
High-Resolution Rainfall Estimation Using Ensemble Learning Techniques and Multisensor Data Integration


Abstract
:1. Introduction
2. Materials and Methods
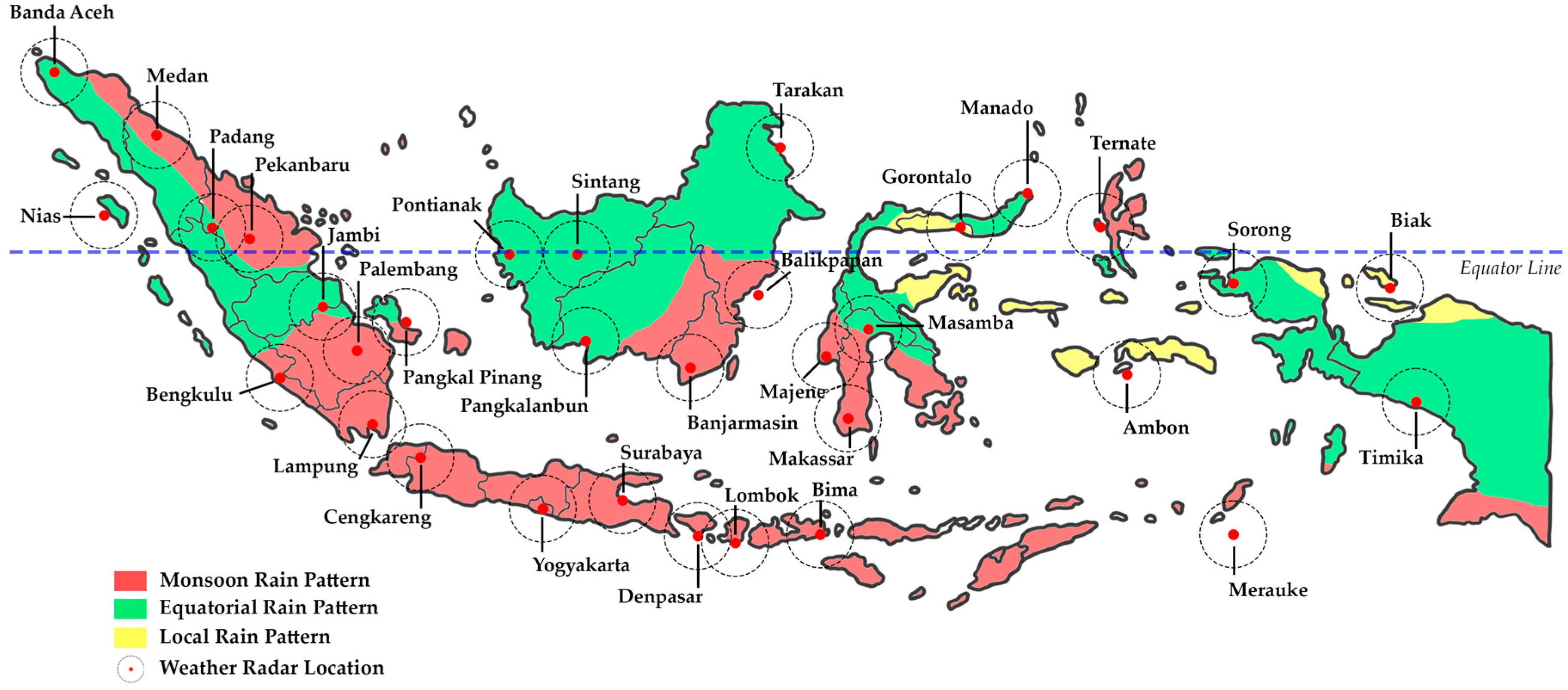
2.1. Study Area
2.2. Data
2.3. Data Preprocessing
2.4. Bias Correction Strategy
2.5. Integration of Weather Radar Data
2.6. Ensemble Learning Approach
2.7. Evaluation of Estimation Results
3. Results and Discussion
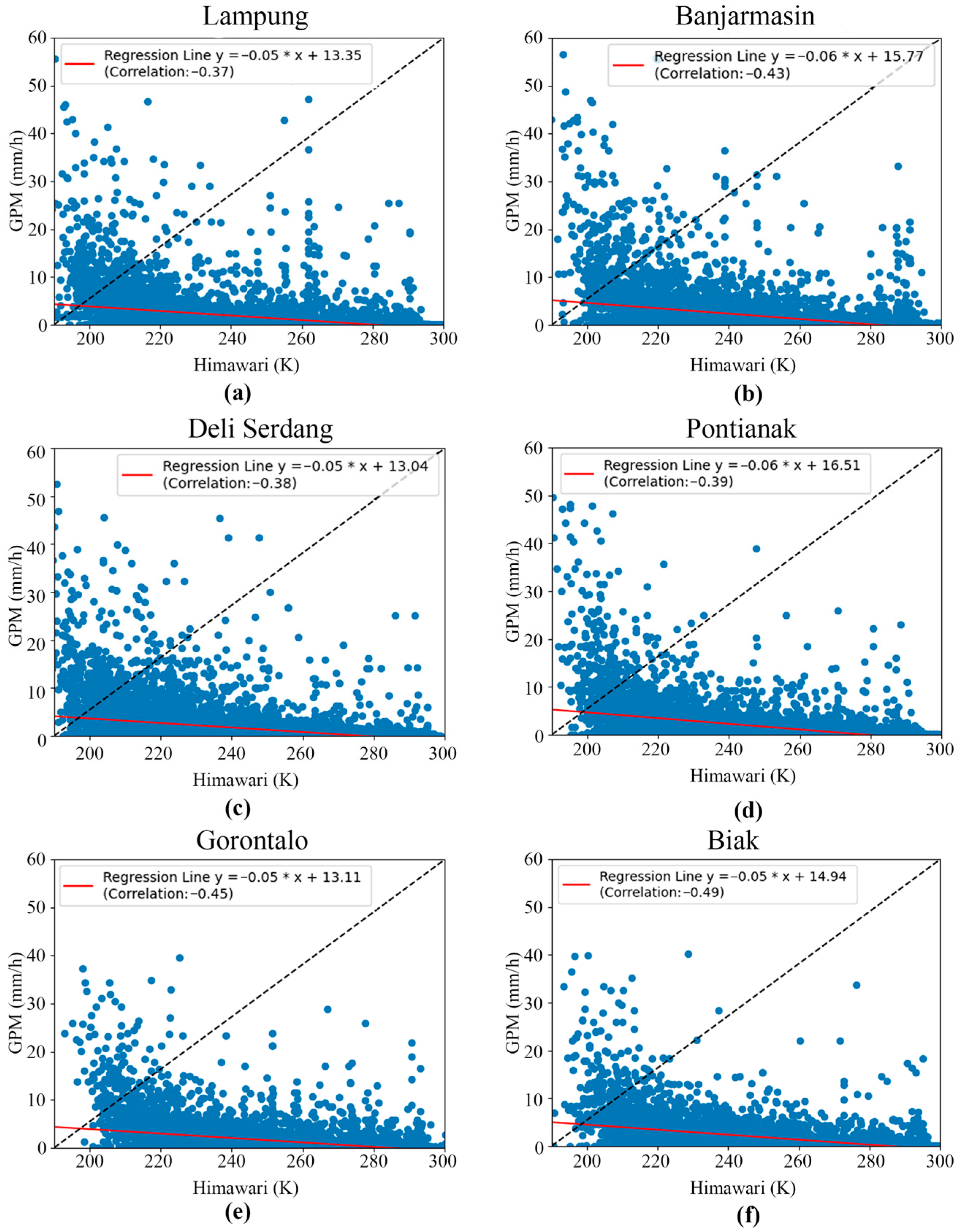
3.1. Data Correlation
3.2. Bias Correction Result
3.3. Weather Radar Network
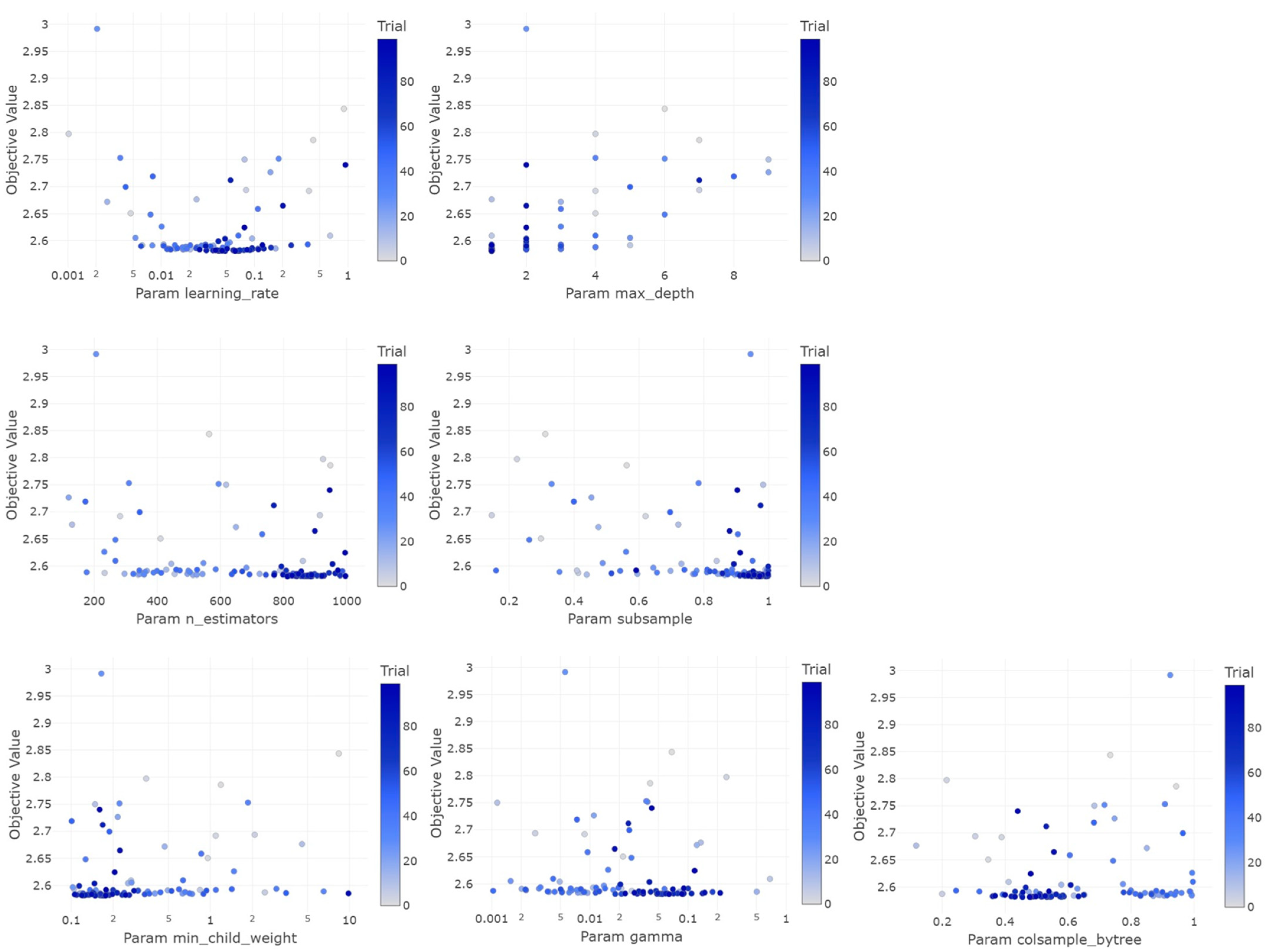
3.4. Hyperparameter Tuning Results
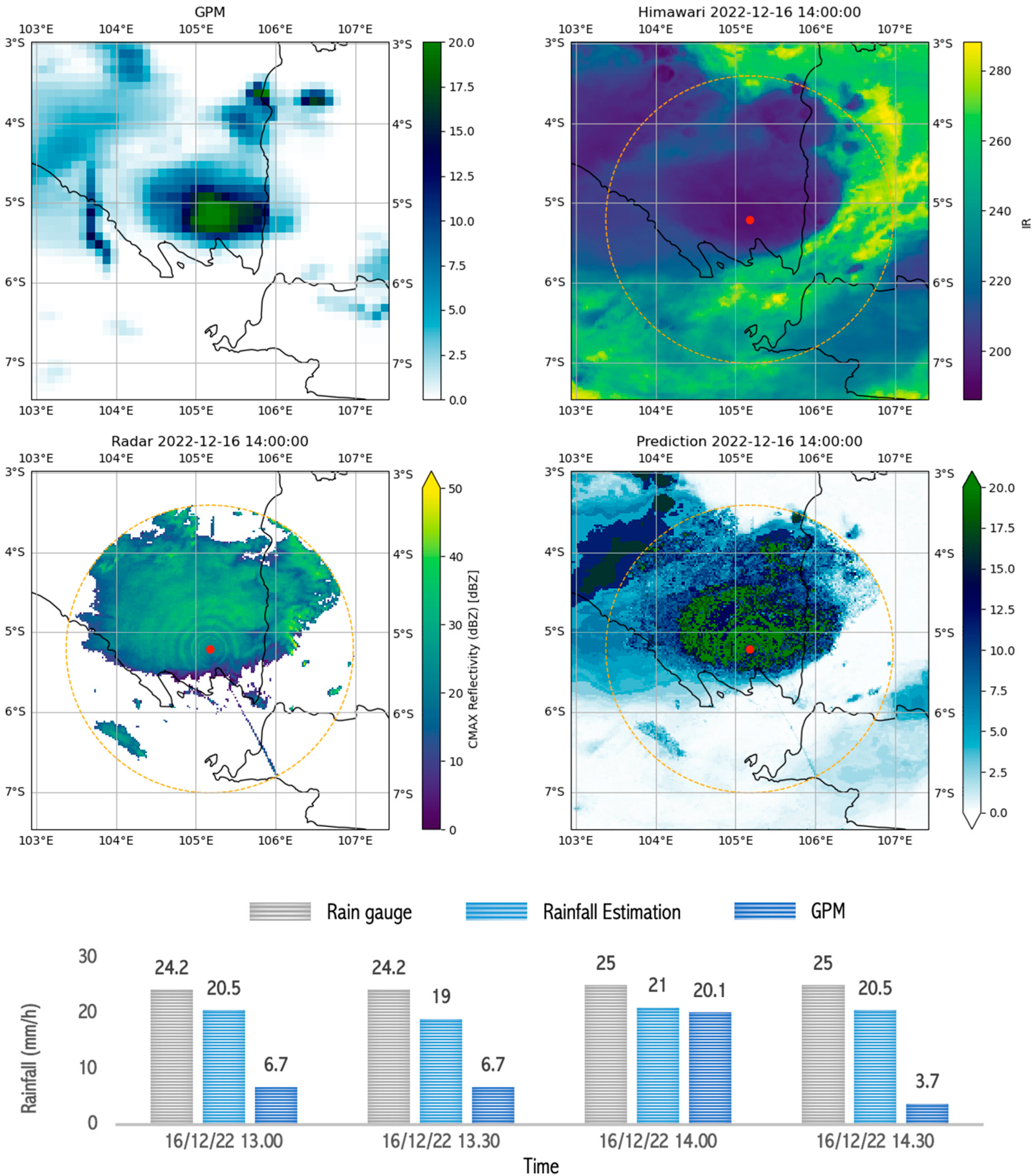
3.5. Product and Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Belgaman, H.A.; Ichiyanagi, K.; Suwarman, R.; Tanoue, M.; Aldrian, E.; Utami, A.I.; Kusumaningtyas, S.D. Characteristics of seasonal precipitation isotope variability in Indonesia. Hydrol. Res. Lett. 2017, 11, 92–98. [Google Scholar] [CrossRef]
- Hendon, H.H. Indonesian Rainfall Variability: Impacts of ENSO and Local Air-Sea Interaction. Am. Meteorol. Soc. 2003, 16, 1775–1790. [Google Scholar] [CrossRef]
- Pramuwardani, I.; Hartono; Sunarto; Sopaheluwakan, A. Indonesian rainfall variability during Western North Pacific and Australian monsoon phase related to convectively coupled equatorial waves. Arab. J. Geosci. 2018, 11, 673. [Google Scholar] [CrossRef]
- Marzuki, M.; Hashiguchi, H.; Yamamoto, M.K.; Mori, S.; Yamanaka, M.D. Regional variability of raindrop size distribution over Indonesia. Ann. Geophys. 2013, 31, 1941–1948. [Google Scholar] [CrossRef]
- Narulita, I.; Ningrum, W. Extreme flood event analysis in Indonesia based on rainfall intensity and recharge capacity. IOP Conf. Ser. Earth Environ. Sci. 2018, 118, 012045. [Google Scholar] [CrossRef]
- Ikhwali, M.F.; Nur, S.; Darmansyah, D.; Hamdan, A.M.; Ersa, N.S.; Aida, N.; Yusra, A.; Satria, A. A review of climate change studies on paddy agriculture in Indonesia. IOP Conf. Ser. Earth Environ. Sci. 2022, 1116, 012052. [Google Scholar] [CrossRef]
- Kirono, D.G.C.; Tapper, N.J. Enso rainfall variability and impacts on crop production in Indonesia. Phys. Geogr. 1999, 20, 508–519. [Google Scholar] [CrossRef]
- Pambudi, A.S. Overview and evaluation of the Indonesia’s water resources management policies for food security. Indones. J. Appl. Environ. Stud. 2021, 2, 84–93. [Google Scholar] [CrossRef]
- Adibroto, T.A.; Wijayanti, P.; Adhi, R.P.; Nugroho, R. Preliminary study on socio-economic aspect towards Jakarta climate resilient (case study: Cengkareng District, West Jakarta and Penjaringan District, North Jakarta). IOP Conf. Ser. Earth Environ. Sci. 2019, 314, 012035. [Google Scholar] [CrossRef]
- Chayyani, N.R.; Gravitiani, E.; Suryanto. Socio-economic vulnerability and losses of flood in Lampung, Indonesia. IOP Conf. Ser. Earth Environ. Sci. 2020, 423, 012054. [Google Scholar] [CrossRef]
- Tondang, Y.M.; Situmorang, M.; Ikhsan, T.; Darmawan, Y. Accuracy of Weather Radar Products for Rainfall Estimation in North Sumatra Region. J. Pengkaj. Ilmu Pembelajaran Mat. IPA IKIP Mataram 2023, 11, 351–357. [Google Scholar] [CrossRef]
- Rahmawati, N. Space-time variogram for daily rainfall estimates using rain gauges and satellite data in mountainous tropical Island of Bali, Indonesia (Preliminary Study). J. Hydrol. 2020, 590, 125177. [Google Scholar] [CrossRef]
- Ramadhan, R.; Marzuki, M.; Yusnaini, H.; Muharsyah, R.; Suryanto, W.; Sholihun, S.; Vonnisa, M.; Battaglia, A.; Hashiguchi, H. Capability of GPM IMERG Products for Extreme Precipitation Analysis over the Indonesian Maritime Continent. Remote Sens. 2022, 14, 412. [Google Scholar] [CrossRef]
- Mishra, A.K. Effect of Rain Gauge Density over the Accuracy of Rainfall: A Case Study over Bangalore, India. SpringerPlus 2013, 2, 311. [Google Scholar] [CrossRef] [PubMed]
- Savitri, E.; Wahyuningrum, N.; Nugroho, H.Y.S.H.; Sudiana, N.; Indrajaya, Y.; Christanto, N. Identification of the rain gauge stations for the participatory flood and landslide mitigation in the Serayu river basin, Central Java. IOP Conf. Ser. Earth Environ. Sci. 2022, 1109, 012007. [Google Scholar] [CrossRef]
- Sunusi, N. Comparison of some schemes for determining the optimal number of rain gauges in a specific area: A case study in an urban area of South Sulawesi, Indonesia. AIMS Environ. Sci. 2022, 9, 244–260. [Google Scholar] [CrossRef]
- Permana, D.S.; Hutapea, T.D.; Praja, A.S.; Paski, J.A.I.; Makmur, E.E.S.; Haryoko, U.; Umam, I.H.; Saepudin, M.; Adriyanto, R. The Indonesia In-House Radar Integration System (InaRAISE) of Indonesian Agency for Meteorology Climatology and Geophysics (BMKG): Development, Constraint, and Progress. IOP Conf. Ser. Earth Environ. Sci. 2019, 303, 012051. [Google Scholar] [CrossRef]
- Hashiguchi, H.; Vonnisa, M.; Nugroho, S.; Yoseva, M. Z-R Relationships for Weather Radar in Indonesia from the Particle Size and Velocity (Parsivel) Optical Disdrometer. In Proceedings of the 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018; pp. 37–41. [Google Scholar] [CrossRef]
- Maier, M.W.; Gallagher, F.W.; Germain, K.S.; Anthes, R.; Zuffada, C.; Menzies, R.; Piepmeier, J.; Di Pietro, D.; Coakley, M.M.; Adams, E. Architecting the Future of Weather Satellites. Bull. Am. Meteorol. Soc. 2021, 102, E589–E610. [Google Scholar] [CrossRef]
- Fatkhuroyan, F.; Wati, T.; Sukmana, A.; Kurniawan, R. Validation of Satellite Daily Rainfall Estimates Over Indonesia. Forum Geogr. 2018, 32, 170–180. [Google Scholar] [CrossRef]
- Arno, G.; Muflihah, M.; Mujahidin, M. Uncertainty of Optimal Rain Gauge Coastal Region: Case Study Makassar. J. Civ. Eng. Forum 2020, 7, 121–132. [Google Scholar] [CrossRef]
- Gunadi, I.G.A.; Gunawan, I.M.A.O.; Candana, P.E.W.H.; Arnawa, I.A.W.; Putra, K.A.E.K. Klasifikasi curah hujan harian menggunakan learning vector quantization. J. Ilmu Komput. Indones. (JIK) 2022, 7. Available online: http://www.ogimet.com (accessed on 21 June 2024).
- Yasper, A.; Handoko, D.; Putra, M.; Aliwarga, H.K.; Rosid, M.S.R. Hyperparameters Optimization in XGBoost Model for Rainfall Estimation: A Case Study in Pontianak City. J. Penelit. Pendidik. IPA 2023, 9, 7113–7121. [Google Scholar] [CrossRef]
- Abdilah, M.N.; Ruhiat, Y.; Guntara, Y. Rainfall Classification Analysis Using Naïve Bayes Classifier Based on Air And Wind Temperatures in Serang City. SPEKTRA J. Fis. Dan Apl. 2024, 9, 39–47. [Google Scholar] [CrossRef]
- Ananda, N.; Mukhlish, F.; Wicaksana, H.S.; Budiawan, I. Spatial Evaluation of Estimation Rainfall on Weather Radar Using Marshall-Palmer Z-R Method in West Java. J. Otomasi Kontrol dan Instrumentasi 2024, 16, 35–43. [Google Scholar] [CrossRef]
- Hutapea, T.D.F.; Permana, D.S.; Praja, A.S.; Muzayanah, L.F. Modification of Z-R Relationship Constants in Surabaya Radar for Improving The Accuracy of Rainfall Estimates. J. Meteorol. Geofis. 2021, 21, 91–97. [Google Scholar] [CrossRef]
- Mulsandi, A.; Mamenun, M.; Fitriano, L.; Hidayat, R. Perbaikan Estimasi Curah Hujan Berbasis Data Dengan Memperhitungkan Faktor Pertumbuhan Awan. J. Sains Teknol. Modif. Cuaca 2019, 20, 67–78. [Google Scholar] [CrossRef]
- Nurasniyati, M.; Adriat, R. Estimasi Curah Hujan Di Kota Pontianak Berdasarkan Suhu, Ketebalan dan Tekanan Puncak Awan. Prisma Fisika 2018, 6, 184–189. [Google Scholar]
- Oktaviani, R. Estimation of Rainfall Rate Cumulative Distribution in Indonesia Using Global Satellite Mapping of Precipitation Data. KnE Eng. 2019, 1, 259–265. [Google Scholar] [CrossRef]
- Supari, S.; Cho, J. Performa Produk Curah Hujan Harian Dari Data Satelit Dan Reanalisis Di Indonesia. 2021. Available online: https://www.researchgate.net/publication/353446008 (accessed on 21 June 2024).
- Ayasha, N. A Comparison of Rainfall Estimation Using Himawari-8 Satellite Data In Different Indonesian Topographies. Int. J. Remote Sens. Earth Sci. (IJReSES) 2021, 17, 189–200. [Google Scholar] [CrossRef]
- Alfuadi, N.; Wandala, A. Comparative Test of Several Rainfall Estimation Methods Using Himawari-8 Data. Int. J. Remote Sens. Earth Sci. (IJReSES) 2016, 13, 95–104. [Google Scholar] [CrossRef]
- Setiyoko, A.; Osawa, T.; Nuarsa, W. Evaluation of GSMaP Precipitation Estimates Over Indonesia. Int. J. Environ. Geosci. 2019, 3, 26–43. [Google Scholar]
- Torres, M.; Howitt, R.; Rodrigues, L. Analyzing Rainfall Effects on Agricultural Income: Why Timing Matters. EconomiA 2019, 20, 1–14. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Z.; Xu, Z. Effects of Rainfall on Aircraft Aerodynamics. Prog. Aerosp. Sci. 2014, 71, 85–127. [Google Scholar] [CrossRef]
- Perera, L.P.; Soares, C.G. Weather Routing and Safe Ship Handling in the Future of Shipping. Ocean Eng. 2017, 130, 684–695. [Google Scholar] [CrossRef]
- Sangkharat, K.; Thornes, J.E.; Wachiradilok, P.; Pope, F.D. Determination of the Impact of Rainfall on Road Accidents in Thailand. Heliyon 2021, 7, e06061. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Cheng, L.; Li, M. Assessing and Mapping Maritime Transportation Risk Based on Spatial Fuzzy Multi-Criteria Decision Making: A Case Study in the South China Sea. Ocean Eng. 2020, 208, 107403. [Google Scholar] [CrossRef]
- Dalagnol, R.; Gramcianinov, C.B.; Crespo, N.M.; Luiz, R.; Chiquetto, J.B.; Marques, M.T.A.; Neto, G.D.; de Abreu, R.C.; Li, S.; Lott, F.C.; et al. Extreme rainfall and its impacts in the Brazilian Minas Gerais state in January 2020: Can we blame climate change? Clim. Resil. Sustain. 2022, 1, e15. [Google Scholar] [CrossRef]
- Ying, L.K. Rainfall Characteristics and Its Effect on Road Infrastructure Health. Int. J. Integr. Eng. 2019, 11, 234–246. [Google Scholar]
- Kundu, S.; Biswas, S.K.; Tripathi, D.; Karmakar, R.; Majumdar, S.; Mandal, S. A review on rainfall forecasting using ensemble learning techniques. e-Prime 2023, 6, 100296. [Google Scholar] [CrossRef]
- Chen, H.; Chandrasekar, V.; Tan, H.; Cifelli, R. Rainfall Estimation From Ground Radar and TRMM Precipitation Radar Using Hybrid Deep Neural Networks. Geophys. Res. Lett. 2019, 46, 10669–10678. [Google Scholar] [CrossRef]
- Yu, J.; Li, X.F.; Lewis, E.; Blenkinsop, S.; Fowler, H.J. UKGrsHP: A UK high-resolution gauge–radar–satellite merged hourly precipitation analysis dataset. Clim. Dyn. 2020, 54, 2919–2940. [Google Scholar] [CrossRef] [PubMed]
- Folino, G.; Guarascio, M.; Chiaravalloti, F.; Gabriele, S. A Deep Learning based architecture for rainfall estimation integrating heterogeneous data sources. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]
- Guarascio, M.; Folino, G.; Chiaravalloti, F.; Gabriele, S.; Procopio, A.; Sabatino, P. A Machine Learning Approach for Rainfall Estimation Integrating Heterogeneous Data Sources. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Latif, S.D.; Hazrin, N.A.B.; Koo, C.H.; Ng, J.L.; Chaplot, B.; Huang, Y.F.; El-Shafie, A.; Ahmed, A.N. Assessing rainfall prediction models: Exploring the advantages of machine learning and remote sensing approaches. Alex. Eng. J. 2023, 82, 16–25. [Google Scholar] [CrossRef]
- Sayed, B.T.; Al-Mohair, H.K.; Alkhayyat, A.; Ramírez-Coronel, A.A.; Elsahabi, M. Comparing machine-learning-based black box techniques and white box models to predict rainfall-runoff in a northern area of Iraq, the Little Khabur River. Water Sci. Technol. 2023, 87, 812–822. [Google Scholar] [CrossRef] [PubMed]
- Tian, W.; Yi, L.; Liu, W.; Huang, W.; Ma, G.; Zhang, Y. Ground radar precipitation estimation with deep learning approaches in meteorological private cloud. J. Cloud Comput. 2020, 9, 22. [Google Scholar] [CrossRef]
- Khan, R.S.; Bhuiyan, A.E. Artificial Intelligence-Based Techniques for Rainfall Estimation Integrating Multisource Precipitation Datasets. Atmosphere 2021, 12, 1239. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, Q.; Shao, J.; Wang, G.; Liu, H.; Tang, X.; Xue, Y.; Bai, L. Improving daily precipitation estimation in the data scarce area by merging rain gauge and TRMM data with a transfer learning framework. J. Hydrol. 2022, 613, 128455. [Google Scholar] [CrossRef]
- Lei, H.; Zhao, H.; Ao, T. A two-step merging strategy for incorporating multi-source precipitation products and gauge observations using machine learning classification and regression over China. Hydrol. Earth Syst. Sci. Discuss. 2022, 26, 2969–2995. [Google Scholar] [CrossRef]
- Mohia, Y.; Absi, R.; Lazri, M.; Labadi, K.; Ouallouche, F.; Ameur, S. Quantitative Estimation of Rainfall from Remote Sensing Data Using Machine Learning Regression Models. Hydrology 2023, 10, 52. [Google Scholar] [CrossRef]
- Pan, Y.; Yuan, Q.; Ma, J.; Wang, L. Improved Daily Spatial Precipitation Estimation by Merging Multi-Source Precipitation Data Based on the Geographically Weighted Regression Method: A Case Study of Taihu Lake Basin, China. Int. J. Environ. Res. Public Health 2022, 19, 13866. [Google Scholar] [CrossRef] [PubMed]
- Wehbe, Y.; Temimi, M.; Adler, R.F. Enhancing precipitation estimates through the fusion of weather radar, satellite retrievals, and surface parameters. Remote Sens. 2020, 12, 1342. [Google Scholar] [CrossRef]
- Narwane, S.; Sawarkar, S. Machine Learning and Class Imbalance: A Literature Survey. Ind. Eng. J. 2019, 12, 1–8. [Google Scholar] [CrossRef]
- Emmanuel, T.; Maupong, T.; Mpoeleng, D.; Semong, T.; Mphago, B.; Tabona, O. A survey on missing data in machine learning. J. Big Data 2021, 8, 140. [Google Scholar] [CrossRef] [PubMed]
- Quinlan, J.R. Induction of Decision Trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef]
- Prajwala, T.R. A Comparative Study on Decision Tree and Random Forest Using R Tool. Int. J. Adv. Res. Comput. Commun. Eng. 2015, 4, 196–199. [Google Scholar] [CrossRef]
- Leiva, R.G.; Anta, A.F.; Mancuso, V.; Casari, P. A Novel Hyperparameter-free Approach to Decision Tree Construction that Avoids Overfitting by Design. IEEE Access 2019, 7, 99978–99987. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Manzali, Y.; Elfar, M. Random Forest Pruning Techniques: A Recent Review. Oper. Res. Forum 2023, 4, 43. [Google Scholar] [CrossRef]
- Schapire, R.E. Explaining AdaBoost. In Empirical Inference; Springer: Berlin/Heidelberg, Germany, 1995; pp. 81–106. [Google Scholar]
- Cao, J.; Kwong, S.; Wang, R. A noise-detection based AdaBoost algorithm for mislabeled data. Pattern Recognit. 2012, 45, 4451–4465. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy Function Approximation: A Gradient Boosting Machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the KDD ’16: 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016. [Google Scholar] [CrossRef]
- Bentéjac, C.; Csörgő, A.; Martínez-Muñoz, G. A comparative analysis of gradient boosting algorithms. Artif. Intell. Rev. 2020, 54, 1937–1967. [Google Scholar] [CrossRef]
- Kapoor, S.; Perrone, V. A Simple and Fast Baseline for Tuning Large XGBoost Models. arXiv 2021, arXiv:2111.06924. Available online: http://arxiv.org/abs/2111.06924 (accessed on 21 June 2024).
- Tarwidi, D.; Pudjaprasetya, S.R.; Adytia, D.; Apri, M. An optimized XGBoost-based machine learning method for predicting wave run-up on a sloping beach. MethodsX 2023, 10, 102119. [Google Scholar] [CrossRef] [PubMed]
- Mienye, I.D.; Sun, Y. A Survey of Ensemble Learning: Concepts, Algorithms, Applications, and Prospects. IEEE Access 2022, 10, 99129–99149. [Google Scholar] [CrossRef]
- Putra, M.; Rosid, M.S.; Handoko, D. Rainfall Estimation Using Machine Learning Approaches with Raingauge, Radar, and Satellite Data. In Proceedings of the International Conference on Electrical Engineering and Informatics (ICELTICs), Banda Aceh, Indonesia, 27–28 September 2022. [Google Scholar]
- Han, Y.; Wu, J.; Zhai, B.; Pan, Y.; Huang, G.; Wu, L.; Zeng, W. Coupling a Bat Algorithm with XGBoost to Estimate Reference Evapotranspiration in the Arid and Semiarid Regions of China. Adv. Meteorol. 2019, 2019, 9575782. [Google Scholar] [CrossRef]
- Mai, X.; Zhong, H.; Li, L. Research on Rain or Shine Weather Forecast in Precipitation Nowcasting Based on XGBoost. In Lecture Notes on Data Engineering and Communications Technologies; Springer Science and Business Media Deutschland GmbH: Berlin/Heidelberg, Germany, 2021; Volume 88, pp. 1313–1319. [Google Scholar] [CrossRef]
- Mai, X.; Zhong, H.; Li, L. Combination of XGBoost and PPLK method for improving the precipitation nowcasting. MATEC Web Conf. 2022, 355, 03039. [Google Scholar] [CrossRef]
- Bartz, E.; Bartz-Beielstein, T.; Zaefferer, M.; Mersmann, O. Hyperparameter Tuning for Machine and Deep Learning with R: A Practical Guide; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Puspasari, R.L.; Yoon, D.; Kim, H.; Kim, K.-W. Machine Learning for Flood Prediction in Indonesia: Providing Online Access for Disaster Management Control. Econ. Environ. Geol. 2023, 56, 65–73. [Google Scholar] [CrossRef]
- Ramdhan, M.; Arifin, T. Application of Geographic Information System for Assessment of Indonesia Marine Proportion. J. Ilm. Geomatika 2013, 19, 141–146. [Google Scholar]
- Ardhitama, A.; Sholihah, R. Kajian Penentuan Awal Musim di Daerah Non ZOM 14 Riau dengan Menggunakan Data Curah Hujan dan Hari Hujan. J. Sains Teknol. Modif. Cuaca 2014, 15, 65–73. [Google Scholar] [CrossRef]
- Aldrian, E. Meteorologi Laut Indonesia. Badan Meteorologi dan Geofisika 2008. [Google Scholar]
- Dembélé, M.; Zwart, S.J. Evaluation and comparison of satellite-based rainfall products in Burkina Faso, West Africa. Int. J. Remote Sens. 2016, 37, 3995–4014. [Google Scholar] [CrossRef]
- Nepal, B.; Shrestha, D.; Sharma, S.; Shrestha, M.S.; Aryal, D.; Shrestha, N. Assessment of GPM-Era Satellite Products’ (IMERG and GSMaP) Ability to Detect Precipitation Extremes over Mountainous Country Nepal. Atmosphere 2021, 12, 254. [Google Scholar] [CrossRef]
- Ji, H.; Peng, D.; Gu, Y.; Liang, Y.; Luo, X. Evaluation of multiple satellite precipitation products and their potential utilities in the Yarlung Zangbo River Basin. Sci. Rep. 2022, 12, 13334. [Google Scholar] [CrossRef] [PubMed]
- Foelsche, U.; Kirchengast, G.; Fuchsberger, J.; Tan, J.; Petersen, W.A. Evaluation of GPM IMERG Early, Late, and Final rainfall estimates with WegenerNet gauge data in southeast Austria. Hydrol. Earth Syst. Sci. 2017, 21, 6559–6572. [Google Scholar] [CrossRef]
- Nan, L.; Yang, M.; Wang, H.; Xiang, Z.; Hao, S. Comprehensive evaluation of global precipitation measurement mission (GPM) IMERG precipitation products over mainland China. Water 2021, 13, 3381. [Google Scholar] [CrossRef]
- Gilewski, P.; Nawalany, M. Inter-comparison of Rain-Gauge, Radar, and Satellite (IMERG GPM) precipitation estimates performance for rainfall-runoff modeling in a mountainous catchment in Poland. Water 2018, 10, 1665. [Google Scholar] [CrossRef]
- Binetti, M.S.; Campanale, C.; Massarelli, C.; Uricchio, V.F. The Use of Weather Radar Data: Possibilities, Challenges and Advanced Applications. Earth 2022, 3, 157–171. [Google Scholar] [CrossRef]
- Sokol, Z.; Szturc, J.; Orellana-Alvear, J.; Popová, J.; Jurczyk, A.; Célleri, R. The Role of Weather Radar in Rainfall Estimation and Its Application in Meteorological and Hydrological Modelling—A Review. Remote Sens. 2021, 13, 351. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An introduction to Himawari-8/9—Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn. Ser. II 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Purbantoro, B.; Aminuddin, J.; Manago, N.; Toyoshima, K.; Lagrosas, N.; Sumantyo, J.T.S.; Kuze, H. Comparison of Cloud Type Classification with Split Window Algorithm Based on Different Infrared Band Combinations of Himawari-8 Satellite. Adv. Remote Sens. 2018, 7, 218–234. [Google Scholar] [CrossRef]
- Kim, B.-Y.; Lee, K.-T. Using the Himawari-8 AHI multi-channel to improve the calculation accuracy of outgoing longwave radiation at the top of the atmosphere. Remote Sens. 2019, 11, 589. [Google Scholar] [CrossRef]
- Yang, X.; You, Z.; Hiller, J.; Watkins, D. Updating and augmenting weather data for pavement mechanistic-empirical design using ASOS/AWOS database in Michigan. Int. J. Pavement Eng. 2018, 19, 1025–1033. [Google Scholar] [CrossRef]
- Sulistya, W.; Nugraha, H.A.; Dharmawan, G.B.; Putra, M.; Furqon, A.; Sugiarto, S.; Pramagusta, A.P. Development of Automated Weather Observing System Based on Realtime Web Display. In Proceedings of the 2019 International Electronics Symposium (IES), Surabaya, Indonesia, 27–28 September 2019; pp. 577–581. [Google Scholar]
- Otuaga, P.M. Rainfall Intensity-Duration Frequency Curves for Maxima Duration Series for Ondo Town, Ondo State, Nigeria. Am. Sci. Res. J. Eng. Technol. Sci. (ASRJETS) 2015, 12, 66–74. [Google Scholar]
- Yang, W.; Liu, J.; Li, M.; Guo, Z. Isophote-Constrained Autoregressive Model with Adaptive Window Extension for Image Interpolation. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 1071–1086. [Google Scholar] [CrossRef]
- Han, D. Comparison of Commonly Used Image Interpolation Methods. In Proceedings of the 2nd International Conference on Computer Science and Electronics Engineering (ICCSEE 2013), Hangzhou, China, 22–23 March 2013; pp. 1556–1559. [Google Scholar]
- Weerasekera, R.; Sridharan, M.; Ranjitkar, P. Implications of Spatiotemporal Data Aggregation on Short-Term Traffic Prediction Using Machine Learning Algorithms. J. Adv. Transp. 2020, 2020, 7057519. [Google Scholar] [CrossRef]
- Shenk, J.; Byttner, W.; Nambusubramaniyan, S.; Zoeller, A. Traja: A Python toolbox for animal trajectory analysis. J. Open Source Softw. 2021, 6, 3202. [Google Scholar] [CrossRef]
- Kang, D.; Rubel, O.; Byna, S.; Blanas, S. Predicting and Comparing the Performance of Array Management Libraries. In Proceedings of the 2020 IEEE 34th International Parallel and Distributed Processing Symposium (IPDPS), New Orleans, LA, USA, 18–22 May 2020; pp. 906–915. [Google Scholar] [CrossRef]
- Khan, S.; Maggioni, V.; Porcacchia, L. Uncertainties Associated with the IMERG Multi-Satellite Precipitation Product. In Proceedings of the IGARSS 2016—2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 2127–2130. [Google Scholar]
- Hartke, S.H.; Wright, D.B.; Quintero, F.; Falck, A.S. Incorporating IMERG satellite precipitation uncertainty into seasonal and peak streamflow predictions using the Hillslope Link hydrological model. J. Hydrol. X 2023, 18, 100148. [Google Scholar] [CrossRef]
- Omranian, E.; Sharif, H.O. Evaluation of the Global Precipitation Measurement (GPM) Satellite Rainfall Products over the Lower Colorado River Basin, Texas. J. Am. Water Resour. Assoc. 2018, 54, 882–898. [Google Scholar] [CrossRef]
- Liu, S.; Hu, K.; Zhang, S.; Zeng, Y. Comprehensive Evaluation of Satellite-Based Precipitation at Sub-Daily Time Scales Over a High-Profile Watershed with Complex Terrain. Earth Space Sci. 2019, 6, 2347–2361. [Google Scholar] [CrossRef]
- Liu, Z.; Hou, H.; Zhang, L.; Hu, B. Event-Based Bias Correction of the GPM IMERG V06 Product by Random Forest Method over Mainland China. Remote Sens. 2022, 14, 3859. [Google Scholar] [CrossRef]
- Partarini, N.M.C.; Sujono, J.; Pratiwi, E.P.A. Koreksi dan Validasi Data Curah Hujan Satelite GPM-IMERG dan CHIRPS di DAS Selorejo, Kabupaten Malang. In Proceedings of the Civil Engineering, Environmental, Disaster & Risk Management Symposium (CEEDRiMS), Online, 30 June–30 July 2021; pp. 149–156. [Google Scholar]
- Misnawati, M.; Boer, R.; June, T.; Faqih, A. Perbandingan Metodologi Koreksi Bias Data Curah Hujan CHIRPS. Limnotek 2018, 25, 18–29. [Google Scholar]
- Mamenun, M.; Pawitan, H.; Sopaheluwakan, A. Validasi dan koreksi data satelit trmm pada tiga pola hujan di Indonesia. J. Meteorol. dan Geofis. 2014, 15. [Google Scholar] [CrossRef]
- Tapiador, F.J.; Navarro, A.; García-Ortega, E.; Merino, A.; Sánchez, J.L.; Marcos, C.; Kummerow, C. The contribution of rain gauges in the calibration of the IMERG product: Results from the first validation over Spain. J. Hydrometeorol. 2020, 21, 161–182. [Google Scholar] [CrossRef]
- Barbieri, S.; Di Fabio, S.; Lidori, R.; Rossi, F.L.; Marzano, F.S.; Picciotti, E. Mosaicking Weather Radar Retrievals from an Operational Heterogeneous Network at C and X Band for Precipitation Monitoring in Italian Central Apennines. Remote Sens. 2022, 14, 248. [Google Scholar] [CrossRef]
- Piraei, R.; Afzali, S.H.; Niazkar, M. Assessment of XGBoost to Estimate Total Sediment Loads in Rivers. Water Resour. Manag. 2023, 37, 5289–5306. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Teke, A. Advanced hyperparameter optimization for improved spatial prediction of shallow landslides using extreme gradient boosting (XGBoost). Bull. Eng. Geol. Environ. 2022, 81, 201. [Google Scholar] [CrossRef]
- Yin, J.; Li, N. Ensemble learning models with a Bayesian optimization algorithm for mineral prospectivity mapping. Ore Geol. Rev. 2022, 145, 104916. [Google Scholar] [CrossRef]
- Al-Taai, S.R.; Azize, N.M.; Thoeny, Z.A.; Imran, H.; Bernardo, L.F.A.; Al-Khafaji, Z. XGBoost Prediction Model Optimized with Bayesian for the Compressive Strength of Eco-Friendly Concrete Containing Ground Granulated Blast Furnace Slag and Recycled Coarse Aggregate. Appl. Sci. 2023, 13, 8889. [Google Scholar] [CrossRef]
- Wu, B.; Wei, M.; Chen, P. Bayesian optimization-based XGBoost for performance Prediction of Carbon Nanotube Membranes. Preprint 2024. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, B.; Gao, Y.; Gao, Y.; Wang, L.; Wang, L.; Li, T.; Li, T. BO-XGBoost-based voltage/var optimization for distribution network considering the LCOE of PV system. IET Renew. Power Gener. 2023, 18, 502–514. [Google Scholar] [CrossRef]
- Parthasarathy, S.; Lakshminarayanan, A.R.; Khan, A.A.A.; Sathick, K.J.; Jayaraman, V. Detection of Health Insurance Fraud using Bayesian Optimized XGBoost. Int. J. Saf. Secur. Eng. 2023, 13, 853–861. [Google Scholar] [CrossRef]
- Pan, X.; Wu, H.; Chen, S.; Nanding, N.; Huang, Z.; Chen, W.; Li, C.; Li, X. Evaluation and Applicability Analysis of GPM Satellite Precipitation over Mainland China. Remote Sens. 2023, 15, 2866. [Google Scholar] [CrossRef]
- Misnawati, F. Koreksi bias estimasi curah hujan pada satelit gpm-imerg di pulau Jawa. Megasains 2022, 13, 26–33. [Google Scholar] [CrossRef]
- Iqbal, Z.; Ahmed, K.; Wang, X.; Gabriel, H.F. Bias Correction Method of High-Resolution Satellite-Based Precipitation Product for Peninsular Malaysia. Preprint 2021. [Google Scholar] [CrossRef]
- Sorooshian, S.; AghaKouchak, A.; Arkin, P.; Eylander, J.; Foufoula-Georgiou, E.; Harmon, R.; Hendrickx, J.M.H.; Imam, B.; Kuligowski, R.; Skahill, B.; et al. Advanced concepts on remote sensing of precipitation at multiple scales. Bull. Am. Meteorol. Soc. 2011, 92, 1353–1357. [Google Scholar] [CrossRef]
- Serrat-Capdevila, A.; Merino, M.; Valdes, J.B.; Durcik, M. Evaluation of the performance of three satellite precipitation products over Africa. Remote Sens. 2016, 8, 836. [Google Scholar] [CrossRef]
- Sun, Q.; Miao, C.; Duan, Q.; Ashouri, H.; Sorooshian, S.; Hsu, K.-L. A Review of Global Precipitation Data Sets: Data Sources, Estimation, and Intercomparisons. Rev. Geophys. 2018, 56, 79–107. [Google Scholar] [CrossRef]
- Lasser, M.; O, S.; Foelsche, U. Evaluation of GPM-DPR precipitation estimates with WegenerNet gauge data. Atmos. Meas. Tech. Discuss. 2018, 1–30. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, H.; Zheng, F. Aerosol optical depth retrieval over East Asia using Himawari-8/AHI data. Remote Sens. 2018, 10, 137. [Google Scholar] [CrossRef]
- Miles, N.L.; Verlinde, J.; Clothiaux, E.E. Cloud Droplet Size Distributions in Low-Level Stratiform Clouds. J. Atmos. Sci. 2000, 57, 295–311. [Google Scholar] [CrossRef]
- Morbidelli, R. Rainfall: Modeling, Measurement and Applications; Elsevier: Amsterdam, The Netherlands, 2022. [Google Scholar]
- Kojima, M.; Miura, T.; Furukawa, K.; Hyakusoku, Y.; Ishikiri, T.; Kai, H.; Iguchi, T.; Hanado, H.; Nakagawa, K. Dual-frequency precipitation radar (DPR) development on the global precipitation measurement (GPM) core observatory. In Earth Observing Missions and Sensors: Development, Implementation, and Characterization II; SPIE: Bellingham, WA, USA, 2012; p. 85281A. [Google Scholar] [CrossRef]
- Gaona, M.F.R.; Overeem, A.; Leijnse, H.; Uijlenhoet, R. First-year evaluation of GPM rainfall over the Netherlands: IMERG day 1 final run (V03D). J. Hydrometeorol. 2016, 17, 2799–2814. [Google Scholar] [CrossRef]
- Pejcic, V.; Garfias, P.S.; Mühlbauer, K.; Trömel, S.; Simmer, C. Comparison between precipitation estimates of ground-based weather radar composites and GPM’s DPR rainfall product over Germany. Meteorol. Z. 2020, 29, 451–466. [Google Scholar] [CrossRef]
- Global Precipitation Measurement (GPM) Mission Algorithm Theoretical Basis Document GPROF2017 Version 1 and Version 2 (Used in GPM V5 Processing) Passive Microwave Algorithm Team Facility. 2018. Available online: https://gpm.nasa.gov/sites/default/files/2020-05/ATBD_GPM_V5B_April15_2018.pdf (accessed on 31 July 2024).
- Nanding, N.; Rico-Ramirez, M.A. Precipitation Measurement with Weather Radars. In Handbook of Environmental Chemistry; Springer Science and Business Media Deutschland GmbH: Berlin/Heidelberg, Germany, 2021; Volume 102, pp. 235–258. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, D. A Review on ‘Weather Surveillance Radar’. Int. J. Adv. Eng. 2015, 1, 239310. [Google Scholar]
- Nikahd, A.; Hashim, M.; Nazemosadat, M.J. A Review of Uncertainty Sources on Weather Ground-Based Radar for Rainfall Estimation. Appl. Mech. Mater. 2016, 818, 254–271. [Google Scholar] [CrossRef]
- Rauber, R.M.; Olthoff, L.S.; Ramamurthy, M.K.; Kunkel, K.E. The Relative Importance of Warm Rain and Melting Processes in Freezing Precipitation Events. J. Appl. Meteorol. 2000, 39, 1185–1195. [Google Scholar] [CrossRef]
- Curtius, J. Nucleation of atmospheric particles. EPJ Web Conf. 2009, 1, 199–209. [Google Scholar] [CrossRef]
- Testik, F.Y.; Barros, A.P.; Bliven, L.F. Toward a physical characterization of raindrop collision outcome regimes. J. Atmos. Sci. 2011, 68, 1097–1113. [Google Scholar] [CrossRef]
- Zhu, J.; Guo, B.; Luo, Y.; Pan, J. A feasible method for training classified data with sparsity. J. Phys. Conf. Ser. 2021, 1978, 012067. [Google Scholar] [CrossRef]
- Ali, Z.A.; Abduljabbar, Z.H.; Tahir, H.A.; Sallow, A.B.; Almufti, S.M. eXtreme Gradient Boosting Algorithm with Machine Learning: A Review. Acad. J. Nawroz Univ. 2023, 12, 320–334. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Size of Dataset | Product | Time Resolution | Spatial Resolution | Unit of Measurement |
|---|---|---|---|---|---|
| GPM satellite (NASA, USA) | 9.3 GiB | Rainfall | 30 min | 10 × 10 km | mm/h |
| Himawari satellite (JMA, Japan) | 1 TiB | Brightness temperature | 10 min | 2 × 2 km | K |
| Weather radars (EEC, USA) | 50.7 TiB | Reflectivity | 10 min | 0.5 × 0.5 km | dBZ |
| Rain gauges (All Weather, Inc, USA) | 13.3 MiB | Rainfall | 1 min | Point | mm |
| Location | Latitude | Longitude | Elevation (masl) |
|---|---|---|---|
| Bandar Lampung | 105.174 | −5.239 | 83 |
| Banjarmasin | 114.767 | −3.439 | 20 |
| Pontianak | 109.402 | −0.142 | 2 |
| Deli Serdang | 98.884 | 3.645 | 7 |
| Gorontalo | 122.852 | 0.638 | 32 |
| Biak | 136.104 | −1.19 | 12 |
| No. | Location | Latitude | Longitude | Elevation (masl) | Frequency Band | Polarization | Peak Power |
|---|---|---|---|---|---|---|---|
| 1 | Banda Aceh | 5.53 | 95.49 | 446 | C | Single | 250 kW |
| 2 | Nias | 1.16 | 97.0 | 6 | C | Single | 350 kW |
| 3 | Medan | 3.53 | 98.63 | 61 | C | Single | 250 kW |
| 4 | Padang | 0.78 | 100.3 | 24 | C | Single | 250 kW |
| 5 | Pekanbaru | 0.45 | 101.46 | 31 | C | Single | 250 kW |
| 6 | Bengkulu | −3.85 | 102.34 | 15 | C | Single | 400 kW |
| 7 | Jambi | −1.63 | 103.64 | 44 | C | Single | 400 kW |
| 8 | Palembang | −2.91 | 104.7 | 12 | C | Single | 250 kW |
| 9 | Pangkalpinang | −2.16 | 106.14 | 30 | C | Single | 350 kW |
| 10 | Lampung | −5.2 | 105.17 | 106 | C | Single | 250 kW |
| 11 | Cengkareng | −6.17 | 106.64 | 25 | C | Single | 250 kW |
| 12 | Pontianak | −0.08 | 109.39 | 26 | C | Single | 250 kW |
| 13 | Sintang | −0.04 | 111.45 | 28 | C | Dual | 400 kW |
| 14 | Pangkalanbun | −2.73 | 111.64 | 31 | C | Single | 400 kW |
| 15 | Banjarmasin | −3.46 | 114.84 | 81 | C | Single | 250 kW |
| 16 | Balikpapan | −1.25 | 116.89 | 50 | C | Single | 250 kW |
| 17 | Tarakan | 3.31 | 117.58 | 45 | C | Single | 250 kW |
| 18 | Yogyakarta | −7.73 | 110.35 | 182 | C | Single | 350 kW |
| 19 | Surabaya | −7.41 | 112.76 | 3 | C | Single | 250 kW |
| 20 | Denpasar | −8.73 | 115.17 | 28 | C | Single | 250 kW |
| 21 | Lombok | −8.75 | 116.24 | 94 | C | Single | 400 kW |
| 22 | Bima | −8.54 | 118.68 | 45 | C | Single | 250 kW |
| 23 | Maumere | −8.61 | 122.08 | 36 | C | Single | 400 kW |
| 24 | Kupang | −10.21 | 123.62 | 326 | C | Dual | 400 kW |
| 25 | Majene | −3.55 | 118.98 | 30 | X | Single | 2 × 500 kW |
| 26 | Makassar | −4.99 | 119.57 | 11 | C | Single | 250 kW |
| 27 | Masamba | −2.55 | 120.32 | 66 | X | Single | 2 × 500 kW |
| 28 | Gorontalo | 0.63 | 123.01 | 90 | C | Single | 250 kW |
| 29 | Ternate | 0.85 | 127.34 | 105 | C | Single | 400 kW |
| 30 | Manado | 1.5 | 129.91 | 16 | C | Single | 250 kW |
| 31 | Ambon | −3.71 | 128.09 | 9 | C | Single | 250 kW |
| 32 | Biak | −1.16 | 136.08 | 72 | C | Single | 250 kW |
| 33 | Sorong | −0.89 | 131.28 | 22 | C | Single | 250 kW |
| 34 | Timika | −4.52 | 136.89 | 54 | C | Single | 250 kW |
| 35 | Merauke | −8.49 | 131.28 | 88 | C | Single | 250 kW |
| Hyperparameter | Range | Definition |
|---|---|---|
| learning_rate | 0.01–1 | The step size when updating model weights to minimize errors, which affects the speed and convergence of the training process. |
| max_depth | 0–12 | The maximum depth of a tree, which controls the complexity of the model by limiting the number of levels of splitting in each tree. |
| n_estimators | 100–1000 | The total number of decision trees to be built and used in an ensemble model, which directly affects the performance and complexity of the model. |
| subsample | 0.1–1 | The proportion of training data samples used to build each tree, introducing variation in the training process. |
| min_child_weight | 0.1–2 | The sum of instance weights required at a leaf node, which ensures that nodes will not split if they do not meet this minimum weight threshold. |
| gamma | 0–1 | The minimal reduction in loss required to split nodes, which helps control tree growth by preventing insignificant splits. |
| colsample_bytree | 0.1–1 | The proportion of features (columns) randomly selected to build each tree, which helps prevent overfitting by reducing the correlation between trees. |
| Hyperparameter | Optimal Value |
|---|---|
| learning_rate | 0.04 |
| max_depth | 1 |
| n_estimators | 886 |
| subsample | 0.96 |
| min_child_weight | 0.14 |
| gamma | 0.08 |
| colsample_bytree | 0.45 |
| Location | RMSE | Accuracy |
|---|---|---|
| Bandar Lampung | 2.75 | 0.89 |
| Banjarmasin | 2.57 | 0.91 |
| Pontianak | 3.08 | 0.89 |
| Deli Serdang | 2.64 | 0.9 |
| Gorontalo | 1.85 | 0.92 |
| Biak | 2.48 | 0.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Putra, M.; Rosid, M.S.; Handoko, D. High-Resolution Rainfall Estimation Using Ensemble Learning Techniques and Multisensor Data Integration. Sensors 2024, 24, 5030. https://doi.org/10.3390/s24155030
Putra M, Rosid MS, Handoko D. High-Resolution Rainfall Estimation Using Ensemble Learning Techniques and Multisensor Data Integration. Sensors. 2024; 24(15):5030. https://doi.org/10.3390/s24155030
Chicago/Turabian StylePutra, Maulana, Mohammad Syamsu Rosid, and Djati Handoko. 2024. "High-Resolution Rainfall Estimation Using Ensemble Learning Techniques and Multisensor Data Integration" Sensors 24, no. 15: 5030. https://doi.org/10.3390/s24155030