
Numerical Investigation on the Influence of Turbine Rotor Parameters on the Eddy Current Sensor for the Dynamic Blade Tip Clearance Measurement


Abstract
:1. Introduction
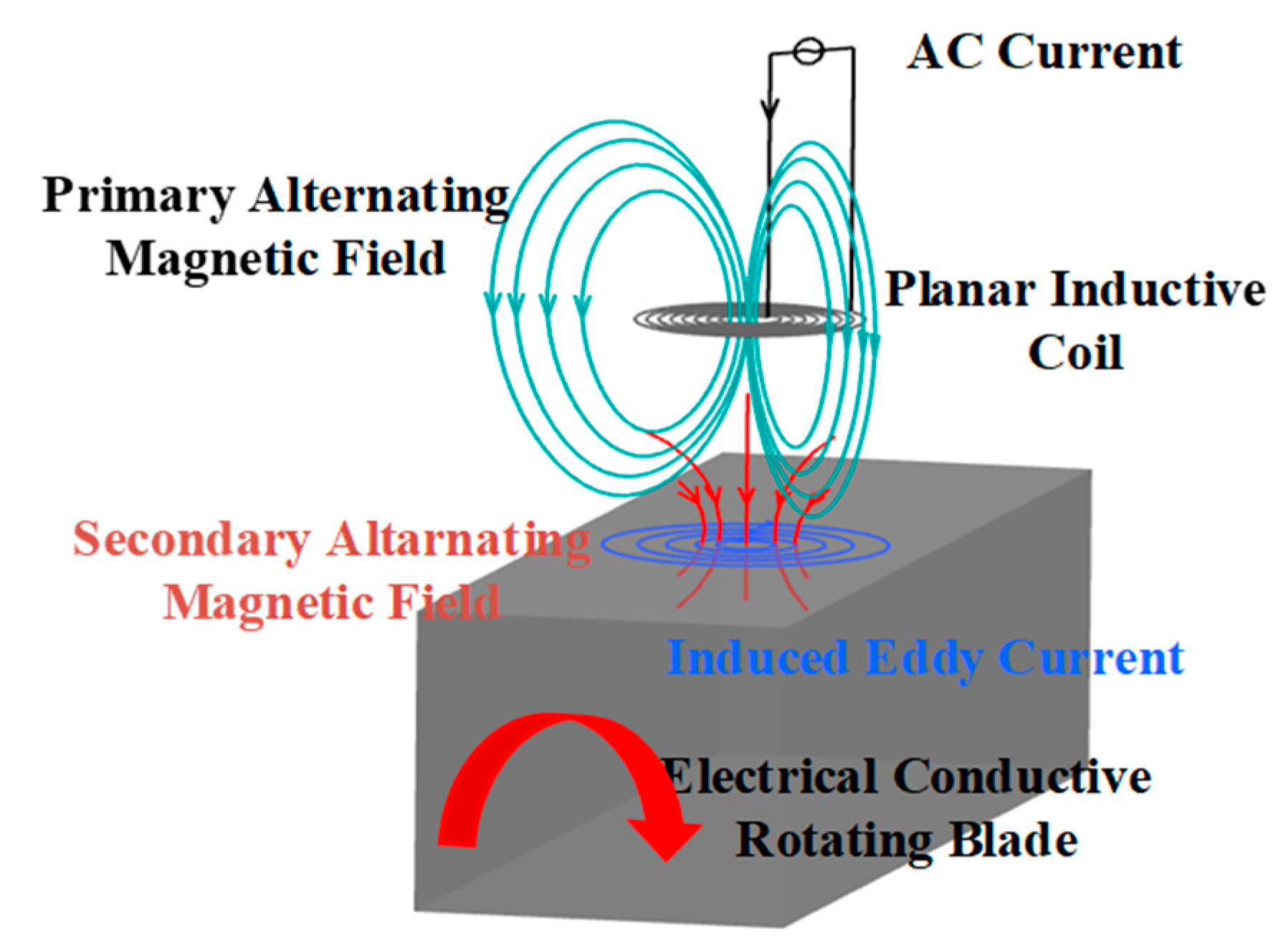
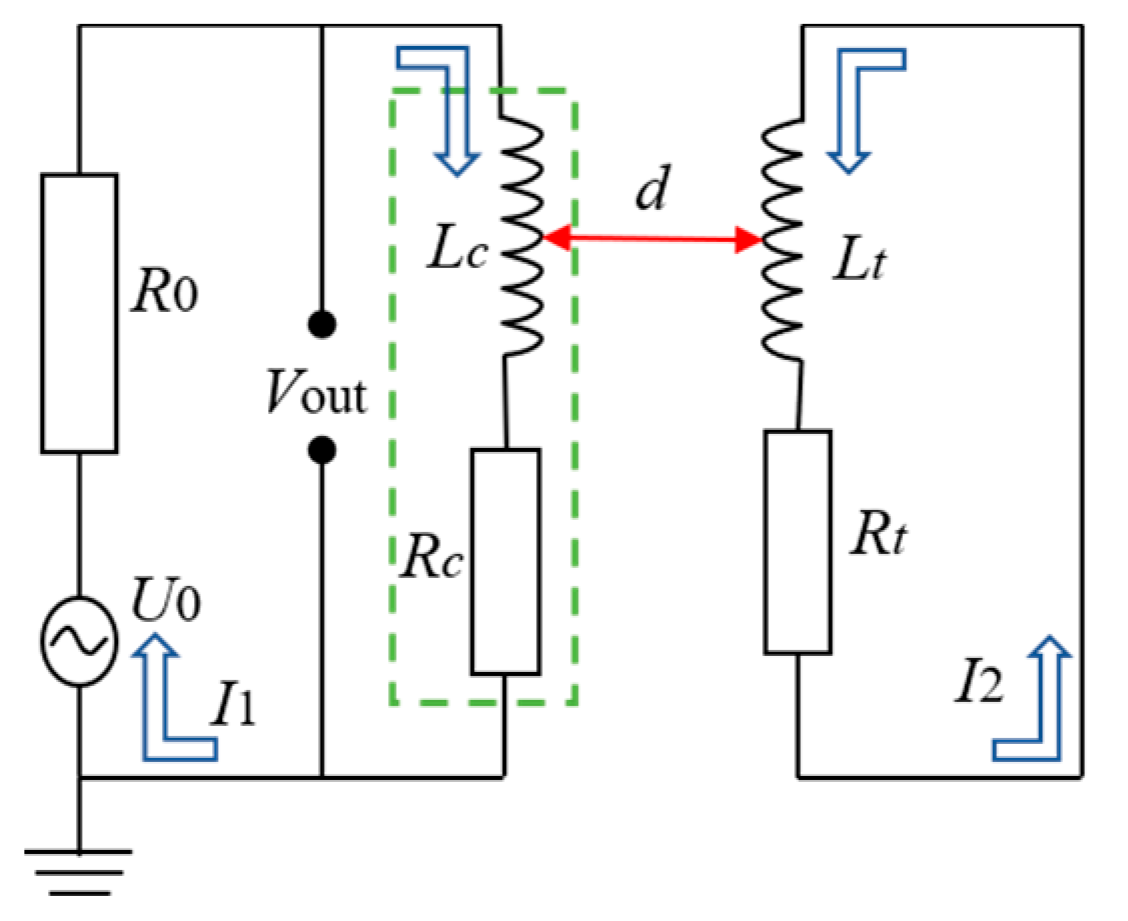
2. Principle of ECS in BTC Measurement
3. Numerical Modeling
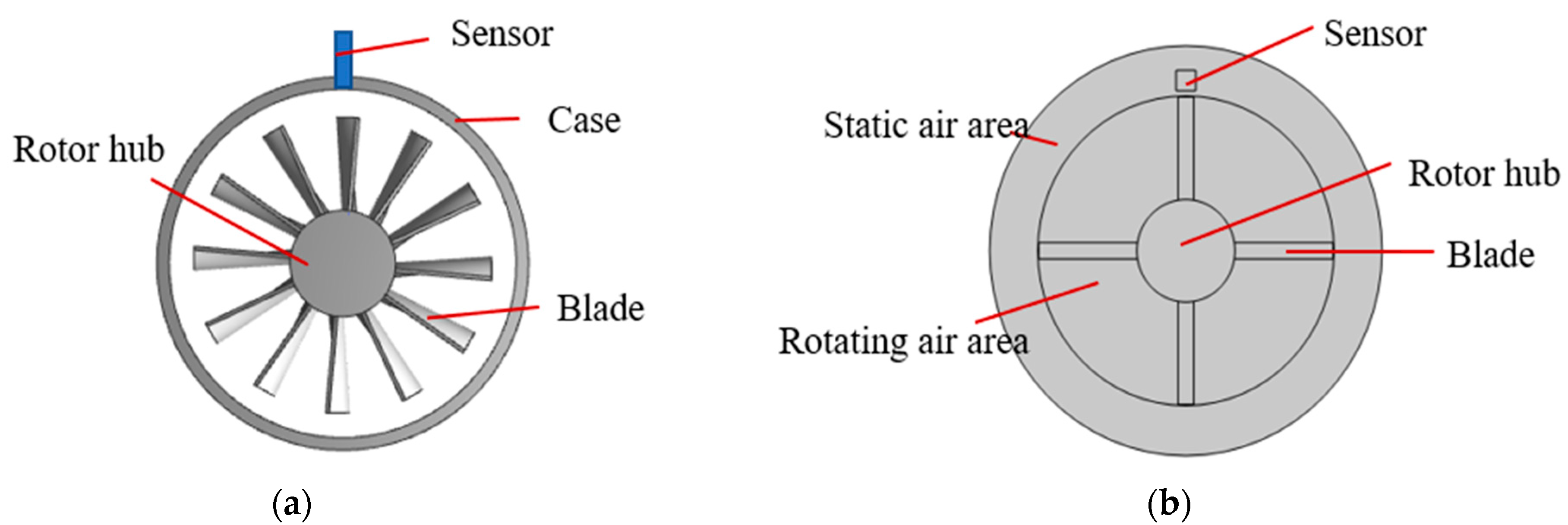
3.1. Finite Element Analysis Model
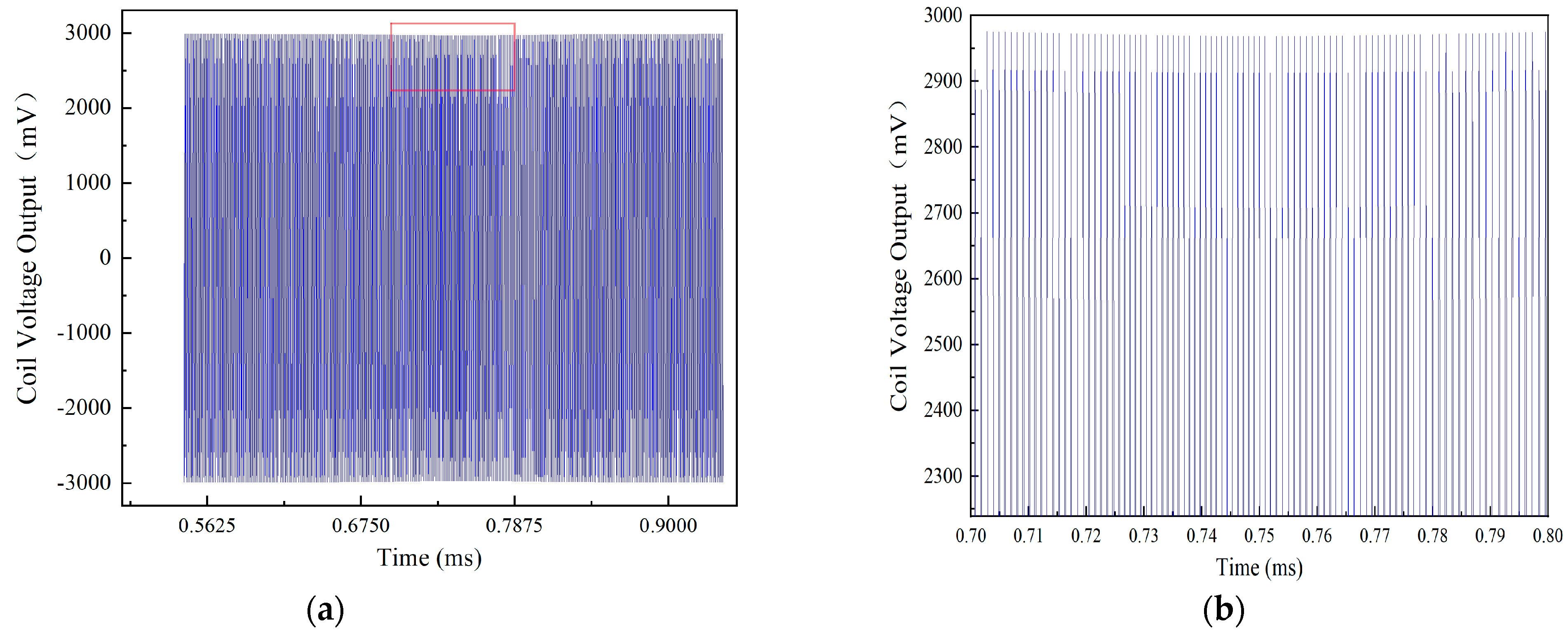
3.2. Data Processing
3.3. Mesh Refinement Study
3.4. Setting the Time Step
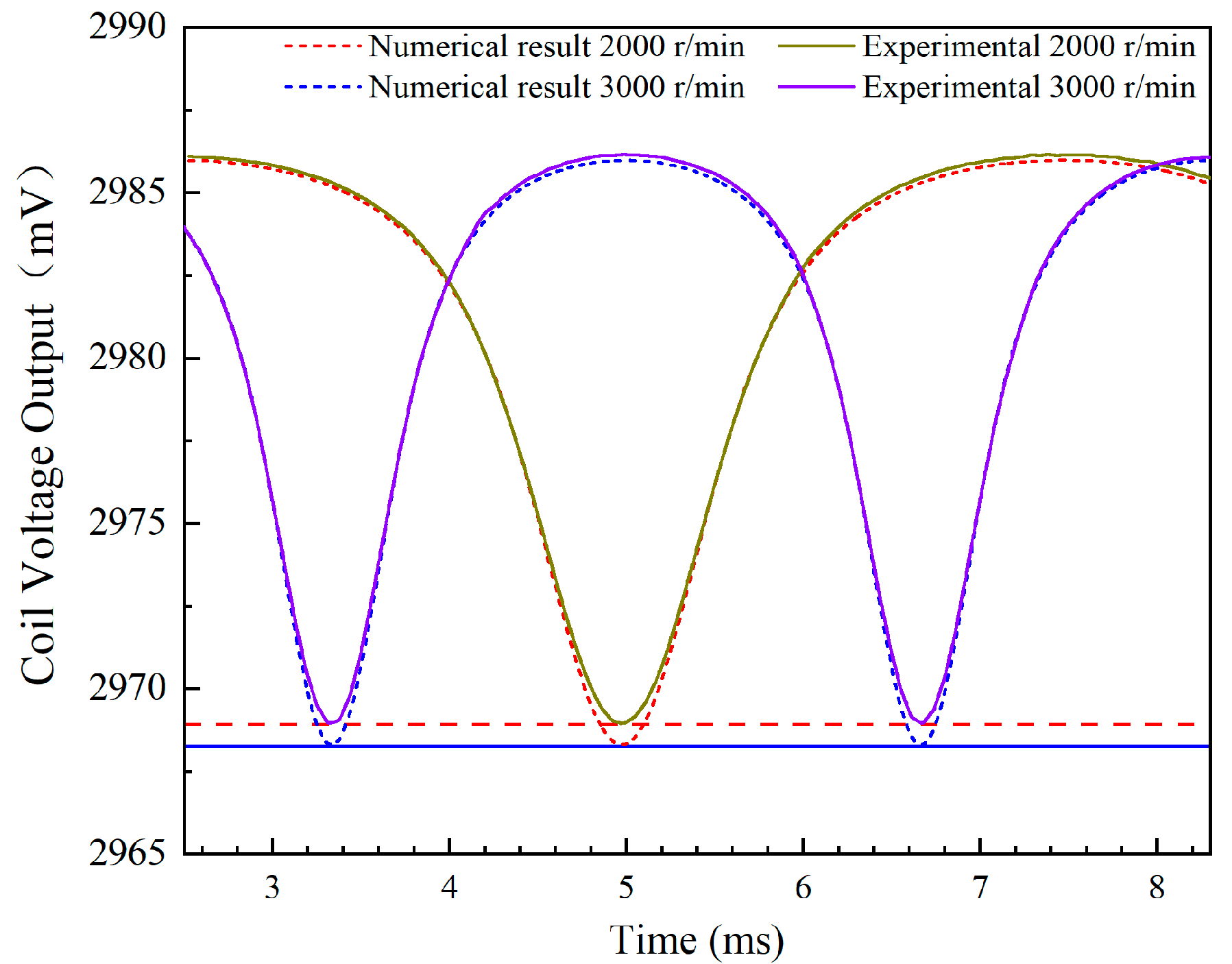
3.5. Numerical Computation Model Validation
4. Results and Discussion
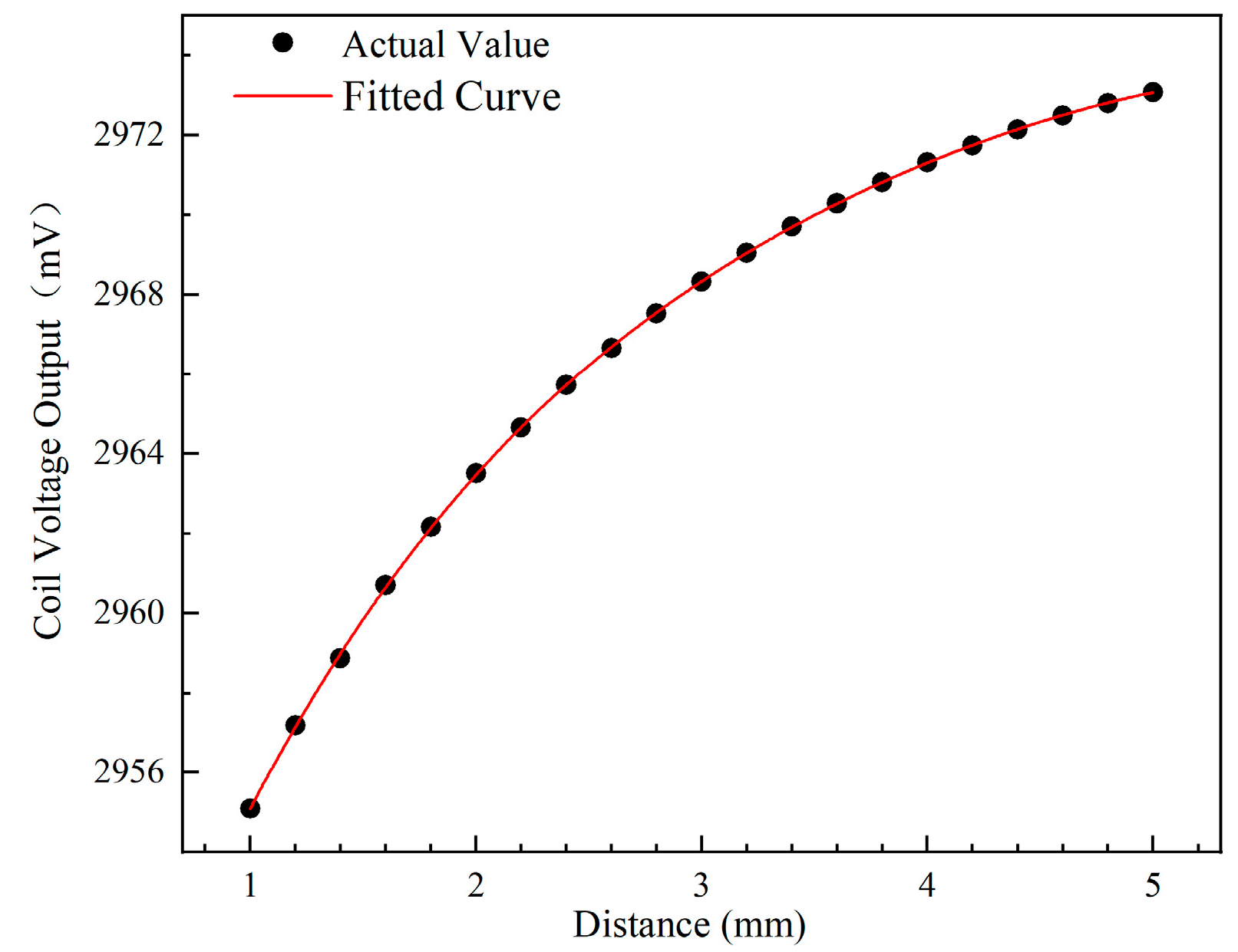
4.1. Characteristic Calibration
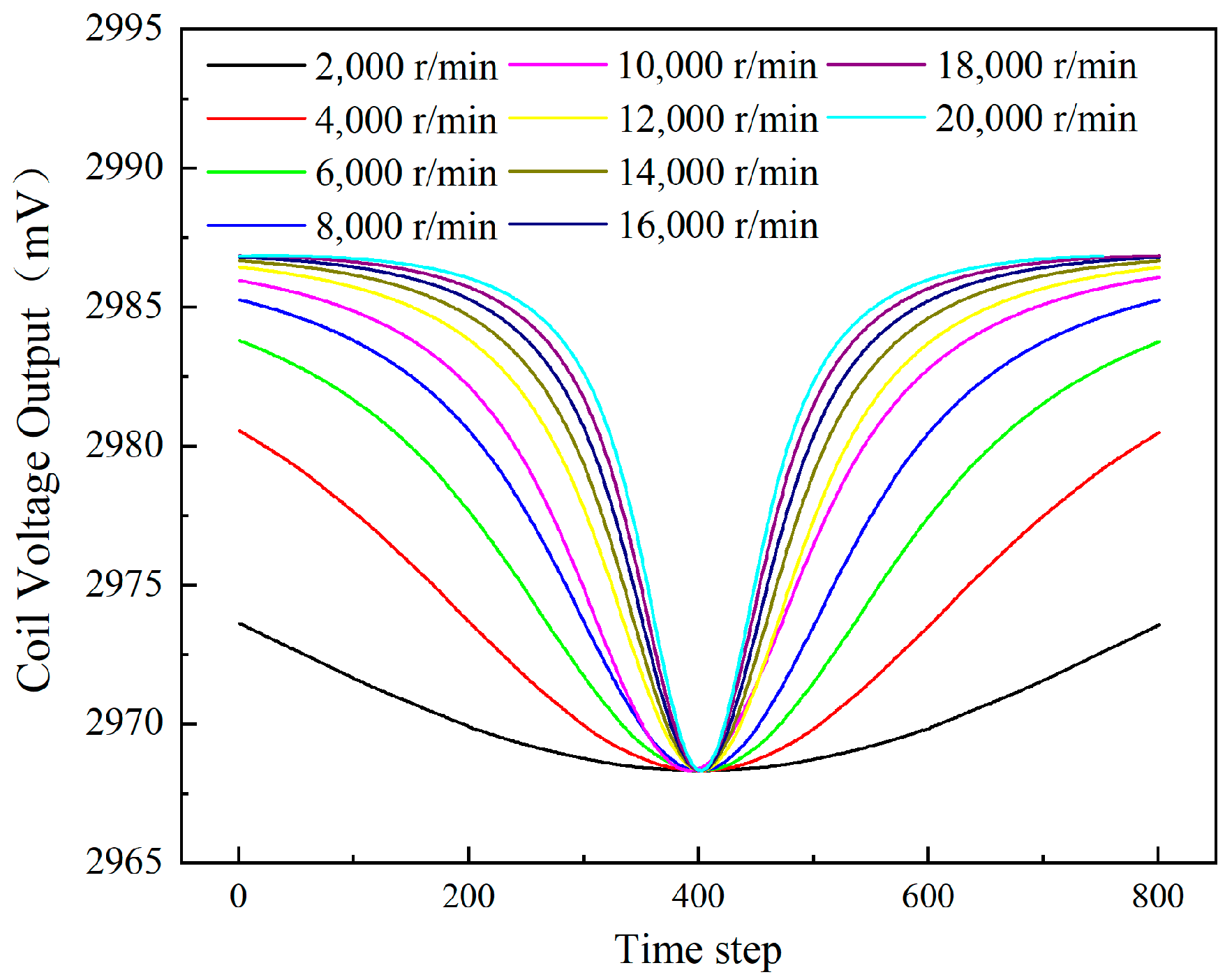
4.2. Rotation Speed
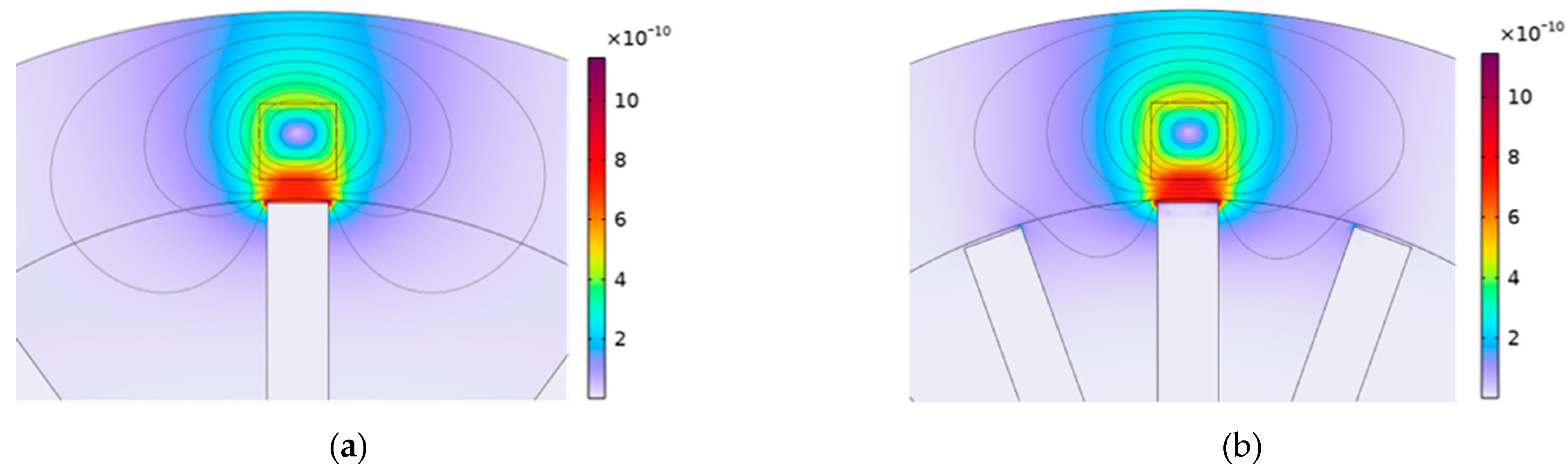
4.3. Blade Number
4.4. Blade Length
4.5. Radius of the Rotor Hub
5. Conclusions
- Rotation Speed Variation: The variation in rotation speed has no effect on the ECS voltage output. This finding implies that an ECS calibrated at a single speed can be reliably used for BTC measurements across different rotational speeds.
- Geometric Parameter Sensitivity: Parameters such as blade number, blade length, and rotor hub radius significantly impact the ECS output. Notably, the trend in ECS voltage output changes differently with blade length or rotor hub radius compared to an increase in blade number. Specifically, while an increase in blade number raises the ECS voltage output, increases in blade length or rotor hub radius produce an opposite trend.
- Calibration Under Dynamic Conditions: For accurate BTC measurement using ECS, it is essential to calibrate the sensor against the actual measurement target and under dynamic conditions. This approach helps establish a reliable baseline, thereby enhancing the precision of clearance measurements.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Booth, T.C.; Dodge, P.R.; Hepworth, H.K. Rotor-tip Leakage: Part I—Basic Methodology. J. Engine Power 1982, 104, 154–161. [Google Scholar] [CrossRef]
- Mohamed, M.H.; Shaaban, S. Optimization of blade pitch angle of an axial turbine used for wave energy conversion. Energy 2013, 56, 229–239. [Google Scholar] [CrossRef]
- Hao, J. The investigation about civil aviation engine surge problem: The final solution for PW4000-94′’ engine group 3 surge. In Proceedings of the 15th Aeroengine Design, Manufacturing and Application Technology Symposium, Beijing, China, 25–27 May 2013. [Google Scholar]
- Graf, M.B.; Wong, T.S.; Greitzer, E.M.; Marble, F.E.; Tan, C.S.; Shin, H.W.; Wisler, D.C. Effects of non-axisymmetric tip clearance on axial compressor performance and stability. J. Turbomach. 1998, 120, 648–661. [Google Scholar] [CrossRef]
- Lavagnoli, S.; Paniagua, G.; Tulkens, M.; Steiner, A. High-fidelity rotor gap measurements in a short-duration turbine rig. Mech. Syst. Signal Process. 2012, 27, 590–603. [Google Scholar] [CrossRef]
- García, I.; Beloki, J.; Zubia, J.; Aldabaldetreku, G.; Illarramendi, M.A.; Jiménez, F. An optical fiber bundle sensor for tip clearance and tip timing measurements in a turbine rig. Sensors 2013, 13, 7385–7398. [Google Scholar] [CrossRef] [PubMed]
- Durana, G.; Amorebieta, J.; Fernandez, R.; Beloki, J.; Arrospide, E.; Garcia, I.; Zubia, J. Design, fabrication and testing of a high-sensitive fiber sensor for tip clearance measurements. Sensors 2018, 18, 2610. [Google Scholar] [CrossRef] [PubMed]
- Violetti, M.; Skrivervik, A.K.; Xu, Q.; Hafner, M. New microwave sensing system for blade tip clearance measurement in gas turbines. In Proceedings of the 11th IEEE Sensors Conference, Taipei, China, 28–31 October 2012. [Google Scholar]
- Sheard, A.G.; Turner, S.R. Electromechanical measurement of turbomachinery blade tip-to-casing running clearance. In Proceedings of the ASME 1992 International Gas Turbine and Aeroengine Congress and Exposition, Cologne, Germany, 1–4 June 1992. [Google Scholar]
- Haase, W.C.; Haase, Z.S. Advances in through-the-case eddy current sensors. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013. [Google Scholar]
- Tomassini, R.; Rossi, G.; Brouckaert, J.F. Blade tip clearance and blade vibration measurements using a magneto resistive sensor. In Proceedings of the 11th European Conference on Turbomachinery Fluid dynamics & Thermodynamics, Madrid, Spain, 23–27 March 2015. [Google Scholar]
- Tomassini, R. Blade Tip Timing and Blade Tip Clearance Measurement System Based on Magnetoresistive Sensors; Università degli Studi di Padova: Padova, Italy, 2016. [Google Scholar]
- Chana, K.S.; Cardwell MTSullivan, J.S. The development of a hot section eddy current sensor for turbine tip clearance measurement. In Proceedings of the ASME Turbo Expo 2013: Turbomachinery Technical Conference and Exposition, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar]
- Sridhar, V.; Chana, K.S. Tip-clearance measurements on an engine high pressure turbine using an eddy current sensor. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, Charlottesville, NC, USA, 26–30 June 2017. [Google Scholar]
- Sridhar, V.; Chana, K.S.; Pekris, M.J. High temperature eddy current sensor system for turbine blade tip clearance measurement. In Proceedings of the 12th European Conference on Turbomachinery Fluid Dynamics & Thermodynamics, Stockholm, Sweden, 3–7 April 2017. [Google Scholar]
- Chana, K.S.; Cardwell, D.N.; Russhard, P. The use of eddy current sensors for the measurement of rotor blade tip timing sensor development and engine testing. In Proceedings of the ASME Turbo Expo 2008: Turbomachinery Technical Conference and Exposition, Seoul, Republic of Korea, 13–17 June 2016. [Google Scholar]
- Han, Y.; Zhong, C.; Zhu, X.Y.; Zhe, J. Online monitoring of dynamic tip clearance of turbine blades in high temperature environments. Meas. Sci. Technol. 2017, 29, 045102. [Google Scholar] [CrossRef]
- Du, L.; Zhu, X.L.; Zhe, J. A High Sensitivity Inductive Sensor for Blade Tip Clearance Measurement. Smart Mater. Struct. 2014, 23, 065018–065027. [Google Scholar] [CrossRef]
- Hu, T.L.; Xie, H.H.; Yan, H.P. Measurement model of eddy current displacement sensor and its spatial filtering effect in blade tip gap measurement. J. Xiamen Univ. 2014, 1, 66–70. [Google Scholar]
- Zhao, Z.Y.; Liu, Z.X.; Lyu, Y.G.; Xu, X.X. Verification and design of high precision eddy current sensor for tip clearance measurement. In Proceedings of the ASME Turbo Expo, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Zhao, Z.Y.; Liu, Z.X.; Lyu, Y.G.; Xu, X.X. Design and verification of high resolution eddy current sensor for blade tip clearance measurement. Chin. J. Sci. Inst. 2018, 6, 132–139. [Google Scholar]
- Zhao, Z.Y.; Lyu, Y.G.; Liu, Z.X.; Zhao, L.Q. Experimental Investigation of High Temperature-Resistant Inductive Sensor for Blade Tip Clearance Measurement. Sensors 2019, 19, 61. [Google Scholar] [CrossRef] [PubMed]
- Jamia, N.; Friswell, M.I.; EI-Borgi, S.; Fernandes, R. Ralston Fernandes. Simulating eddy current sensor outputs for blade tip timing. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Jamia, N.; Friswell, M.I.; EI-Borgi, S.; Fernandes, R. Ralston Fernandes. Simulating eddy current sensor in blade tip timing application: Modeling and experimental validation. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Pittsburgh, PA, USA, 11–15 November 2018. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Unit | Description |
|---|---|---|---|
| R | 25 | mm | Radius of the rotor hub |
| L | 50 | mm | Blade length |
| b | 8 | mm | Blade width |
| w | 10 | mm | Sensor width |
| l | 10 | mm | Sensor length |
| Tip | 3 | mm | Gap between sensor and blade |
| Rs | R + L + 0.5 + 100 | mm | Radius of static air area |
| Rr | R + L + 0.5 | mm | Radius of rotating air area |
| n | 13 | turns | Number of turns in the coil |
| U | 3 | V | Voltage amplitude of the excitation |
| f | 1 | MHz | Frequency of the excitation |
| fs | 20 | MHz | Sampling frequency |
| t | 1/fs | s | Time step |
| R0 | 10 | Ω | Series resistance |
| N | 4 | Blade number |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Liu, F.; Lyu, Y.; Liu, Z.; Zhao, Z. Numerical Investigation on the Influence of Turbine Rotor Parameters on the Eddy Current Sensor for the Dynamic Blade Tip Clearance Measurement. Sensors 2024, 24, 5938. https://doi.org/10.3390/s24185938
Zhao L, Liu F, Lyu Y, Liu Z, Zhao Z. Numerical Investigation on the Influence of Turbine Rotor Parameters on the Eddy Current Sensor for the Dynamic Blade Tip Clearance Measurement. Sensors. 2024; 24(18):5938. https://doi.org/10.3390/s24185938
Chicago/Turabian StyleZhao, Lingqiang, Fulin Liu, Yaguo Lyu, Zhenxia Liu, and Ziyu Zhao. 2024. "Numerical Investigation on the Influence of Turbine Rotor Parameters on the Eddy Current Sensor for the Dynamic Blade Tip Clearance Measurement" Sensors 24, no. 18: 5938. https://doi.org/10.3390/s24185938