
Adaptive Frame Structure Design for Sensing-Assisted Downlink Communication in the Vehicle-to-Infrastructure Scenario


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
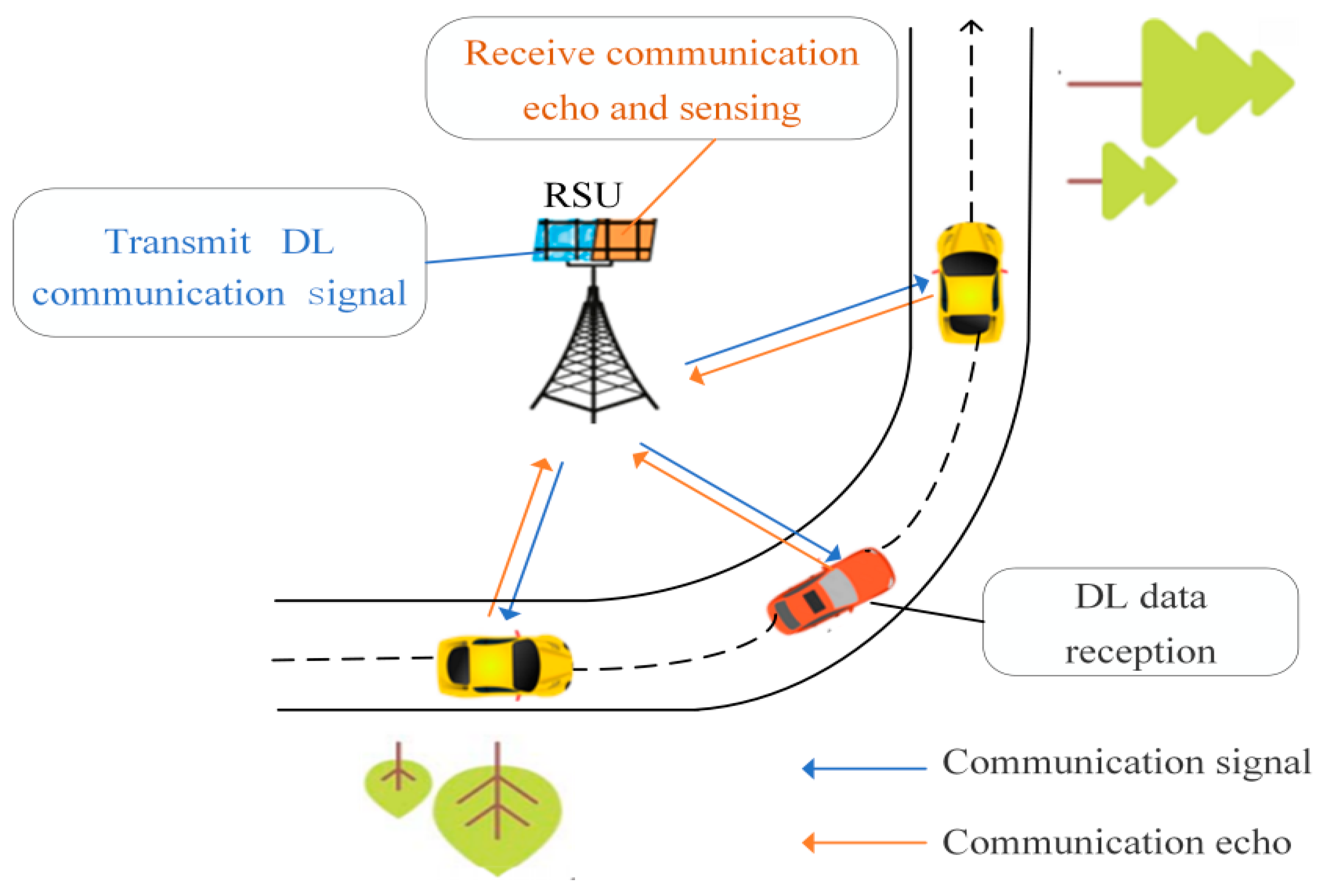
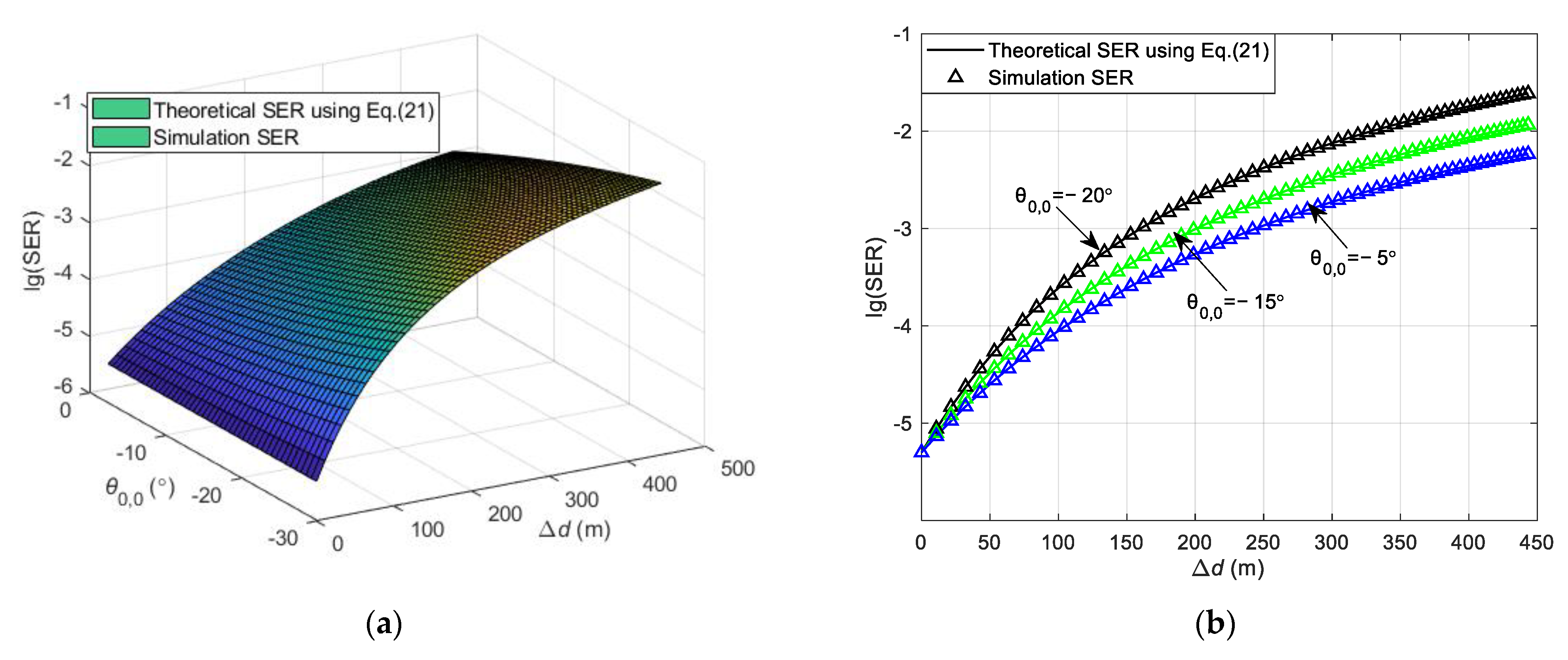
- In the V2I scenario, the RSU is assumed to have the capability to acquire vehicle position and speed through sensing. The theoretical analysis outlines the function relationship between the communication SER and various initial positions of the vehicle, as well as different moving distances.
- (2)
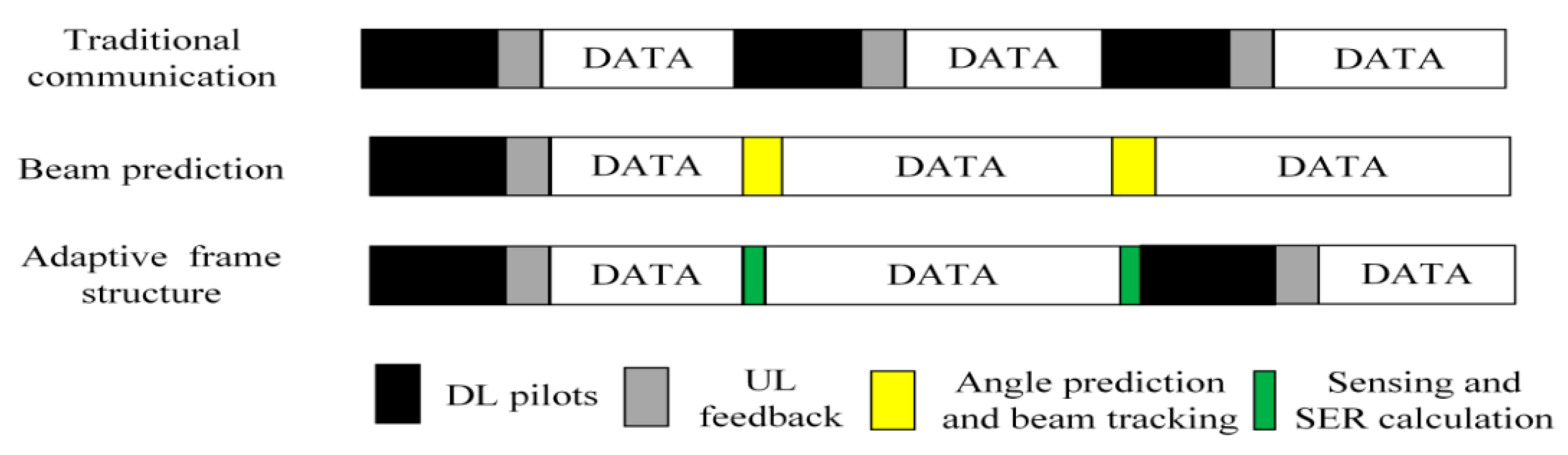
- A sensing-assisted communication adaptive frame structure design is proposed. Specifically, a communication SER threshold is established. If the communication SER exceeds the threshold value during vehicle movement, the RSU must retransmit the pilots for channel estimation; otherwise, the pilots are not transmitted. The proposed scheme can adaptively adjust the transmission interval of pilots within the frame structure based on the vehicle’s initial position, the vehicle’s moving speed, and the communication SER requirements.
- (3)
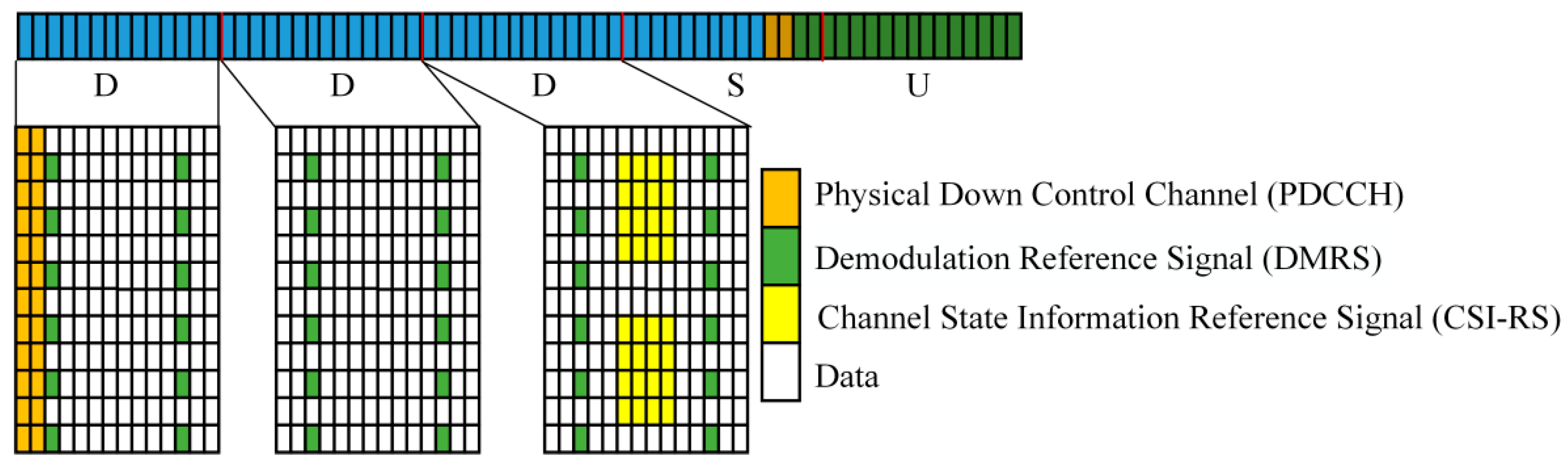
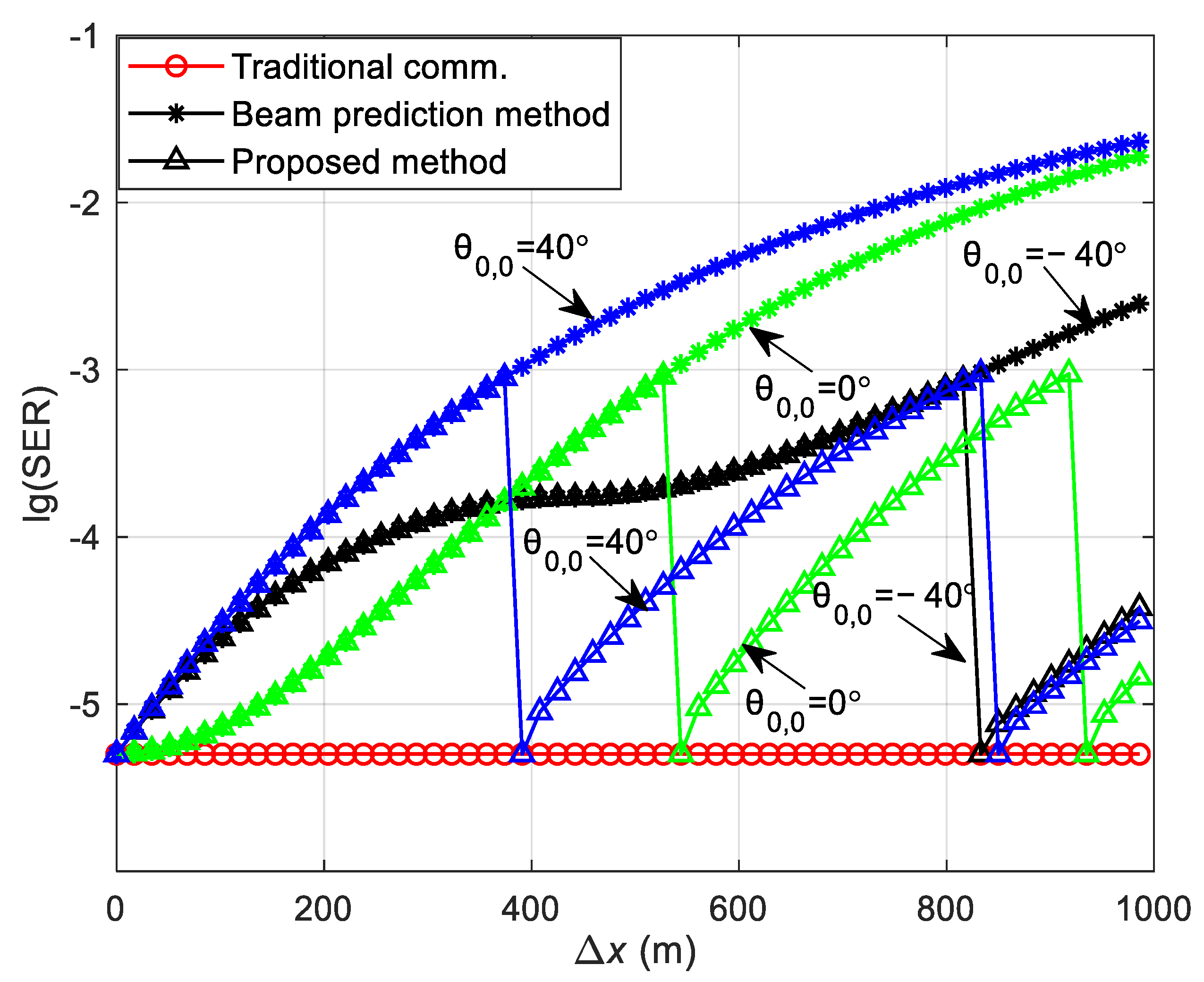
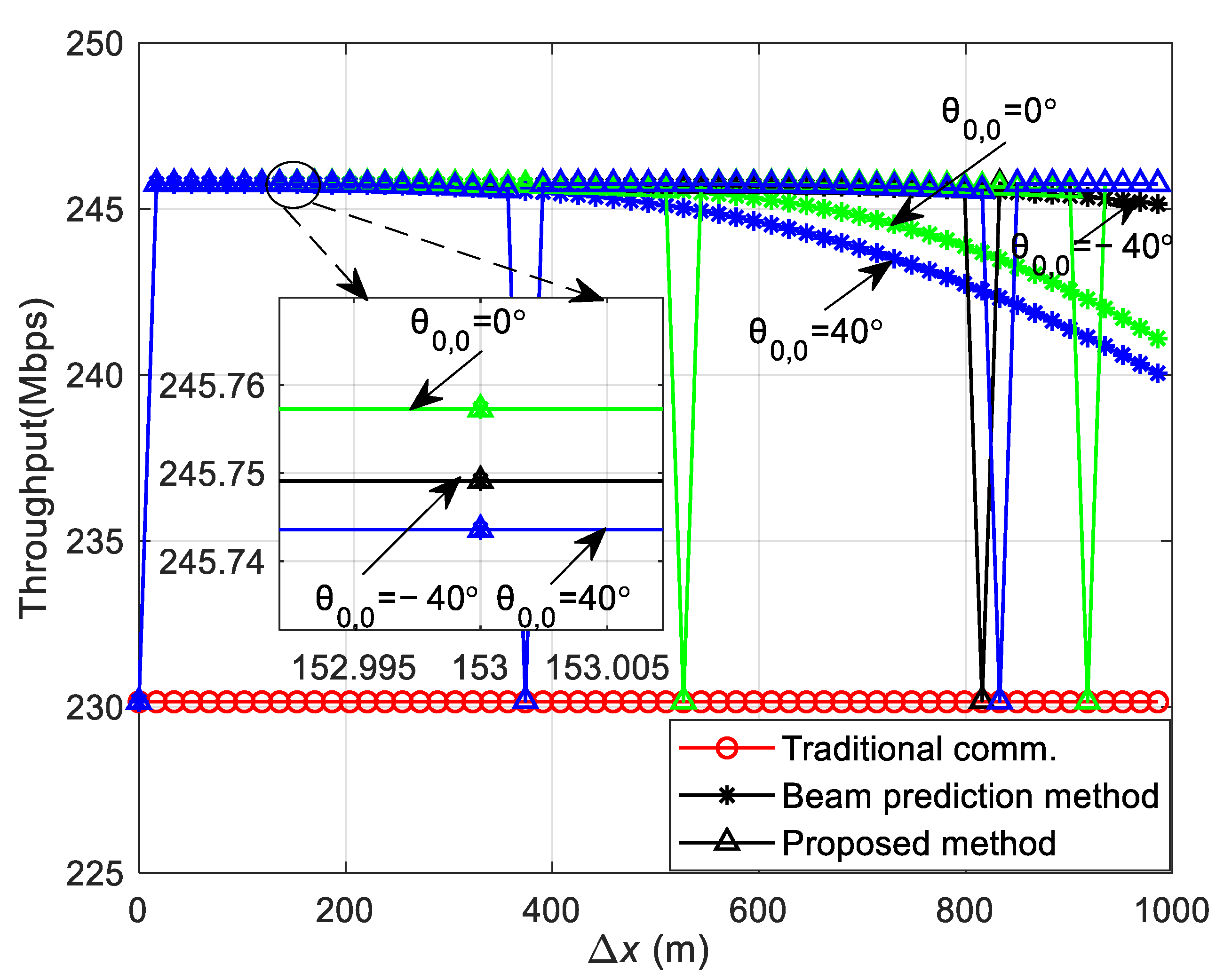
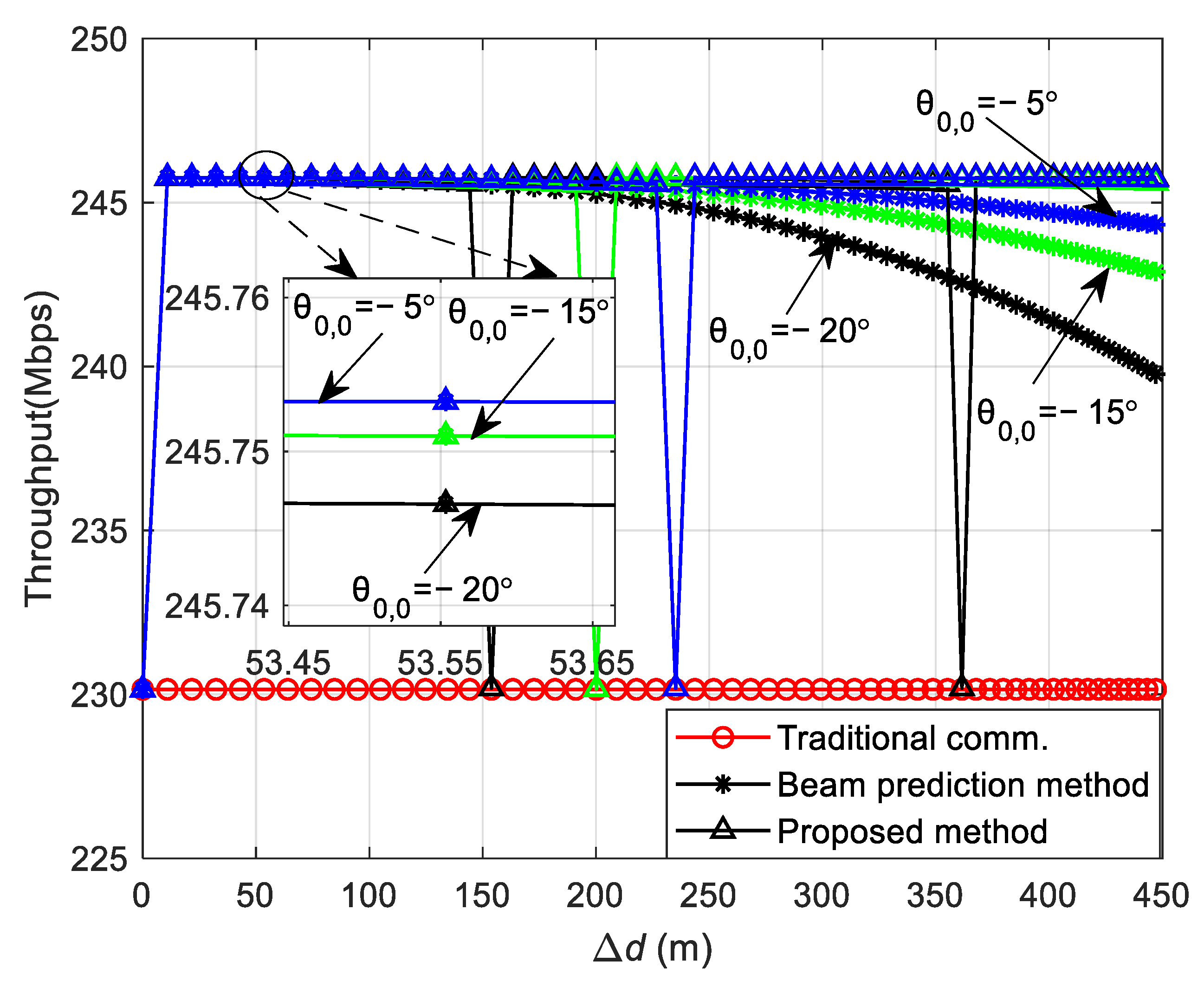
- The SER and throughput performance of three frame structures are comparatively analyzed in both straight and curved path scenarios. These structures include the traditional communication protocol frame structure, the existing beam prediction-based frame structure, and the proposed sensing-assisted adaptive frame structure.
2. V2I Downlink Communication System Model
2.1. Transmit Signal
2.2. Channel Model
- (1)
- DL communication channel model.
- (2)
- Sensing channel model.
2.3. Receive Signal
3. Adaptive Frame Structure Design
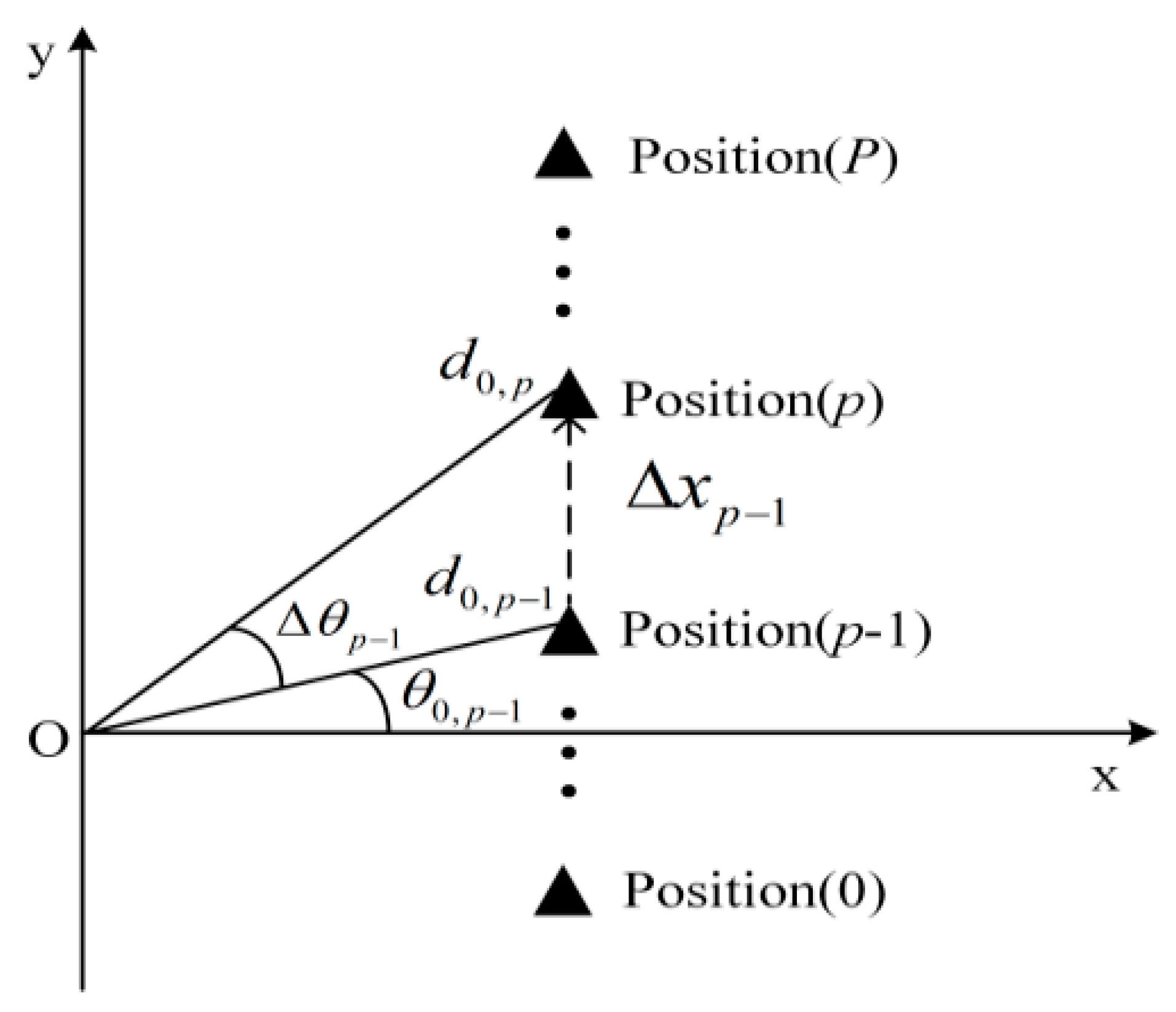
3.1. SER Analysis of DL Communication during Vehicle Movement
- (1)
- Straight path scenario.
- (2)
- Curved path scenario.
3.2. Communication Adaptive Frame Structure Design
4. Simulation and Analysis of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deepender, M.; Shrivastava, U.; Verma, J.K. A study on 5G technology and its applications in telecommunications. In Proceedings of the 2021 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 1–3 December 2021. [Google Scholar]
- Liu, G.; Huang, Y.; Li, N.; Dong, J.; Jin, J.; Wang, Q.; Li, N. Vision, requirements and network architecture of 6G mobile network beyond 2030. China Commun. 2020, 17, 92–104. [Google Scholar] [CrossRef]
- Ghafoo, K.Z.; Kong, L.; Rawat, D.B.; Hosseini, E.; Sadiq, A.S. Quality of service aware routing protocol in software-defined internet of vehicles. IEEE Internet Things J. 2019, 6, 2817–2828. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Abdullah, A.; Cao, Y.; Altameem, A.; Prasad, M.; Lin, C.T.; Liu, X. Internet of vehicles: Motivation, layered architecture, network model, challenges, and future aspects. IEEE Access 2016, 4, 5356–5373. [Google Scholar] [CrossRef]
- Zhong, Y.; Bi, T.; Wang, J.; Zeng, J.; Huang, Y.; Jiang, T.; Wu, Q.; Wu, S. Empowering the V2X network by integrated sensing and communications: Background, design, advances, and opportunities. IEEE Netw. 2022, 36, 54–60. [Google Scholar] [CrossRef]
- Yuan, W.J.; Li, S.Y.; Xiang, L.; Ng, D.W.K. Distributed estimation framework for beyond 5G intelligent vehicular networks. IEEE Open J. Veh. Technol. 2020, 1, 190–214. [Google Scholar] [CrossRef]
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A survey of the connected vehicle landscape architectures, enabling technologies, applications, and development areas. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2391–2406. [Google Scholar] [CrossRef]
- Ozkaptan, C.D.; Zhu, H.; Ekici, E.; Altintas, O. Software-Defined MIMO OFDM joint radar-communication platform with fully digital mmWave architecture. In Proceedings of the 2023 IEEE 3rd International Symposium on Joint Communications & Sensing (JC&S), Seefeld, Austria, 5–7 March 2023. [Google Scholar]
- Wei, Z.; Wang, Y.; Ma, L.; Yang, S.; Feng, Z.; Pan, C.; Zhang, Q.; Wang, Y.; Wu, H.; Zhang, P. 5G PRS-Based sensing: A sensing reference signal approach for joint sensing and communication system. IEEE Trans. Veh. Technol. 2023, 72, 3250–3263. [Google Scholar] [CrossRef]
- Zhao, Q.; Tang, A.; Wang, X. Reference signal design and power optimization for energy-efficient 5G V2X integrated sensing and communications. IEEE Trans. Green Commun. Netw. 2023, 7, 379–392. [Google Scholar] [CrossRef]
- Khan, U.; Jameel, F.; Kumar, N.; Jäntti, R.; Guizani, M. Backscatter-Enabled efficient V2X communication with non-orthogonal multiple access. IEEE Trans. Veh. Technol. 2021, 70, 1724–1735. [Google Scholar] [CrossRef]
- Chattopadhyay, R.; Tham, C.K. Joint sensing and processing resource allocation in vehicular Ad-Hoc networks. IEEE Trans. Intell. Veh. 2023, 8, 616–627. [Google Scholar] [CrossRef]
- Bartoletti, S.; Decarli, N.; Masini, B.M. Sidelink 5G-V2X for integrated sensing and communication: The impact of resource allocation. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022. [Google Scholar]
- Decarli, N.; Bartoletti, S.; Bazzi, A.; Stirling-Gallacher, R.A.; Masini, B.M. Performance characterization of joint communication and sensing with beyond 5G NR-V2X sidelink. IEEE Trans. Veh. Technol. 2024, 73, 10044–10059. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, W.; Li, L.; Zhang, J.; Angelopoulos, C.M. Intelligent predictive beamforming for integrated sensing and communication based vehicular-to-infrastructure systems. In Proceedings of the 2023 IEEE Globecom Workshops (GC Wkshps), Kuala Lumpur, Malaysia, 4–8 December 2023. [Google Scholar]
- Lin, Y.; Ke, F.; Chen, M.; Qin, M.; Lee, Y.L.; Li, D. Joint communication, sensing and computing for V2I networks. In Proceedings of the 2023 IEEE 98th Vehicular Technology Conference (VTC2023-Fall), Hong Kong, China, 10–13 October 2023. [Google Scholar]
- Fan, W.; Su, Y.; Liu, J.; Li, S.; Huang, W.; Wu, F.; Liu, Y. Joint task offloading and resource allocation for vehicular edge computing based on V2I and V2V models. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4277–4292. [Google Scholar] [CrossRef]
- Ghafoor, K.Z.; Kong, L.; Zeadally, S.; Sadiq, A.S.; Epiphaniou, G.; Hammoudeh, M.; Bashir, A.K.; Mumtaz, S. Millimeter-wave communication for internet of vehicles: Status challenges and perspectives. IEEE Internet Things 2020, 7, 8525–8546. [Google Scholar] [CrossRef]
- Xiao, Z.; Qi, C.; Nie, J. Beam tracking based on variable step beam for millimeter wave massive MIMO. IEEE Commun. Lett. 2023, 27, 2417–2421. [Google Scholar] [CrossRef]
- Chen, K.; Qi, C.; Wang, C.X.; Li, G.Y. Beam training and tracking for extremely large-scale MIMO communications. IEEE Trans. Wirel. Commun. 2024, 23, 5048–5062. [Google Scholar] [CrossRef]
- Yang, S.; Ma, J.; Zhang, S.; Li, H. Beam prediction for mmWave massive MIMO using adjustable feature fusion learning. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022. [Google Scholar]
- Gonzalez-Prelcic, N.; Mendez-Rial, R.; Heath, R.W. Radar aided beam alignment in mmwave V2I communications supporting antenna diversity. In Proceedings of the Information Theory and Applications Workshop (ITA), La Jolla, CA, USA, 31 January–5 February 2016. [Google Scholar]
- Heath, R.W.; Gonzlez-Prelcic, N.; Rangan, S.; Roh, W.; Sayeed, A.M. An overview of signal processing techniques for millimeter wave MIMO systems. IEEE J. Sel. Top. Signal Process. 2016, 10, 436–453. [Google Scholar] [CrossRef]
- Zhang, D.; Li, A.; Shirvanimoghaddam, M.; Cheng, P.; Li, Y.; Vucetic, B. Codebook-Based training beam sequence design for millimeter-wave tracking systems. IEEE Trans. Wirel. Commun. 2019, 18, 5333–5349. [Google Scholar] [CrossRef]
- Shaham, S.; Ding, M.; Kokshoorn, M.; Lin, Z.; Dang, S.; Abbas, R. Fast channel estimation and beam tracking for millimeter wave vehicular communications. IEEE Access 2019, 7, 141104–141118. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C. A tutorial on joint radar and communication transmission for vehicular networks-Part I: Background and fundamentals. IEEE Commun. Lett. 2020, 25, 322–326. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Hyun, S.-H.; Song, J.; Kim, K.; Lee, J.H.; Kim, S.C. Adaptive beam design for V2I communications using vehicle tracking with extended kalman filter. IEEE Trans. Veh. Technol. 2022, 71, 489–502. [Google Scholar] [CrossRef]
- Du, Z.; Liu, F.; Yuan, W.; Masouros, C.; Zhang, Z.; Xia, S. Integrated sensing and communications for V2I networks: Dynamic predictive beamforming for extended vehicle targets. IEEE Trans. Wirel. Commun. 2023, 22, 3612–3627. [Google Scholar] [CrossRef]
- Meng, X.; Liu, F.; Masouros, C.; Yuan, W.; Zhang, Q.; Feng, Z. Vehicular connectivity on complex trajectories: Roadway-geometry aware ISAC beam tracking. IEEE Trans. Wirel. Commun. 2023, 22, 7408–7423. [Google Scholar] [CrossRef]
- Yuan, W.; Liu, F.; Masouros, C.; Yuan, J.; Ng, D.W.K.; González-Prelcic, N. Bayesian predictive beamforming for vehicular networks: A low-overhead joint radar communication approach. IEEE Trans. Wirel. Commun. 2020, 20, 1442–1456. [Google Scholar] [CrossRef]
- Liu, F.; Yuan, W.; Masouros, C.; Yuan, J. Radar-Assisted predictive beamforming for vehicular links: Communication served by sensing. IEEE Trans. Wirel. Commun. 2020, 19, 7704–7719. [Google Scholar] [CrossRef]
- Liu, C.; Yuan, W.; Liu, S.; Liu, X.; Li, H.; Ng, D.W.K.; Li, Y. Learning-Based predictive beamforming for integrated sensing and communication in vehicular networks. IEEE J. Sel. Areas Commun. 2022, 40, 2317–2334. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the 1st Conference on Robot Learning (CoRL), Mountain View, CA, USA, 13–15 November 2017. [Google Scholar]
- Stepanyants, V.G.; Romanov, A.Y. Influence of realistic perception and surroundings on qualitative results in automated and connected vehicle simulation. IEEE Access 2024, 12, 43721–43733. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wiessner, E. Microscopic traffic simulation using sumo. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HA, USA, 4–7 November 2018. [Google Scholar]
- Xu, R.; Xiang, H.; Han, X.; Xia, X.; Meng, Z.; Chen, C.J.; Correa-Jullian, C.; Ma, J. The OpenCDA open-source ecosystem for cooperative driving automation research. IEEE Trans. Intell. Veh. 2023, 8, 2698–2711. [Google Scholar] [CrossRef]
- Chen, X.; Feng, Z.; Wei, Z.; Zhang, J.A.; Yuan, X.; Zhang, P. Concurrent downlink and uplink joint communication and sensing for 6G networks. IEEE Trans. Veh. Technol. 2023, 72, 8175–8180. [Google Scholar] [CrossRef]
- Chen, X.; Feng, Z.; Zhang, J.A.; Wei, Z.; Yuan, X.; Zhang, P.; Peng, J. Downlink and uplink cooperative joint communication and sensing. IEEE Trans. Veh. Technol. 2024, 1–15, early access. [Google Scholar]
- Stepanyants, V.; Romanov, A. An object-oriented approach to a structured description of machine perception and traffic participant interactions in traffic scenarios. In Proceedings of the 2022 IEEE 7th International Conference on Intelligent Transportation Engineering (ICITE), Beijing, China, 11–13 November 2022. [Google Scholar]
- Scholtes, M.; Westhofen, L.; Turner, L.R.; Lotto, K.; Schuldes, M.; Weber, H.; Wagener, N.; Neurohr, C.; Bollmann, M.H.; Körtke, F.; et al. 6-Layer model for a structured description and categorization of urban traffic and environment. IEEE Access 2021, 9, 59131–59147. [Google Scholar] [CrossRef]
- Basar, E. Reconfigurable intelligent surface-based index modulation: A new beyond MIMO paradigm for 6G. IEEE Trans. Commun. 2020, 68, 3187–3196. [Google Scholar] [CrossRef]
- 3GPP TS 38.306:NR; User Equipment Radio Access Capabilities. 3rd Generation Partnership Project. Sophia Antipolis: Valbonne, France, 2018.
- 3GPP TS 38.211: NR; Physical Channels and Modulation. European Telecommunications Standards Institute, Sophia Antipolis: Valbonne, France, 2022.




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, J.; Wang, Z.; Zhang, C.; Hui, H. Adaptive Frame Structure Design for Sensing-Assisted Downlink Communication in the Vehicle-to-Infrastructure Scenario. Sensors 2024, 24, 5061. https://doi.org/10.3390/s24155061
Yao J, Wang Z, Zhang C, Hui H. Adaptive Frame Structure Design for Sensing-Assisted Downlink Communication in the Vehicle-to-Infrastructure Scenario. Sensors. 2024; 24(15):5061. https://doi.org/10.3390/s24155061
Chicago/Turabian StyleYao, Junliang, Ze Wang, Chunli Zhang, and Hui Hui. 2024. "Adaptive Frame Structure Design for Sensing-Assisted Downlink Communication in the Vehicle-to-Infrastructure Scenario" Sensors 24, no. 15: 5061. https://doi.org/10.3390/s24155061