
A Modified EMD Technique for Broken Rotor Bar Fault Detection in Induction Machines



Abstract
1. Introduction
2. The Proposed MEMD Technique for BRB Fault Detection
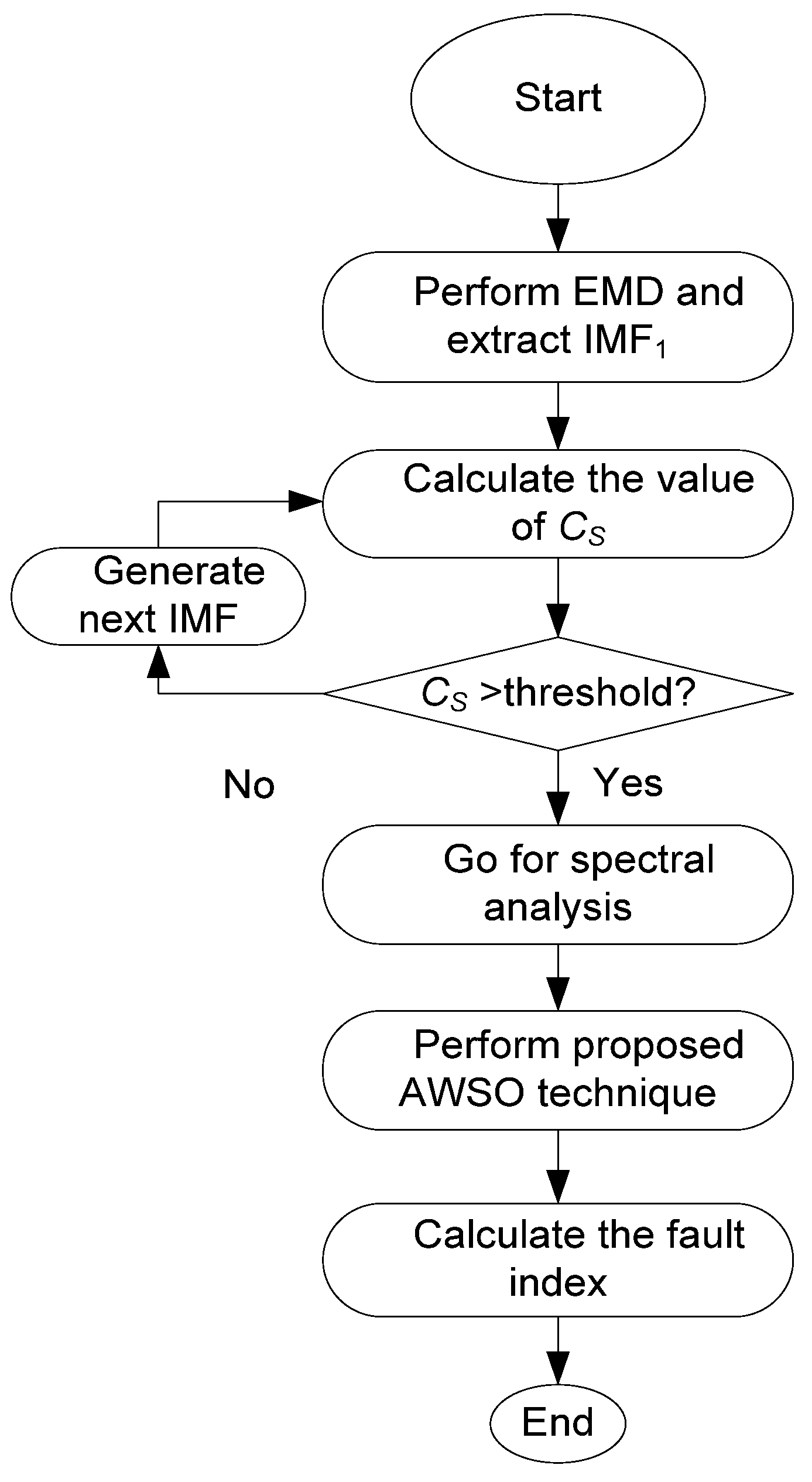
2.1. The Adaptive EMD Technique for IMF Selection
- (1)
- The difference between the number of extrema and the number of zero-crossing points is either 0 or 1.
- (2)
- The mean value of the envelope due to the local maxima and local minima is zero.
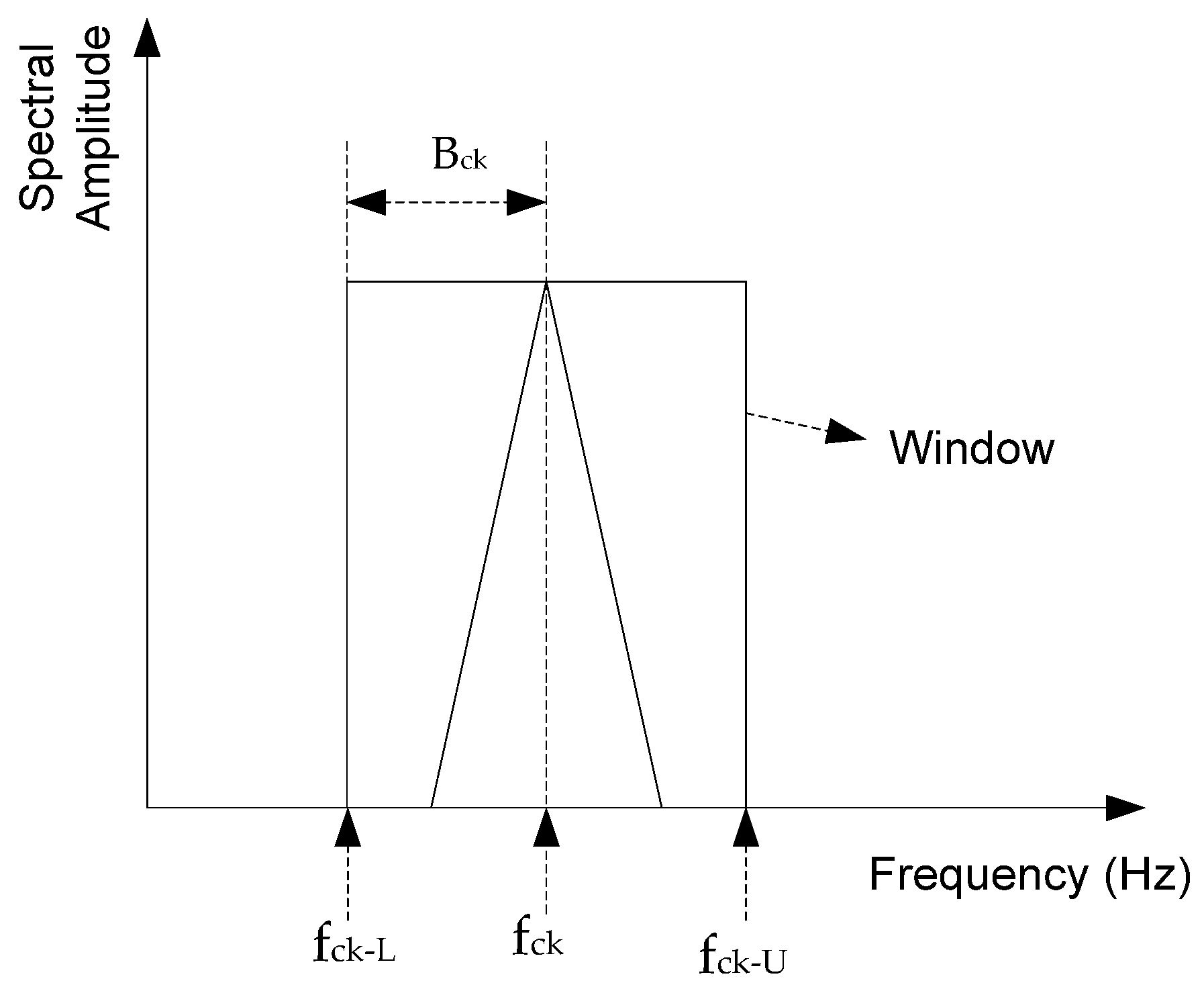
2.2. The Proposed AWSO Technique
2.3. The Proposed Post-Processing Function
3. Experimental Tests and Performance Analysis
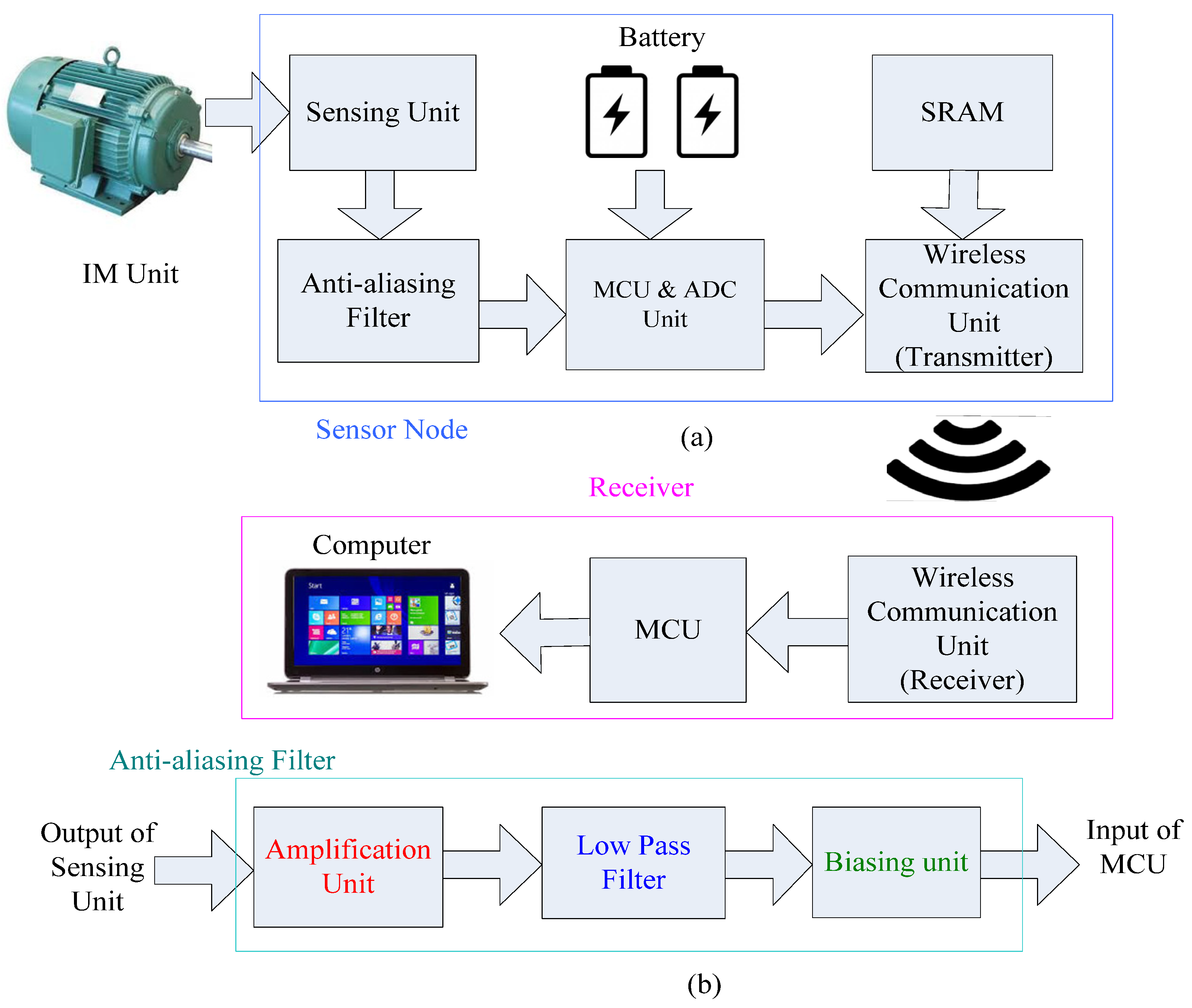
3.1. The Smart Current Sensors DAQ System
3.2. Experimental Setup
3.3. MEMD Parameter Selection
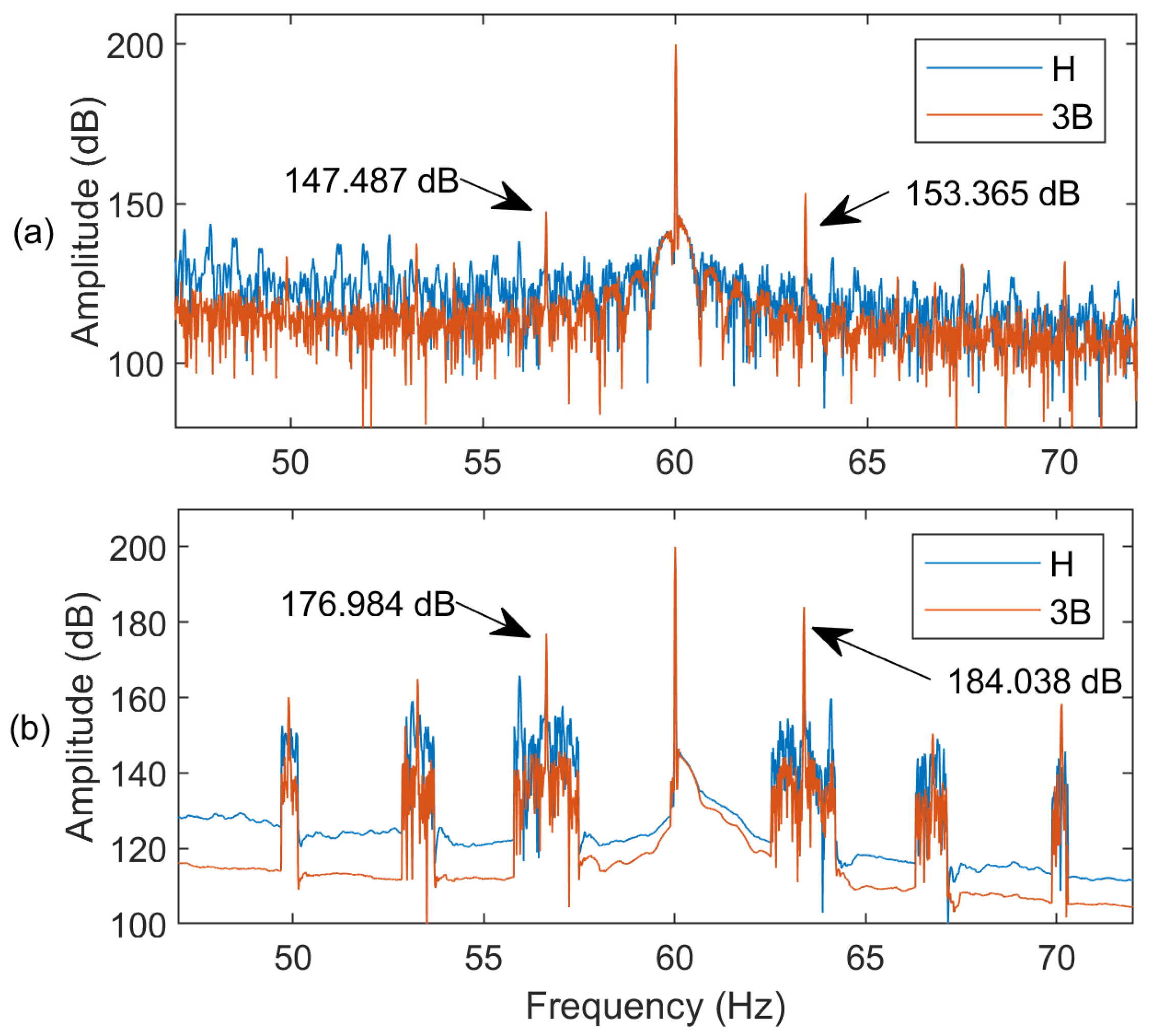
3.4. Experimental Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Halder, S.; Bhat, S.; Zychma, D.; Sowa, P. Broken Rotor Bar Fault Diagnosis Techniques Based on Motor Current Signature Analysis for Induction Motor—A Review. Energies 2022, 15, 8569. [Google Scholar] [CrossRef]
- Liang, X.; Ali, M.Z.; Zhang, H. Induction Motors Fault Diagnosis Using Finite Element Method: A Review. IEEE Trans. Ind. Appl. 2020, 56, 1205–1217. [Google Scholar] [CrossRef]
- Hassan, O.E.; Amer, M.; Abdelsalam, A.K.; Williams, B.W. Induction Motor Broken Rotor Bar Fault Detection Techniques Based on Fault Signature Analysis—A Review. IET Electr. Power Appl. 2018, 12, 895–907. [Google Scholar] [CrossRef]
- Panagiotou, P.A.; Arvanitakis, I.; Lophitis, N.; Antonino-Daviu, J.A.; Gyftakis, K.N. A New Approach for Broken Rotor Bar Detection in Induction Motors Using Frequency Extraction in Stray Flux Signals. IEEE Trans. Ind. Appl. 2019, 55, 3501–3511. [Google Scholar] [CrossRef]
- Zaman, S.M.K.; Marma, H.U.M.; Liang, X. Broken Rotor Bar Fault Diagnosis for Induction Motors Using Power Spectral Density and Complex Continuous Wavelet Transform Methods. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), IEEE, Edmonton, AB, Canada, 5 May 2019; pp. 1–4. [Google Scholar]
- Merabet, N.; Touil, A.; Babaa, F.; Abd Chibani, O.A. The Early Detection and Diagnosis of Broken Rotor Bar Faults in Induction Motor Using Torque and Speed Spectral Analysis. In Proceedings of the 2024 2nd International Conference on Electrical Engineering and Automatic Control (ICEEAC), Setif, Algeria, 12–14 May 2024; pp. 1–6. [Google Scholar]
- Sabbaghian-Bidgoli, F.; Poshtan, J. Fault Detection of Broken Rotor Bar Using an Improved Form of Hilbert–Huang Transform. Fluct. Noise Lett. 2018, 17, 1850012. [Google Scholar] [CrossRef]
- Ramu, S.K.; Irudayaraj, G.C.R.; Subramani, S.; Subramaniam, U. Broken Rotor Bar Fault Detection Using Hilbert Transform and Neural Networks Applied to Direct Torque Control of Induction Motor Drive. IET Power Electron. 2020, 13, 3328–3338. [Google Scholar] [CrossRef]
- Cherif, B.D.E.; Bendiabdellah, A.; Seninete, S. Induction Motor Diagnosis with Broken Rotor Bar Faults Using DWT Technique. In Proceedings of the 2021 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Kuala Lumpur, Malaysia, 12–13 June 2021; pp. 1–5. [Google Scholar]
- Mahmud, M.; Wang, W. A Smart Sensor-Based cEMD Technique for Rotor Bar Fault Detection in Induction Motors. IEEE Trans. Instrum. Meas. 2021, 70, 3523811. [Google Scholar] [CrossRef]
- Mahmud, M.; Wang, W. An Adaptive EMD Technique for Induction Motor Fault Detection. J. Signal Inf. Process. 2019, 10, 125–138. [Google Scholar] [CrossRef]
- Faiz, J.; Ghorbanian, V.; Ebrahimi, B.M. EMD-Based Analysis of Industrial Induction Motors with Broken Rotor Bars for Identification of Operating Point at Different Supply Modes. IEEE Trans. Ind. Inform. 2014, 10, 957–966. [Google Scholar] [CrossRef]
- Wang, H.; Kan, C.; Cai, M.; Zhao, Y.; Zhang, Z.; Sun, J.; Wu, H. Early Fault Diagnosis Method for Rotor Bar Breakage in Variable Frequency Motors Based on Improved SSA Parameter Optimization VMD Decomposition. In Proceedings of the 2024 9th Asia Conference on Power and Electrical Engineering (ACPEE), Shanghai, China, 11–13 April 2024; pp. 2072–2076. [Google Scholar]
- Abderrahmani, N.; Boumehraz, M.; Touba, M.M.; Gharsa, O.; Bellili, S.; Titaouine, A. Diagnosing Faults in Electrical Machines Using VMD: The Effect of the Sampling Frequancy. In Proceedings of the 2024 2nd International Conference on Electrical Engineering and Automatic Control (ICEEAC), Setif, Algeria, 12–14 May 2024; pp. 1–5. [Google Scholar]
- Bazghandi, R.; Marzebali, M.H.; Abolghasemi, V.; Kia, S.H. A Novel Mode Un-Mixing Approach in Variational Mode Decomposition for Fault Detection in Wound Rotor Induction Machines. Energies 2023, 16, 5551. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, X.; Wang, H.; Cao, L.; Xing, Z.; Yang, Z. Rotor Fault Diagnosis Method Based on VMD Symmetrical Polar Image and Fuzzy Neural Network. Appl. Sci. 2023, 13, 1134. [Google Scholar] [CrossRef]
- Alimardani, R.; Rahideh, A.; Kia, S.H. Mixed Eccentricity Fault Detection for Induction Motors Based on Time Synchronous Averaging of Vibration Signals. IEEE Trans. Ind. Electron. 2024, 71, 3173–3181. [Google Scholar] [CrossRef]
- Wang, P.; Wang, K.; Chen, L. Broken Rotor Bars Detection in Inverter-Fed Induction Motors under Continuous Switching of Different Speed Modes. IEEE Trans. Ind. Electron. 2024, 71, 975–984. [Google Scholar] [CrossRef]
- Ma, M.; Cao, Z.; Fu, H.; Xu, W.; Dai, J. Sparse Bayesian Learning Approach for Broken Rotor Bar Fault Diagnosis. IEEE Trans. Instrum. Meas. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Yepes, A.G.; Fonseca, D.S.B.; Antunes, H.R.P.; Lopez, O.; Cardoso, A.J.M.; Doval-Gandoy, J. Discrimination Between Eccentricity and Interturn Faults Using Current or Voltage-Reference Signature Analysis in Symmetrical Six-Phase Induction Machines. IEEE Trans. Power Electron. 2023, 38, 2421–2434. [Google Scholar] [CrossRef]
- Yatsugi, K.; Pandarakone, S.E.; Mizuno, Y.; Nakamura, H. Common Diagnosis Approach to Three-Class Induction Motor Faults Using Stator Current Feature and Support Vector Machine. IEEE Access 2023, 11, 24945–24952. [Google Scholar] [CrossRef]
- Zubčić, M.; Pavić, I.; Matić, P.; Polak, A. Broken Rotor Bar Detection Based on Steady-State Stray Flux Signals Using Triaxial Sensor with Random Positioning. Sensors 2024, 24, 3080. [Google Scholar] [CrossRef] [PubMed]
- Gu, B.-G. Development of Broken Rotor Bar Fault Diagnosis Method with Sum of Weighted Fourier Series Coefficients Square. Energies 2022, 15, 8735. [Google Scholar] [CrossRef]
- Sun, L.; Xu, B. An Improved Method for Discerning Broken Rotor Bar Fault and Load Oscillation in Induction Motors. Energies 2018, 11, 3130. [Google Scholar] [CrossRef]
- Singh, G.; Naikan, V. Detection of Half Broken Rotor Bar Fault in VFD Driven Induction Motor Drive Using Motor Square Current MUSIC Analysis. Mech. Syst. Signal Process. 2018, 110, 333–348. [Google Scholar] [CrossRef]
- Shukla, A.; Mahmud, M.; Wang, W.Q. A Smart Sensor-Based Monitoring System for Vibration Measurement and Bearing Fault Detection. Meas. Sci. Technol. 2020, 31, 105104. [Google Scholar] [CrossRef]
- Hosseinpour, Z.; Arefi, M.M.; Mozafari, N.; Luo, H.; Yin, S. An Ensemble-Based Fuzzy Rough Active Learning Approach for Broken Rotor Bar Detection in Nonstationary Environment. IEEE Trans. Instrum. Meas. 2022, 71, 2511808. [Google Scholar] [CrossRef]
- Elvira-Ortiz, D.A.; Morinigo-Sotelo, D.; Zorita-Lamadrid, A.L.; Osornio-Rios, R.A.; Romero-Troncoso, R.J. Genetic Algorithm Methodology for Broken Bar Detection in Induction Motor at Low Frequency and Load Operation. In Proceedings of the 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), IEEE, Toulouse, France, 27–30 August 2019; pp. 459–465. [Google Scholar]
- Chen, Y.; Li, L.; Li, W.; Guo, Q.; Du, Z.; Xu, Z. Chapter 2—Fundamentals of Neural Networks. In AI Computing Systems; Chen, Y., Li, L., Li, W., Guo, Q., Du, Z., Xu, Z., Eds.; Morgan Kaufmann: San Francisco, CA, USA, 2024; pp. 17–51. ISBN 978-0-323-95399-3. [Google Scholar]
- Luong, P.; Wang, W. Smart Sensor-Based Synergistic Analysis for Rotor Bar Fault Detection of Induction Motors. IEEE/ASME Trans. Mechatron. 2020, 25, 1067–1075. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loading | 60 Hz (3600 rpm) Operation | 50 Hz (3000 rpm) Operation | ||
|---|---|---|---|---|
| Speed (rpm) | Slip (%) | Speed (rpm) | Slip (%) | |
| No load (0% of full load) | 3586 | 0.4 | 2988 | 0.4 |
| Light load (33% of full load) | 3546 | 1.5 | 2946 | 1.8 |
| Medium load (67% of full load) | 3520 | 2.2 | 2928 | 2.4 |
| Full load | 3499 | 2.8 | 2910 | 3.0 |
| Loading Condition | HEALTH STATES | Computational Time (in Millisecond) for MEMD | Computational Time (in Millisecond) for EMD |
|---|---|---|---|
| No load (slip = 0.4%) | Healthy | 6.975 | 48.634 |
| 3BRB | 7.648 | 40.07 | |
| Light load (slip = 1.5%) | Healthy | 7.77 | 41.788 |
| 3BRB | 6.454 | 44.335 | |
| Medium load (slip = 2.2%) | Healthy | 7.632 | 67.225 |
| 3BRB | 7.917 | 45.326 | |
| Full load (slip = 2.8%) | Healthy | 9.256 | 53.924 |
| 3BRB | 6.674 | 47.742 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arifin, M.S.; Wang, W.; Uddin, M.N. A Modified EMD Technique for Broken Rotor Bar Fault Detection in Induction Machines. Sensors 2024, 24, 5186. https://doi.org/10.3390/s24165186
Arifin MS, Wang W, Uddin MN. A Modified EMD Technique for Broken Rotor Bar Fault Detection in Induction Machines. Sensors. 2024; 24(16):5186. https://doi.org/10.3390/s24165186
Chicago/Turabian StyleArifin, Md. Shamsul, Wilson Wang, and Mohammad Nasir Uddin. 2024. "A Modified EMD Technique for Broken Rotor Bar Fault Detection in Induction Machines" Sensors 24, no. 16: 5186. https://doi.org/10.3390/s24165186
APA StyleArifin, M. S., Wang, W., & Uddin, M. N. (2024). A Modified EMD Technique for Broken Rotor Bar Fault Detection in Induction Machines. Sensors, 24(16), 5186. https://doi.org/10.3390/s24165186