


An Integrated Navigation Method Aided by Position Correction Model and Velocity Model for AUVs

Abstract
1. Introduction
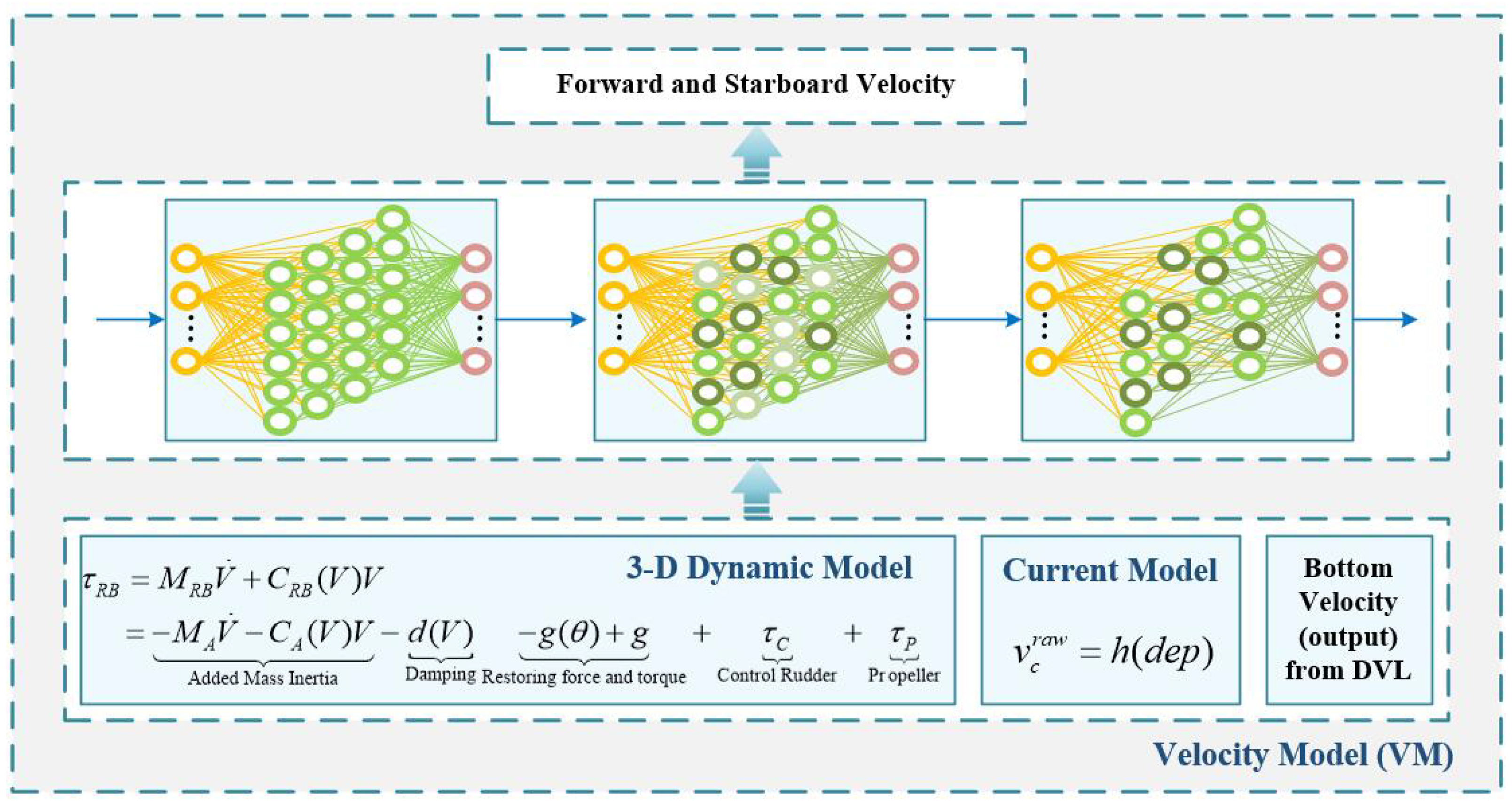
- Since DVL velocities are updated at a frequency of 1 Hz, and the update rate of the AUV navigation system is 10 Hz, this paper constructs a velocity model based on the constructed 3-degrees-of-freedom (3-DOF) dynamics model using the optimal pruning extreme machine learning method. When the DVL velocity is valid, its velocity is used for velocity model training and navigation computation; otherwise, the output of the velocity model is used to replace the DVL velocity for navigation calculations.
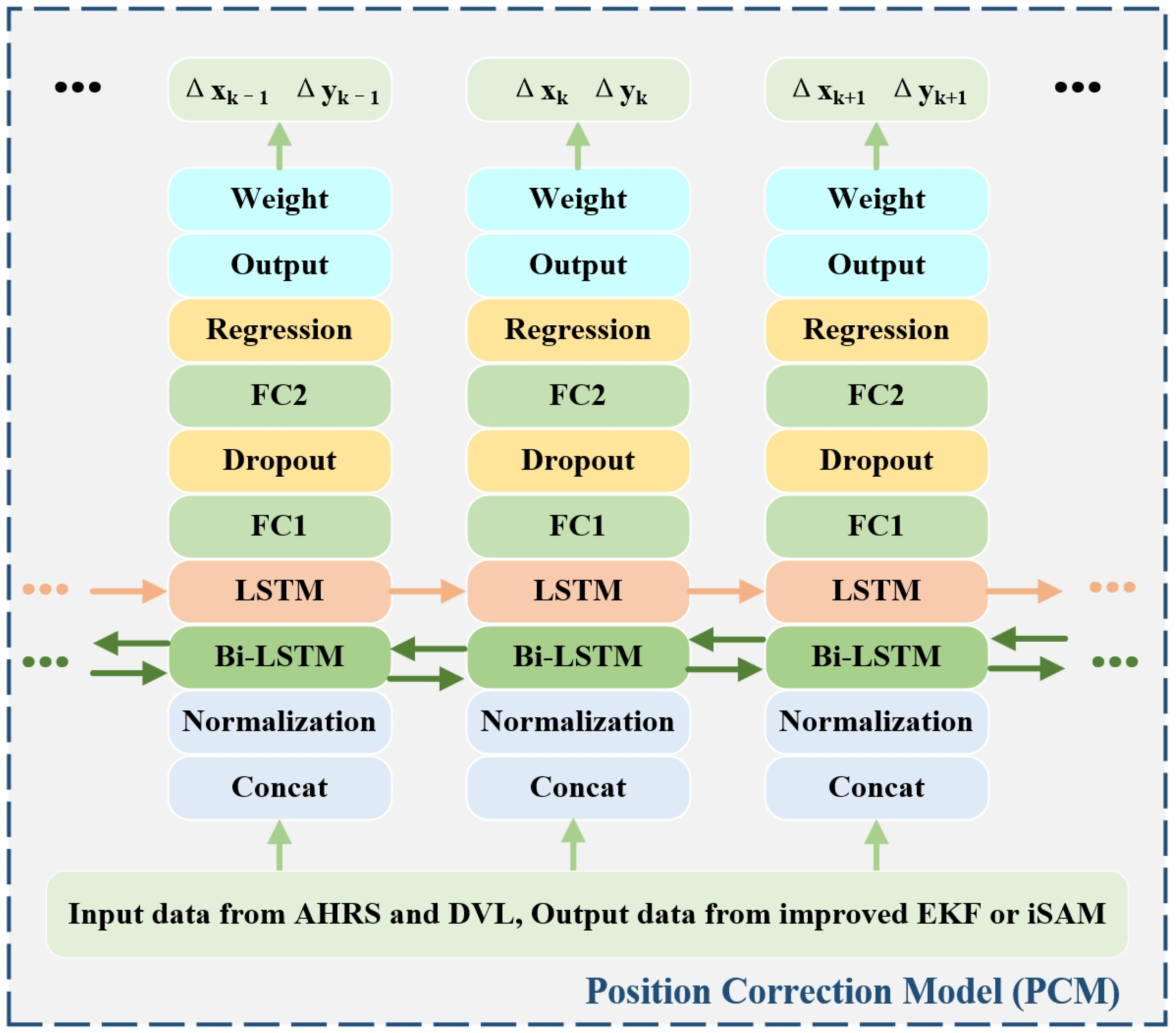
- Since the AUV cannot obtain GPS longitude and latitude information for position assistance when navigating underwater, this paper constructs a position correction model based on a hybrid gated recurrent neural network to learn the correction of the navigation system when the AUV has position assistance. The EKF-PCM and iSAM-PCM models are constructed by GPS position correction of the EKF and iSAM methods, respectively. The output of the position correction model is used for auxiliary positioning during underwater navigation.
- An extended Kalman filter, assisted by the velocity model and the position correction model, is constructed. The velocity model output is used for navigation during the DVL update interval. The GPS position is added to the observation vector for position assistance when there is an update to the GPS data. Otherwise, the displacement output by the position correction model is added to the observation vector for position assistance.
2. Materials and Methods
2.1. AUV Onboard Sensors of Navigation Systemlabel
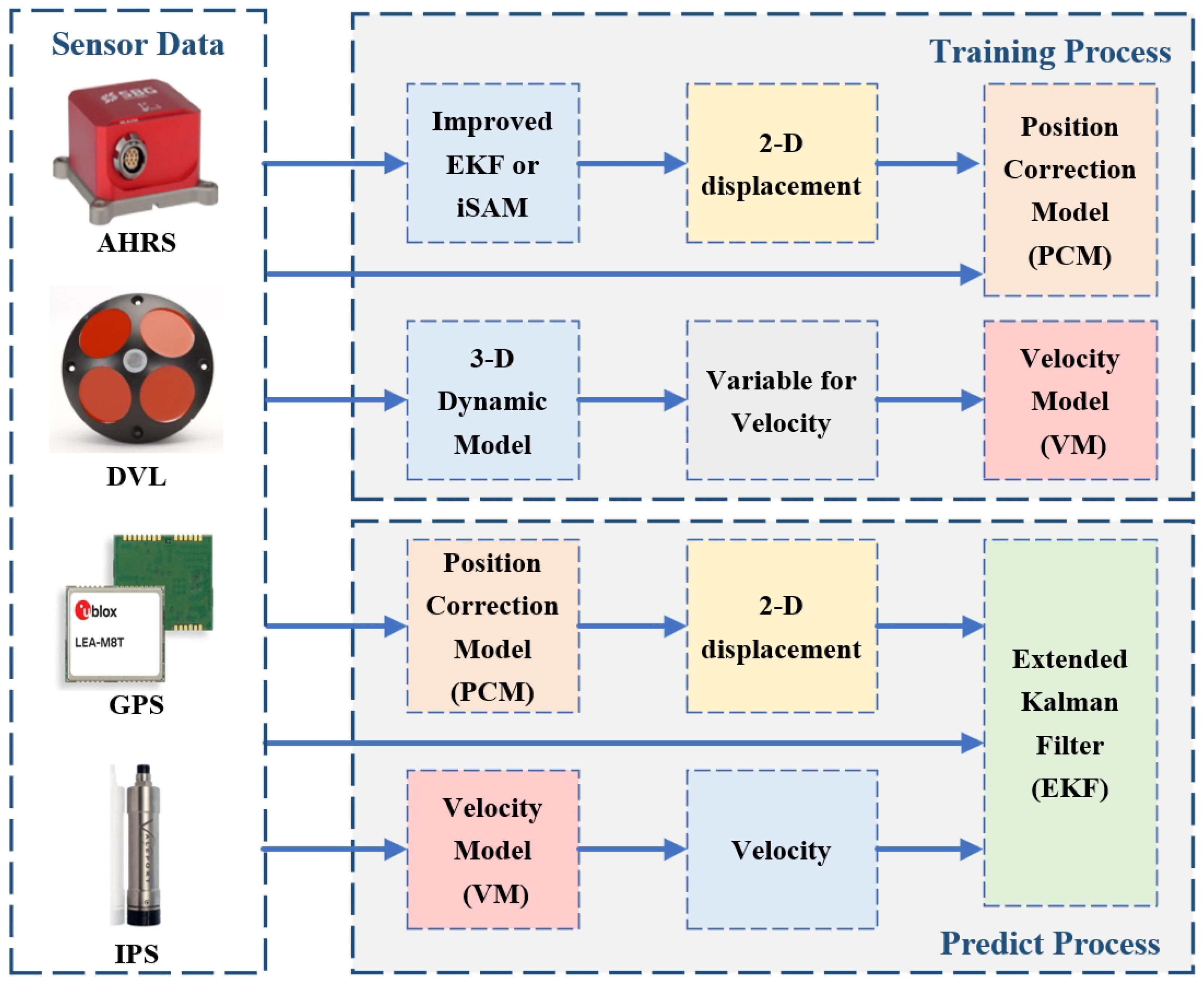
- The AHRS, specifically the Ellipse-A AHRS, is produced by the French company SBG Systems, which provides the navigation system with heading, roll, pitch, three-axis acceleration, and three-axis angular velocity. The three-dimensional attitude angle is the key data that the navigation system can use to position the AUV.
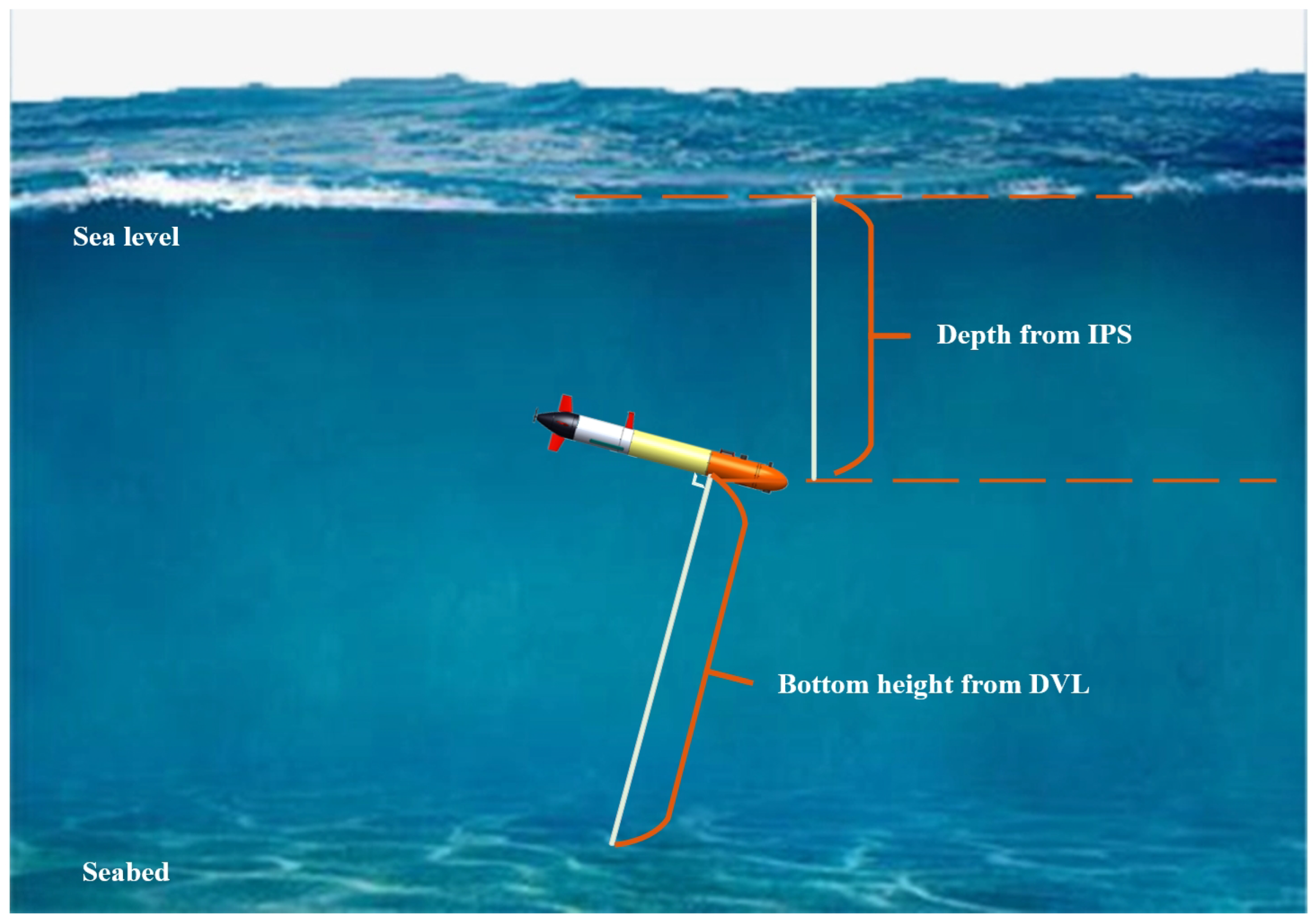
- The DVL, specifically the NavQuest 600 micro DVL, comes from LinkQuest in the United States, which provides three-dimensional bottoming velocity and bottom height for navigation systems. The velocity data can be detected when the bottom height is 0.3–100 m. When the range is exceeded, the DVL sensor is unavailable.
- The GPS comes from the Swiss company U-Blox, whose specific model is the LEA-M8T GPS. When the field is sufficiently open and there are enough satellites, the GPS can provide latitude and longitude information without cumulative error. It needs to be converted to UTM coordinates to be used for AUVs. Due to the rapid attenuation of radio signals as they travel, the AUV cannot obtain position data from the GPS when it travels underwater, but the AUV can use GPS data to correct positioning errors when it sails on the surface.
- The specific model of the IPS is miniIPS, which comes from Valeport in the UK and provides the navigation system with the current depth of the AUV.
2.2. Proposed Method for AUV Navigation
2.2.1. Architecture of Proposed Method
- The 3-D dynamics model is constructed based on the torpedo shape and the cross rudder structure of the AUV. The corresponding input variables are selected, and the output variables are provided by the updated DVL velocity.
- When there is an update of the DVL velocity and the bottoming depth is within the range, the values of the input variables confirmed by the dynamic model at the current moment and the values of the DVL bottoming velocity constitute a set of data, which is trained online by the OP-ELM.
- In order to ensure the training accuracy of the velocity model, multiple groups can be trained at the same time to form the required velocity model by weighted average.
- Due to the update frequency of GPS being lower than that of the navigation system and the position drift occurring easily when the GPS antenna is covered, it is necessary to build a data set in advance.
- The input of the data set is provided by the sensors presented in Section 2.1. The data from the GPS position on the surface is combined with EKF or iSAM to perform a position solution. Then, we can obtain two-dimensional displacement data with uniform position correction.
- The sensor data and the processed two-dimensional displacement data are input into the HGRNN model for offline training to form a position correction model.
- Based on the update frequency of the navigation system, when the sensor data are updated, they are input into the EKF for the navigation calculation.
- When the DVL velocity is updated and the current bottom depth is within the range, the DVL velocity is used for navigation calculations. Otherwise, the output of the latest velocity model is used for the navigation calculation.
- When the GPS data are updated and the current depth of the AUV is within the threshold range, the GPS position is used for assisted navigation. When the AUV is sailing underwater, if the position correction model has velocity output, the assisted navigation is carried out based on the position of the PCM.
2.2.2. Velocity Model
- m: the mass of the AUV in liquid.
- : the rigid body moment of inertia generated around the z-axis.
- n, w: the propeller rotation rate and the wake fraction number.
- W, B: the weight and the buoyancy of the AUV in the same liquid.
- , : the attitude of roll and pitch.
- , : the deflection angles of the top and bottom rudders.
- , : the deflection angles of port and starboard elevators.
- u, v, r: the x-forward velocity, y-starboard velocity, and z-downward angular velocity.
- , , : the x-forward acceleration, y-starboard acceleration, and z-downward angular acceleration.
- X, Y, N: the axial force, lateral force, and yawing external moment on the AUV.
- , , : hydrodynamic coefficients.
2.2.3. Position Correction Model
2.2.4. Proposed Algorithm VM-PCM-EKF
| Algorithm 1: The proposed algorithm VM-PCM-EKF. |
 |
3. Experimental Results
3.1. The Results of Velocity Model
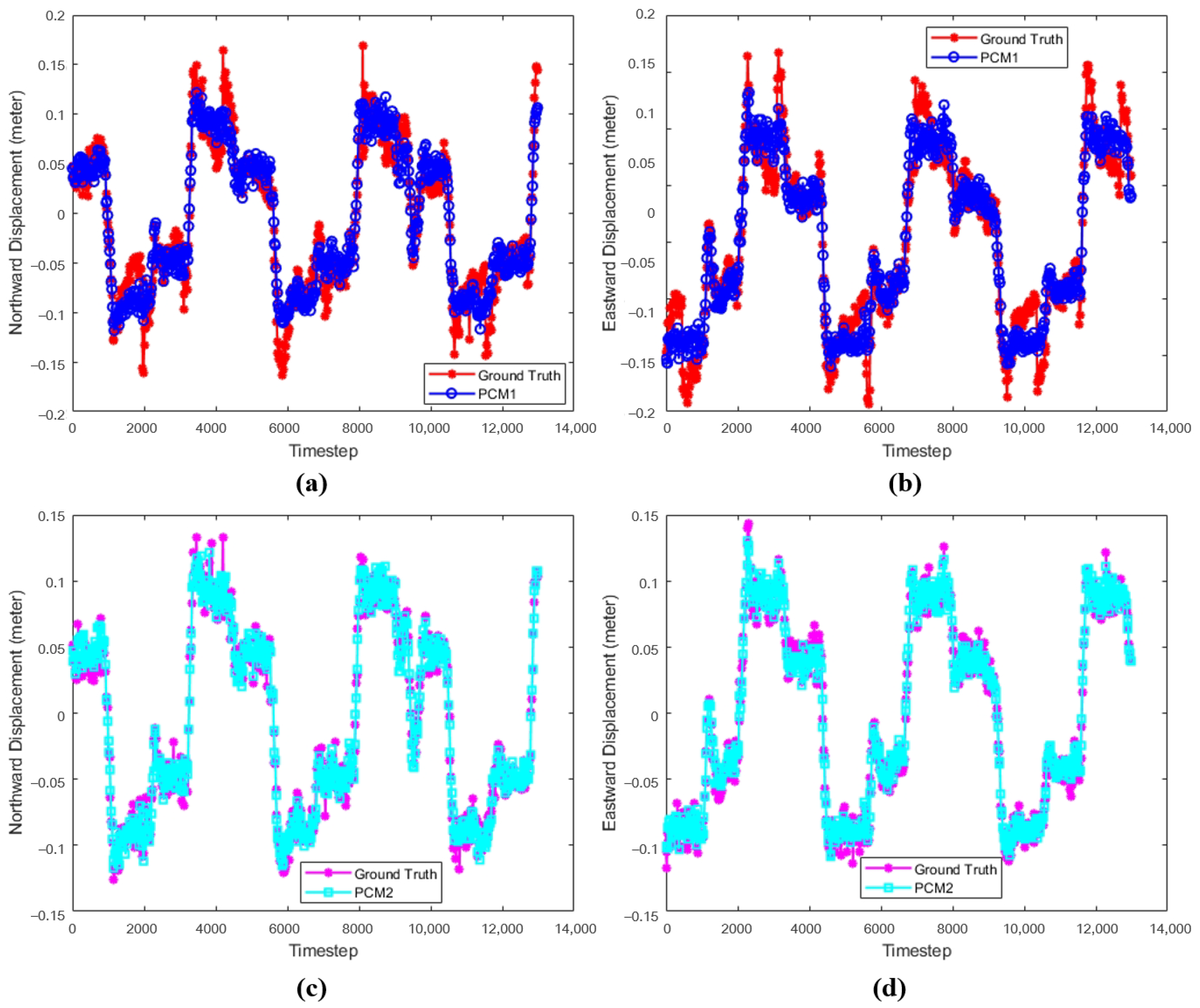
3.2. The Results of Position Correction Model
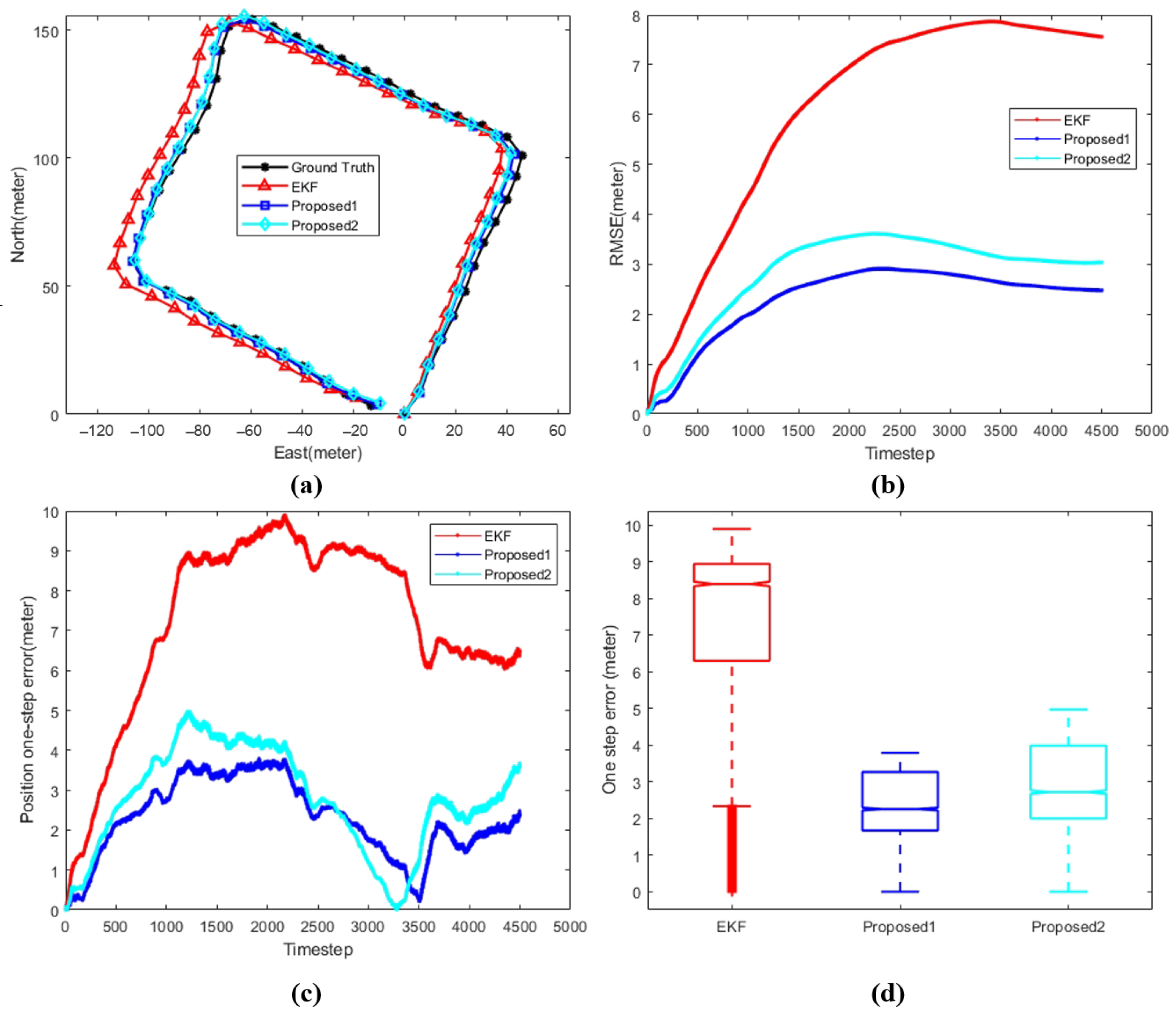
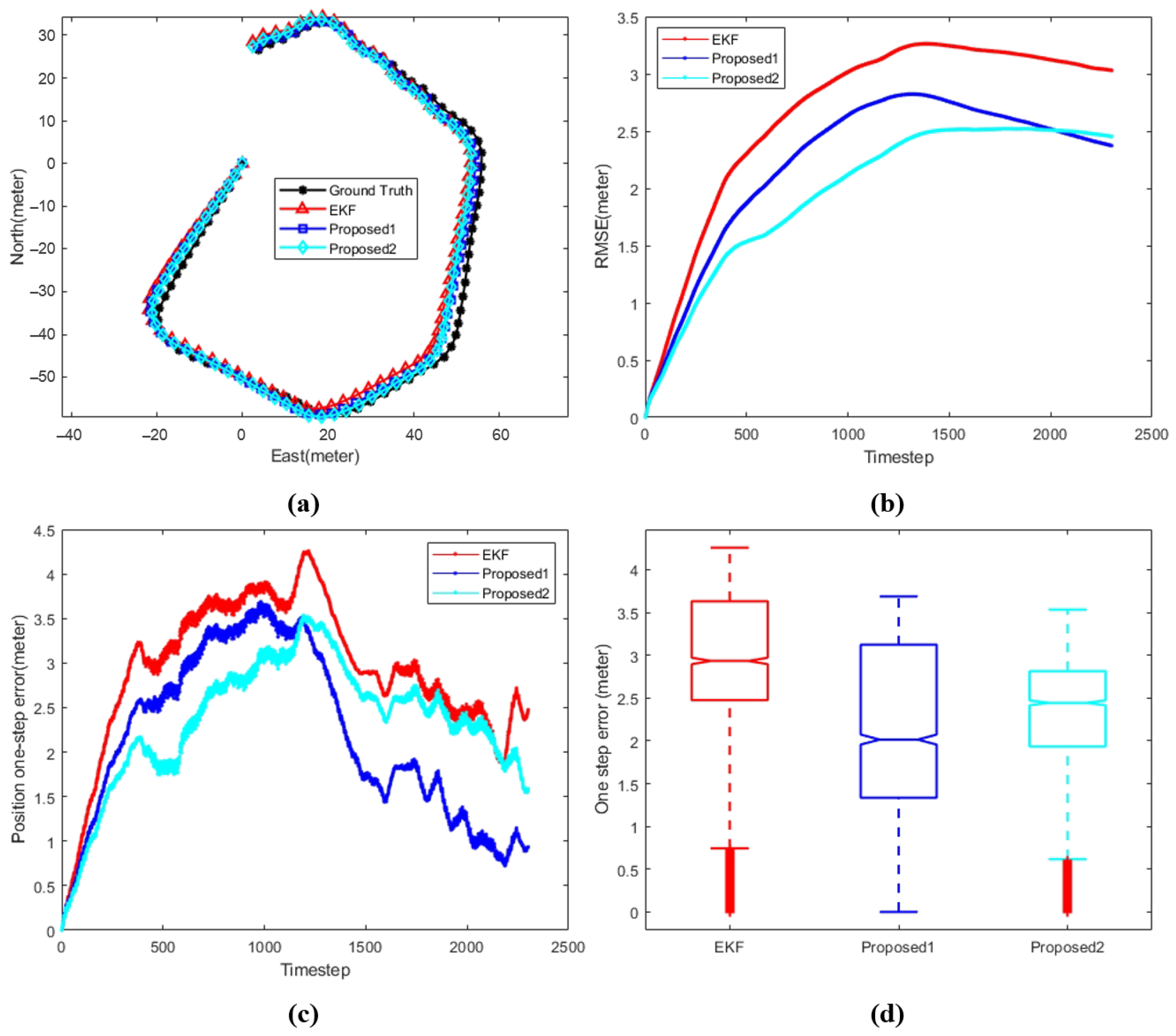
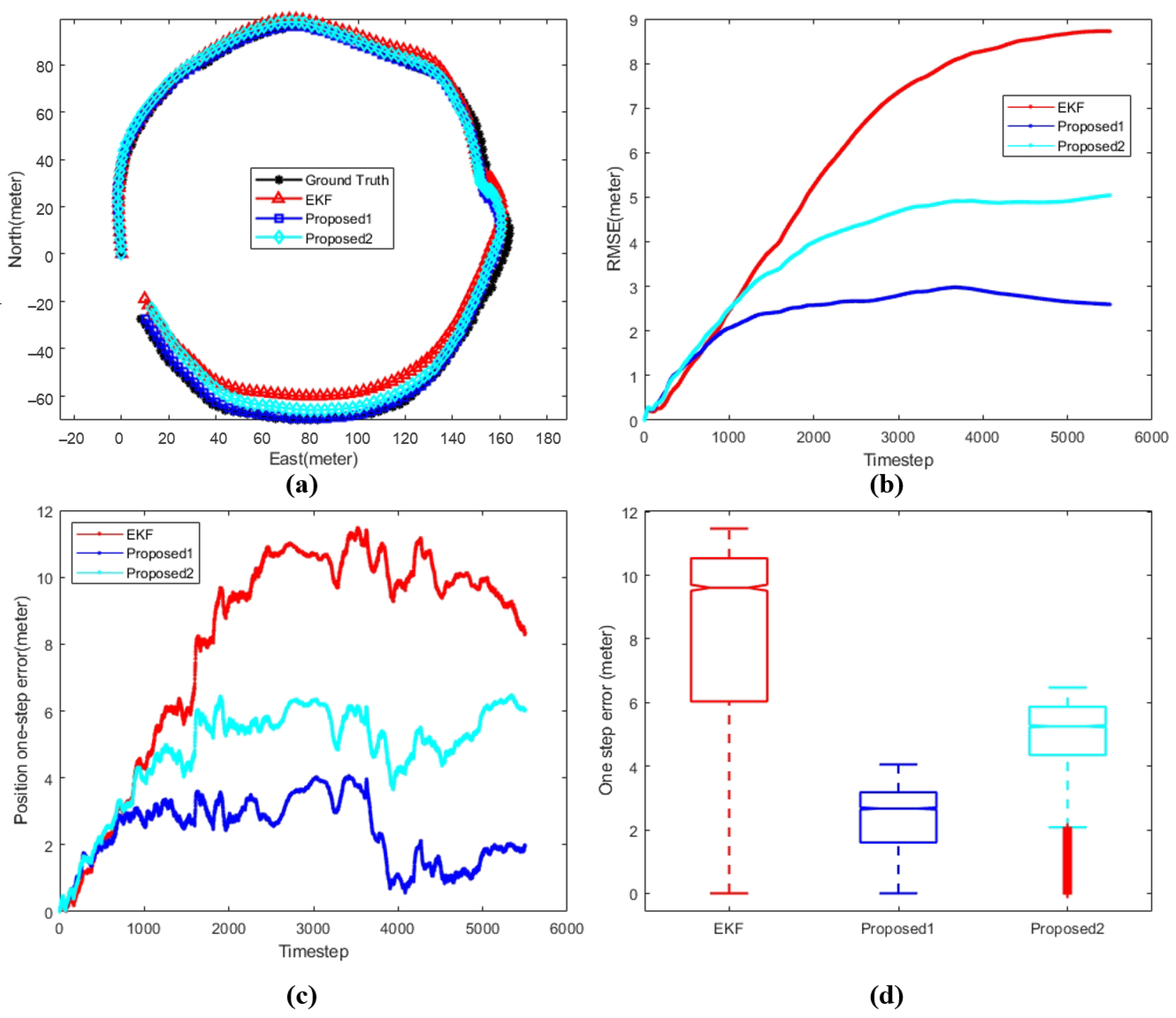
3.3. The Results of Proposed Method VM-PCM-EKF
4. Experimental Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Leonard, J.J.; Bahr, A. Autonomous Underwater Vehicle Navigation. In Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 341–358. [Google Scholar]
- Stutters, L.; Liu, H.; Tiltman, C.; Brown, D.J. Navigation technologies for autonomous underwater vehicles. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 581–589. [Google Scholar] [CrossRef]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Jiang, J.; Chen, M.; Fan, J.A. Deep neural networks for the evaluation and design of photonic devices. Nat. Rev. Mater. 2021, 6, 679–700. [Google Scholar] [CrossRef]
- Razzak, M.I.; Imran, M.; Xu, G. Efficient brain tumor segmentation with multiscale two-pathway-group conventional neural networks. IEEE J. Biomed. Health Inform. 2018, 23, 1911–1919. [Google Scholar] [CrossRef]
- Orvieto, A.; Smith, S.L.; Gu, A.; Fernando, A.; Gulcehre, C.; Pascanu, R.; De, S. Resurrecting recurrent neural networks for long sequences. In Proceedings of the International Conference on Machine Learning, Honolulu, HI, USA, 23–29 July 2023; pp. 26670–26698. [Google Scholar]
- Sarker, I.H. Machine learning: Algorithms, real-world applications and research directions. SN Comput. Sci. 2021, 2, 160. [Google Scholar] [CrossRef]
- Dong, S.; Wang, P.; Abbas, K. A survey on deep learning and its applications. Comput. Sci. Rev. 2021, 40, 100379. [Google Scholar] [CrossRef]
- Xu, Z.; Haroutunian, M.; Murphy, A.J.; Neasham, J.; Norman, R. An underwater visual navigation method based on multiple ArUco markers. J. Mar. Sci. Eng. 2021, 9, 1432. [Google Scholar] [CrossRef]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Yu, Z. IMU-based automated vehicle body sideslip angle and attitude estimation aided by GNSS using parallel adaptive Kalman filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Xu, X.; Gui, J.; Sun, Y.; Yao, Y.; Zhang, T. A robust in-motion alignment method with inertial sensors and Doppler velocity log. IEEE Trans. Instrum. Meas. 2020, 70, 1–13. [Google Scholar] [CrossRef]
- Chung, J.; Sargent, L.; Brown, R.; Gendron, T.; Wheeler, D. GPS tracking technologies to measure mobility-related behaviors in community-dwelling older adults: A systematic review. J. Appl. Gerontol. 2021, 40, 547–557. [Google Scholar] [CrossRef]
- Song, S.; Liu, J.; Guo, J.; Wang, J.; Xie, Y.; Cui, J.H. Neural-Network-Based AUV Navigation for Fast-Changing Environments. IEEE Internet Things J. 2020, 7, 9773–9783. [Google Scholar] [CrossRef]
- Karmozdi, A.; Hashemi, M.; Salarieh, H.; Alasty, A. INS-DVL Navigation Improvement Using Rotational Motion Dynamic Model of AUV. IEEE Sens. J. 2020, 20, 14329–14336. [Google Scholar] [CrossRef]
- Cohen, N.; Yampolsky, Z.; Klein, I. Set-transformer BeamsNet for AUV velocity forecasting in complete DVL outage scenarios. In Proceedings of the 2023 IEEE Underwater Technology (UT), Tokyo, Japan, 6–9 March 2023; pp. 1–6. [Google Scholar]
- Cohen, N.; Klein, I. BeamsNet: A data-driven approach enhancing Doppler velocity log measurements for autonomous underwater vehicle navigation. Eng. Appl. Artif. Intell. 2022, 114, 105216. [Google Scholar] [CrossRef]
- Lv, P.; Guo, J.; Song, Y.; Sha, Q.; Jiang, J.; Mu, X.; Yan, T.; He, B. Autonomous navigation based on iSAM and GPS filter for AUV. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, Republic of Korea, 21–24 February 2017; pp. 1–4. [Google Scholar]
- Lv, P.F.; He, B.; Guo, J.; Shen, Y.; Yan, T.H.; Sha, Q.X. Underwater navigation methodology based on intelligent velocity model for standard AUV. Ocean Eng. 2020, 202, 107073–107085. [Google Scholar] [CrossRef]
- Kinsey, J.C.; Eustice, R.M.; Whitcomb, L.L. A survey of underwater vehicle navigation: Recent advances and new challenges. In Proceedings of the IFAC Conference of Manoeuvering and Control of Marine Craft, Lisbon, Portugal, 20–22 September 2006; Volume 88, pp. 1–12. [Google Scholar]
- Einicke, G.A.; White, L.B. Robust extended Kalman filtering. IEEE Trans. Signal Process. 1999, 47, 2596–2599. [Google Scholar] [CrossRef]
- Djuric, P.M.; Kotecha, J.H.; Zhang, J.; Huang, Y.; Ghirmai, T.; Bugallo, M.F.; Miguez, J. Particle filtering. IEEE Signal Process. Mag. 2003, 20, 19–38. [Google Scholar] [CrossRef]
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. g2o: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2013, 39, 131–149. [Google Scholar] [CrossRef]
- Maurelli, F.; Krupiński, S.; Xiang, X.; Petillot, Y. AUV localisation: A review of passive and active techniques. Int. J. Intell. Robot. Appl. 2022, 6, 246–269. [Google Scholar] [CrossRef]
- Su, X.; Ullah, I.; Liu, X.; Choi, D. A review of underwater localization techniques, algorithms, and challenges. J. Sens. 2020, 2020, 6403161. [Google Scholar] [CrossRef]
- Thacker, N.; Lacey, A. Tutorial: The Kalman Filter; Imaging Science and Biomedical Engineering Division, Medical School, University of Manchester: Manchester, UK, 1998; Volume 61. [Google Scholar]
- Tasnim, M.; Ratul, R.H. Optoacoustic signal-based underwater node localization technique: Overcoming gps limitations without auv requirements. In Proceedings of the 2023 IEEE Symposium on Wireless Technology & Applications (ISWTA), Kuala Lumpur, Malaysia, 15–16 August 2023; pp. 7–11. [Google Scholar]
- Guo, J.; Li, D.; He, B. Intelligent collaborative navigation and control for AUV tracking. IEEE Trans. Ind. Inform. 2020, 17, 1732–1741. [Google Scholar] [CrossRef]
- Mu, X.; He, B.; Zhang, X.; Song, Y.; Shen, Y.; Feng, C. End-to-end navigation for autonomous underwater vehicle with hybrid recurrent neural networks. Ocean Eng. 2019, 194, 106602–106610. [Google Scholar] [CrossRef]
- Sherstinsky, A. Fundamentals of recurrent neural network (RNN) and long short-term memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Lv, P.F.; He, B.; Guo, J. Position correction model based on gated hybrid RNN for AUV navigation. IEEE Trans. Veh. Technol. 2021, 70, 5648–5657. [Google Scholar] [CrossRef]
- Miche, Y.; Sorjamaa, A.; Bas, P.; Simula, O.; Jutten, C.; Lendasse, A. OP-ELM: Optimally pruned extreme learning machine. IEEE Trans. Neural Netw. 2009, 21, 158–162. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Type | Parameter | Value |
|---|---|---|---|
 | Heading | 1° RMS | |
| Ellipse-A AHRS | Pitch | 0.2° RMS | |
| SBG Systems | Roll | 0.2° RMS | |
| Update Rate | 10 Hz (up to 200 Hz) | ||
 | Velocity Accuracy 1 m/s | ||
| NavQuest 600 micro DVL | Altitude Range | 0.3–110 m | |
| LinkQuest | Maximum Velocity | 20 knot | |
| Update Rate | 1 Hz | ||
 | Position Accuracy | 2.5 m CEP | |
| LEA-M8T GPS | Acquisition | GPS & BeiDou | |
| U-blox | Update Rate | 1 Hz | |
| Cold Starts | 25 s | ||
 | miniIPS | Accuracy | 0.01% Range |
| Valeport | Update Rate | 1 Hz |
| Type | Error-Mea (m/s) | Error-Std (m/s) | RMSE (m/s) |
|---|---|---|---|
| Forward Velocity | 0.011 | 0.0132 | 0.2699 |
| Stardboard Velocity | 0.0035 | 0.0041 | 0.0643 |
| Algorithm | Northward Displacement (m) | Eastward Displacement (m) | ||||
|---|---|---|---|---|---|---|
| Error-Mea | Error-Std | RMSE | Error-Mea | Error-Std | RMSE | |
| PCM1 | 0.006 | 0.0054 | 0.008 | 0.0055 | 0.0048 | 0.0073 |
| PCM2 | 0.0058 | 0.0047 | 0.0075 | 0.0053 | 0.0042 | 0.0068 |
| Data | Distance (m) | Algorithm | RMSE (m) | Error (m) | Error-Med (m) | Accuracy |
|---|---|---|---|---|---|---|
| Data 1 | 453 | EKF | 7.56 | 6.49 | 8.39 | 0.014327 |
| Proposed 1 | 2.48 | 2.38 | 2.26 | 0.005254 | ||
| Proposed 2 | 3.04 | 3.59 | 2.72 | 0.007925 | ||
| Data 2 | 236 | EKF | 3.03 | 2.47 | 2.93 | 0.010466 |
| Proposed 1 | 2.37 | 0.93 | 2.01 | 0.003941 | ||
| Proposed 2 | 2.45 | 1.59 | 2.44 | 0.006737 | ||
| Data 3 | 498 | EKF | 8.72 | 8.34 | 9.61 | 0.016747 |
| Proposed 1 | 2.6 | 1.96 | 2.67 | 0.003936 | ||
| Proposed 2 | 5.04 | 6.03 | 5.25 | 0.012108 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, P.; Lv, J.; Hong, Z.; Xu, L. An Integrated Navigation Method Aided by Position Correction Model and Velocity Model for AUVs. Sensors 2024, 24, 5396. https://doi.org/10.3390/s24165396
Lv P, Lv J, Hong Z, Xu L. An Integrated Navigation Method Aided by Position Correction Model and Velocity Model for AUVs. Sensors. 2024; 24(16):5396. https://doi.org/10.3390/s24165396
Chicago/Turabian StyleLv, Pengfei, Junyi Lv, Zhichao Hong, and Lixin Xu. 2024. "An Integrated Navigation Method Aided by Position Correction Model and Velocity Model for AUVs" Sensors 24, no. 16: 5396. https://doi.org/10.3390/s24165396
APA StyleLv, P., Lv, J., Hong, Z., & Xu, L. (2024). An Integrated Navigation Method Aided by Position Correction Model and Velocity Model for AUVs. Sensors, 24(16), 5396. https://doi.org/10.3390/s24165396