
Optimization of Fuzzy Control Parameters for Wind Farms and Battery Energy Storage Systems Based on an Enhanced Artificial Bee Colony Algorithm under Multi-Source Sensor Data

Abstract
:1. Introduction
- (1)
- This paper proposes a coordinated and unified control model for wind farms and BESSs. The fuzzy control dynamic adjustment system is applied to adjust the primary frequency modulation coefficient.
- (2)
- The ABC algorithm is used to design the optimal fuzzy logic controller to enhance the frequency control performance of the energy storage module.
- (3)
- The ABC algorithm is improved to enhance the accuracy and speed of the algorithm.
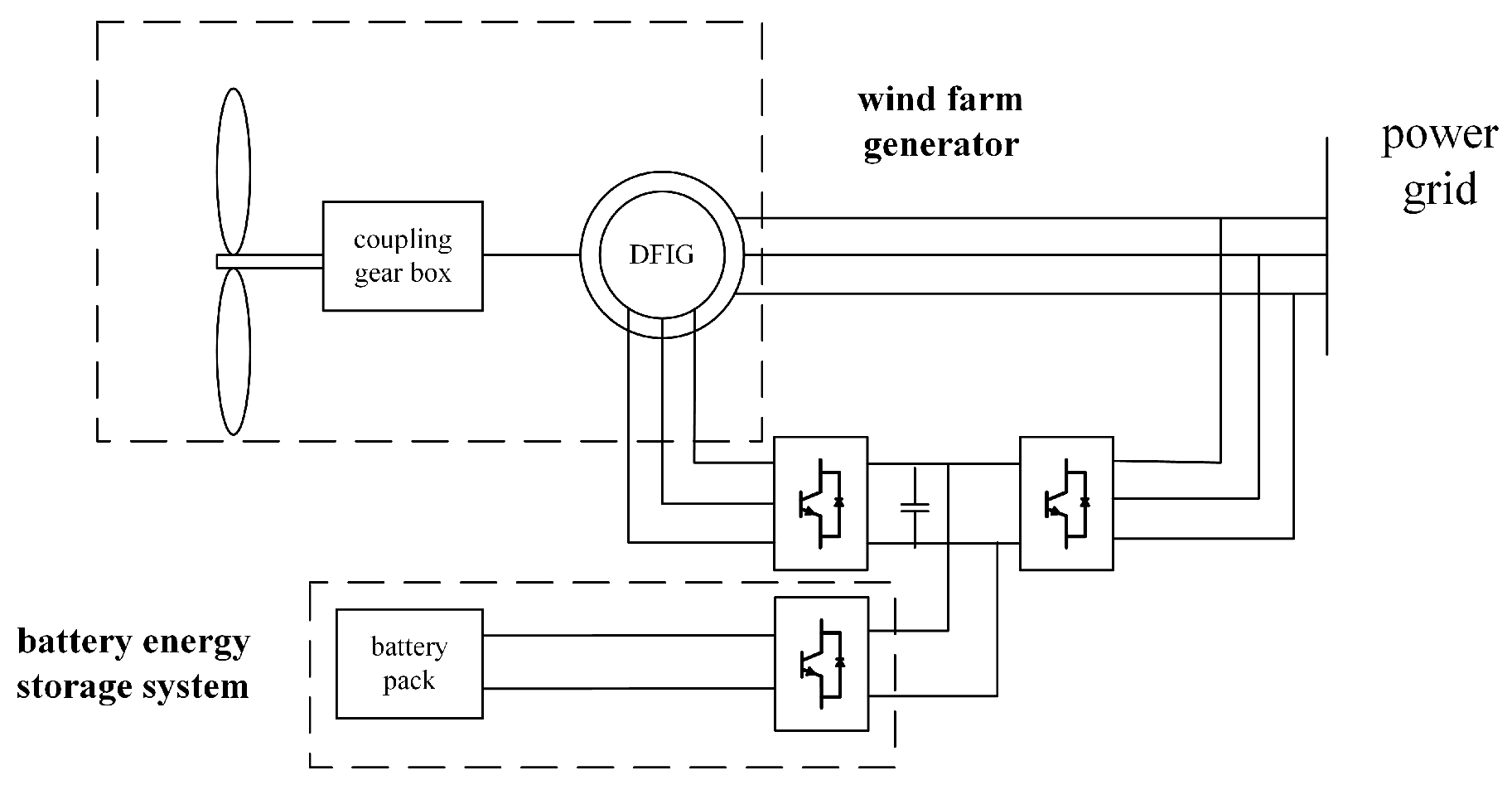
2. Coordinated Primary Frequency Modulation Control Strategy of a Wind Farm and a BESS
2.1. Frequency Domain Analysis of a Coordinated Frequency System of a DFIG and a BESS
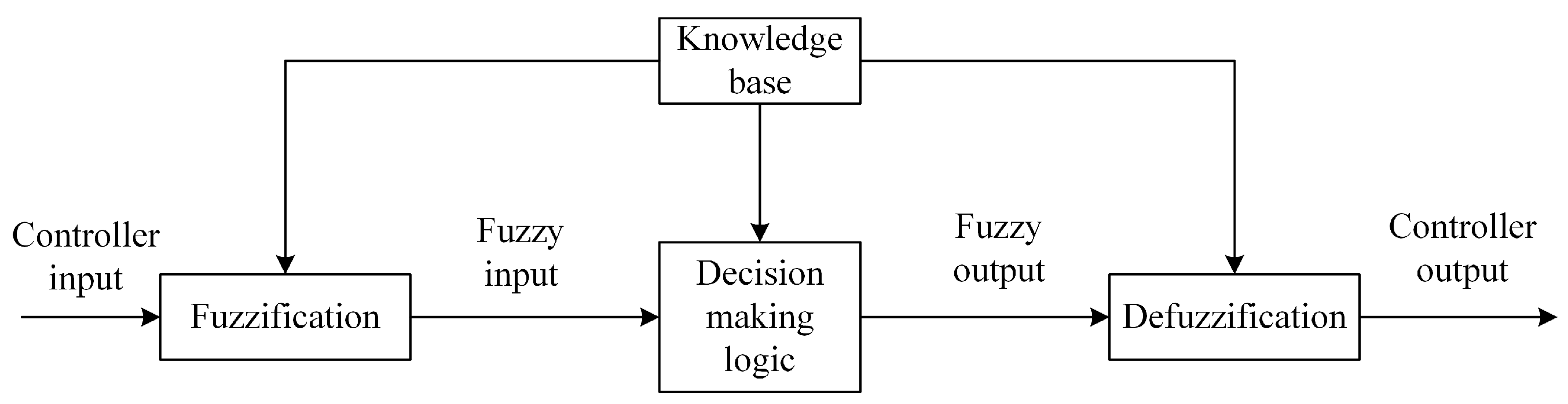
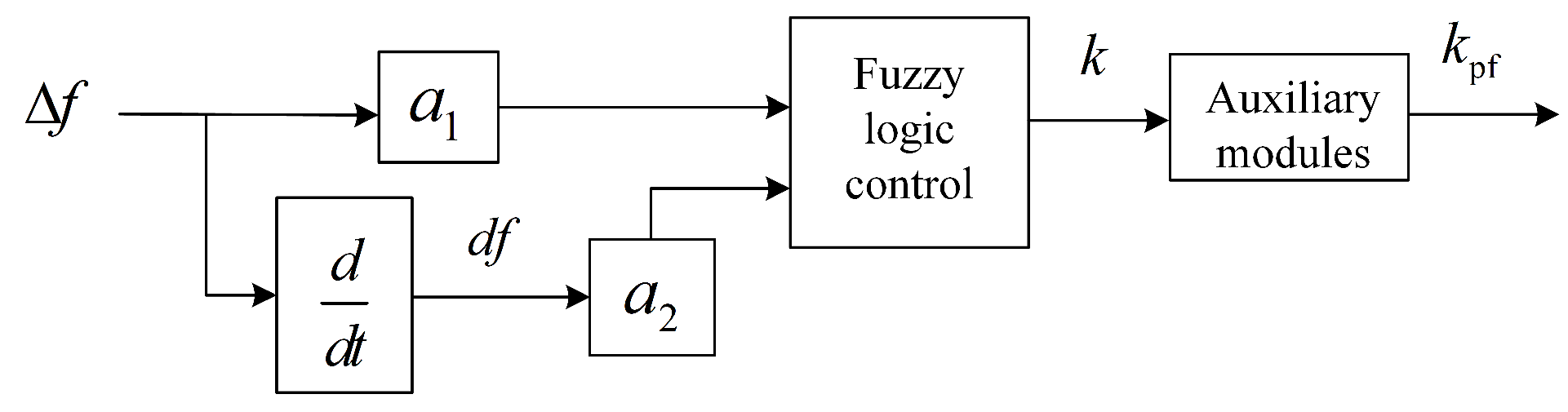
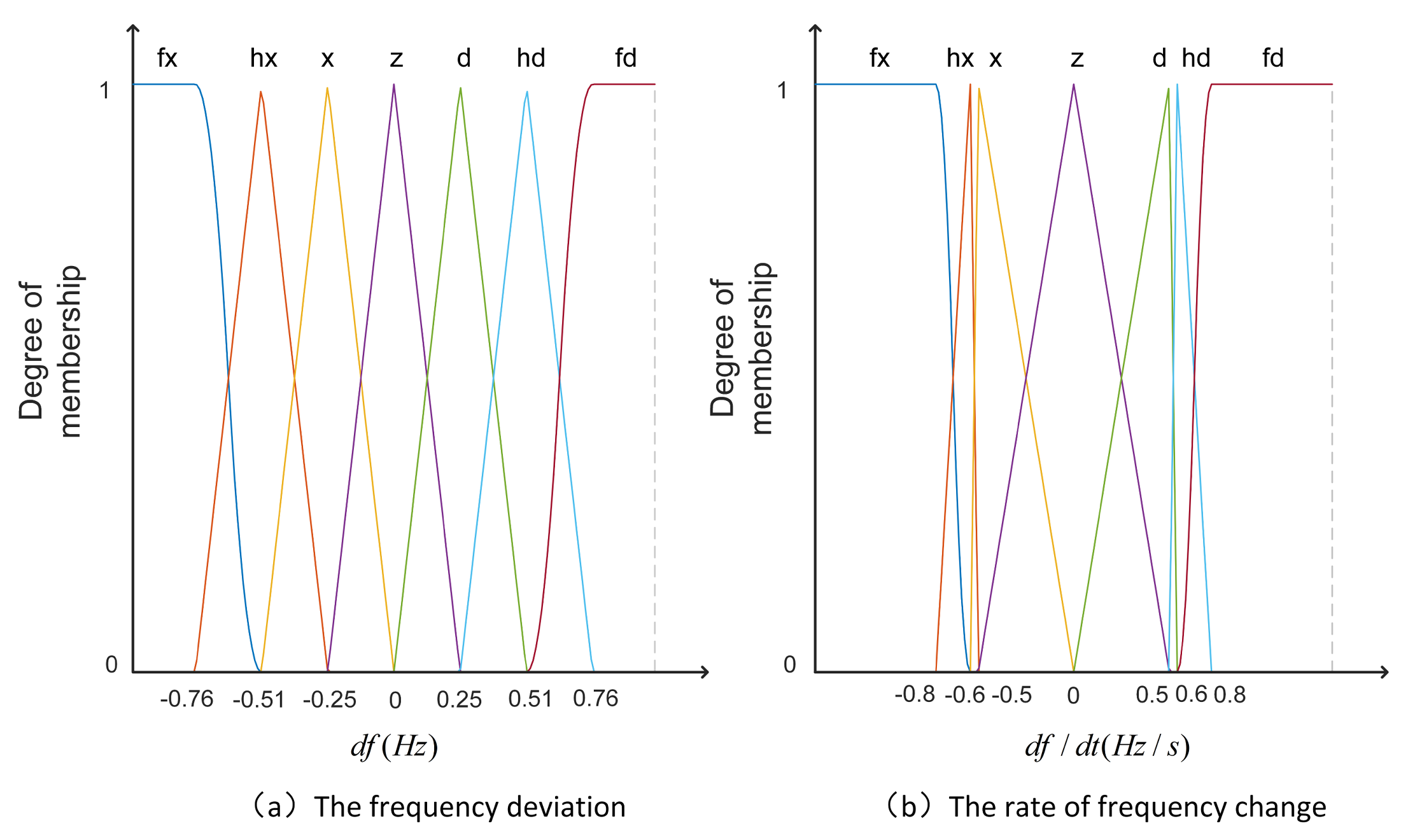
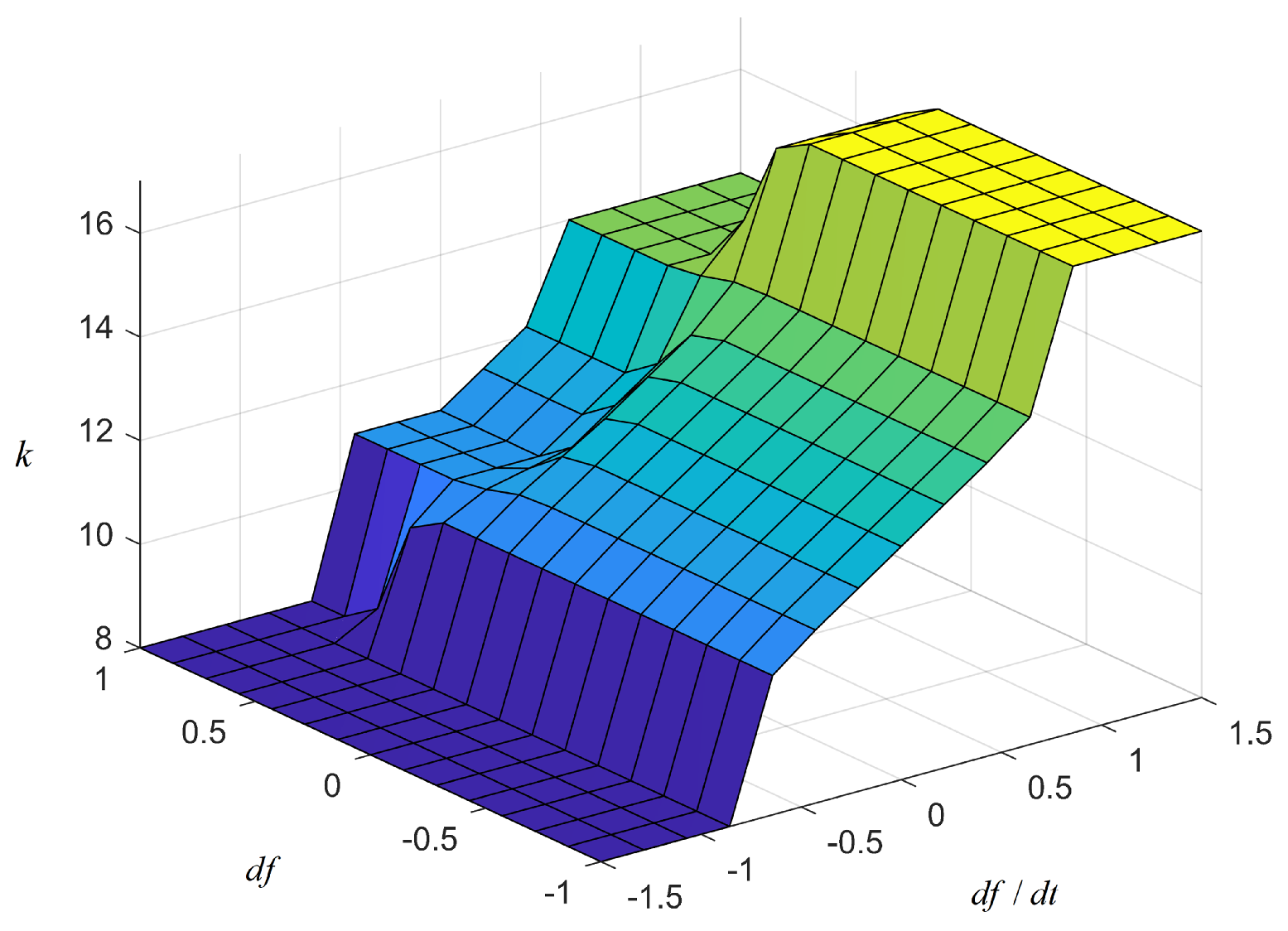
2.2. Designed Fuzzy Controller for a Coordinated System of a Wind Farm and a BESS
3. Improved ABC Algorithm to Optimize Fuzzy Control
3.1. Improved ABC Algorithm
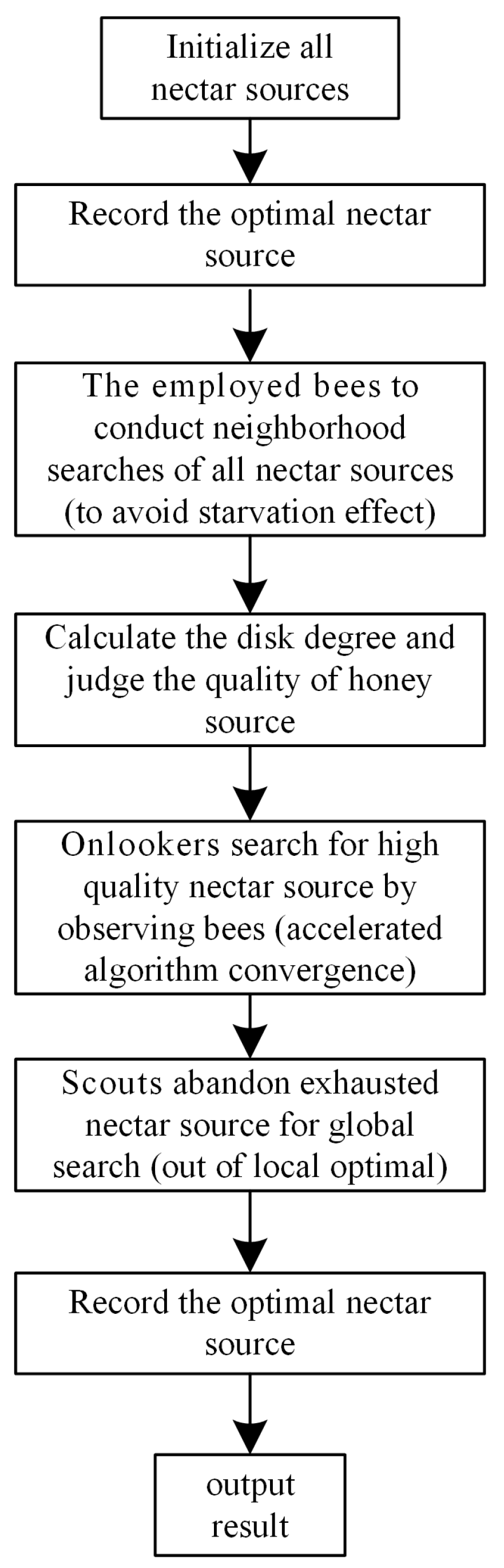
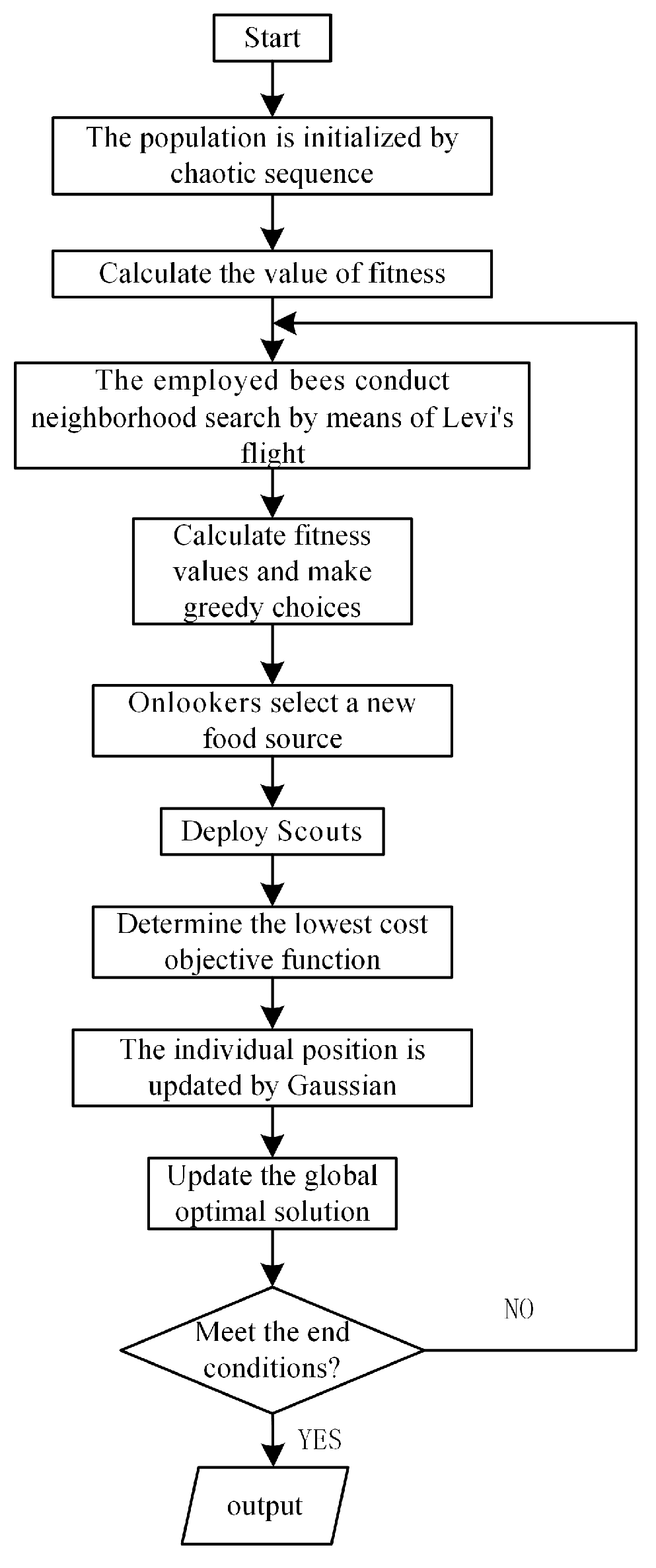
- (1)
- The employed bees. Compare the random initial solution created by the ABC algorithm with the newly discovered solution, and preserve the solution with high nectar content, where is the number of employed bees and is the D-dimensional vector. D represents the parameters to be optimized.Introduce Lévy flight into the ABC to expand the search space and enhance the global search capability. The Lévy distribution is (10).where u and t are parameters that obey the normal distribution. is a number in the range [1, 3].
- (2)
- Onlookers. Select a new solution. Each onlooker bee searches according to the solution of the employed bee. The probability of onlookers choosing the food source is calculated as follows:The search for a new solution can be calculated using (12).where is the new solution after selective processing, while and are randomly selected numbers. () is the total number of food source locations.The multiplier () is a random number. In other words, is the j-th parameter of solution which is chosen to be modified.By introducing the control parameter modification rate , when is too large, the improvement effect of the algorithm is not obvious, and the optimization effect of the algorithm is too small. We update the solution when the uniformly distributed random number is less than . In other cases, the new solution does not change. The convergence speed of the algorithm is improved by improving the search formula of the solution.
- (3)
- Scouts. If the employed bees and the onlookers do not find a better solution during the search, they become scouts. Each scout randomly selects a new solution in the solution space and updates the current optimal solution. If a new solution generated by a scout bee is better than the current optimal solution, the new solution will be replaced with the current optimal solution. The new solution can be calculated by (13).where r is a random number between [−1, 1]; and are the upper and lower bounds of the j-th dimension.
- (1)
- Population size consists of the number of employed bees and onlookers;
- (2)
- The limit value, which is the number of trials in which the location of the food source is abandoned;
- (3)
- The maximum number of cycles, MCN.
3.2. Fuzzy Controller Parameter Optimization Based on the ABC Algorithm
4. Simulation and Analysis
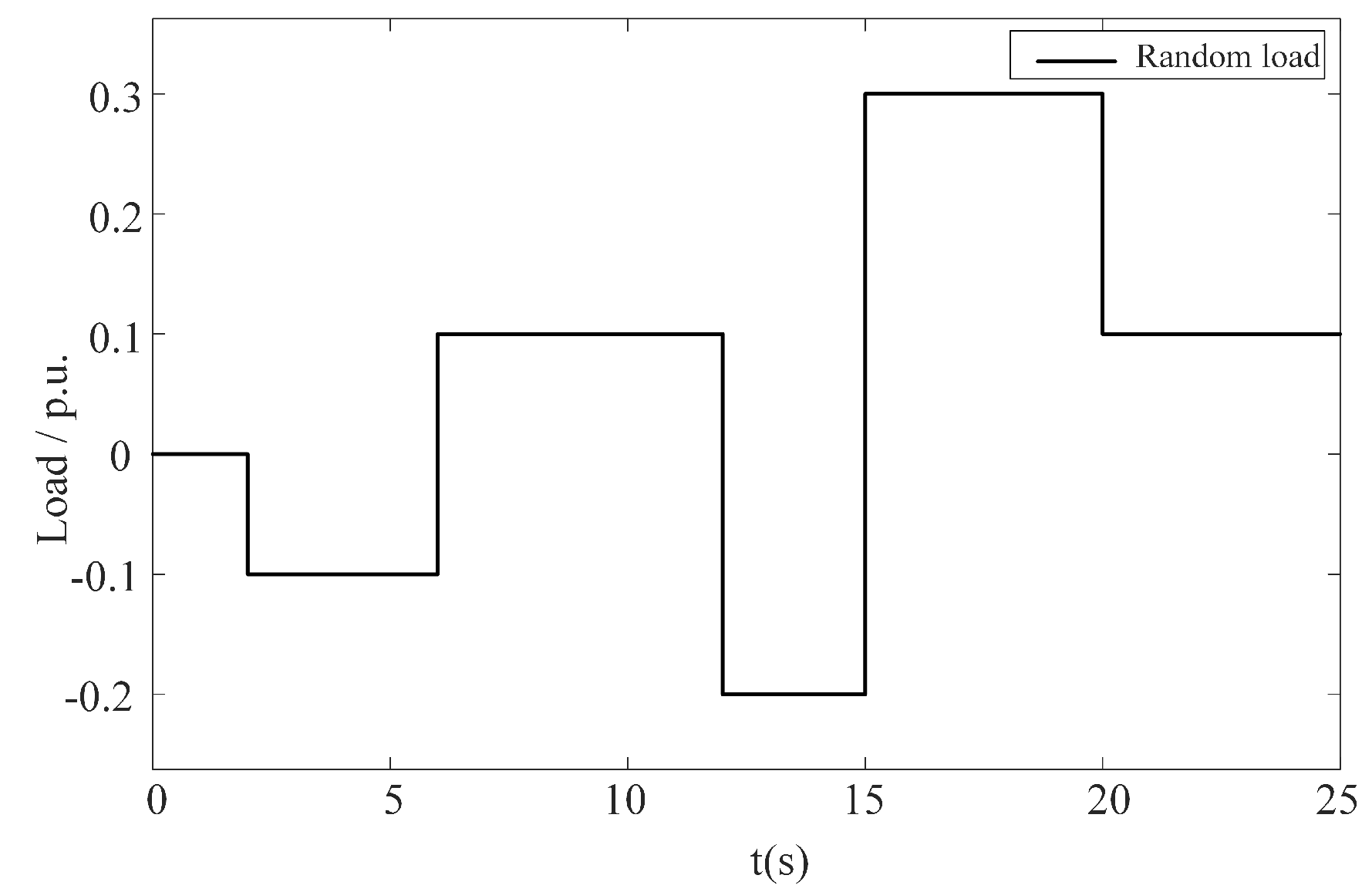
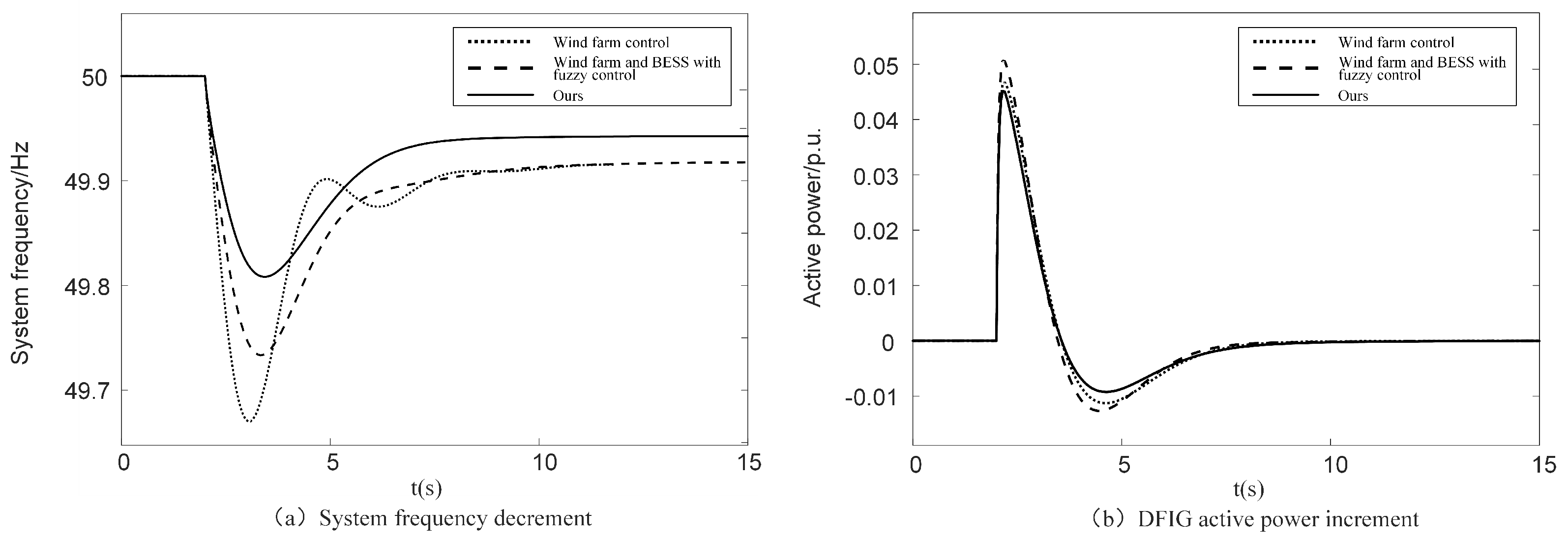
4.1. Simulation Analysis of Coordinated System of Wind Farm and BESS at Medium Wind Speed
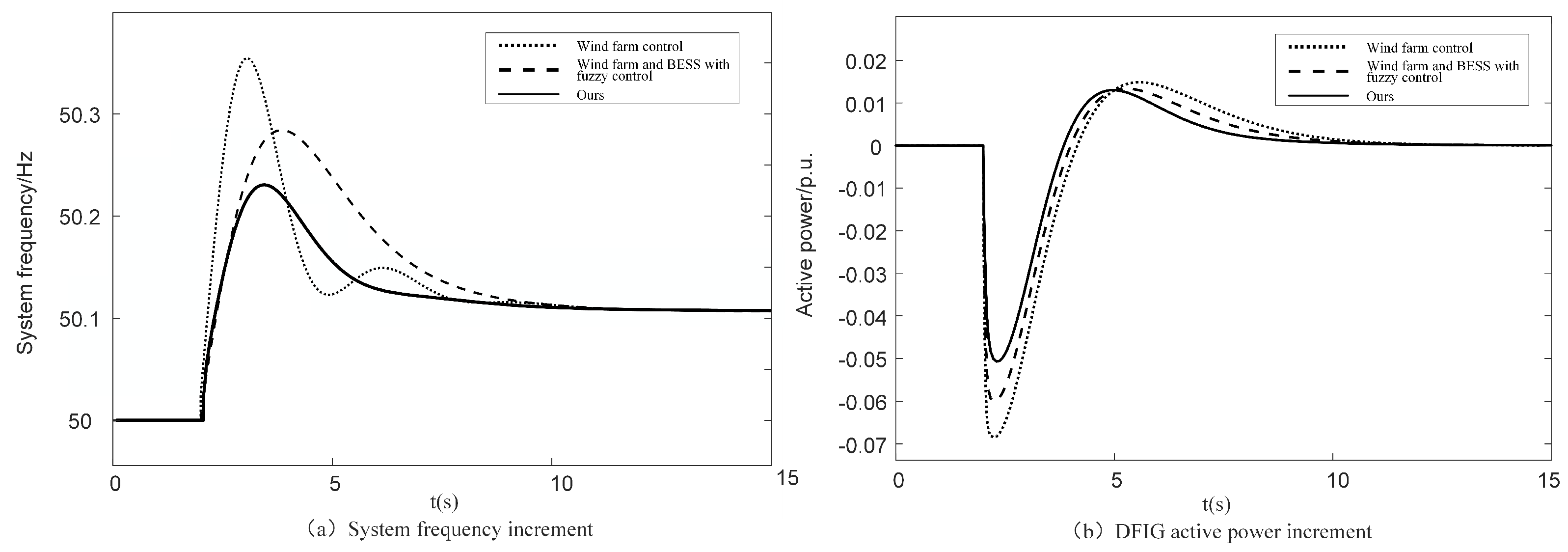
4.2. Simulation Analysis of Coordinated System of Wind Farm and BESS at Low Wind Speed
5. Discussion
- (1)
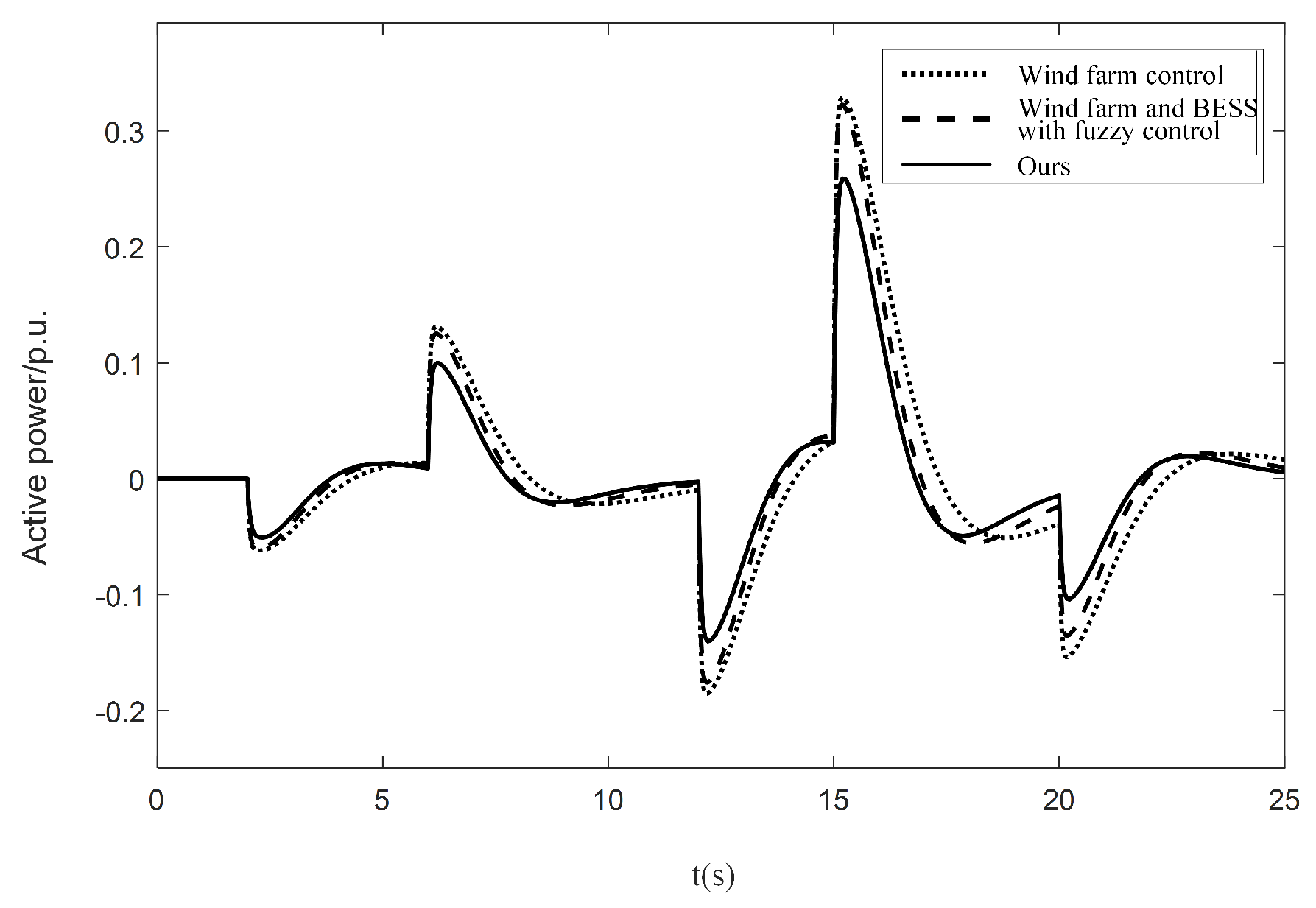
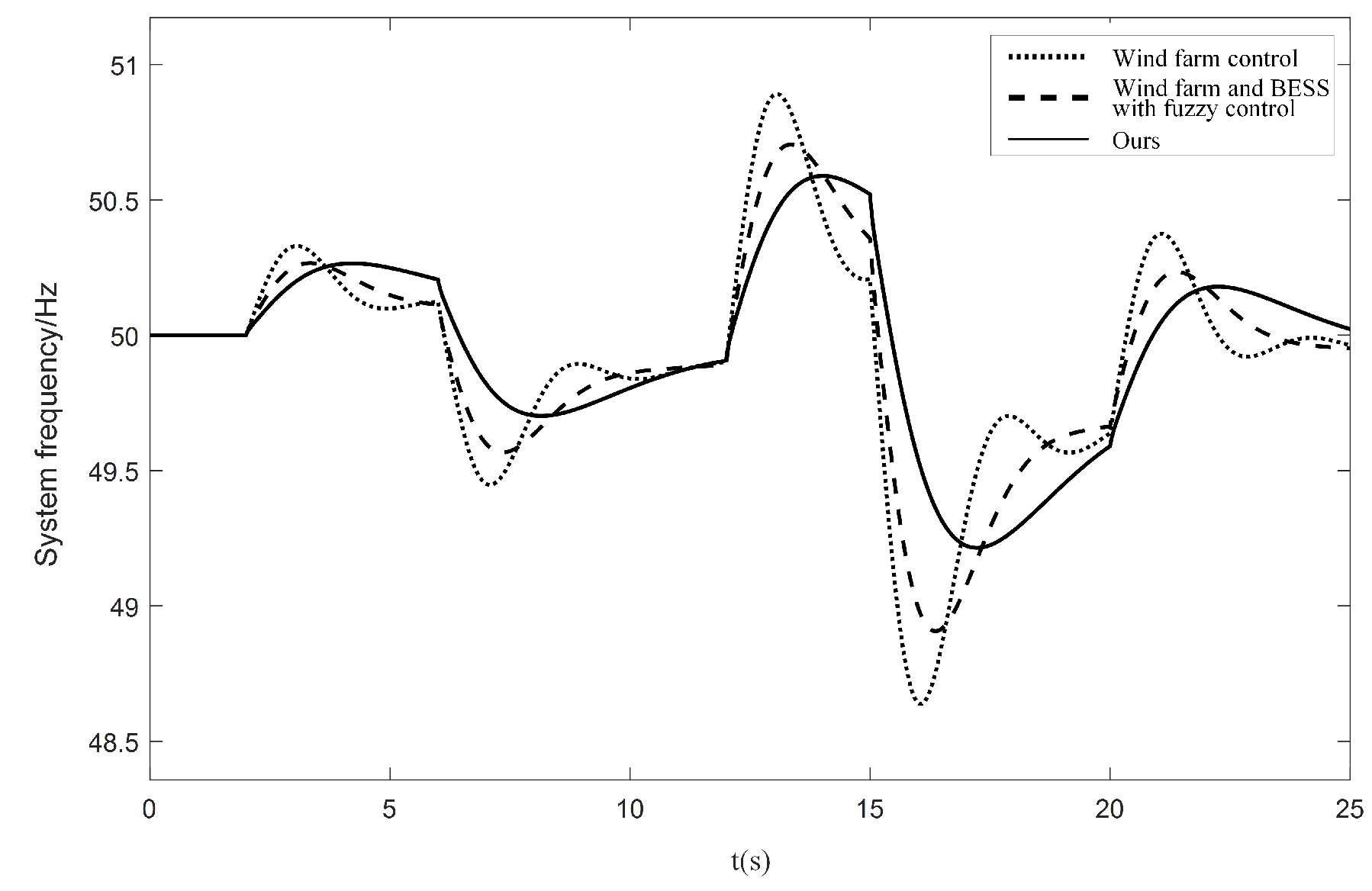
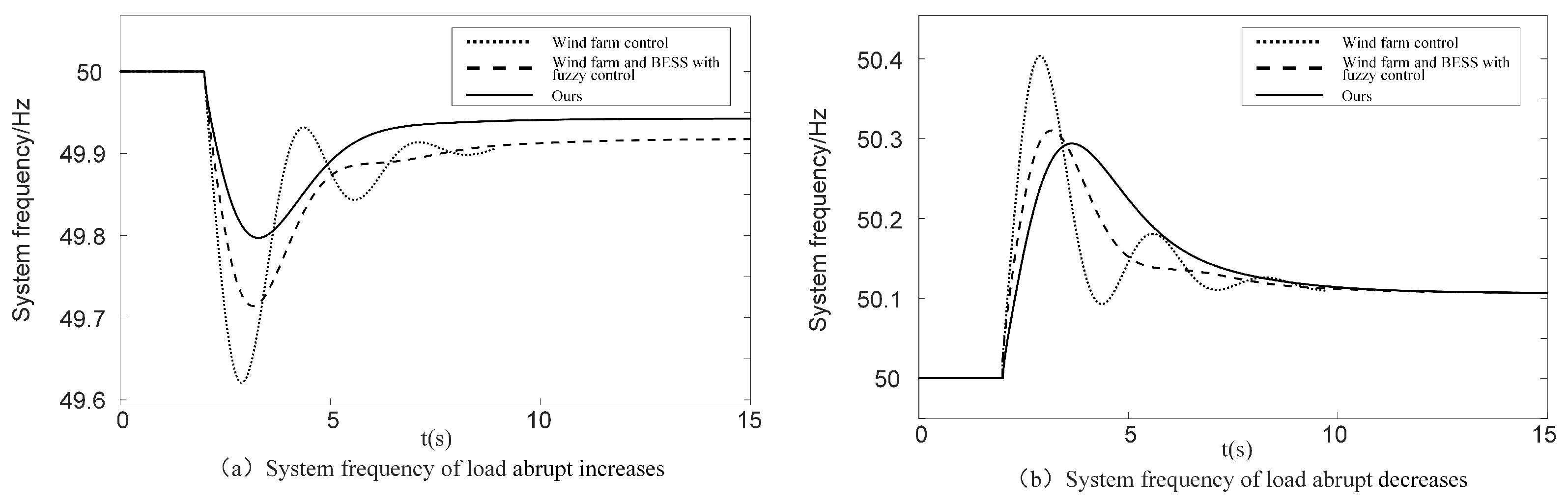
- The frequency modulation method proposed in this paper is compared with the frequency modulation of the wind farm with the addition of fuzzy control, but the waveform is not optimized. It is concluded that fuzzy control is added, and the ABC algorithm is used to optimize the frequency response speed. This method significantly improves the frequency stability of the system.
- (2)
- In this paper, the Gaussian walk mechanism is introduced into the ABC algorithm to optimize the artificial ant colony algorithm to improve the convergence speed. The ABC algorithm under multi-source sensor data provides great improvement for the performance of the proposed fuzzy controller. The ABC algorithm greatly simplifies the correction steps of the fuzzy logic functions.
- (3)
- This article proposes an intelligent algorithm to optimize the frequency conversion strategy of wind farms and BESSs based on multi-source data consisting of wind speed and frequency. This aims to provide more accurate and reliable frequency regulation services for integrating renewable energy into the grid. It contributes to the automation and informatization of microgrids. With the development of monitoring and transmission equipment such as sensors, frequency regulation control will become more precise and rapid. Moreover, it enhances the intelligence and operational efficiency of the distribution network, ensuring the stability and continuity of the power supply.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Wang, Y.H.; Jiao, B.Q.; Zhang, F.Q. Medium and Long-term Electric Power Development Considering Operating Characteristics of High Proportion of Renewable Energy. Autom. Electr. Power Syst. 2017, 41, 9–16. [Google Scholar]
- Wen, Y.F.; Yang, W.F.; Lin, X.H. Review and prospect of frequency stability analysis and control oflow-inertia power systems. Electr. Power Autom. Equip. 2020, 40, 211–222. [Google Scholar]
- Chi, Y.N.; Li, Q.Y.; Li, Y. Power System Operation and Stability Problems Caused by Integration ofLarge-scale Wind Power and Corresponding Solutions. Electr. Equip. 2008, 9, 16–19. [Google Scholar]
- Hu, Z.H.; Xia, R.; Wu, L.L. Joint Operation Optimization of Wind-Storage Union with Energy Storage Participating Frequency Regulation. Power Syst. Technol. 2016, 40, 2251–2257. [Google Scholar]
- Kuang, Z.; Wang, B.B. Optimization Strategy of Wind Storage Joint Operation Considering Energy Storage Life and Participating in Frequency Modulation Service. Power Gener. Technol. 2020, 41, 73–78. [Google Scholar]
- Zhang, X.L.; Qin, S.Q.; Zhang, Y.F. Wind Turbine and Storage Joint Frequency Modulation Control Strategy Considering Energy Storage State of Charge. HV Eng. 2023, 49, 4120–4130. [Google Scholar]
- Yang, D.J.; Wang, X.; Yan, G.G. Flexible Frequency Regulation Scheme of DFIG embed Battery Energy Storage System Considering Deadbands. Trans. China Electrotech. Soc. 2023, 38, 4646–4656. [Google Scholar]
- Wu, Z.P.; Gao, W.Z.; Zhang, H.G. Coordinated Control Strategy of Battery Energy Storage System and PMSG-WTG to Enhance System Frequency Regulation Capability. IEEE Trans. Sustain. Energy 2017, 8, 1330–1343. [Google Scholar] [CrossRef]
- Liu, H.; Ge, J.; Gong, Y. Optimization Scheme Selection of Wind Farm Participation in Grid Primary Frequency Modulation and Study of Wind-storage Coordination Control Strategy. J. Glob. Energy Interconnect. 2019, 2, 44–52. [Google Scholar]
- Wei, L.J.; Ye, H.; Chi, Y.N. Frequency Response Coordinated Control Strategy between Grid-forming Wind Turbine and Energy Storage Based on State Reconstruction. J. Glob. Energy Interconnect. 2023, 49, 5095–5104. [Google Scholar]
- Lin, C.H.; Yuan, K.W. Coordinated frequency control strategy for VSC-HVDC-connected wind farm and battery energy Storage system. IEEE Trans. Ind. Appl. 2023, 59, 5314–5328. [Google Scholar] [CrossRef]
- Choi, J.W.; Shin, Y.H.; Mun, K.K. Hybrid operation strategy of wind energy storage system for power grid frequency regulation. IET Gener. Transm. Distrib. 2023, 10, 736–749. [Google Scholar] [CrossRef]
- Yan, Q.C.; Gu, W.; Fan, L.X. Energy Storage Assists Wind Turbines to Participate in Grid Frequency Regulation Control Strategy Research. Mod. Electr. Power. 2022, 39, 537–546. [Google Scholar]
- Lu, X.Y.; Yang, P.H.; Kang, L. Strategy of Primary Frequeney Regulation Assisted by Integrating Wind Turbines withEnergy Storage Batteriesy for Power System. Electr. Eng. 2023, 20, 57–59+145. [Google Scholar]
- Zhu, Y.; Qin, L.K.; Yan, Q.C. Wind-storage combined frequency regulation strategy and optimal configuration method of energy storage system considering process of frequency response. Electr. Power Autom. Equip. 2021, 41, 28–35. [Google Scholar]
- Zhao, X.L.; Lin, P.; Fu, B. Primary Frequency Regulation Control Strategy with Wind-Storage Cooperation Based on Multi-Objective Optimization. South. Power Syst. Technol. 2022, 16, 68–76. [Google Scholar]
- Liu, Y.M.; Chen, L.; Wang, X.D. Mixed Energy Storage Participating in Capacity Optimization Configuration of Wind Power Primary Frequency Regulation. Low Volt. Appar. 2020, 55–63. [Google Scholar] [CrossRef]
- Dong, T.X.; Zhai, B.Y.; Li, X. Optimal Control Strategy for Combined Wind-storage System to Participate in Frequency Response. Power Syst. Technol. 2022, 46, 3980–3989. [Google Scholar]
- Abu-Mouti, F.S.; El-Hawary, M.E. Overview of Artificial Bee Colony (ABC) algorithm and its applications. In Proceedings of the 2012 IEEE International Systems Conference SysCon 2012, Vancouver, BC, Canada, 19–22 March 2012; pp. 1–6. [Google Scholar]
- Feng, G. A survey on analysis and design of model-based fuzzy control systems. IEEE Trans. Fuzzy Syst. 2006, 14, 676–697. [Google Scholar] [CrossRef]
- Elgammal, A.; Tagore, R. Optimal model predictive frequency control management of grid integration PV/wind/FC/storage battery based smart grid using multi objective particle swarm optimization MOPSO. WSEAS Trans. Electron. 2021, 12, 46–54. [Google Scholar] [CrossRef]
- Mendis, N.; Muttaqi, K.M.; Perera, S. Active power management of a super capacitor-battery hybrid energy storage system for standalone operation of DFIG based wind turbines. In Proceedings of the 2012 IEEE Industry Applications Society Annual Meeting, Las Vegas, NV, USA, 7–11 October 2012. [Google Scholar]
- Jiang, W.; Cheng, Z.L.; Liu, W.L. Method of heat storage of wind farm aid frequency modulation based on fuzzy logic. Electr. Eng. 2019, 41–47. [Google Scholar] [CrossRef]
- Chen, J.H.; Yuan, T.; Tong, X. Coordinated Control Strategy of Wind Energy Storage Systems Based on Fuzzy Control. Mod. Electr. Power. 2024, 1–9. [Google Scholar] [CrossRef]
- Miao, L.; Wen, J.; Xie, H.; Yue, C.; Lee, W.J. Coordinated Control Strategy of Wind Turbine Generator and Energy Storage Equipment for Frequency Support. IEEE Trans. Ind. Appl. 2015, 51, 2732–2742. [Google Scholar] [CrossRef]
- Zhang, S.Q.; Yateendra, M.; Mohammad, S. Fuzzy-Logic Based Frequency Controller for Wind Farms Augmented with Energy Storage Systems. IEEE Trans. Power Syst. 2016, 31, 1595–1603. [Google Scholar] [CrossRef]
- Shang, Q.Y.; Li, F.T.; Wang, S. Primary Frequency Modulation Strategy for Wind-storage Combined System Based on Multivariable Fuzzy Logic Control. Power Syst. Technol. 2023, 47, 2344–2360. [Google Scholar]
- Kavousighahfarokhi, A.; Radzi, M.A.M.; Noorbakhsh, S.M.; Khorshidi, E.; Dastgerdi, P.H.; Harchegani, A.T. Optimizing DC Microgrid: Fuzzy PI Controller with Metaheuristic Energy Storage Management. 2023. Available online: https://www.researchsquare.com/article/rs-3758183/v1 (accessed on 10 March 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| fx | hx | x | z | d | hd | fd | |
|---|---|---|---|---|---|---|---|
| fd | hx | hx | hx | hx | hx | hx | hx |
| hx | x | x | x | x | x | x | hx |
| x | x | x | x | x | x | x | hx |
| z | z | z | z | z | z | x | x |
| d | d | d | d | d | d | z | z |
| hd | hd | hd | hd | hd | hd | d | d |
| fd | fd | fd | fd | fd | fd | hd | hd |
| Parameter | Parameter Symbol | Value |
|---|---|---|
| Damping characteristic | D | 2 |
| Rotor inertia response time constant | 0.1 | |
| Blade angle pitch control response time constant | 3 | |
| Energy storage response time constant | 0.3 | |
| system version | / | Window11 |
| CPU | / | Intel(R) Core(TM) i7-1065G7 |
| GPU | / | NVDIA GeForce RTX 3080 |
| Model of Frequency Control | The Lowest Frequency | Steady-State Frequency Deviation | Maximum Frequency Deviation |
|---|---|---|---|
| Ref. [14] | 49.66 | 0.09 | 0.34 |
| Ref. [28] | 49.73 | 0.09 | 0.27 |
| Ours | 49.81 | 0.07 | 0.19 |
| Model of Frequency Control | The Highest Frequency | Steady-State Frequency Deviation | Maximum Frequency Deviation |
|---|---|---|---|
| Ref. [14] | 50.35 | 0.09 | 0.35 |
| Ref. [28] | 50.28 | 0.09 | 0.28 |
| Ours | 50.23 | 0.09 | 0.23 |
| Model of Frequency Control | Frequency Extreme Points | Steady-State Frequency Deviation | Maximum Frequency Deviation | |
|---|---|---|---|---|
| Abrupt increases | Ref. [14] | 49.62 | 0.08 | 0.38 |
| Ref. [28] | 49.71 | 0.08 | 0.29 | |
| Ours | 49.80 | 0.06 | 0.20 | |
| Abrupt decreases | Ref. [14] | 50.41 | 0.12 | 0.41 |
| Ref. [28] | 50.31 | 0.12 | 0.31 | |
| Ours | 50.28 | 0.12 | 0.28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Yang, P.; Zhang, P.; Lin, X.; Wei, J.; Li, N. Optimization of Fuzzy Control Parameters for Wind Farms and Battery Energy Storage Systems Based on an Enhanced Artificial Bee Colony Algorithm under Multi-Source Sensor Data. Sensors 2024, 24, 5115. https://doi.org/10.3390/s24165115
Liu Z, Yang P, Zhang P, Lin X, Wei J, Li N. Optimization of Fuzzy Control Parameters for Wind Farms and Battery Energy Storage Systems Based on an Enhanced Artificial Bee Colony Algorithm under Multi-Source Sensor Data. Sensors. 2024; 24(16):5115. https://doi.org/10.3390/s24165115
Chicago/Turabian StyleLiu, Zejian, Ping Yang, Peng Zhang, Xu Lin, Jiaxi Wei, and Ning Li. 2024. "Optimization of Fuzzy Control Parameters for Wind Farms and Battery Energy Storage Systems Based on an Enhanced Artificial Bee Colony Algorithm under Multi-Source Sensor Data" Sensors 24, no. 16: 5115. https://doi.org/10.3390/s24165115