

Study of Global Navigation Satellite System Receivers’ Accuracy for Unmanned Vehicles



Abstract
:1. Introduction
- Reception of satellite signals from a single GNSS system.
- Reception of satellite signals from multiple GNSS systems.
- Analysis of DOP parameters of L1 and L1/L5 GNSS receivers.
- Analysis of DOP parameters of each GNSS receiver with active patch and passive helical antennas.
- Comparison of DOP parameters for GNSS receivers from one manufacturer, but from a different production generation, to evaluate the number of tracking satellites during the time.
2. Materials and Methods
2.1. System Design
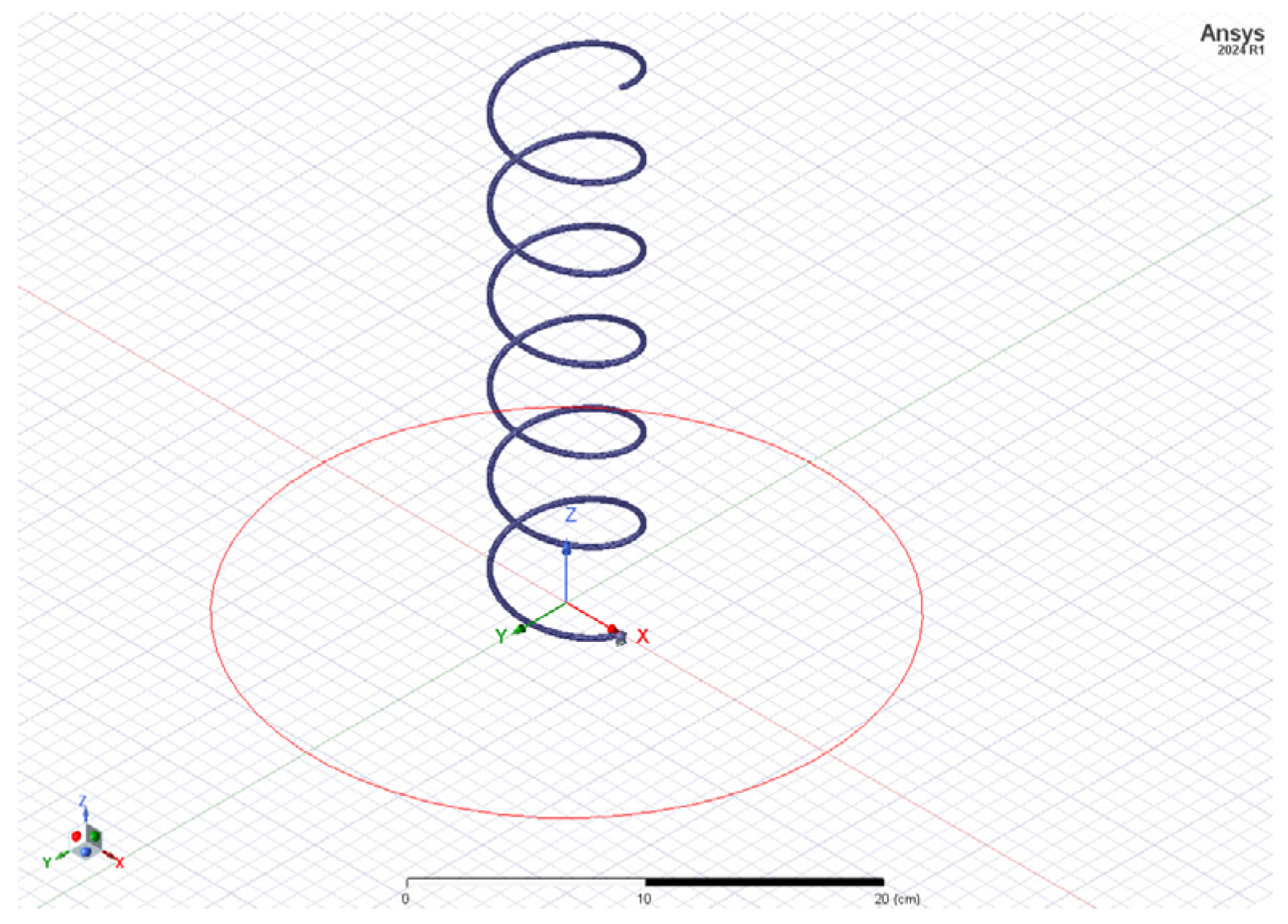
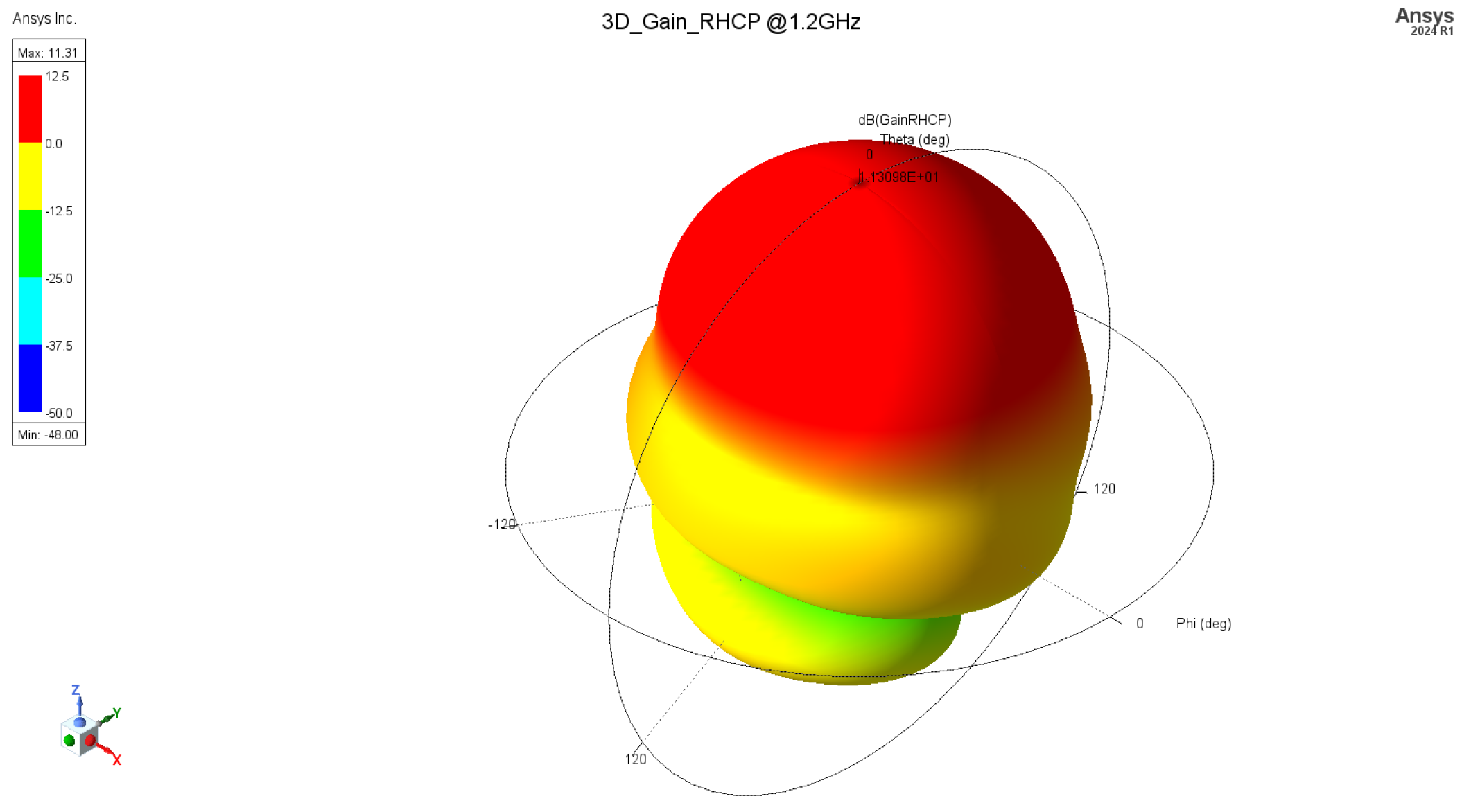
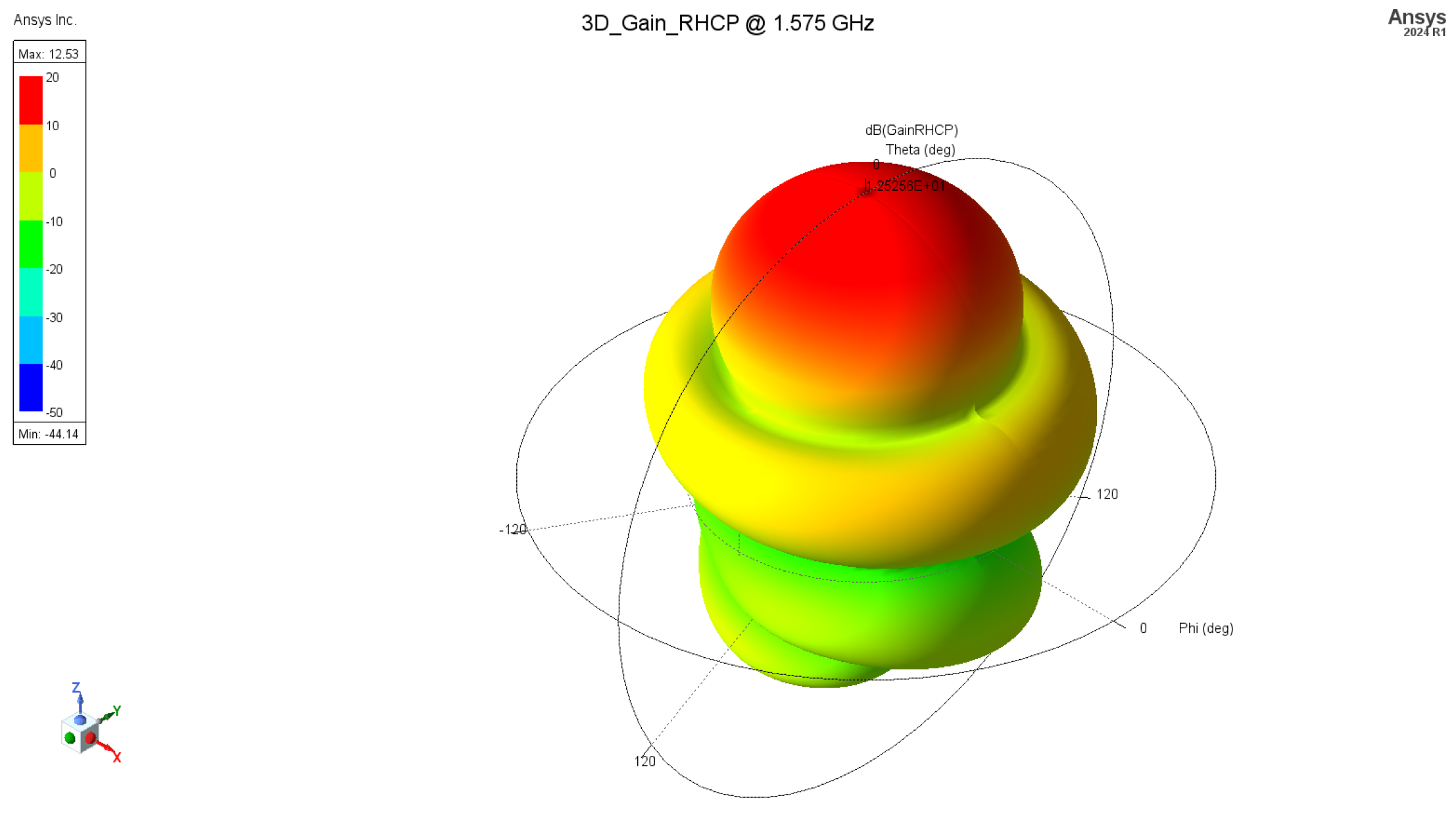
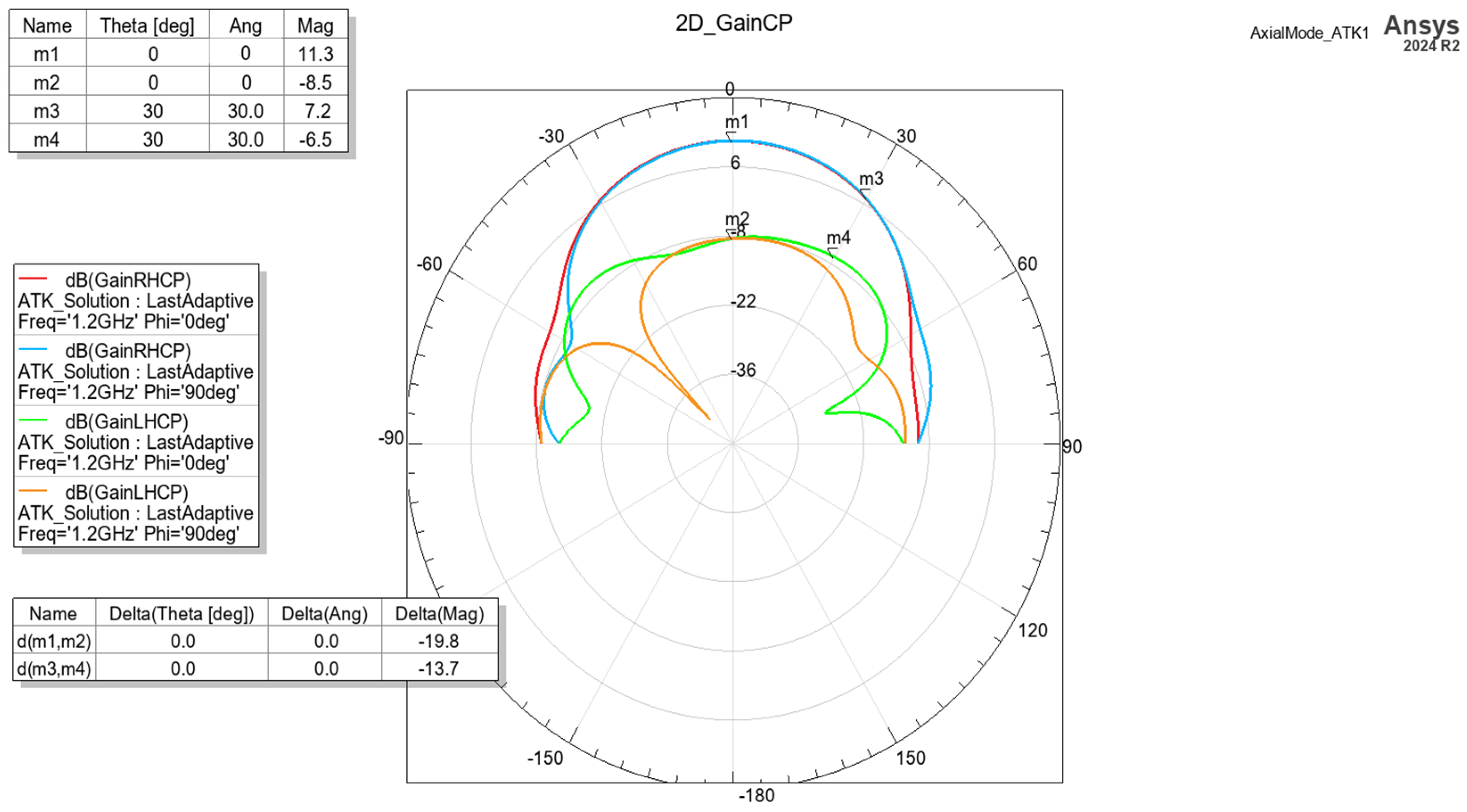
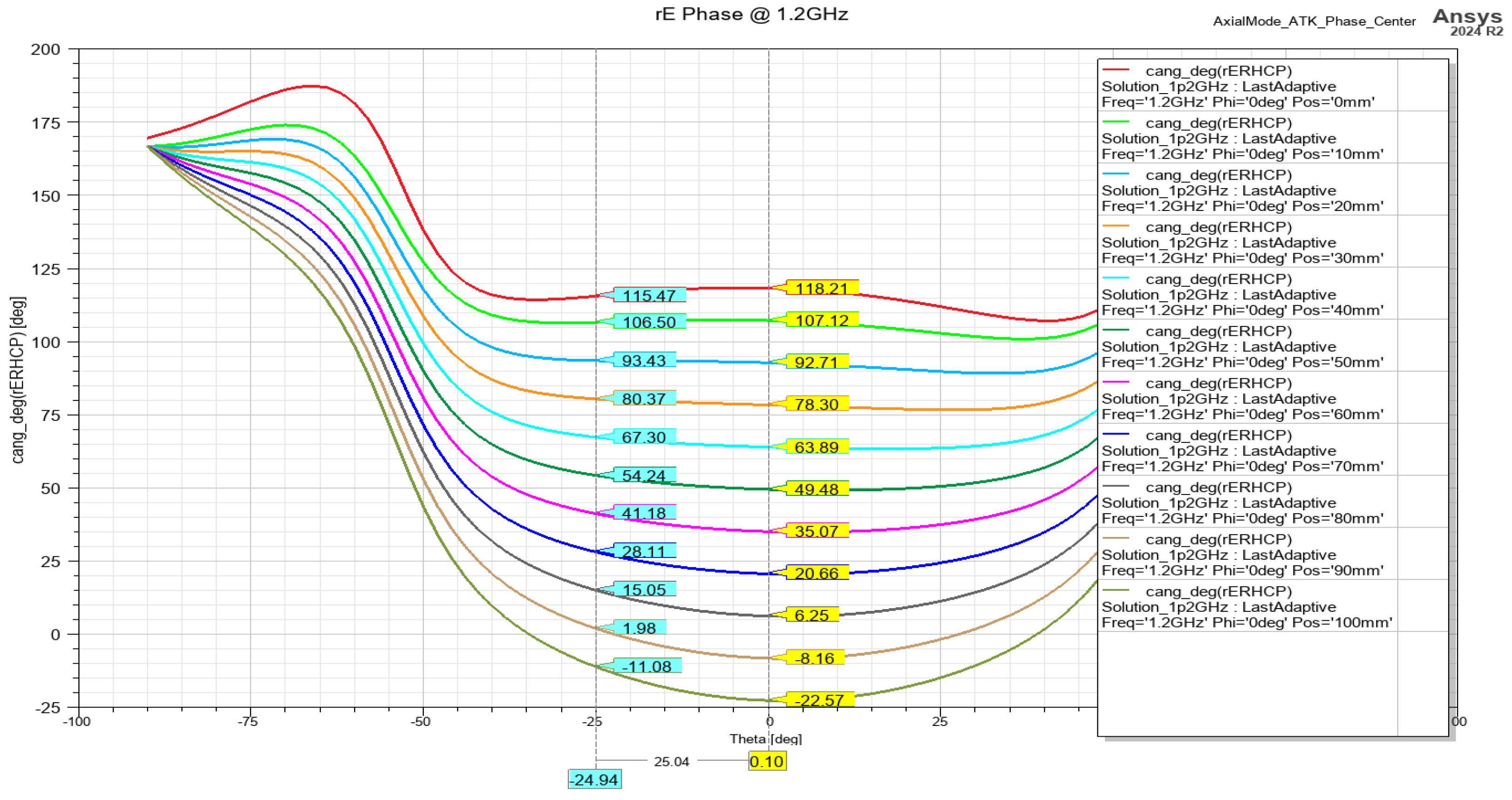
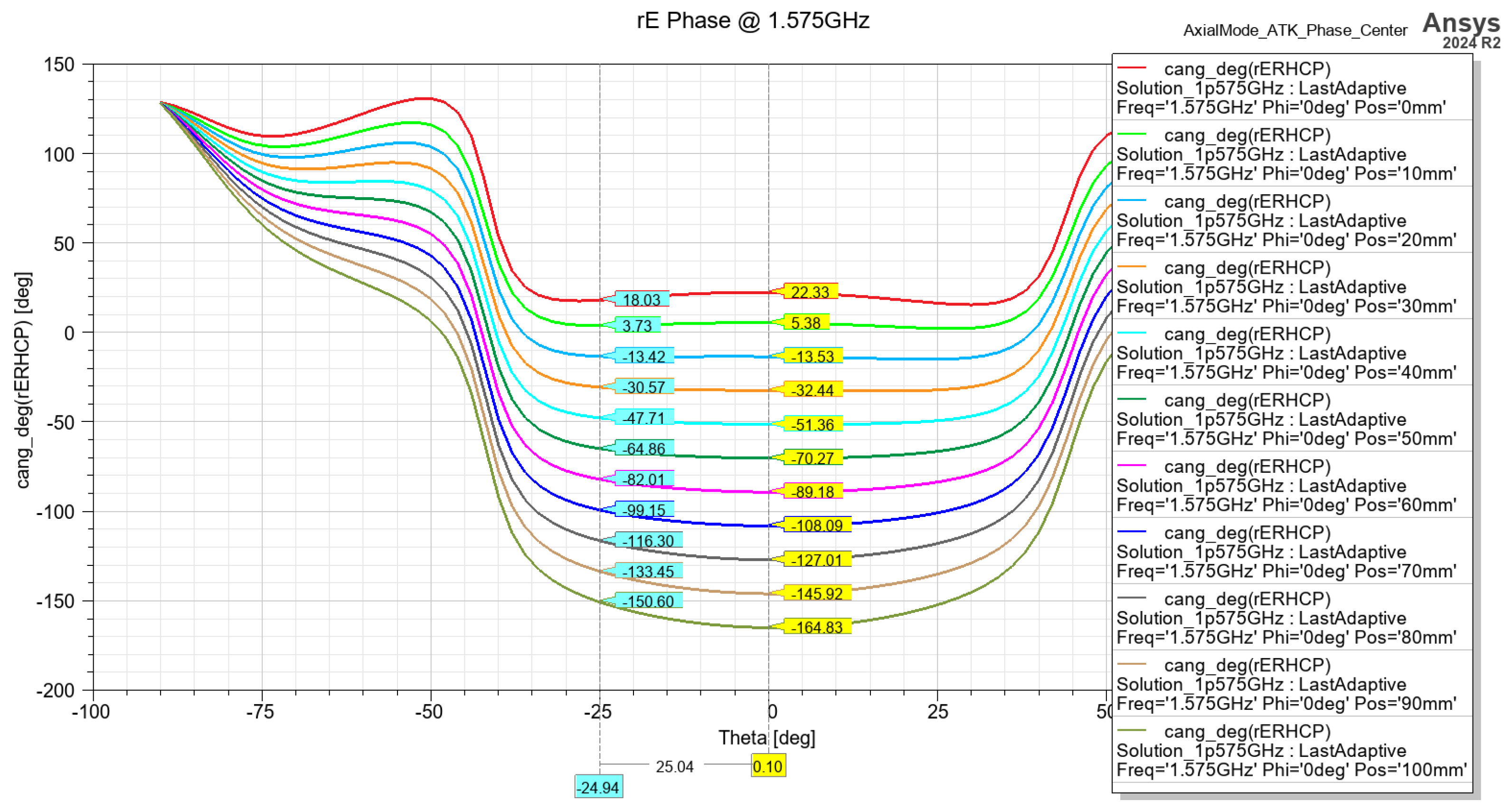
2.2. Helix Antenna Design
3. Results
- Ceramic size: upper patch—20 × 20 mm, bottom patch—35 × 35 mm.
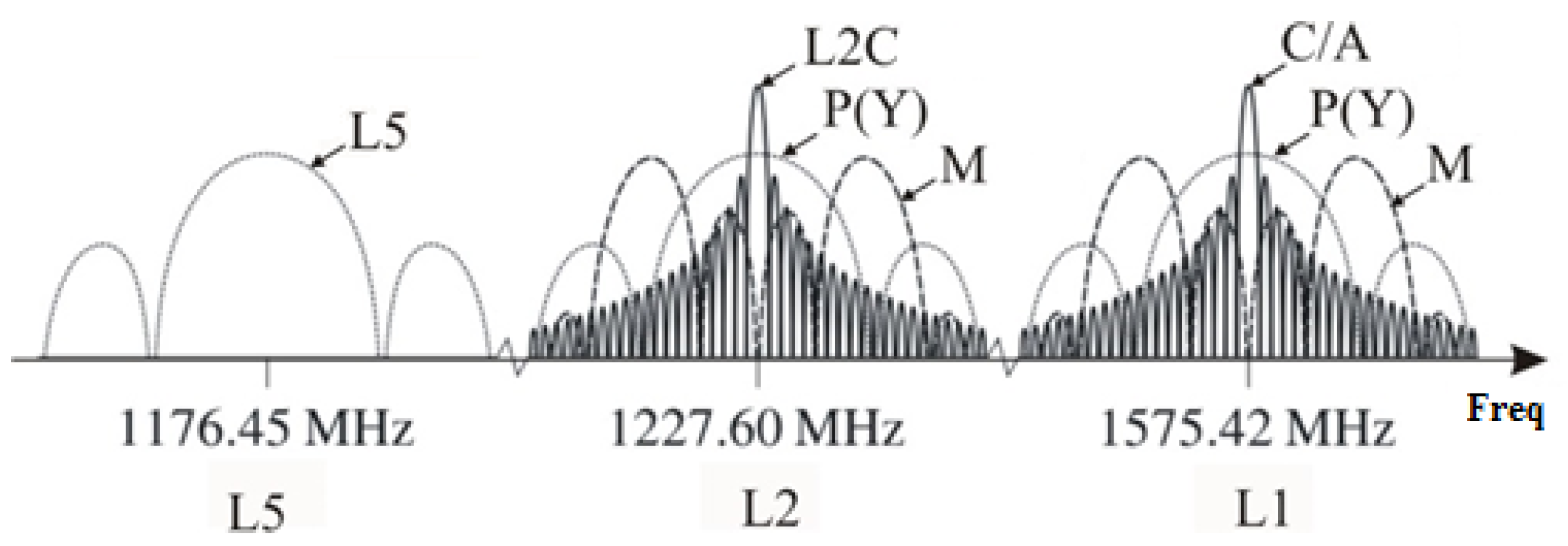
- Frequencies: GPS (L1/L5), Galileo (E1), GLONASS (L1), Beidou (B1).
- Gain: L1: 5 ± 1 dBi, L5: 3 ± 1 dBi.
- Bandwidth: min 10 MHz.
- Voltage Standing Wave Ratio (VSWR): ≤2.0.
- Low-noise amplifier (LNA): Gain (L1: 32 ± 3 dB, L5: 28 ± 3 dB); Noise Figure NF < 1.0 dB; VSWR < 2.0.
- NEO-F10T (from U-blox AG company)—L1/L5 bands GNSS receiver.
- ME32GR01 (from MinewSemi Co., Ltd.)—L1/L5 bands GNSS receiver.
- ATGM332D (from Zhongkewei Group)—L1 band GNSS receiver.
4. Discussion
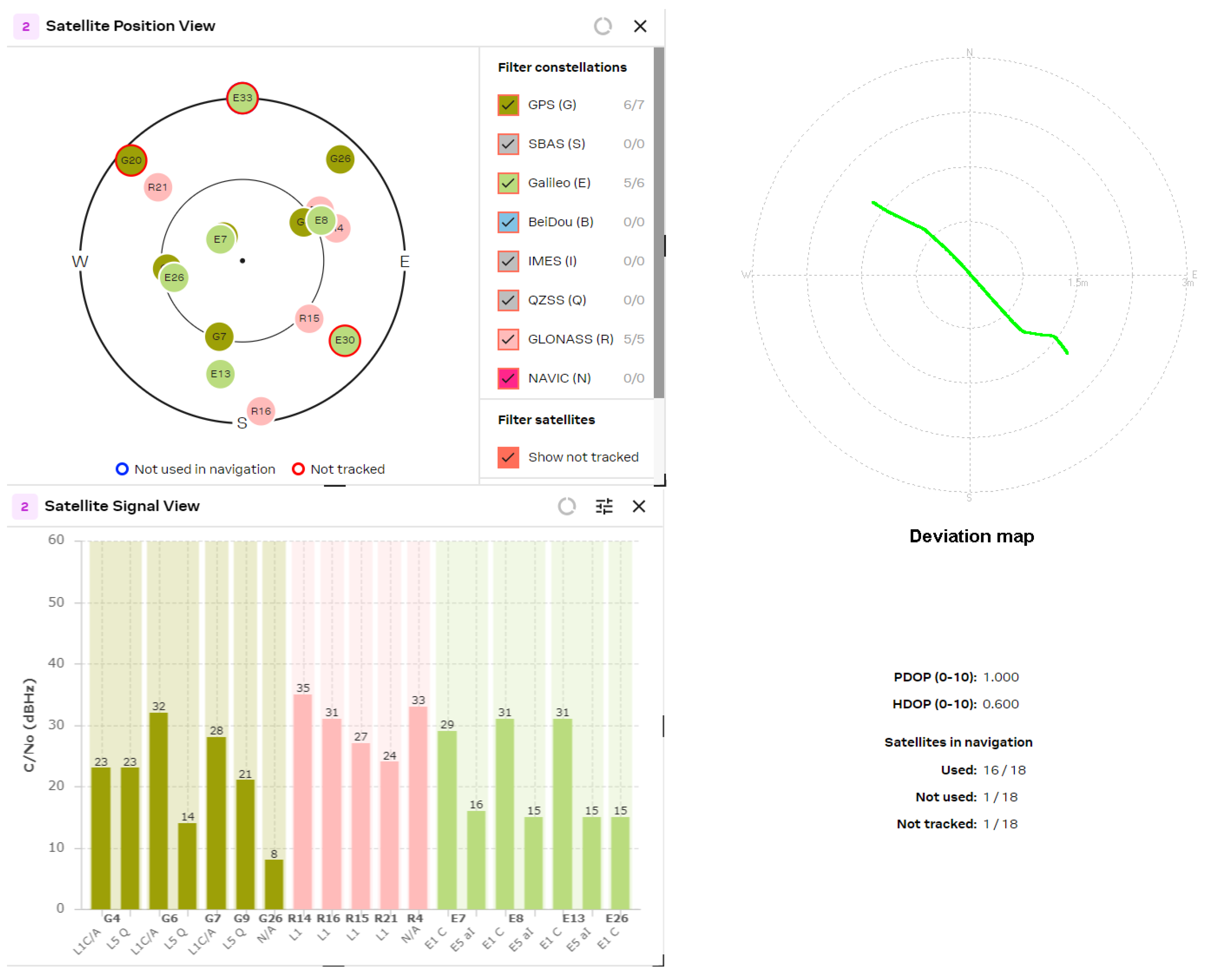
- NEO-F10T (from U-blox AG company)—determination of PDOP and HDOP coefficients. Best results obtained: PDOP = 1.0; HDOP = 0.7.
- ME32GR01 (from MinewSemi Co., Ltd.)—determination of PDOP and HDOP coefficients. Best results obtained: PDOP = 1.0; HDOP = 0.6.
- ATGM332D (from Zhongkewei Group)—determination of PDOP and HDOP coefficients. Best results obtained: PDOP = 1.6; HDOP = 1.4.
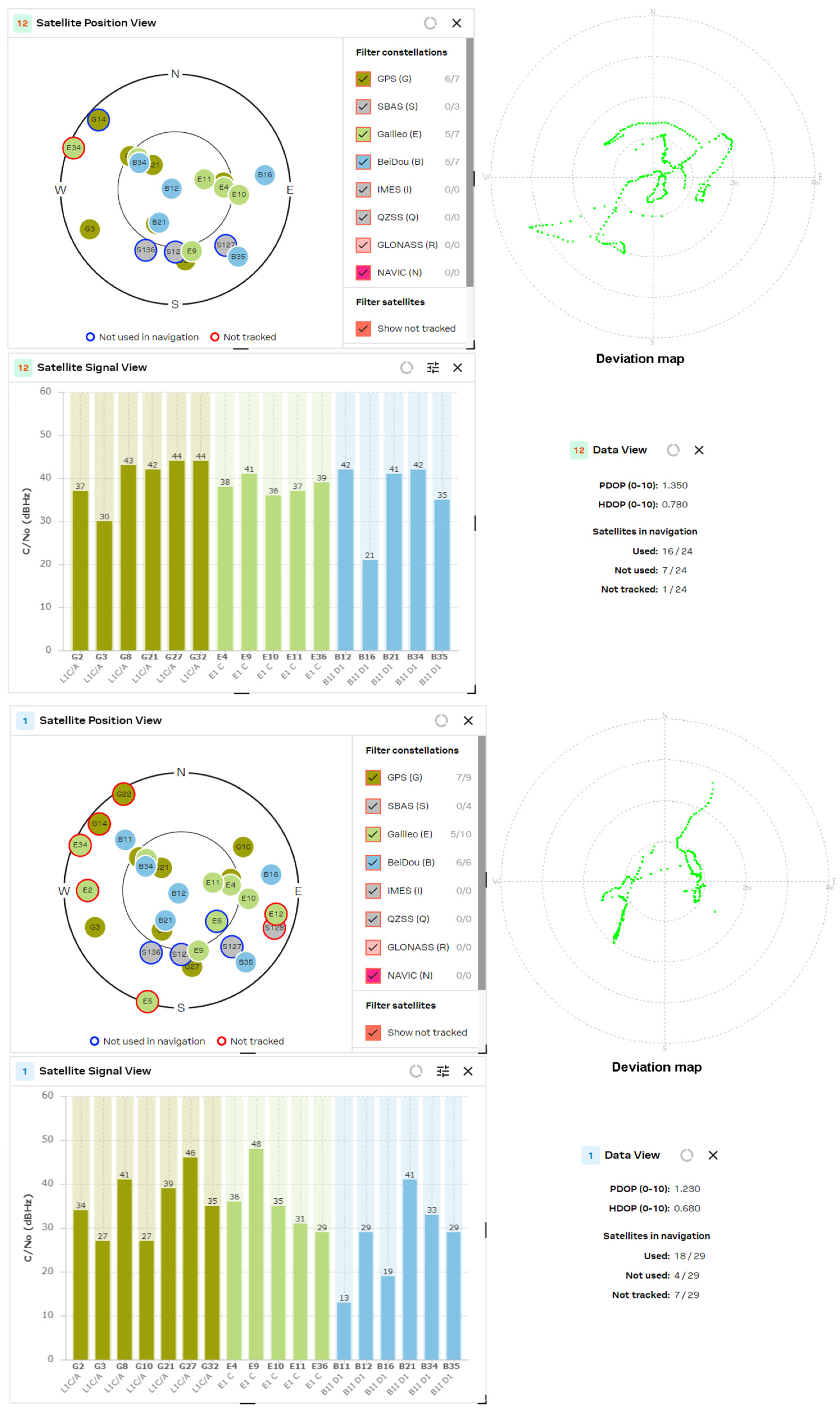
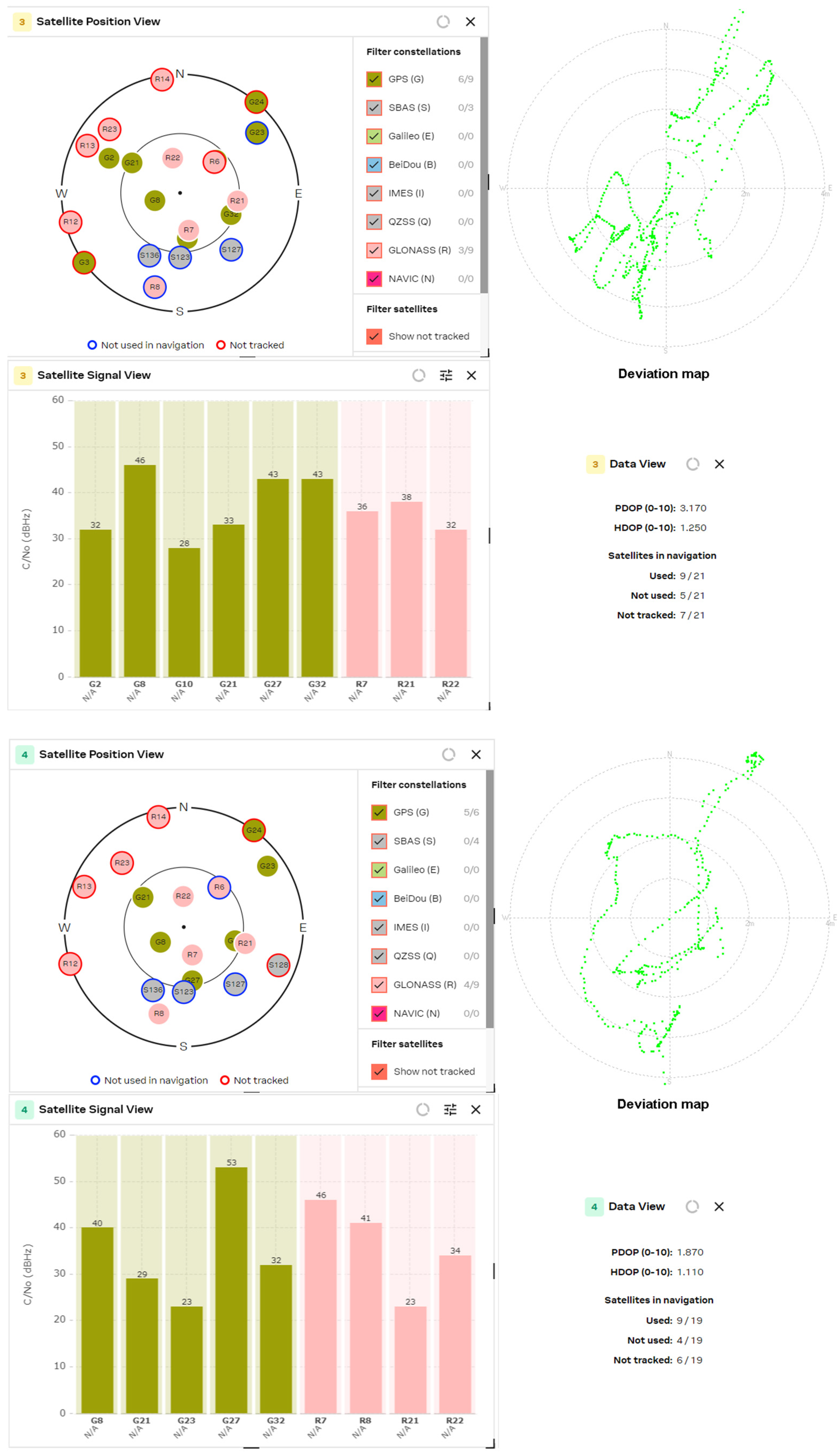
- The number of processing satellites is approximately equal for GNSS modules with active patch and passive helix antenna. The wider radiation pattern of the patch antenna is compensated for by the higher gain of the helix antenna. In the multi-constellation cases, where the number of tracked satellites exceeded 16, it is well observed that lots of satellites are not used in navigation or are not tracked.
- If the GNSS receiver used only one constellation (for example, MS32SN1), then the number of processed satellite signals did not exceed 10. This significantly increases the HDOP values to [0.9, 1.0] and PDOP values to [1.3, 1.4]. The same situation appears if the GNSS receiver uses only a fraction of the received signals to calculate the position, as in the case of the MAX M8Q module and multi-constellation reception of GPS and GLONASS signals.
- The comparison of the results from the MAX M8Q and MAX M10S receivers shows significant improvement in the number of used constellations from 2 to 4 and the number of the processed satellite signals from 8 ÷ 10 to 16 ÷ 20, which reduced the HDOP value down to 0.6.
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BDS | BeiDou Navigation Satellite System |
| BPSK | Binary Phased Shift Keying |
| C/A | Coarse/Acquisition |
| C/No | Carrier-to-Noise |
| CMOS | Complementary Metal-Oxide-Semiconductor |
| cps | chips per second |
| CPU | Central Processing Unit |
| DOP | Dilution of precision |
| HDOP | Horizontal Dilution of Precision |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IMU | Inertial Measurement Unit |
| LNA | Low-noise amplifier |
| LDO | Low drop-out |
| MBOC | Multiplexed Binary Offset Carrier |
| NF | Noise Figure |
| PDOP | Position Dilution of Precision |
| PPP | Precise point positioning |
| PRN | Pseudo-Random Noise |
| RHCP | Right-Hand Circular Polarization |
| SPS | Standard Positioning Service |
| VSWR | Voltage Standing Wave Ratio |
| XPD | Cross-Polar Discrimination |
References
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of Using Low-Cost Dual-Frequency GNSS Receivers for Land Surveying. Sensors 2021, 21, 1956. [Google Scholar] [CrossRef] [PubMed]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2014, 19, 151–163. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Niu, X.; Gao, Z. Tightly-Coupled integration of Multi-GNSS single-frequency RTK and MEMS-IMU for enhanced positioning performance. Sensors 2017, 17, 2462. [Google Scholar] [CrossRef] [PubMed]
- Odolinski, R.; Teunissen, P.J.G. Low-cost, high-precision, single-frequency GPS–BDS RTK positioning. GPS Solut. 2017, 21, 1315–1330. [Google Scholar] [CrossRef]
- Wen, Z.C.; Li, Y.; Guo, X.L.; Zhang, X.X. Design and Evaluation of GNSS/INS Tightly-Coupled Navigation Software for Land Vehicles. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLVI-3/W1-2022, 7th International Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS 2022), Wuhan, China, 18–19 March 2022. [Google Scholar]
- Moorefield, F.D., Jr. Global Positioning System Standard Positioning Service Performance Standard, Integrity—Service—Excellence, 5th ed.; Department of Defense: Washington, DC, USA, 2020. [Google Scholar]
- Global Positioning System Precise Positioning Service Performance Standard, Integrity—Service—Excellence. February 2007. Available online: https://www.gps.gov/technical/ps/2007-PPS-performance-standard.pdf (accessed on 9 September 2024).
- Hyoung, R.J.; Gankhuyag, G.; Chong, K.T. Navigation System Heading and Position Accuracy Improvement through GPS and INS Data Fusion. J. Sens. 2016, 2016, 7942963. [Google Scholar] [CrossRef]
- Andreas, S. Joint RTK and Attitude Determination; Institute for Communications and Navigation: Weßling, Germany, 2015. [Google Scholar]
- Stempfhuber, W.; Buchholz, M. A precise, low cost RTK GNSS system for UAV applications. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2011, XXXVIII-1/C22, 289–293. [Google Scholar] [CrossRef]
- Bellone, T.; Dabove, P.; Manzino, A.M.; Taglioretti, C. Real-time monitoring for fast deformations using GNSS low-cost receivers. Geomat. Nat. Hazards Risk 2016, 7, 458–470. [Google Scholar] [CrossRef]
- Melendez-Pastor, C.; Ruiz-Gonzalez, R.; Gomez-Gil, J. A Data Fusion System of GNSS Data and On-Vehicle Sensors Data for Improving Car Positioning Precision in Urban Environments. Expert Syst. Appl. 2017, 80, 28–38. [Google Scholar] [CrossRef]
- Zhu, R.; Wang, Y.; Cao, H.; Yu, B.; Gan, X.; Huang, L.; Zhang, H.; Li, S.; Jia, H.; Chen, J. RTK/Pseudolite/LAHDE/IMU-PDR Integrated Pedestrian Navigation System for Urban and Indoor Environments. Sensors 2020, 20, 1791. [Google Scholar] [CrossRef]
- Liu, H. BPSK/BOC Modulation Signal System for GPS Satellite Navigation Signals. Phys. Conf. Ser. 2022, 2384, 012023. [Google Scholar] [CrossRef]
- L1C PRN Code Assignment. June 2021. Available online: https://www.gps.gov/technical/prn-codes/L1C-PRN-code-assignments-2021-Jun.pdf (accessed on 9 September 2024).
- Ye, H.; Jing, X.; Liu, L.; Wang, M.; Hao, S.; Lang, X.; Yu, B. Analysis of Quasi-Zenith Satellite System Signal Acquisition and Multiplexing Characteristics in China Area. Sensors 2020, 20, 1547. [Google Scholar] [CrossRef] [PubMed]
- Das, A.; Dubbelman, G. An Experimental study on relative and absolute pose graph fusion for vehicle localization. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Karlsson, E.; Mohammadiha, N. A statistical GPS error model for autonomous driving. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, Suzhou, China, 26–30 June 2018. [Google Scholar]
- Jiang, C.; Zhao, D.; Zhang, Q.; Liu, W. A Multi-GNSS/IMU Data Fusion Algorithm Based on the Mixed Norms for Land Vehicle Applications. Remote Sens. 2023, 15, 2439. [Google Scholar] [CrossRef]
- Falco, G.; Pini, M.; Marucco, G. Loose and Tight GNSS/INS Integrations: Comparison of Performance Assessed in Real Urban Scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Norwood, Australia, 2013. [Google Scholar]
- Petovello, M.G. Real-Time Integration of a Tactical Grade IMU and GPS for High-Accuracy Positioning and Navigation. Ph. D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2003. [Google Scholar]
- InvenSense. Document Number: DS-000347, Revision: 1.8, Rev. Date: 27 July 2023. Available online: https://invensense.tdk.com/wp-content/uploads/2022/12/DS-000347-ICM-42688-P-v1.7.pdf (accessed on 9 September 2024).
- Alexiev, K.; Nikolova, I. An algorithm for error reducing in IMU. In Proceedings of the 2013 IEEE International Symposium on Innovations in Intelligent Systems and Applications (INISTA), Albena, Bulgaria, 19–21 June 2013. [Google Scholar] [CrossRef]
- Alaba, S.Y. GPS-IMU Sensor Fusion for Reliable Autonomous Vehicle Position Estimation. arXiv 2024, arXiv:2405.08119v1. [Google Scholar]
- Wei, Y.; Li, Y. Impact of Sensor Data Sampling Rate in GNSS/INS Integrated Navigation with Various Sensor Grades. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLVI-3/W1-2022, 7th Intl. Conference on Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS 2022), Wuhan, China, 18–19 March 2022. [Google Scholar]
- Nasiri, M.; Zahiri, S.-H.; Havangi, R. Design an Adaptive Kalman Filter for INS/GPS based navigation for a vehicular system. Int. J. Comput. Sci. Inf. Secur. (IJCSIS) 2016, 14, 558–567. [Google Scholar]
- Wanninger, L.; Heßelbarth, A.; Frevert, V. Garmin GPSMAP 66sr: Assessment of Its GNSS Observations and Centimeter-Accurate Positioning. Sensors 2022, 22, 1964. [Google Scholar] [CrossRef]
- Nakano, H.; Samada, Y.; Yamauchi, J. Axial mode helical antennas. IEEE Trans. Antennas Propag. 1986, 34, 1143–1148. [Google Scholar] [CrossRef]
- Djordfevic, A.R.; Zajic, A.G.; Ilic, M.M.; Stuber, G.L. Optimization of Helical antennas [Antenna Designer’s Notebook]. IEEE Antennas Propag. Mag. 2006, 48, 107–115. [Google Scholar] [CrossRef]
- Chen, C.S.; Chen, Y.J.; Yeh, T.-K. The impact of GPS antenna phase center offset and variation on the positioning accuracy. Boll. Geod. Sci. Afffini 2000, 9, 1–22. [Google Scholar]
- Krzan, G.; Dawidowicz, K.; Paziewski, J. Low-cost GNSS antennas in precise positioning: A focus on multipath and antenna phase center models. GPS Solut. 2024, 28, 103. [Google Scholar] [CrossRef]
- Zhang, Z.; Sun, R. Improving Loosely Coupled GNSS/IMU Fusion Performance with Pseudorange Error Prediction in Urban Areas. In Advances in Guidance, Navigation and Control, ICGNC 2022; Lecture Notes in Electrical Engineering; Yan, L., Duan, H., Deng, Y., Eds.; Springer: Singapore, 2023; Volume 845. [Google Scholar] [CrossRef]
- Miletiev, R.; Iontchev, E.; Yordanov, R. Design of navigation system with multiband GNSS receiver with RTK and DR algorithms. In Proceedings of the 56th International Scientific Conference on Information, Communication and Energy Systems and Technologies (ICEST), Sozopol, Bulgaria, 16–18 June 2021. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [PubMed]
- Weaver, S.A.; Ucar, Z.; Bettinger, P.; Merry, K. How a GNSS Receiver Is Held May Affect Static Horizontal Position Accuracy. PLoS ONE 2015, 10, e0124696. [Google Scholar] [CrossRef] [PubMed]
- Yao, X.; Chen, M.; Wang, J.; Chen, R. Quality Analysis of GNSS Data in Polar Region. In Proceedings of the China Satellite Navigation Conference (CSNC) 2019 Proceedings, Beijing, China, 22–25 May 2019. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency Band | PRN Code | Code Length [Chip] | Code Baud Rate [Mcps] | Modulation Scheme | Bandwidth [MHz] | Data Baud Rate [sps/bps] | |
|---|---|---|---|---|---|---|---|
| L1 | C/A | 1023 | 1.023 | BPSK 1 (1) | 2.046 | 50/50 | |
| P | ~7 days | 10.23 | BPSK (10) | 20.46 | 50/50 | ||
| M | - | 5.115 | BOC 2 (10.5) | 30.69 | - | ||
| L1CD 3 | 10,230 | 1.023 | BOC (1.1) | 4.092 | 100/50 | ||
| L1Cp 3 | 102,301,800 | 1.023 | BOC (1.1) | 4.092 | - | ||
| L2 | P | ~7 days | 10.23 | BPSK (10) | 20.46 | 50/50 | |
| L2C | M | 10,230 | 1.023 | BPSK (1) | 2.046 | 50/25 | |
| L | 767,250 | - | |||||
| M | 5.115 | BOC (10.5) | 30.69 | - | |||
| L5 | L5I 4 | 10,230.10 | 10.23 | BPSK (10) | 20.46 | 100/50 | |
| L5Q 4 | 10,230.20 | 10.23 | BPSK (10) | 20.46 | - | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miletiev, R.; Petkov, P.Z.; Yordanov, R.; Brusev, T. Study of Global Navigation Satellite System Receivers’ Accuracy for Unmanned Vehicles. Sensors 2024, 24, 5909. https://doi.org/10.3390/s24185909
Miletiev R, Petkov PZ, Yordanov R, Brusev T. Study of Global Navigation Satellite System Receivers’ Accuracy for Unmanned Vehicles. Sensors. 2024; 24(18):5909. https://doi.org/10.3390/s24185909
Chicago/Turabian StyleMiletiev, Rosen, Peter Z. Petkov, Rumen Yordanov, and Tihomir Brusev. 2024. "Study of Global Navigation Satellite System Receivers’ Accuracy for Unmanned Vehicles" Sensors 24, no. 18: 5909. https://doi.org/10.3390/s24185909