
Recursive Engine In-Cylinder Pressure Reconstruction Using Sensor-Fused Engine Speed


Abstract
:1. Introduction
- (1)
- Solely vibration-based reconstructionA fast pressure change in a cylinder during combustion leads to engine structural vibrations, which indicate that the engine structural vibration signal contains information related to the combustion process such that it has the potential to recover the cylinder pressure signal [7,8,9]. With the relationship between cylinder pressure and vibration, various cylinder pressure reconstruction approaches have been proposed, such as frequency response function-based approaches [10,11,12,13] and artificial neural network-based approaches [14,15].
- (2)
- Solely crank speed-based reconstructionThe engine crank speed fluctuation versus crank angle contains information about the cylinder-by-cylinder combustion pressure [16]. Many researchers have explored the relationship between speed fluctuation and cylinder pressure. In [17], the researchers made a model of the cylinder pressure signal using the crank angular speed from a statistical point of view. In [18], the researchers used the frequency response function between the cylinder pressure and the crank angular speed converted by a time-domain model and applied frequency response function mapping to improve the accuracy of cylinder pressure reconstruction under time-variant operating points. Based on the engine energy model, in [19,20], the authors used the extended sliding observer and the Kalman filter, respectively, to reconstruct the cylinder pressure. In [21], a single-cylinder pressure sensor and a crank angle sensor were used to reconstruct the cylinder pressure for a six-cylinder heavy-duty diesel engine. In addition, approaches like artificial neural networks have also been investigated [15,22,23,24,25].
- (3)
- Combination of vibration and crank speed-based reconstructionIt has been shown that both engine structural vibration and crank angular speed contain information about the cylinder pressure but mainly in different frequency regions [16]. In [16], the cylinder pressure was reconstructed based on complex-valued radial basis function network using both vibration and speed signal. In [26], a recursive engine in-cylinder pressure reconstruction approach by the use of both engine vibration and engine speed was proposed.
- (1)
- Problems regarding spectrum leakage, ill-conditioned inversion, and frequency response function variations do not exist.
- (2)
- It avoids the training of networks such that large amounts of data are not necessary.
- (3)
- It does not depend on the engine energy model. Building the engine energy model can be expensive and time-consuming in practice, especially when the model is used for different types of engines.
- (4)
- It completely eliminates the need for a physical cylinder pressure transducer.
- (1)
- A sensor fusion-based engine speed estimation approach is proposed.
- (2)
- The accuracy of the cylinder pressure reconstruction can be enhanced by tuning the weightings in the sensor fusion of the engine speed.
2. Test Bench
3. Engine Speed Sensing by a Flywheel Angular Position Sensor
4. Engine Speed Sensing by a Vibration Sensor
| Algorithm 1: Vibration sensor-based engine cycle frequency estimation algorithm. |
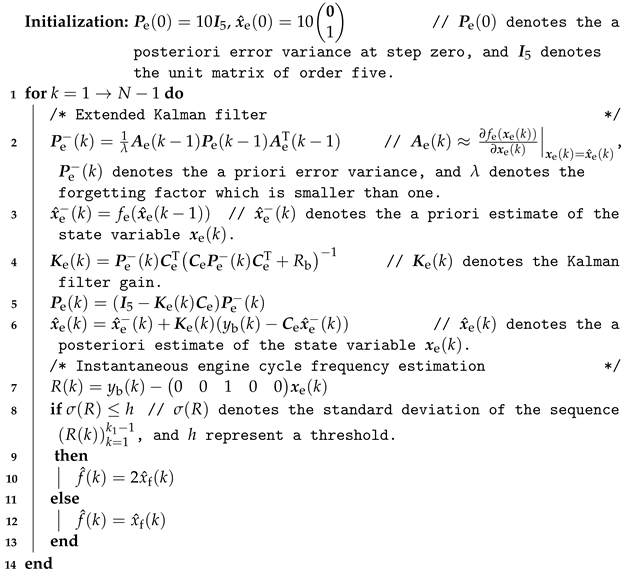 |
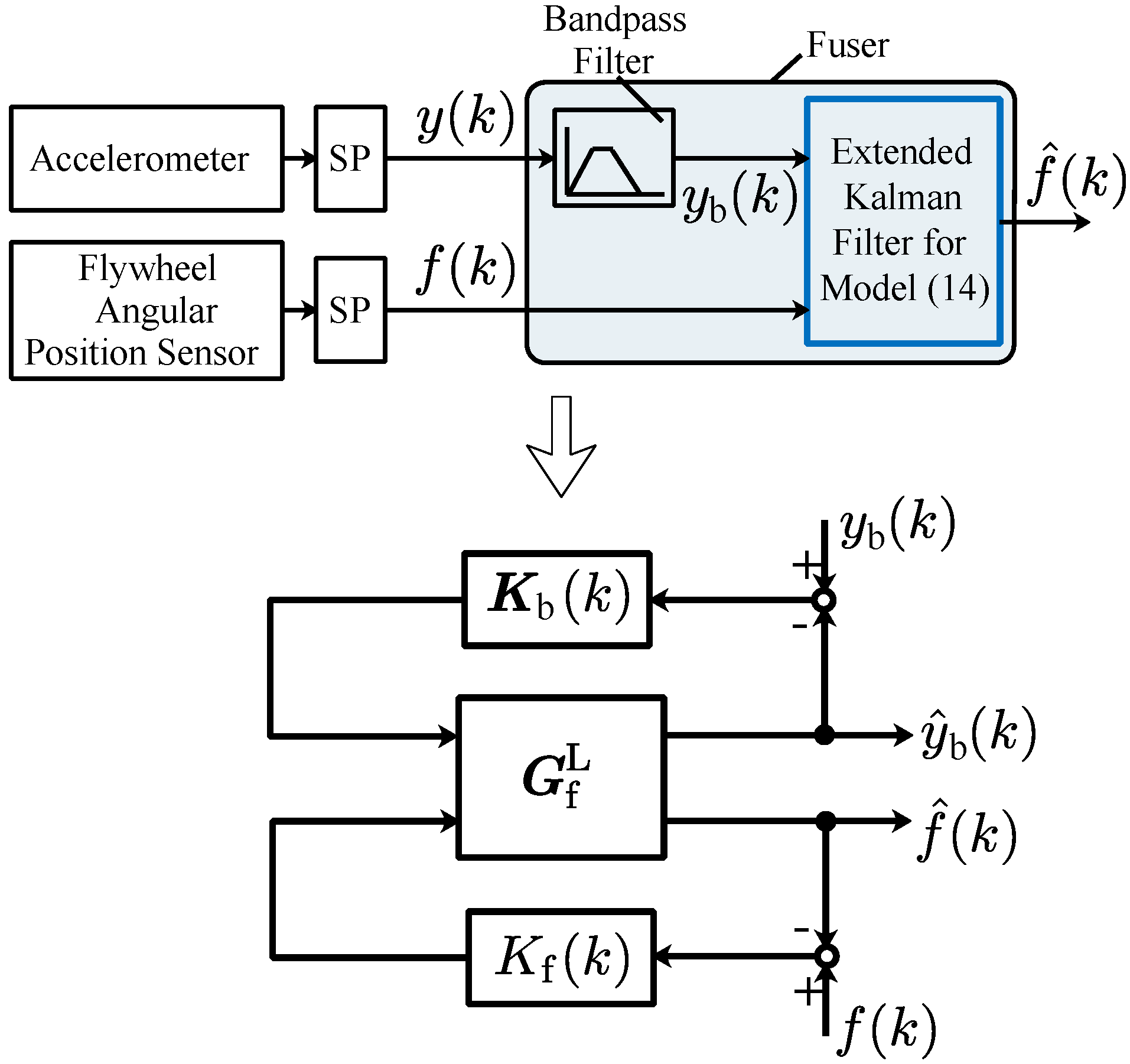
5. Sensor Fusion-Based Engine Speed Estimation
- Step 1:
- Augment the output in the model (14) with the instantaneous engine cycle frequency , then the following nonlinear model can be obtained:where the term represents the output error induced by the difference between and .
- Step 2:
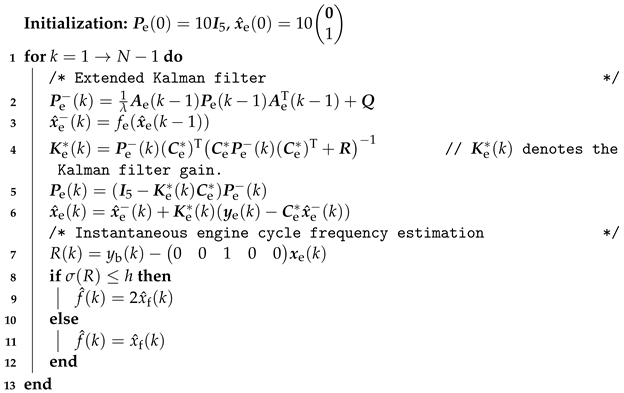
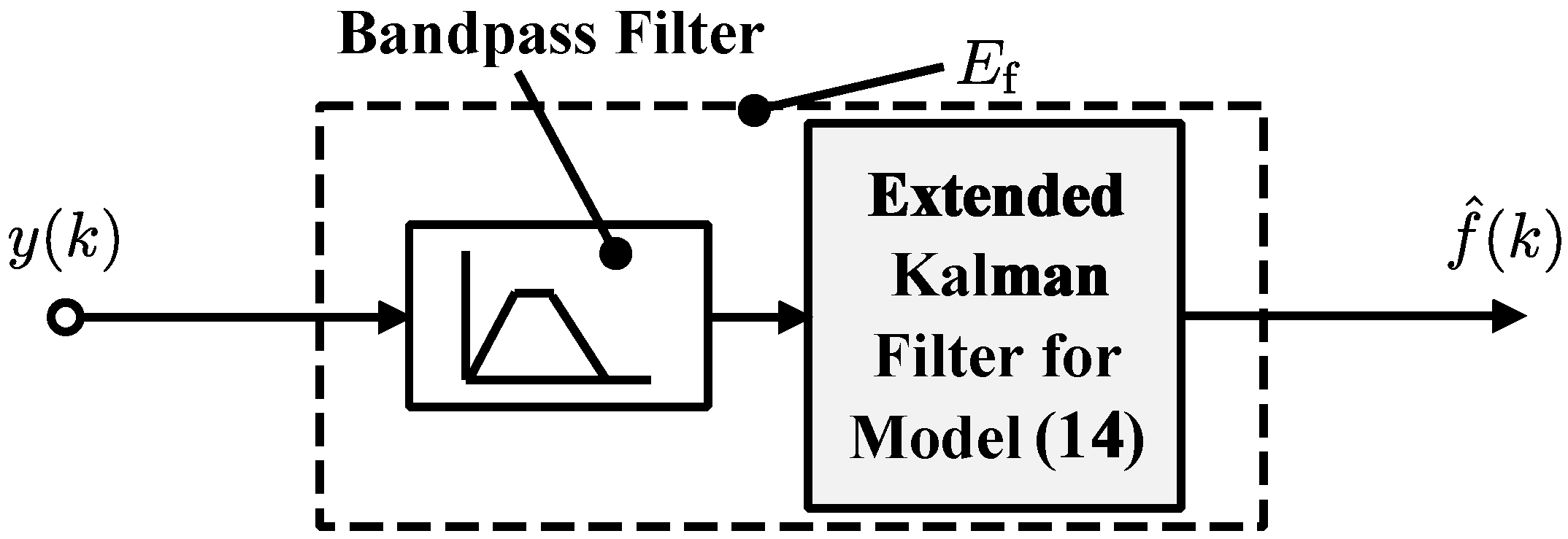
- Obtain the extended Kalman filter for the model (18), such that the instantaneous engine cycle frequency can be estimated. The extended Kalman filter can be seen as the fuser in the sensor fusion approach illustrated in Figure 4. The specific sensor fusion-based instantaneous engine cycle frequency estimation algorithm is summarized in Algorithm 2.In Algorithm 2,andandandand and represent the Kalman filter gains corresponding to and , respectively, andFurthermore, in Algorithm 2, the matrix and the matrix denote the covariance matrix of the white noise and the covariance matrix of the white noise , respectively. and represent the process noise and the measurement noise, respectively, of the following state-space model:where the vector denotes the state vector which has the same dimension as the state vector .The matrix and matrix are set to be a matrix in a diagonal form, i.e.,andwhere Q denotes a real number, denotes the unit matrix of order five, and and correspond to and , respectively. By tuning the values of and , we can indirectly tune the gains and , which is equivalent to tuning the weightings on , , , and [36], e.g., we can tune to make a decision on which sensor (flywheel angular position sensor or vibration sensor) should be more believed. So, we can finally obtain different estimates of the instantaneous engine cycle frequency, with which we can check the cylinder pressure reconstruction results variations.
| Algorithm 2: Sensor fusion-based instantaneous engine cycle frequency estimation. |
 |
6. Sensor-Fused Engine Speed-Based Cylinder Pressure Reconstruction
6.1. Calculated Speed-Based Cylinder Pressure Reconstruction
- (i)
- Use system identification approaches to identify a model between cylinder pressure and vibration. The model is a discrete time, linear, time-invariant model, which has four inputs and one output.
- (ii)
- Use a delay bank containing three delay blocks to make other three cylinder pressure curves be the delayed curves of the cylinder No. 1 pressure curve.
- (iii)
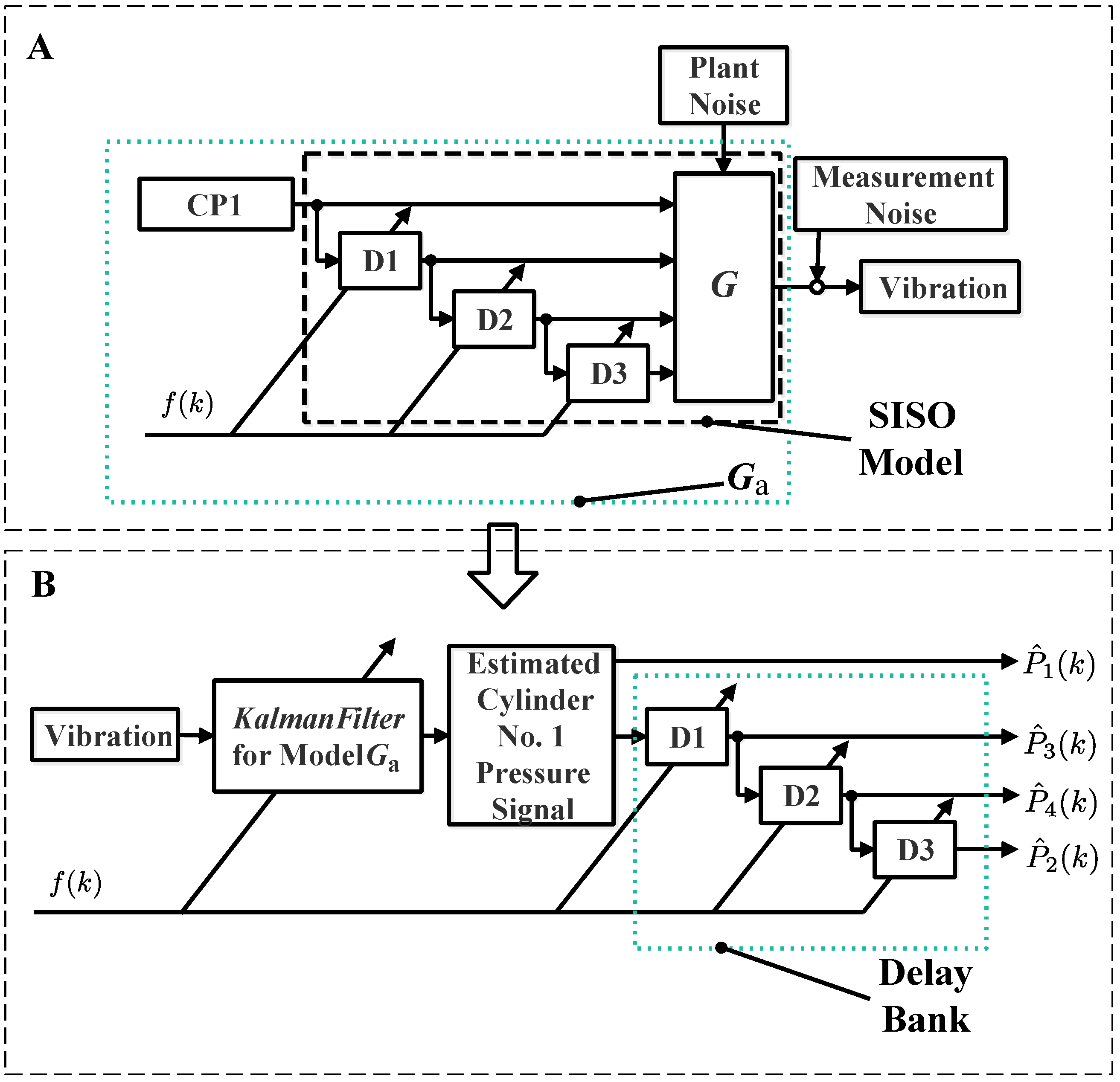
- Obtain the augmented model by connecting three models, i.e., the cylinder pressure signal model, the model , and three delay blocks.
- Step 1:
- Use system identification approaches to identify the model between cylinder pressure and vibration signal, and denote the identified model as . The model has four inputs (i.e., four cylinder pressure signals , ) and one output (i.e., the vibration signal ). The state-space representation of the model is as follows:where denotes the state vector, the matrices , , , and denote the state matrix, the input matrix, the output matrix, and the feedthrough matrix, respectively, the term denotes the output error, and the input is represented as follows:
- Step 2:
- Under stationary engine operating conditions, similar to the modeling of the vibration signal in Equation (5), the cylinder pressure signal can be expressed as the output of the following state-space model:where the vector denotes the state vector, represents the output error, the value of should be guaranteed to be a small value, and the matrix and the matrix denote the state matrix and the output matrix, respectively.
- Step 3:
- As displayed in Figure 5, D1, D2, and D3 denote the symbols of three single-input, single-output delay blocks. The model of the each delay block can be expressed as follows:where the vectors , , and denote the state, input, and output signal of the delay system, respectively. The matrices , , and denote the state matrix, the input matrix, and the output matrix, respectively.We denote the conceptual time-varying transfer operator of each delay block as with q the forward shift operator.
- Step 4:
- As shown in Figure 5, based on the models of three delay blocks, the other cylinder pressure signals can be obtained by knowing the cylinder No. 1 pressure signal; thus, we can obtain a single-input single-output model between the cylinder No. 1 pressure signal and the vibration signal, and the model can be formulated as follows:where denotes the state vector, the term denotes the output error, and the matrices , , , , and the state vector are given as follows:andrespectively.
- Step 5:
- By augmenting the state of the model (29) with the state of the model (31), the augmented model can be obtained as follows:where represents the state vector. The state matrix , the output matrix , and the state vector can be denoted as follows:andrespectively.is assumed to be a scalar white noise process, of which the covariance function is , and the value of is tunable.
- Step 6:
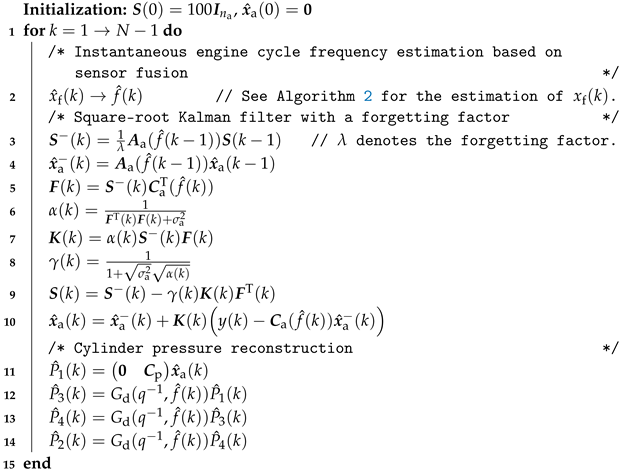
- Based on the augmented model (37), the specific algorithm for reconstructing the cylinder No. 1 pressure signal is briefly displayed as a group of the following recursive equations:where denotes the Kalman filter gain.It should be noted that under non-stationary operating conditions, a forgetting factor should be involved in the above Kalman filter. In addition to the cylinder No. 1 pressure estimate , three other cylinder pressure signals can be simultaneously reconstructed using the model (30) of the delay block.
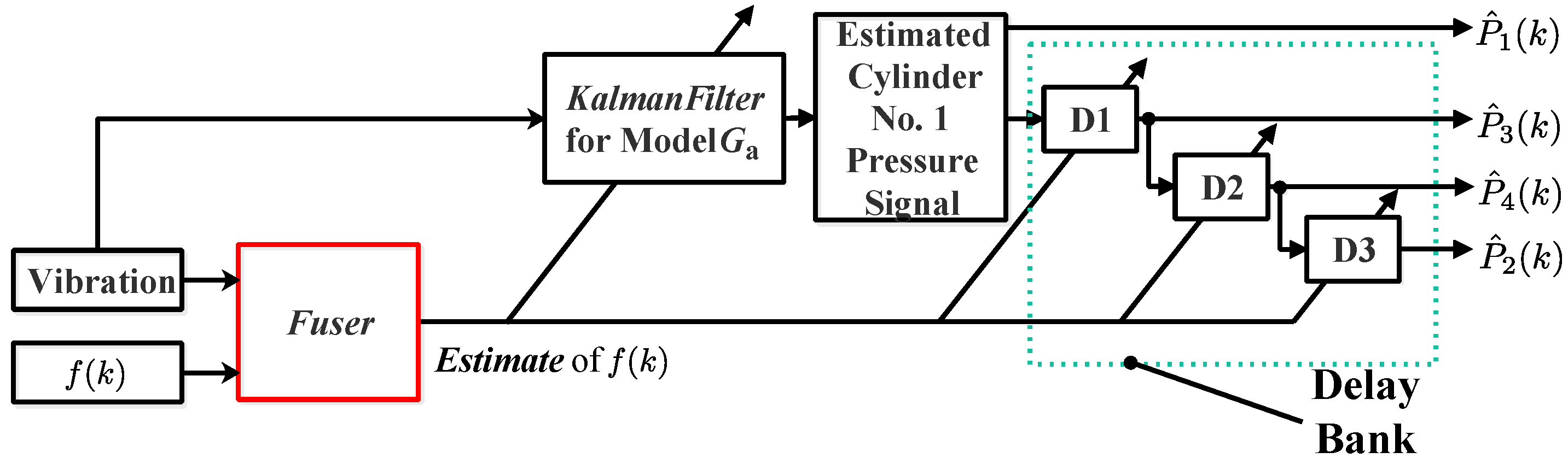
6.2. Sensor Fusion-Based Cylinder Pressure Reconstruction
| Algorithm 3: Sensor-fused engine speed-based cylinder pressure reconstruction. |
 |
7. Experimental Studies
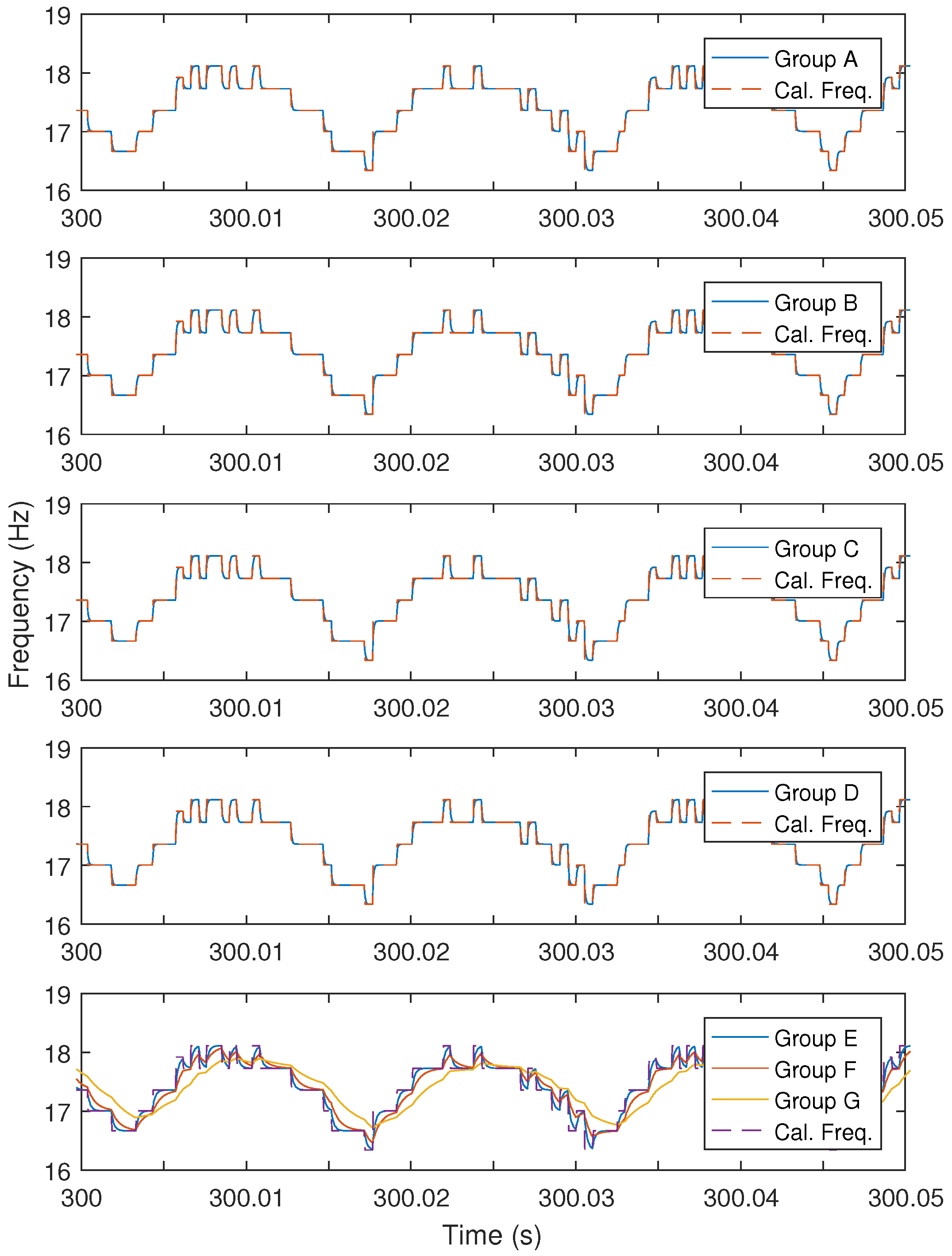
7.1. Sensor Fusion Results
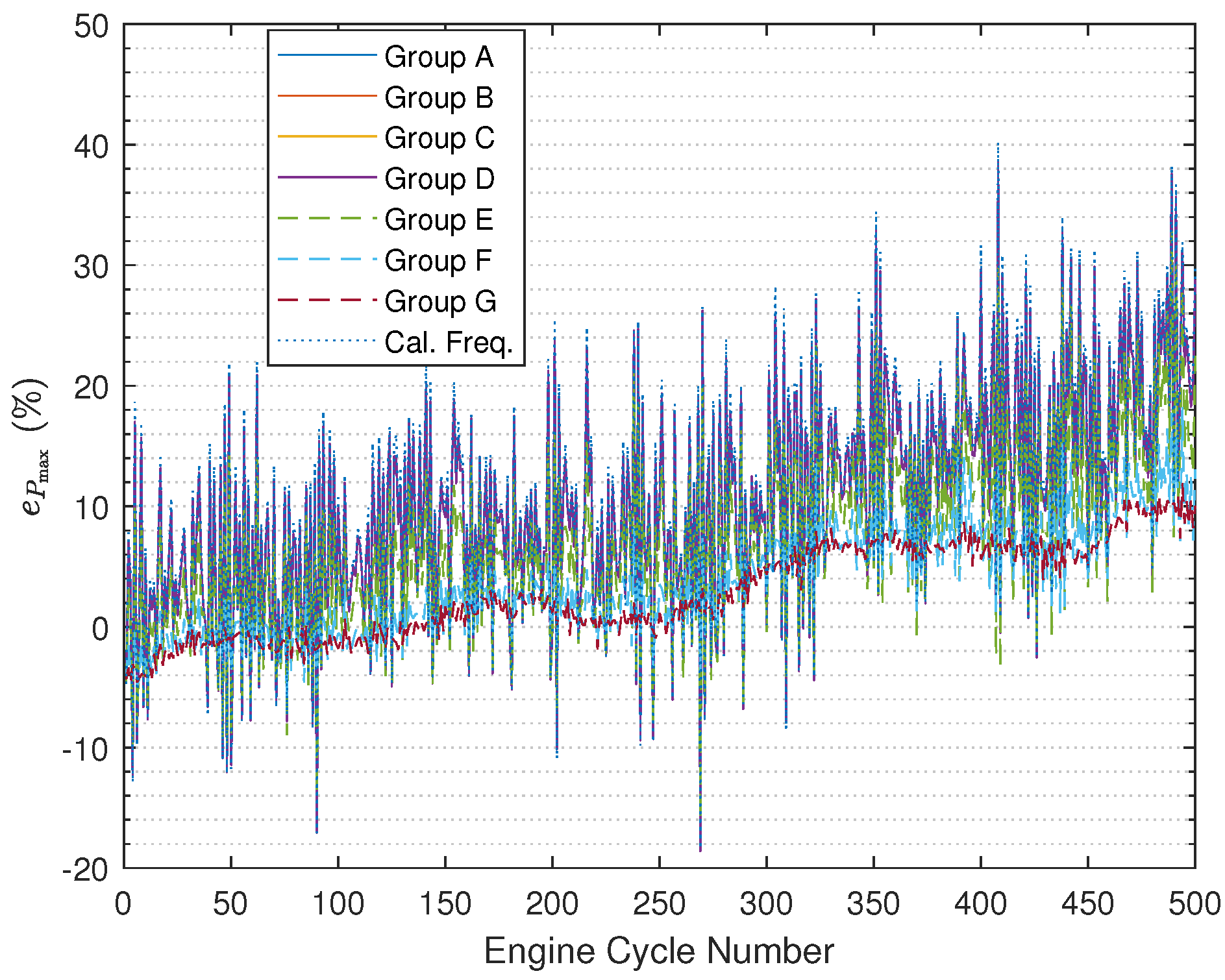
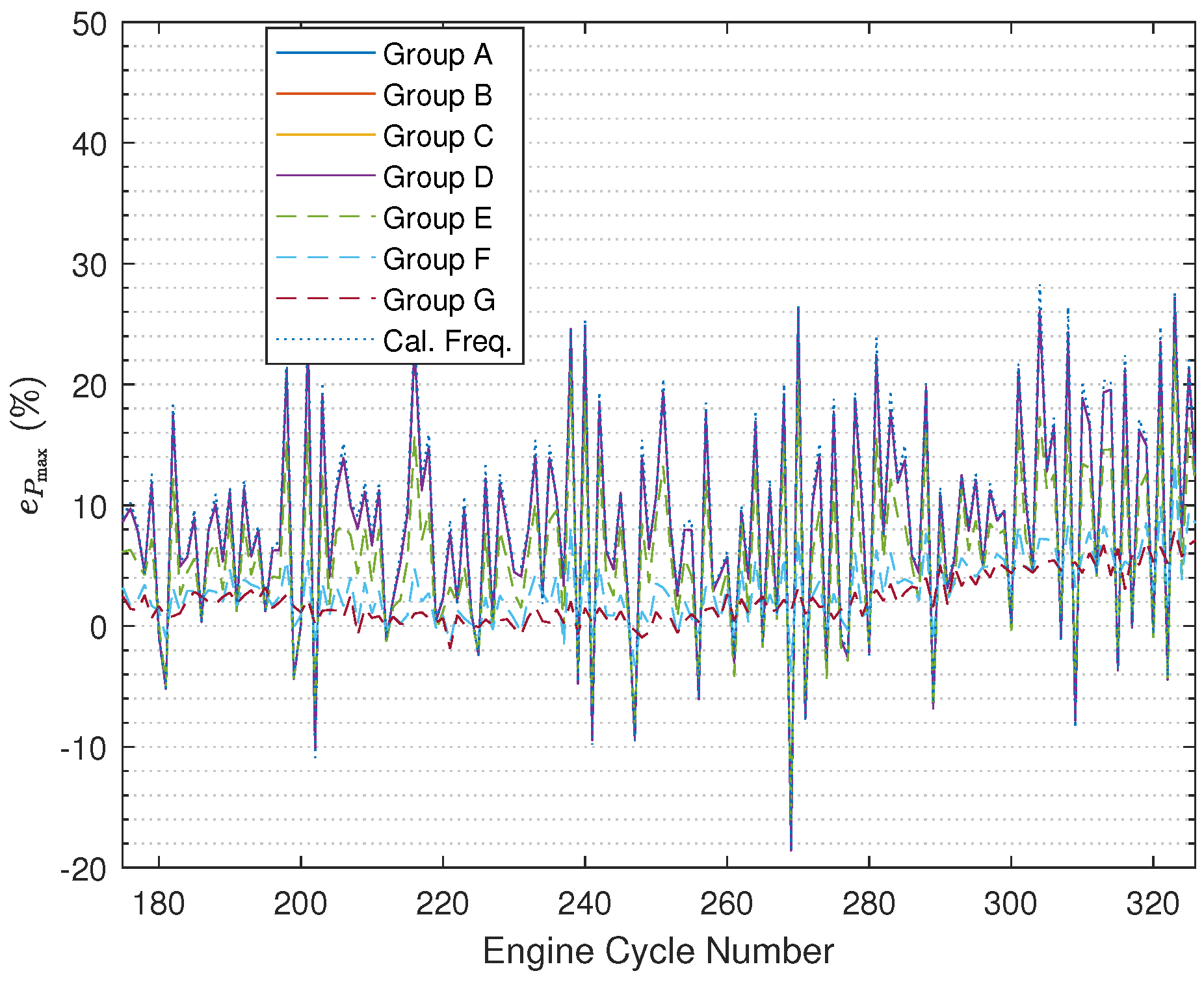
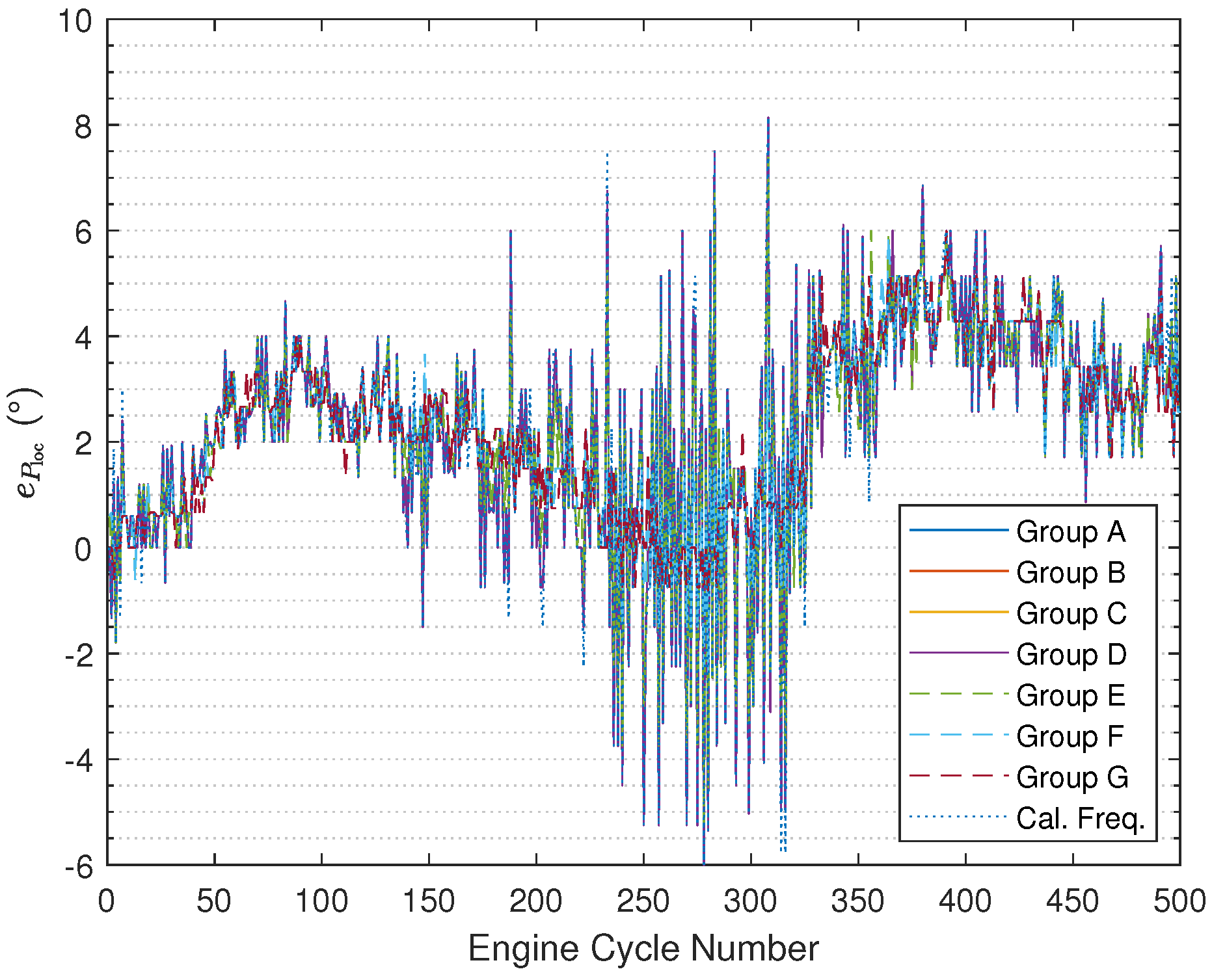
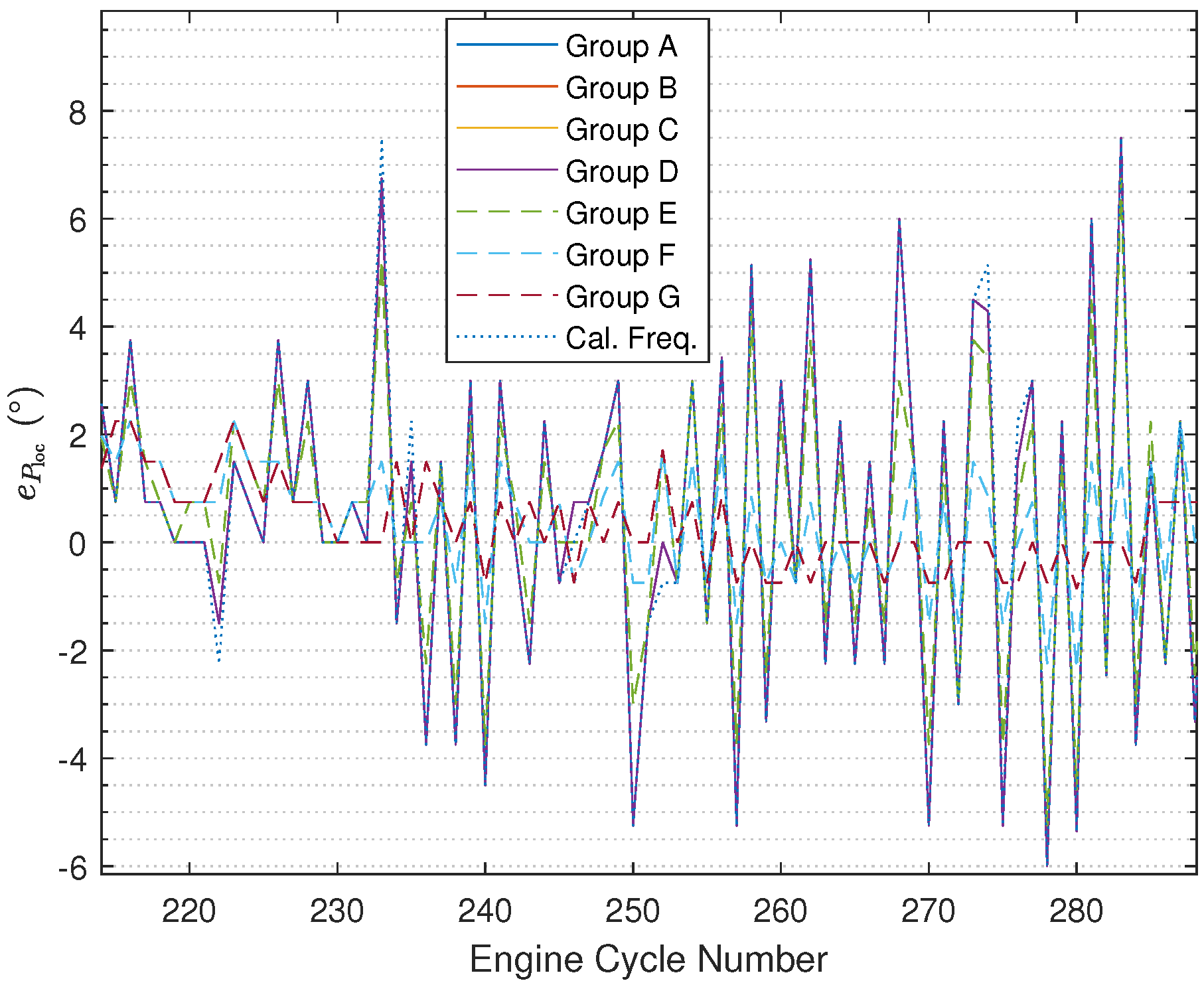
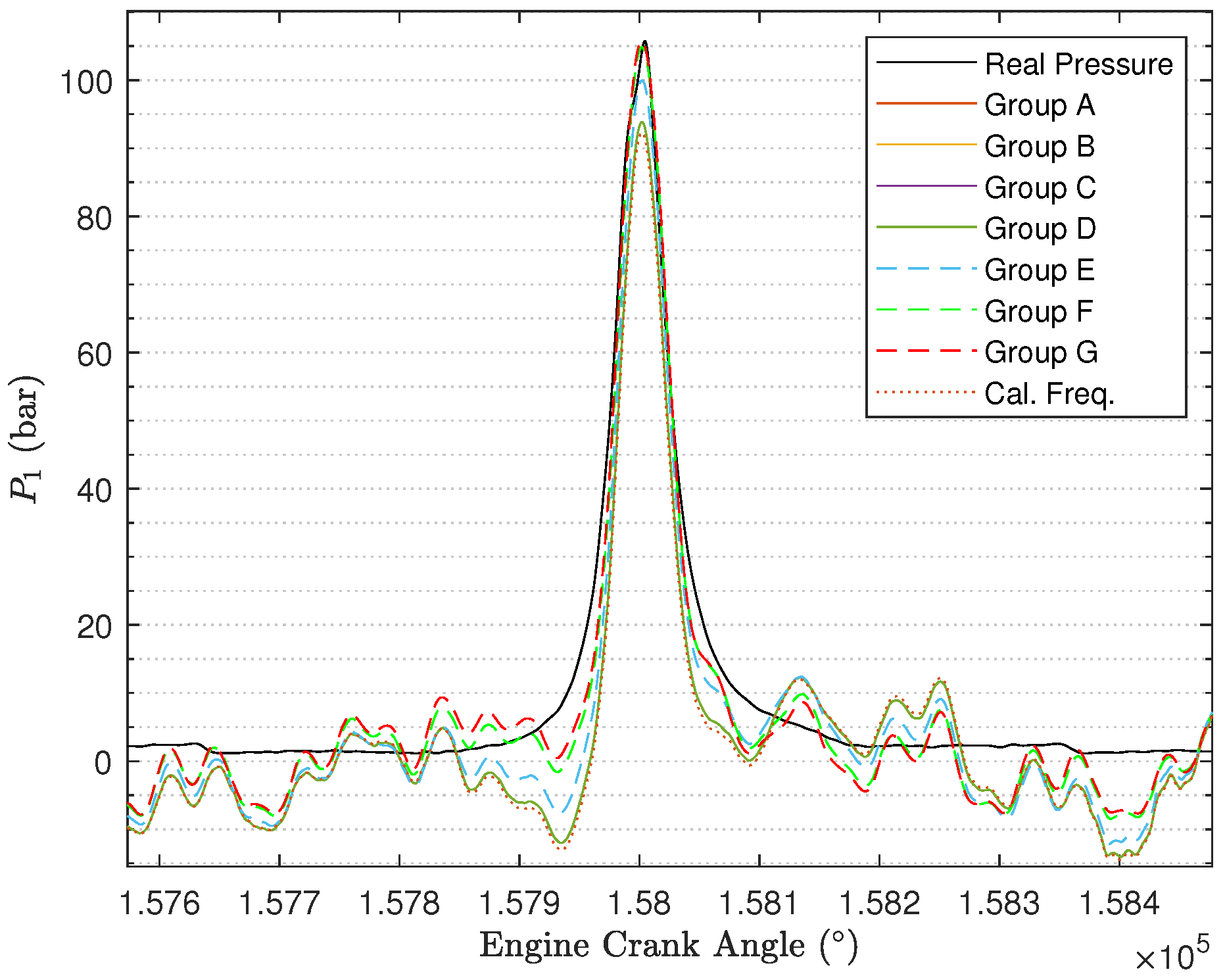
7.2. Cylinder Pressure Reconstruction Results
- (1)
- error:
- (2)
- error:
8. Conclusions and Perspectives
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Heywood, J.B. Internal Combustion Engine Fundamentals; McGraw-Hill Education: New York, NY, USA, 2018. [Google Scholar]
- Jeon, W.; Georgiou, A.; Sun, Z.; Rothamer, D.A.; Kim, K.; Kweon, C.B.; Rajamani, R. Accelerometer based robust estimation of in-cylinder pressure for cycle-to-cycle combustion control. IEEE Trans. Instrum. Meas. 2023, 72, 1–13. [Google Scholar] [CrossRef]
- Pla, B.; De la Morena, J.; Bares, P.; Jimenez, I. In-cylinder pressure smart sampling for efficient data management. Int. J. Engine Res. 2023, 24, 2949–2957. [Google Scholar] [CrossRef]
- Xu, S.; Tian, X.; Wang, C.; Qin, Y.; Lin, X.; Zhu, J.; Sun, X.; Huang, T. A novel coordinated control strategy for parallel hybrid electric vehicles during clutch slipping process. Appl. Sci. 2022, 12, 8317. [Google Scholar] [CrossRef]
- Tian, X.; Cai, Y.; Sun, X.; Zhu, Z. Collaborative optimization of fuel economy and battery life for plug-in hybrid electric buses considering traffic condition. J. Energy Storage 2024, 90, 111928. [Google Scholar] [CrossRef]
- Dunne, J.F. Indirect sensing of cylinder pressure for feedback control of combustion in IC engines. In Proceedings of the 14th IEEE International Conference on Electronic Measurement & Instruments, Changsha, China, 1–3 November 2019; pp. 658–667. [Google Scholar]
- Polonowksi, C.J.; Mathur, V.K.; Naber, J.D.; Blough, J.R. Accelerometer based sensing of combustion in a high speed HPCR diesel engine. In Proceedings of the SAE World Congress & Exhibition, Detorit, MI, USA, 16–19 April 2007. [Google Scholar]
- Arnone, L.; Manelli, S.; Chiatti, G.; Chiavola, O. In-cylinder pressure analysis through accelerometer signal processing for diesel engine combustion optimization. In Proceedings of the SAE 2009 Noise and Vibration Conference and Exhibition, Saint Charles, CA, USA, 19–21 May 2009. [Google Scholar]
- Taglialatela, F.; Cesario, N.; Porto, M.; Merola, S.S.; Sementa, P.; Vaglieco, B.M. Use of accelerometers for spark advance control of SI engines. SAE Int. J. Engine 2009, 2, 971–981. [Google Scholar] [CrossRef]
- Azzoni, P.; Paniero, A. Cylinder pressure reconstruction by cepstrum analysis. In Proceedings of the 22nd International Symposium on Automotive Technology and Automation, Florence, Italy, 14–18 May 1990; pp. 629–637. [Google Scholar]
- Ren, Y. Detection of Knocking Combination in Diesel Engines by Inverse Filtering of Structural Vibration Signals; University of New South Wales: Sydney, Austrilia, 1999. [Google Scholar]
- Gao, Y.; Randall, R.B. Reconstruction of diesel engine cylinder pressure using a time domain smoothing technique. Mech. Syst. Signal Process. 1999, 13, 709–722. [Google Scholar] [CrossRef]
- El-Ghamry, M.; Steel, J.A.; Reuben, R.L.; Fog, T.L. Indirect measurement of cylinder pressure from diesel engines using acoustic emission. Mech. Syst. Signal Process. 2005, 19, 751–765. [Google Scholar] [CrossRef]
- Du, H.; Zhang, L.; Shi, X. Reconstructing cylinder pressure from vibration signals based on radial basis function networks. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 761–767. [Google Scholar] [CrossRef]
- Bennett, C. Reconstruction of Gasoline Engine In-Cylinder Pressures Using Recurrent Neural Networks; University of Sussex: Brighton, UK, 2014. [Google Scholar]
- Johnsson, R. Cylinder pressure reconstruction based on complex radial basis function networks from vibration and speed signals. Mech. Syst. Signal Process. 2006, 20, 1923–1940. [Google Scholar] [CrossRef]
- Connolly, F.T.; Yagle, A.E. Modeling and identification of combustion pressure process in internal combustion engines. Mech. Syst. Signal Process. 1994, 8, 1–19. [Google Scholar] [CrossRef]
- Moro, D.; Cavina, N.; Ponti, F. In-cylinder pressure reconstruction based on instantaneous engine speed signal. J. Eng. Gas Turbines Power 2002, 124, 220–225. [Google Scholar] [CrossRef]
- Shiao, Y.; Moskwa, J.J. Cylinder pressure and combustion heat release estimation for SI engine diagnostics using nonlinear sliding observers. IEEE Trans. Control Syst. Technol. 1995, 3, 70–78. [Google Scholar] [CrossRef]
- Al-Durra, A.; Canova, M.; Yurkovich, S. A model-based methodology for real-time estimation of diesel engine cylinder pressure. J. Dyn. Syst. Meas. Control. 2011, 133, 031005–1–031005–9. [Google Scholar] [CrossRef]
- Kulah, S.; Forrai, A.; Rentmeester, F.; Donkers, T.; Willems, F. Balanced model order reduction method for systems depending on a parameter. Int. J. Engine Res. 2018, 19, 179–188. [Google Scholar] [CrossRef]
- Jacob, P.J.; Gu, F.; Ball, A.D. Non-parametric models in the monitoring of engine performance and condition: Part 1: Modeling of non-linear engine processes. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 1999, 213, 73–81. [Google Scholar] [CrossRef]
- Gu, F.; Jacob, P.J.; Ball, A.D. Non-parametric models in the monitoring of engine performance and condition: Part 2: Non-instrusive estimation of diesel engine cylinder pressure and its use in fault detection. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 1999, 213, 135–143. [Google Scholar] [CrossRef]
- Potenza, R.; Dunne, J.F.; Richardson, D. Multicylinder engine pressure reconstruction using NARX neural networks and crank kinematics. Int. J. Engine Res. 2007, 8, 499–518. [Google Scholar] [CrossRef]
- Ofner, A.B.; Kefalas, A.; Posch, S.; Pirker, G.; Geiger, B.C. In-cylinder pressure reconstruction from engine block vibrations via a branched convolutional neural network. Mech. Syst. Signal Process. 2023, 183, 109640. [Google Scholar] [CrossRef]
- Han, R.; Bohn, C.; Bauer, G. Recursive engine in-cylinder pressure estimation using Kalman filter and structural vibration signal. IFAC-PapersOnLine 2018, 51, 700–705. [Google Scholar] [CrossRef]
- Han, R. Recursive Model-Based Virtual In-Cylinder Pressure Sensing for Internal Combustion Engines; Papierflieger: Clausthal-Zellerfeld, Germany, 2021. [Google Scholar]
- André, H.; Girardin, F.; Bourdon, A.; Antoni, J.; Rémond, R. Precision of the IAS monitoring system based on the elapsed time method in the spectral domain. Mech. Syst. Signal Process. 2014, 44, 14–30. [Google Scholar] [CrossRef]
- Gustafsson, F. Adaptive Filtering and Change Detection; John Wiley & Son: Chichester, UK, 2000. [Google Scholar]
- Han, R.; Bohn, C.; Bauer, G. Comparison between calculated speed-based and sensor-fused speed-based engine in-cylinder pressure estimation method. IFAC-PapersOnLine 2022, 55, 223–228. [Google Scholar] [CrossRef]
- Vold, H.; Herlufsen, H.; Mains, M.; Corwin-Renner, D. Multi axle order tracking with the Vold-Kalman tracking filter. Sound Vib. 1997, 31, 30–35. [Google Scholar]
- Bohn, C.; Cortabarria, A.; Härtel, V.; Kowalczyk, K. Active control of engine-induced vibrations in automotive vehicles using disturbance observer gain scheduling. Control Eng. Pract. 2004, 12, 1029–1039. [Google Scholar] [CrossRef]
- Prabhu, K.M.M. Window Functions and Their Applications in Signal Processing; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Gelb, A. (Ed.) Applied Optimal Estimation; The MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice Using MATLAB; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Academic Press: New York, NY, USA, 1970. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, R.; Bohn, C.; Bauer, G. Recursive Engine In-Cylinder Pressure Reconstruction Using Sensor-Fused Engine Speed. Sensors 2024, 24, 5237. https://doi.org/10.3390/s24165237
Han R, Bohn C, Bauer G. Recursive Engine In-Cylinder Pressure Reconstruction Using Sensor-Fused Engine Speed. Sensors. 2024; 24(16):5237. https://doi.org/10.3390/s24165237
Chicago/Turabian StyleHan, Runzhe, Christian Bohn, and Georg Bauer. 2024. "Recursive Engine In-Cylinder Pressure Reconstruction Using Sensor-Fused Engine Speed" Sensors 24, no. 16: 5237. https://doi.org/10.3390/s24165237