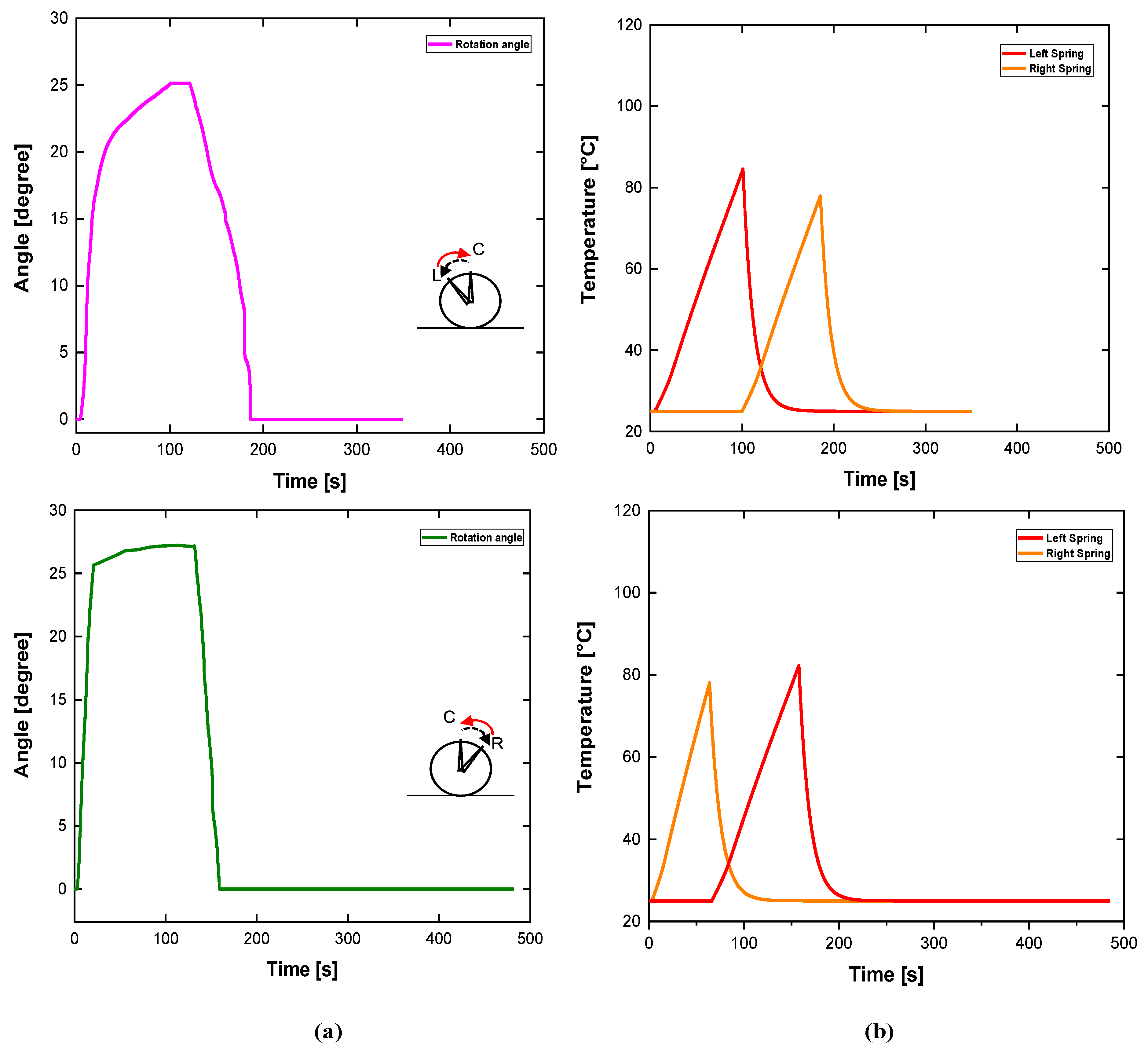
3.1.3. Actuation Test of the Active Rudder
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A Review of Shape Memory Alloy Research, Applications and Opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Sobczyk, M.; Wiesenhütter, S.; Noennig, J.R.; Wallmersperger, T. Smart Materials in Architecture for Actuator and Sensor Applications: A Review. J. Intell. Mater. Syst. Struct. 2022, 33, 379–399. [Google Scholar] [CrossRef]
- Shreekrishna, S.; Nachimuthu, R.; Nair, V.S. A Review on Shape Memory Alloys and Their Prominence in Automotive Technology. J. Intell. Mater. Syst. Struct. 2022, 34, 499–524. [Google Scholar] [CrossRef]
- Costanza, G.; Tata, M.E. Shape Memory Alloys for Aerospace, Recent Developments, and New Applications: A Short Review. Materials 2020, 13, 1856. [Google Scholar] [CrossRef] [PubMed]
- Gangil, N.; Siddiquee, A.N.; Maheshwari, S. Towards Applications, Processing and Advancements in Shape Memory Alloy and Its Composites. J. Manuf. Process 2020, 59, 205–222. [Google Scholar] [CrossRef]
- Hasan, M.M.; Baxevanis, T. Structural Fatigue and Fracture of Shape Memory Alloy Actuators: Current Status and Perspectives. J. Intell. Mater. Syst. Struct. 2022, 33, 1475–1486. [Google Scholar] [CrossRef]
- Srivastava, R.; Alsamhi, S.H.; Murray, N.; Devine, D. Shape Memory Alloy-Based Wearables: A Review, and Conceptual Frameworks on HCI and HRI in Industry 4.0. Sensors 2022, 22, 6802. [Google Scholar] [CrossRef] [PubMed]
- Otsuka, K.; Wayman, C.M. Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Duerig, T.W.; Melton, K.N.; Stöckel, D. Engineering Aspects of Shape Memory Alloys; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Huang, W. On the Selection of Shape Memory Alloys for Actuators. Mater. Des. 2002, 23, 11–19. [Google Scholar] [CrossRef]
- Fumagalli, L.; Butera, F.; Coda, A. SmartFlex® NiTi Wires for Shape Memory Actuators. J. Mater. Eng. Perform. 2009, 18, 691–695. [Google Scholar] [CrossRef]
- Reynaerts, D.; Van Brussel, H. Design Aspects of Shape Memory Actuators. Mechatronics 1998, 8, 635–656. [Google Scholar] [CrossRef]
- Barbarino, S.; Saavedra-Flores, E.I.; Ajaj, R.M.; Dayyani, I.; Friswell, M.I. A review on shape memory alloys with applications to morphing aircraft. Smart Mater. Struct. 2014, 23, 063001. [Google Scholar] [CrossRef]
- Benafan, O.; Moholt, M.R.; Bass, M.; Mabe, J.H.; Nicholson, D.E.; Calkins, F.T. Recent Advancements in Rotary Shape Memory Alloy Actuators for Aeronautics. Shape Mem. SuperElast. 2019, 5, 415–428. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Han, M.-W.; Kim, T.J.Y.; Ahn, S.-H. An Overview of Shape Memory Alloy-Coupled Actuators and Robots. Soft Robot. 2017, 4, 3–15. [Google Scholar] [CrossRef] [PubMed]
- Petrini, L.; Migliavacca, F. Biomedical Applications of Shape Memory Alloys. J. Metall. 2011, 2011, 501483. [Google Scholar] [CrossRef]
- Kim, C.; Kim, G.; Lee, Y.; Lee, G.; Han, S.; Kang, D.; Koo, S.H.; Koh, J. Shape Memory Alloy Actuator-Embedded Smart Clothes for Ankle Assistance. Smart Mater. Struct. 2020, 29, 55003. [Google Scholar] [CrossRef]
- Stroud, H.; Hartl, D. Shape Memory Alloy Torsional Actuators: A Review of Applications, Experimental Investigations, Modeling, and Design. Smart Mater. Struct. 2020, 29, 113001. [Google Scholar] [CrossRef]
- Yuan, H.; Fauroux, J.; Chapelle, F.; Balandraud, X. A Review of Rotary Actuators Based on Shape Memory Alloys. J. Intell. Mater. Syst. Struct. 2017, 28, 1863–1885. [Google Scholar] [CrossRef]
- Aziz, S.; Spinks, G.M. Torsional Artificial Muscles. Mater. Horiz. 2020, 7, 667–693. [Google Scholar] [CrossRef]
- Hu, K.; Rabenorosoa, K.; Ouisse, M. A Review of SMA-Based Actuators for Bidirectional Rotational Motion: Application to Origami Robots. Front. Robot. AI 2021, 8, 678486. [Google Scholar] [CrossRef]
- Wahl, A.M. Mechanical Springs; McGraw Hill: New york, NY, USA, 1963. [Google Scholar]
- Carlson, H. Spring Designer’s Handbook. In Mechanical Engineering; CRC Press: Boca Raton, FL, USA, 1978. [Google Scholar]
- Budynas, R.G.; Nisbett, J.K. Shigley’s Mechanical Engineering Design; McGraw-Hill: New York, NY, USA, 2011; Volume 9. [Google Scholar]
- Kim, Y.S.; Song, Y.J.; Jeon, E.S. Numerical and Experimental Analysis of Torsion Springs Using NURBS Curves. Appl. Sci. 2020, 10, 2629. [Google Scholar] [CrossRef]
- Yoshida, E.; Kokaji, S.; Murata, S.; Kurokawa, H.; Tomita, K. Miniaturized Self-Reconfigurable System Using Shape Memory Alloy. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289), Kyongju, Republic of Korea, 17–21 October 1999; Volume 3, pp. 1579–1585. [Google Scholar]
- Salerno, M.; Tognarelli, S.; Quaglia, C.; Dario, P.; Menciassi, A. Anchoring Frame for Intra-Abdominal Surgery. Int. J. Rob. Res. 2013, 32, 360–370. [Google Scholar] [CrossRef]
- Sheng, J.; Desai, J.P. Design, Modeling and Characterization of a Novel Meso-Scale SMA-Actuated Torsion Actuator. Smart Mater. Struct. 2015, 24, 105005. [Google Scholar] [CrossRef]
- Sheng, J.; Gandhi, D.; Gullapalli, R.; Simard, J.M.; Desai, J.P. Development of a Meso-Scale SMA-Based Torsion Actuator for Image-Guided Procedures. IEEE Trans. Robot. 2017, 33, 240–248. [Google Scholar] [CrossRef] [PubMed]
- Ameduri, S.; Concilio, A. A Shape Memory Alloy Torsion Actuator for Static Blade Twist. J. Intell. Mater. Syst. Struct. 2019, 30, 2605–2626. [Google Scholar] [CrossRef]
- Ameduri, S.; Concilio, A.; Favaloro, N.; Pellone, L. A Shape Memory Alloy Application for Compact Unmanned Aerial Vehicles. Aerospace 2016, 3, 113021. [Google Scholar] [CrossRef]
- Khan, S.; Pydi, Y.S.; Prabu, S.S.M.; Palani, I.A.; Singh, P. Development and Actuation Analysis of Shape Memory Alloy Reinforced Composite Fin for Aerodynamic Application. Sens. Actuators A Phys. 2021, 331, 113012. [Google Scholar] [CrossRef]
- Davidson, F.M.; Liang, C.; Lobitz, D.W. Investigation of Torsional Shape Memory Alloy Actuators. In Proceedings of the Smart Structures and Materials 1996: Smart Structures and Integrated Systems, San Diego, CA, USA, 25–29 February 1996; Volume 2717, pp. 672–682. [Google Scholar]
- Jardine, A.P.; Bartley-Cho, J.D.; Flanagan, J.S. Improved Design and Performance of the SMA Torque Tube for the DARPA Smart Wing Program. In Proceedings of the Smart Structures and Materials 1999: Industrial and Commercial Applications of Smart Structures Technologies, Newport Beach, CA, USA, 1 March 1999; Volume 3674, pp. 260–269. [Google Scholar]
- Prahlad, H.; Chopra, I. Modeling and Experimental Characterization of SMA Torsional Actuators. J. Intell. Mater. Syst. Struct. 2007, 18, 29–38. [Google Scholar] [CrossRef]
- Kennedy, D.K.; Straub, F.K.; Schetky, L.M.; Chaudhry, Z.; Roznoy, R. Development of an SMA Actuator for In-Flight Rotor Blade Tracking. J. Intell. Mater. Syst. Struct. 2004, 15, 235–248. [Google Scholar] [CrossRef]
- Mabe, J.H.; Calkins, F.T.; Ruggeri, R.T. Full-Scale Flight Tests of Aircraft Morphing Structures Using SMA Actuators. In Proceedings of the Active and Passive Smart Structures and Integrated Systems, San Diego, CA, USA, 18–22 March 2007; Volume 6525, p. 65251C. [Google Scholar]
- Icardi, U.; Ferrero, L. Preliminary Study of an Adaptive Wing with Shape Memory Alloy Torsion Actuators. Mater. Des. 2009, 30, 4200–4210. [Google Scholar] [CrossRef]
- Benafan, O.; Gaydosh, D.J. High Temperature Shape Memory Alloy Ni50. 3Ti29. 7Hf20 Torque Tube Actuators. Smart Mater. Struct. 2017, 26, 95002. [Google Scholar] [CrossRef]
- Hayrettin, C.; Karakoc, O.; Karaman, I.; Mabe, J.H.; Santamarta, R.; Pons, J. Two Way Shape Memory Effect in NiTiHf High Temperature Shape Memory Alloy Tubes. Acta Mater. 2019, 163, 1–13. [Google Scholar] [CrossRef]
- Sansone, M.; Ameduri, S.; Concilio, A.; Cestino, E. Understanding Shape Memory Alloy Torsional Actuators: From the Conceptual to the Preliminary Design. Actuators 2022, 11, 81. [Google Scholar] [CrossRef]
- Casati, R.; Vedani, M.; Tuissi, A. Thermal Cycling of Stress-Induced Martensite for High-Performance Shape Memory Effect. Scr. Mater. 2014, 80, 13–16. [Google Scholar] [CrossRef]
- Tobushi, H.; Pieczyska, E.; Miyamoto, K.; Mitsui, K. Torsional Deformation Characteristics of TiNi SMA Tape and Application to Rotary Actuator. J. Alloys Compd. 2013, 577, S745–S748. [Google Scholar] [CrossRef]
- Follador, M.; Cianchetti, M.; Arienti, A.; Laschi, C. A General Method for the Design and Fabrication of Shape Memory Alloy Active Spring Actuators. Smart Mater. Struct. 2012, 21, 115029. [Google Scholar] [CrossRef]
- Heidari, B.; Kadkhodaei, M.; Barati, M.; Karimzadeh, F. Fabrication and Modeling of Shape Memory Alloy Springs. Smart Mater. Struct. 2016, 25, 125003. [Google Scholar] [CrossRef]
- Enemark, S.; Santos, I.F.; Savi, M.A. Modelling, Characterisation and Uncertainties of Stabilised Pseudoelastic Shape Memory Alloy Helical Springs. J. Intell. Mater. Syst. Struct. 2016, 27, 2721–2743. [Google Scholar] [CrossRef]
- Asl, F.J.; Kadkhodaei, M.; Karimzadeh, F. The Effects of Shape-Setting on Transformation Temperatures of Pseudoelastic Shape Memory Alloy Springs. J. Sci. Adv. Mater. Devices 2019, 4, 568–576. [Google Scholar]
- ASTM F2004-17; Standard Test Method for Transformation Temperature of Nickel-Titanium Alloys by Thermal Analysis. ASTM International: West Conshohocken, PA, USA, 2024.
- Gonzalez, C.H.; de Quadros, N.F.; de Araújo, C.J.; Morin, M.; Guénin, G. Coupled Stress-Strain and Electrical Resistivity Measurements on Copper Based Shape Memory Single Crystals. Mater. Res. 2004, 7, 305–311. [Google Scholar] [CrossRef]
- Senko, R.; Almeida, V.S.; dos Reis, R.P.B.; Oliveira, A.G.; Silva, A.A.; Rodrigues, M.C.; de Carvalho, L.H.; Lima, A.G.B. Passive Attenuation of Mechanical Vibrations with a Superelastic SMA Bending Springs: An Experimental Investigation. Sensors 2022, 22, 3195. [Google Scholar] [CrossRef] [PubMed]
- dos Reis, R.P.B.; Ferreira-Oliveira, J.R.; Grassi, E.N.D.; da Rocha Souto, C.; de Araújo, C.J. Measurement of Phase Transformation Temperatures in Shape Memory Alloys Using a Peltier Thermoelectric Apparatus. Int. J. Thermophys. 2022, 43, 50. [Google Scholar] [CrossRef]
- Khalil-Allafi, J.; Eggeler, G.; Dlouhy, A.; Schmahl, W.W.; Somsen, C. On the Influence of Heterogeneous Precipitation on Martensitic Transformations in a Ni-Rich NiTi Shape Memory Alloy. Mater. Sci. Eng. A 2004, 378, 148–151. [Google Scholar] [CrossRef]
- Sadiq, H.; Wong, M.-B.; Al-Mahaidi, R.; Zhao, X.L. The Effects of Heat Treatment on the Recovery Stresses of Shape Memory Alloys. Smart Mater. Struct. 2010, 19, 35021. [Google Scholar] [CrossRef]
- Huang, X.; Liu, Y. Effect of Annealing on the Transformation Behavior and Superelasticity of NiTi Shape Memory Alloy. Scr. Mater. 2001, 45, 153–160. [Google Scholar] [CrossRef]
- Lach, C.L.; Turner, T.L.; Taminger, K.M.; Shenoy, R.N. Effects of Thermomechanical History on the Tensile Behavior of Nitinol Ribbon. In Smart Structures and Materials 2002: Active Materials: Behavior and Mechanics; Lynch, C.S., Ed.; SPIE: Bellingham, WA, USA, 2002; pp. 323–334. [Google Scholar]
- Shahmir, H.; Nili-Ahmadabadi, M.; Naghdi, F. Superelastic Behavior of Aged and Thermomechanical Treated NiTi Alloy at Af+10°C. Mater. Des. 2011, 32, 365–370. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Mass | m | 2.02 | g |
| Wire diameter | d | 1.5 | mm |
| Mean diameter | D | 10.5 | mm |
| No. of active coils | n | 3 | N/A |
| Spring index | - | 7 | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lima, F.S.; Souto, C.R.; Oliveira, A.G.; Silvestre, A.D.; Alves, R.M.N.; Santos, S.E.S.; Gomez, R.S.; Brito, G.R.F.; Bezerra, A.L.D.; Santana, D.S.M.; et al. A Novel Design of a Torsional Shape Memory Alloy Actuator for Active Rudder. Sensors 2024, 24, 4973. https://doi.org/10.3390/s24154973
Lima FS, Souto CR, Oliveira AG, Silvestre AD, Alves RMN, Santos SES, Gomez RS, Brito GRF, Bezerra ALD, Santana DSM, et al. A Novel Design of a Torsional Shape Memory Alloy Actuator for Active Rudder. Sensors. 2024; 24(15):4973. https://doi.org/10.3390/s24154973
Chicago/Turabian StyleLima, Felipe S., Cícero R. Souto, Andersson G. Oliveira, Alysson D. Silvestre, Railson M. N. Alves, Sebastião E. S. Santos, Ricardo S. Gomez, Glauco R. F. Brito, André L. D. Bezerra, Diogenes S. M. Santana, and et al. 2024. "A Novel Design of a Torsional Shape Memory Alloy Actuator for Active Rudder" Sensors 24, no. 15: 4973. https://doi.org/10.3390/s24154973
APA StyleLima, F. S., Souto, C. R., Oliveira, A. G., Silvestre, A. D., Alves, R. M. N., Santos, S. E. S., Gomez, R. S., Brito, G. R. F., Bezerra, A. L. D., Santana, D. S. M., & Lima, A. G. B. (2024). A Novel Design of a Torsional Shape Memory Alloy Actuator for Active Rudder. Sensors, 24(15), 4973. https://doi.org/10.3390/s24154973