
Fault Diagnosis Method for Vacuum Contactor Based on Time-Frequency Graph Optimization Technique and ShuffleNetV2

Abstract
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Category | Reference | Method | Limitation |
|---|---|---|---|---|
| Feature extraction | Time-domain | [6] | Skewness, impulse factor | Not apparent during the early stages of equipment failure |
| [7] | Shape factor | |||
| [8] | Characteristic entropy | |||
| Frequency-domain | [10] | Envelope spectrum | Fail to capture the features of transient signals through Fourier transform | |
| [11] | Power spectrum | |||
| [12] | Cepstrum | |||
| Time-frequency domain | [15] | STFT | Feature extraction with fixed window functions or wavelet bases | |
| [16,17] | CWT | |||
| [20,21] | ST | |||
| Fault identification | Machine learning | [23,24] | BPNN | Poor-fitting performance for complex data |
| [25] | SVM | |||
| [26,27] | RF | |||
| Deep learning | [28] | AlexNet | Constrained feature learning capability due to the limited convolutional and pooling layers | |
| [29] | ResNet50 | The number of parameters grows as the layers deepen | ||
| [30] | ResNeXt50 | More computational resources are occupied due to the excessive group convolution |
- (1)
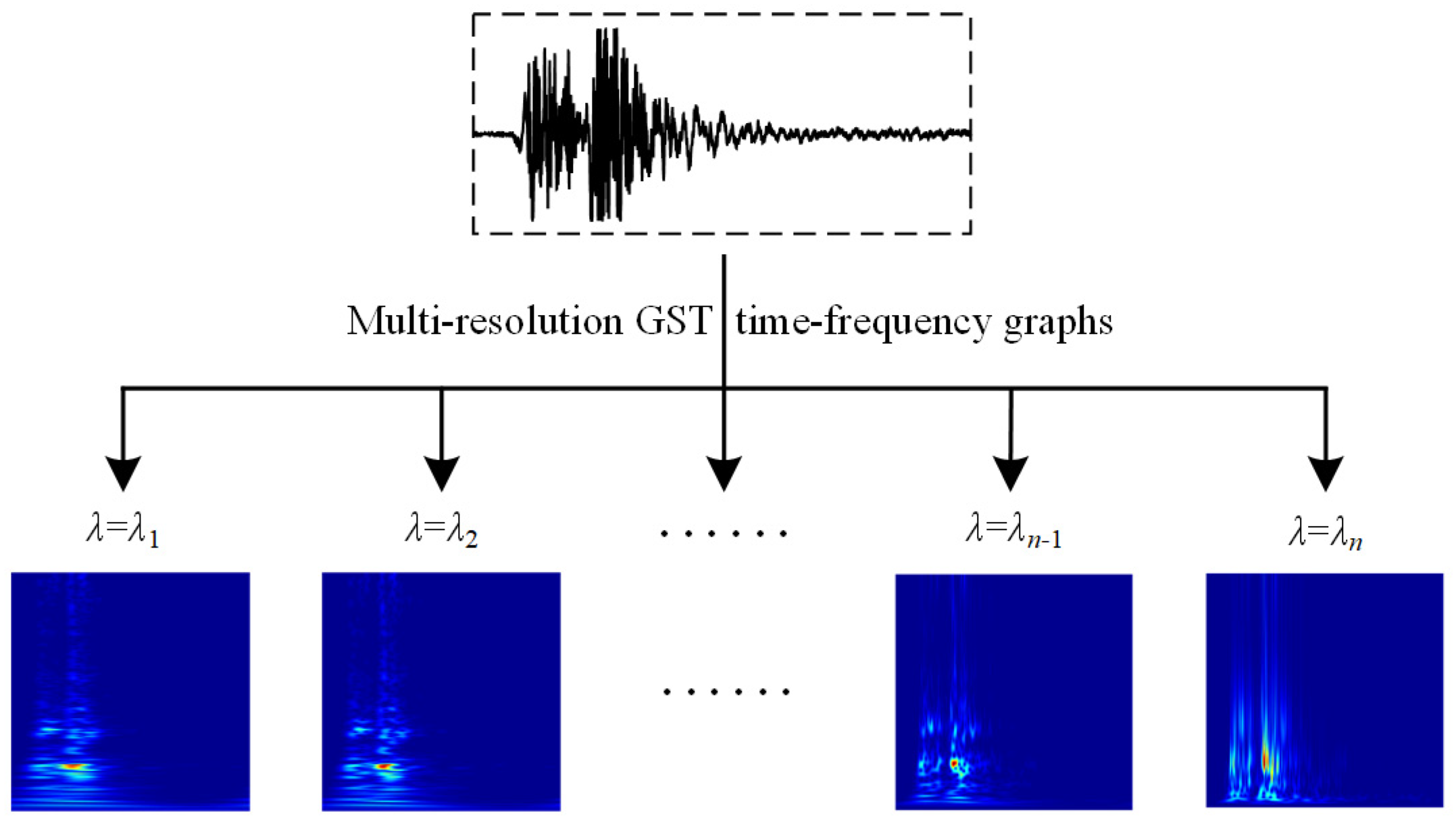
- A data augmentation technique using multiple-resolution GST time-frequency graphs can fully extract the signal features of each frequency band.
- (2)
- The OTSU algorithm is combined to crop key feature areas of the time-frequency graphs, removing redundant background pixels to improve training efficiency.
- (3)
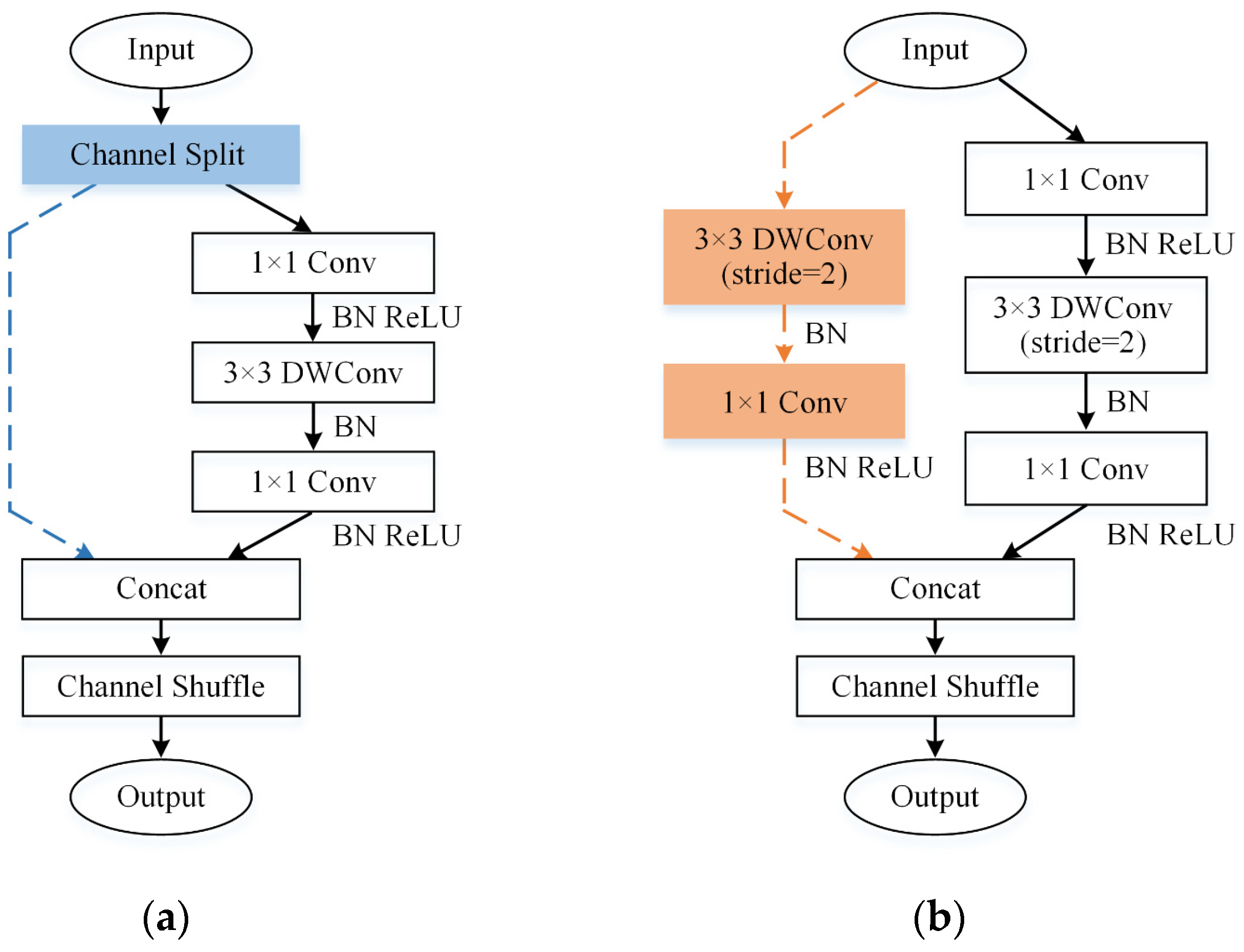
- The ShuffleNetV2 network is employed to construct the fault diagnosis model. The recognition accuracy and the training time are improved due to its lightweight network architecture.
2. Time-Frequency Graph of Vibration Signal
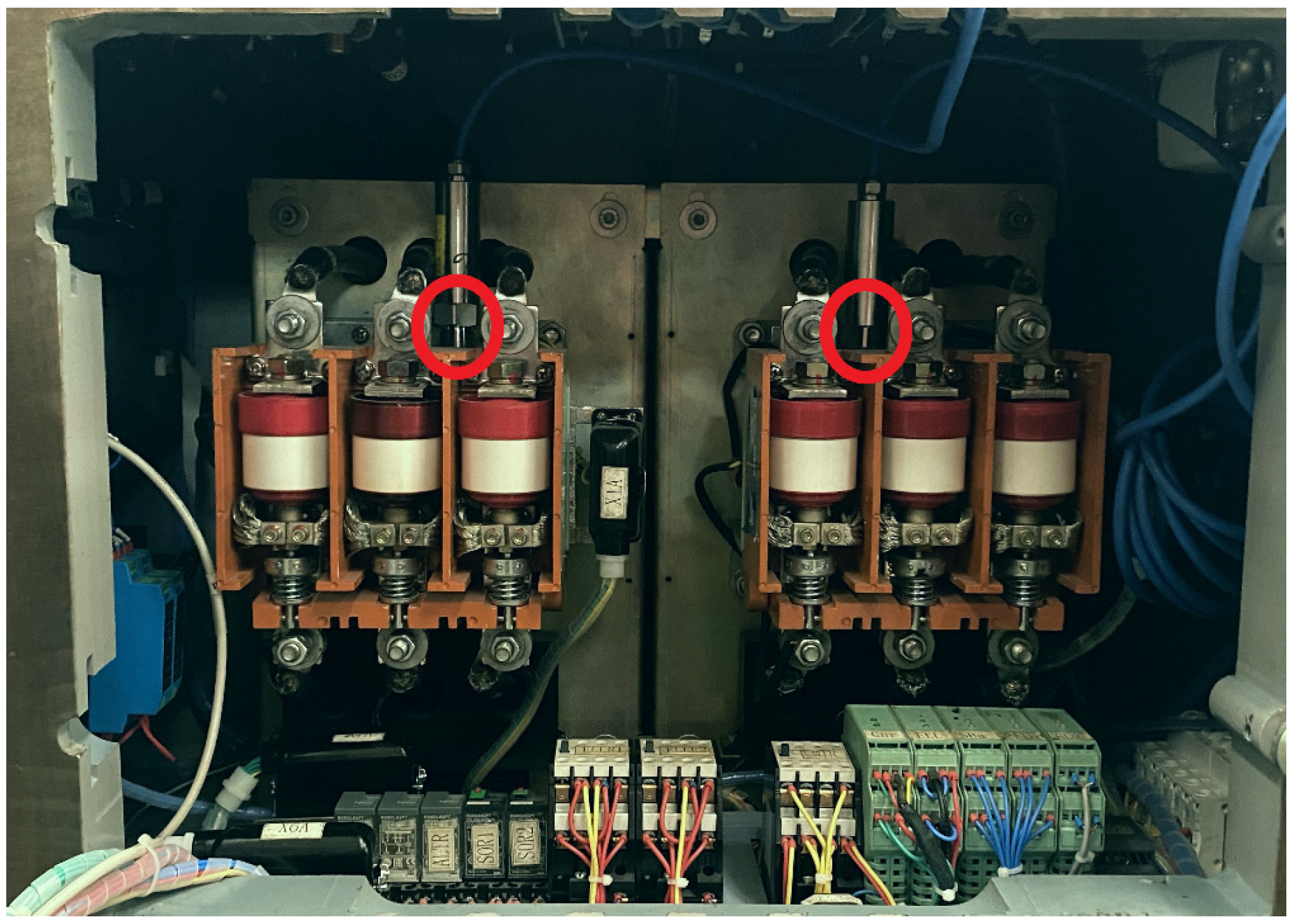
2.1. Vibration Signal Acquisition
- (1)
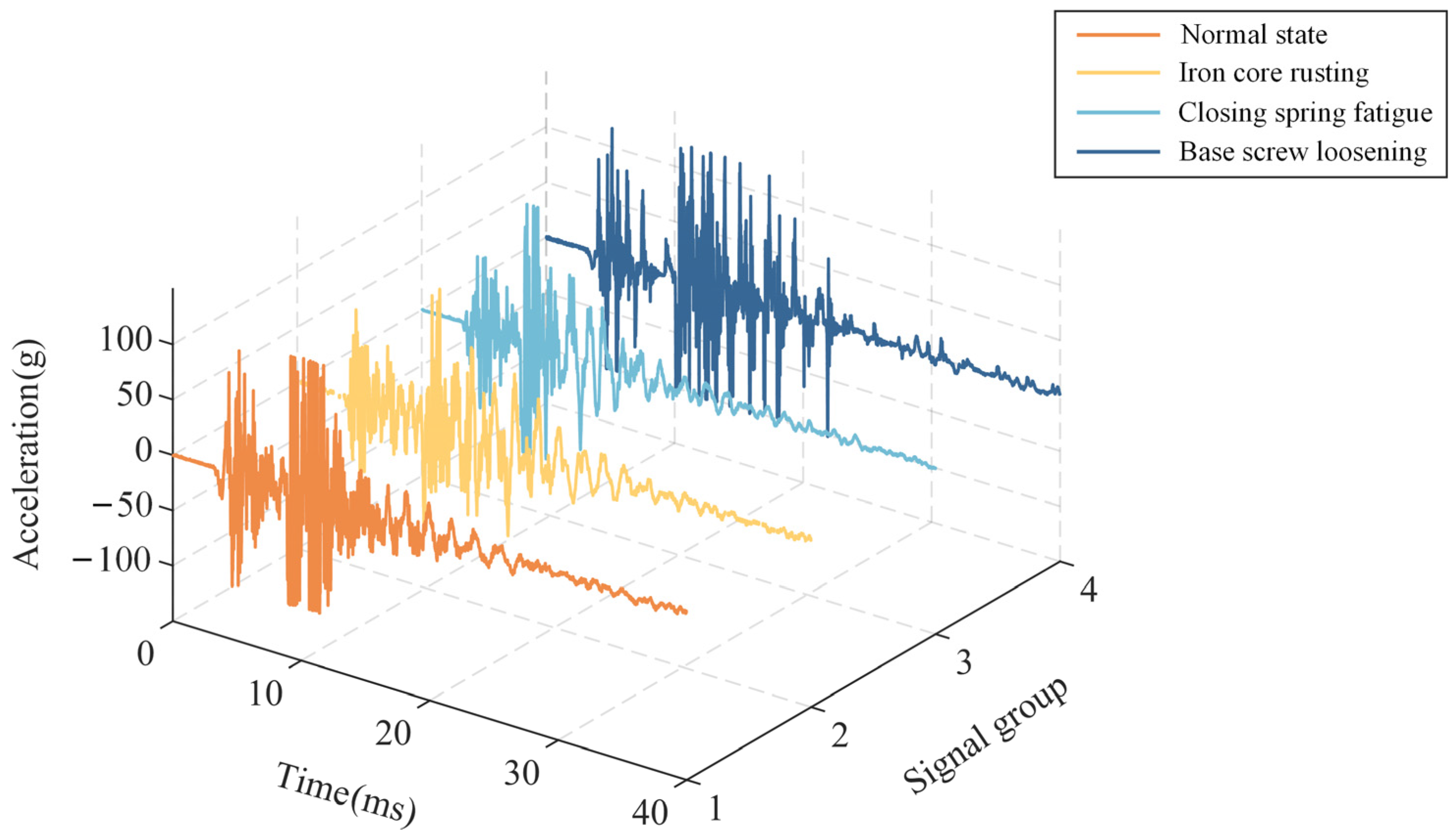
- Normal state: The high-energy vibration is induced by the energized core and the closing main contacts, resulting in the primary and secondary peak. The signal energy gradually diminishes 20 ms later.
- (2)
- Iron core rusting fault: When this fault occurs, rust and debris increase resistance to movement, weakening the vibration signal energy. The amplitudes in the primary peak and secondary peak are slightly lower than those in the normal state.
- (3)
- Closing spring fatigue fault: When this fault occurs, the mechanical properties of the spring degrade and its elasticity declines. Compared with the core rusting fault and normal state, the closing action is easier to approach stability. Therefore, the vibration occurs earlier, and the primary peak is short.
- (4)
- Base screw loosening fault: the system’s damping diminishes in this case, which leads to an increase in the primary peak and secondary peak, consuming longer time for the signal to decay.
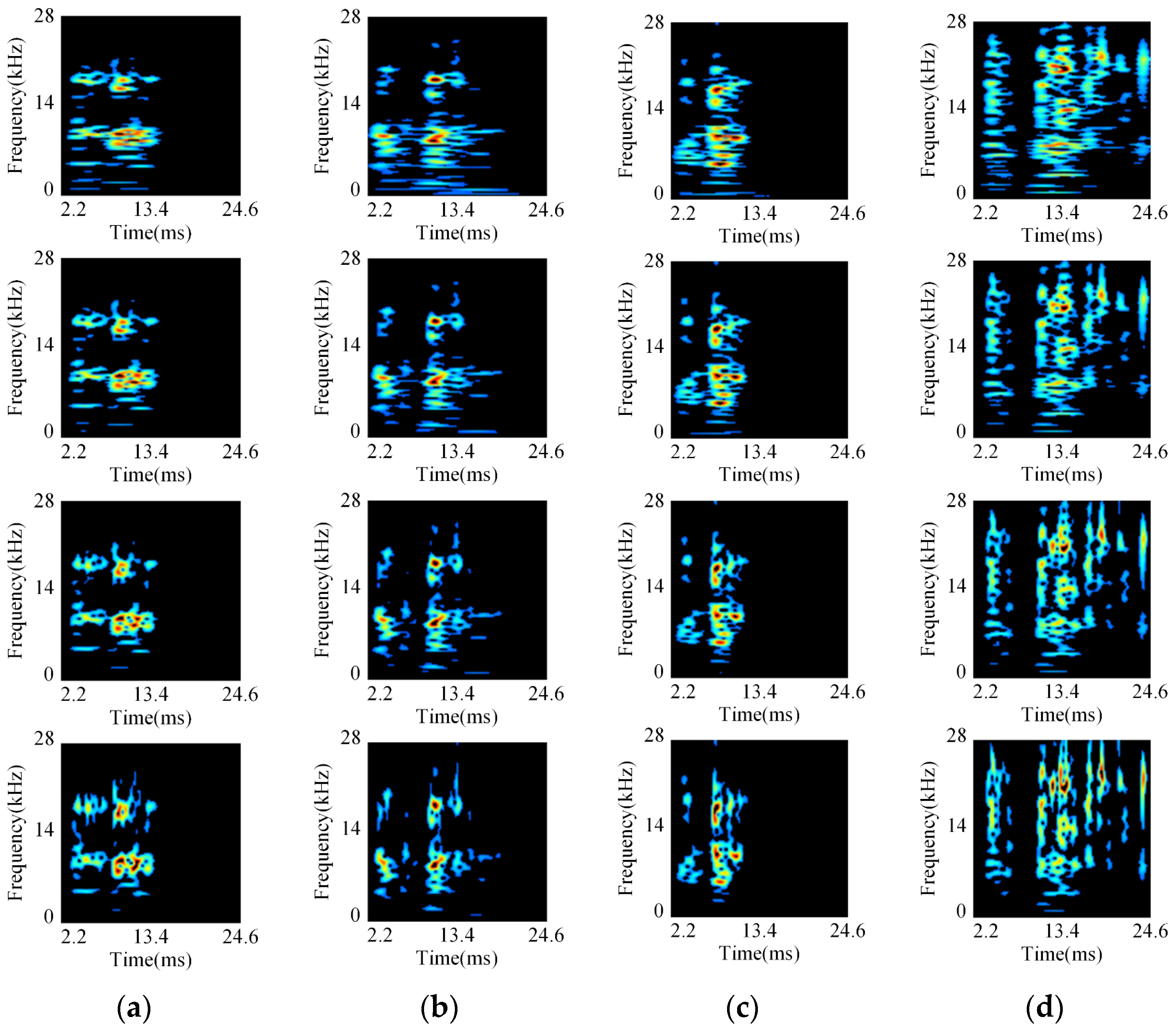
2.2. GST Time-Frequency Graph
3. Time-Frequency Graph Optimization Technique
3.1. Data Augmentation of Time-Frequency Graph
3.2. Cropping Optimization of Time-Frequency Graph
4. ShuffleNetV2 Fault Diagnosis
4.1. Principles of ShuffleNetV2 Network
4.2. ShuffleNetV2 Fault Diagnosis Framework
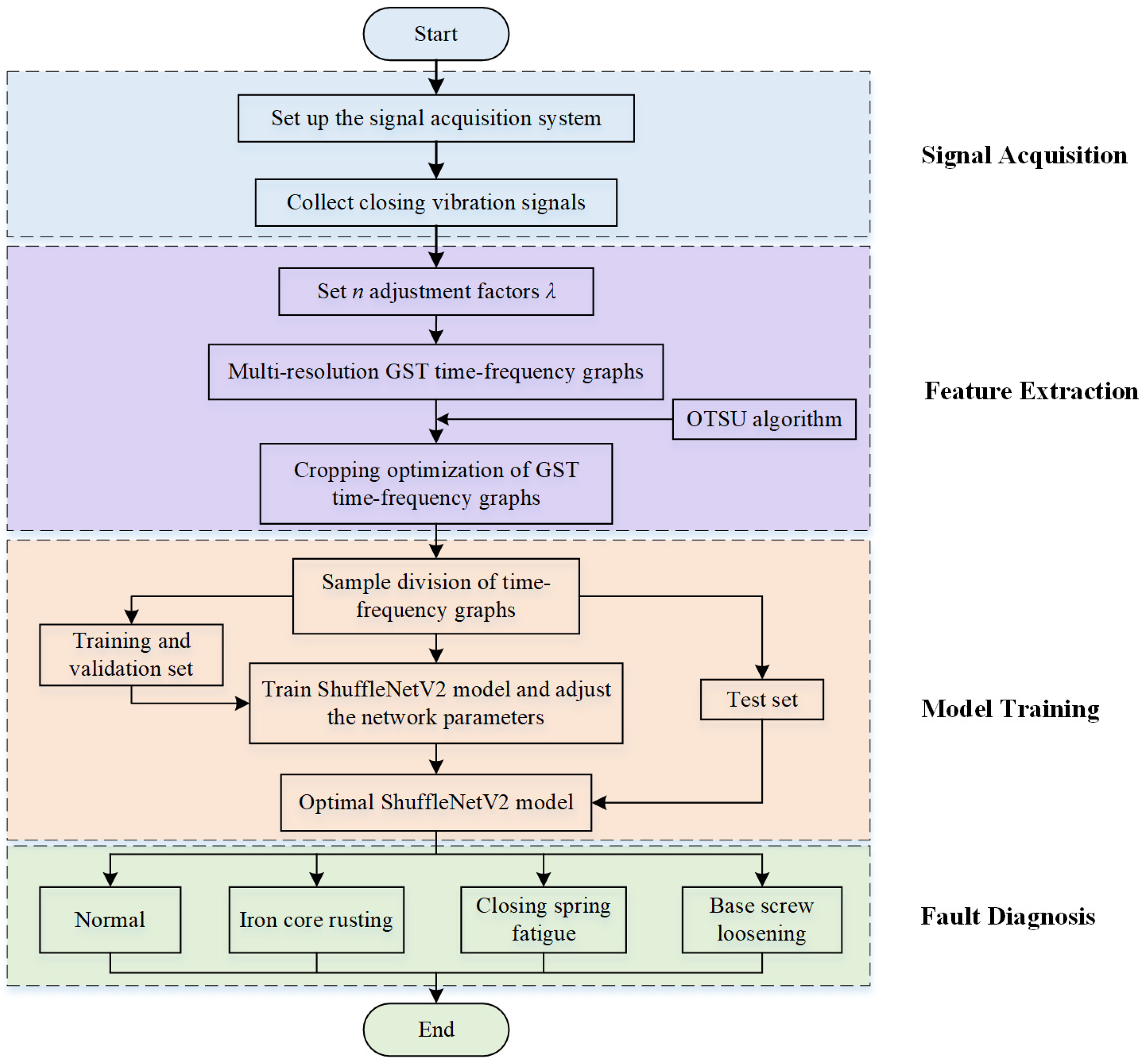
- (1)
- Signal acquisition: A signal acquisition system is constructed according to the vacuum contactor fault simulation plan. Acceleration sensors are used to capture vibration signals during different states when the vacuum contactors close.
- (2)
- Feature extraction: A series of multi-resolution GST time-frequency graphs of vibration signals are generated by combining Gaussian window width adjustment factors. The OTSU algorithm is employed to crop energy-concentrated regions from the GST time-frequency graphs.
- (3)
- Model training: The optimized GST time-frequency graphs are partitioned into training, validation, and test sets. Model parameters are optimized, and the optimal ShuffleNetV2 model is obtained.
- (4)
- Fault diagnosis: the optimal ShuffleNetV2 model is utilized to classify fault categories and output diagnostic outcomes.
5. Example Analysis
5.1. Time-Frequency Graph Dataset
5.2. Optimization Results of Time-Frequency Graph
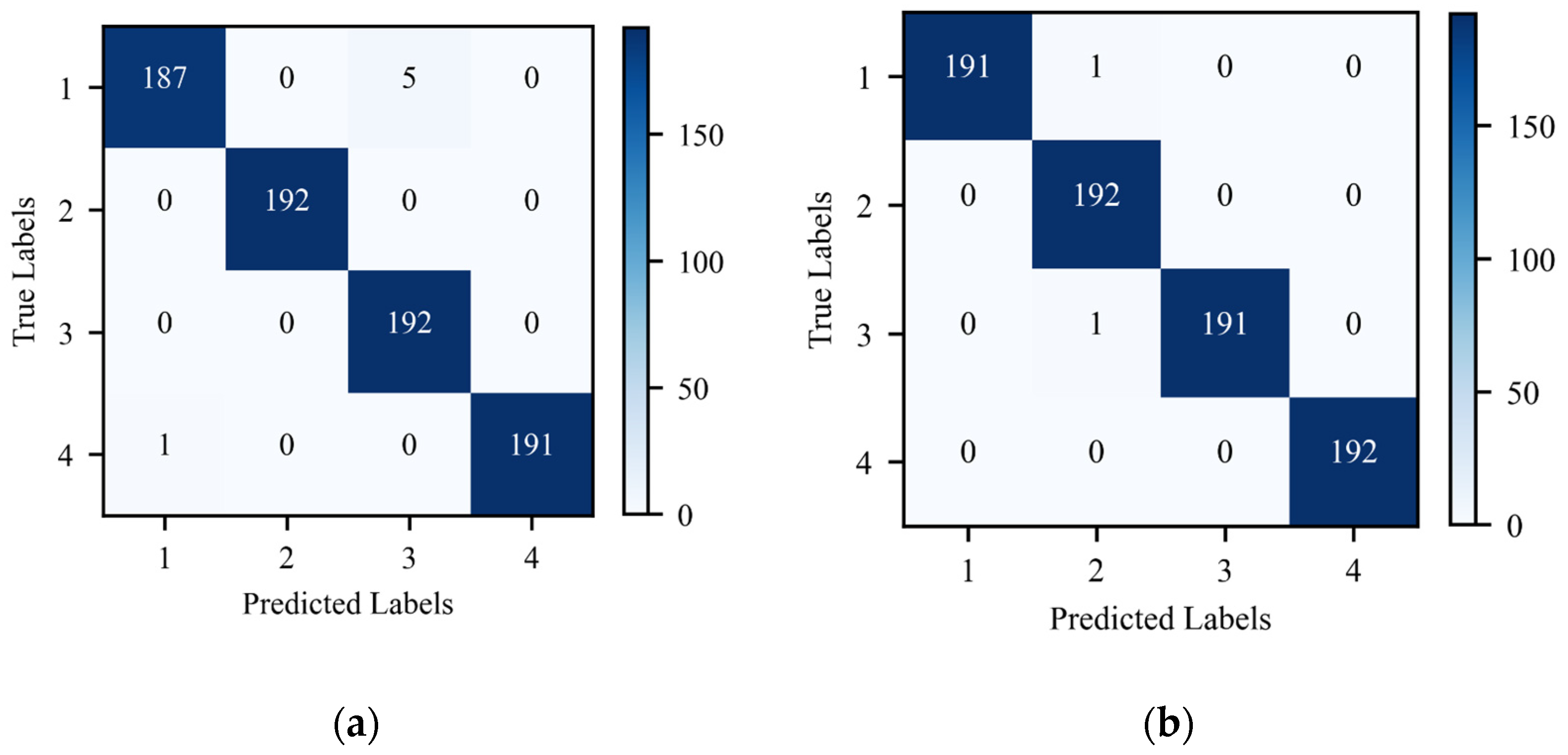
5.3. Performance Analysis of the Proposed Method
5.4. Comparison of Different Network Structures
6. Conclusions
- (1)
- GST introduces the Gaussian window width adjustment factor to generate multiple-resolution GST time-frequency graphs. This data augmentation technique ensures the extraction of overall time-frequency features of vibration signals, increases the diversity of the training dataset, and mitigates overfitting issues.
- (2)
- The OTSU algorithm crops the energy concentration area of the GST time-frequency graphs. This process reduces 68.86% of redundant background pixels in these graphs. Therefore, the effective feature information of the critical frequency bands is kept, and size optimization is achieved simultaneously.
- (3)
- A comparison is made between the AlexNet, ResNet50, ResNeXt50, and ShuffleNetV2 networks. ShuffleNetV2 can achieve the highest mean accuracy of 99.74%, and the single iteration time of model training is reduced by 19.42%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BN | Batch Normalization |
| BPNN | Back Propagation Neural Network |
| Conv modules | Convolutional modules |
| CWT | Continuous Wavelet Transform |
| DWConv | Depth-Wise Convolution |
| FC layer | Fully Connected layer |
| GST | Generalized Stockwell Transform |
| RF | Random Forest |
| SSIM | Structural Similarity Index Measure |
| ST | Stockwell Transform |
| STFT | Short-Time Fourier Transform |
| SVM | Support Vector Machine |
References
- Aghahadi, M.; Bosisio, A.; Merlo, M.; Berizzi, A.; Pegoiani, A.; Forciniti, S. Digitalization Processes in Distribution Grids: A Comprehensive Review of Strategies and Challenges. Appl. Sci. 2024, 14, 4528. [Google Scholar] [CrossRef]
- Liu, B.; Tan, Z.; Lan, C. Key Concepts and Framework of Power Distribution and Utilization of Transparent Power Grids. Front. Energy Res. 2022, 10, 890. [Google Scholar] [CrossRef]
- Wu, Z.; Fang, C.; Wu, G.; Lin, Z.; Chen, W. A CNN-Regression-Based Contact Erosion Measurement Method for AC Contactors. IEEE Trans. Instrum. Meas. 2022, 71, 3518410. [Google Scholar] [CrossRef]
- Chen, H.; Han, C.; Zhang, Y.; Ma, Z.; Zhang, H.; Yuan, Z. Investigation on the Fault Monitoring of High-Voltage Circuit Breaker Using Improved Deep Learning. PLoS ONE 2023, 18, e0295278. [Google Scholar] [CrossRef] [PubMed]
- Altaf, M.; Akram, T.; Khan, M.A.; Iqbal, M.; Ch, M.M.I.; Hsu, C.-H. A New Statistical Features Based Approach for Bearing Fault Diagnosis Using Vibration Signals. Sensors 2022, 22, 2012. [Google Scholar] [CrossRef]
- Prieto, M.D.; Cirrincione, G.; Espinosa, A.G.; Ortega, J.A.; Henao, H. Bearing Fault Detection by a Novel Condition-Monitoring Scheme Based on Statistical-Time Features and Neural Networks. IEEE Trans. Ind. Electron. 2013, 60, 3398–3407. [Google Scholar] [CrossRef]
- Jiang, L.; Yin, H.; Li, X.; Tang, S. Fault Diagnosis of Rotating Machinery Based on Multisensor Information Fusion Using SVM and Time-Domain Features. Shock Vib. 2014, 2014, 418178. [Google Scholar] [CrossRef]
- Qi, J.; Gao, X.; Huang, N. Mechanical Fault Diagnosis of a High Voltage Circuit Breaker Based on High-Efficiency Time-Domain Feature Extraction with Entropy Features. Entropy 2020, 22, 478. [Google Scholar] [CrossRef]
- Chen, F.; Cheng, M.; Tang, B.; Xiao, W.; Chen, B.; Shi, X. A Novel Optimized Multi-Kernel Relevance Vector Machine with Selected Sensitive Features and Its Application in Early Fault Diagnosis for Rolling Bearings. Measurement 2020, 156, 107583. [Google Scholar] [CrossRef]
- Bao, W.; Tu, X.; Hu, Y.; Li, F. Envelope Spectrum L-Kurtosis and Its Application for Fault Detection of Rolling Element Bearings. IEEE Trans. Instrum. Meas. 2020, 69, 1993–2002. [Google Scholar] [CrossRef]
- Gong, W.; Li, A.; Wu, Z.; Qin, F. Nonlinear Vibration Feature Extraction Based on Power Spectrum Envelope Adaptive Empirical Fourier Decomposition. ISA Trans. 2023, 139, 660–674. [Google Scholar] [CrossRef] [PubMed]
- Jiang, F.; Ding, K.; He, G.; Du, C. Sparse Dictionary Design Based on Edited Cepstrum and Its Application in Rolling Bearing Fault Diagnosis. J. Sound Vib. 2021, 490, 115704. [Google Scholar] [CrossRef]
- Vamsi, I.; Sabareesh, G.R.; Penumakala, P.K. Comparison of Condition Monitoring Techniques in Assessing Fault Severity for a Wind Turbine Gearbox under Non-Stationary Loading. Mech. Syst. Signal Process. 2019, 124, 1–20. [Google Scholar] [CrossRef]
- Liang, G.; Song, X.; Liao, Z.; Jia, B. Optimal Time Frequency Fusion Symmetric Dot Pattern Bearing Fault Feature Enhancement and Diagnosis. Sensors 2024, 24, 4186. [Google Scholar] [CrossRef]
- Tao, H.; Wang, P.; Chen, Y.; Stojanovic, V.; Yang, H. An Unsupervised Fault Diagnosis Method for Rolling Bearing Using STFT and Generative Neural Networks. J. Frankl. Inst. 2020, 357, 7286–7307. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, T.; Li, Q.; Wang, J.; Zhang, W.; Wen, Z.; Tang, Y. Fault Diagnosis of Conventional Circuit Breaker Contact System Based on Time–Frequency Analysis and Improved AlexNet. IEEE Trans. Instrum. Meas. 2021, 70, 3508512. [Google Scholar] [CrossRef]
- Yan, R.; Lin, C.; Gao, S.; Luo, J.; Li, T.; Xia, Z. Fault Diagnosis and Analysis of Circuit Breaker Based on Wavelet Time-Frequency Representations and Convolution Neural Network. J. Vib. Shock 2020, 39, 198–205. [Google Scholar] [CrossRef]
- Li, L.; Xiao, J.; Wu, B.; Zhou, M.; Wang, Q. Online Monitoring and Diagnosis of High Voltage Circuit Breaker Faults: Feature Extraction Analysis of Vibration Signals. Int. J. Metrol. Qual. Eng. 2019, 10, 13. [Google Scholar] [CrossRef]
- Zhao, S.; Ma, L.; Zhu, J.; Li, J.; Zhao, H. Mechanical Fault Diagnosis of High Voltage Circuit Breaker Based on CEEMDAN Sample Entropy and FWA-SVM. Electr. Power Autom. Equip. 2020, 40, 181–186. [Google Scholar] [CrossRef]
- Esam El-Dine Atta, M.; Ibrahim, D.K.; Gilany, M.I. Broken Bar Faults Detection Under Induction Motor Starting Conditions Using the Optimized Stockwell Transform and Adaptive Time–Frequency Filter. IEEE Trans. Instrum. Meas. 2021, 70, 3518110. [Google Scholar] [CrossRef]
- Zaman, W.; Ahmad, Z.; Siddique, M.F.; Ullah, N.; Kim, J.-M. Centrifugal Pump Fault Diagnosis Based on a Novel SobelEdge Scalogram and CNN. Sensors 2023, 23, 5255. [Google Scholar] [CrossRef] [PubMed]
- Yuan, P.; Zhang, J.; Feng, J.; Wang, H.; Ren, W.; Wang, C. An Improved Time-Frequency Analysis Method for Structural Instantaneous Frequency Identification Based on Generalized S-Transform and Synchroextracting Transform. Eng. Struct. 2022, 252, 113657. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, H.; Sun, Z.; Dong, W.; Dong, Y. Fault Diagnosis of Wind Turbine Power Converter Considering Wavelet Transform, Feature Analysis, Judgment and BP Neural Network. IEEE Access 2019, 7, 179799–179809. [Google Scholar] [CrossRef]
- Du, C.; Gao, S.; Jia, N.; Kong, D.; Jiang, J.; Tian, G.; Su, Y.; Wang, Q.; Li, C. A High-Accuracy Least-Time-Domain Mixture Features Machine-Fault Diagnosis Based on Wireless Sensor Network. IEEE Syst. J. 2020, 14, 4101–4109. [Google Scholar] [CrossRef]
- Miao, D. Research on Fault Diagnosis of High-Voltage Circuit Breaker Based on Support Vector Machine. Int. J. Pattern Recognit. Artif. Intell. 2019, 33, 1959019. [Google Scholar] [CrossRef]
- Hu, Q.; Si, X.; Zhang, Q.; Qin, A. A Rotating Machinery Fault Diagnosis Method Based on Multi-Scale Dimensionless Indicators and Random Forests. Mech. Syst. Signal Process. 2020, 139, 106609. [Google Scholar] [CrossRef]
- Liu, A.; Yang, Z.; Li, H.; Wang, C.; Liu, X. Intelligent Diagnosis of Rolling Element Bearing Based on Refined Composite Multiscale Reverse Dispersion Entropy and Random Forest. Sensors 2022, 22, 2046. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1492–1500. [Google Scholar]
- Khan, M.M.; Uddin, M.S.; Parvez, M.Z.; Nahar, L. A Squeeze and Excitation ResNeXt-Based Deep Learning Model for Bangla Handwritten Compound Character Recognition. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 3356–3364. [Google Scholar] [CrossRef]
- Chen, L.; Li, S.; Bai, Q.; Yang, J.; Jiang, S.; Miao, Y. Review of Image Classification Algorithms Based on Convolutional Neural Networks. Remote Sens. 2021, 13, 4712. [Google Scholar] [CrossRef]
- Ma, N.; Zhang, X.; Zheng, H.-T.; Sun, J. ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design. In Proceedings of the COMPUTER VISION—ECCV 2018, PT XIV, Munich, Germany, 8–14 September 2018; Springer International Publishing Ag: Cham, Switzerland, 2018; Volume 11218, pp. 122–138. [Google Scholar]
- Wang, W.; Guo, S.; Zhao, S.; Lu, Z.; Xing, Z.; Jing, Z.; Wei, Z.; Wang, Y. Intelligent Fault Diagnosis Method Based on VMD-Hilbert Spectrum and ShuffleNet-V2: Application to the Gears in a Mine Scraper Conveyor Gearbox. Sensors 2023, 23, 4951. [Google Scholar] [CrossRef] [PubMed]
- CKJ5-400/1.14 AC Vacuum Contactor. Available online: https://dc-components.com/product/glvac-ckj5-400-1-14kv-ac-vacuum-contactor (accessed on 16 September 2024).
- Chen, X.; Feng, D.; Lin, S. Mechanical Fault Diagnosis Method of High Voltage Circuit Breaker Operating Mechanism Based on Deep Auto-Encoder Network. High Volt. Eng. 2020, 46, 3080–3088. [Google Scholar] [CrossRef]
- Cui, R.; Tong, D.; Li, Z. Aviation Arc Fault Detection Based on Generalized S Transform. Proc. Chin. Soc. Electr. Eng. 2021, 41, 8241–8249. [Google Scholar] [CrossRef]
- Peng, Y.; Ma, X. A Fault Diagnosis Method of Rolling Bearings Based on Parameter Optimization and Adaptive Generalized S-Transform. Machines 2022, 10, 207. [Google Scholar] [CrossRef]
- Lopez-Ramirez, M.; Ledesma-Carrillo, L.M.; Garcia-Guevara, F.M.; Munoz-Minjares, J.; Cabal-Yepez, E.; Villalobos-Pina, F.J. Automatic Early Broken-Rotor-Bar Detection and Classification Using Otsu Segmentation. IEEE Access 2020, 8, 112624–112632. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, J.; Sun, Q.; Zhao, Y.; Liu, T. ShuffleNet-Based Comprehensive Diagnosis for Insulation and Mechanical Faults of Power Equipment. High Volt. 2021, 6, 861–872. [Google Scholar] [CrossRef]
- Yang, H.; Liu, J.; Mei, G.; Yang, D.; Deng, X.; Duan, C. Research on Real-Time Detection Method of Rail Corrugation Based on Improved ShuffleNet V2. Eng. Appl. Artif. Intell. 2023, 126, 106825. [Google Scholar] [CrossRef]
- Zhou, Y.; Cao, R.; Zhang, A.; Li, P. An Interference Mitigation Method for FMCW Radar Based on Time–Frequency Distribution and Dual-Domain Fusion Filtering. Sensors 2024, 24, 3288. [Google Scholar] [CrossRef]






| Status Category | Analogue Method | Collection Period | Number of Acquisitions |
|---|---|---|---|
| Normal | —— | After industrial trials | 50 |
| The first overhaul | 40 | ||
| The second overhaul | 30 | ||
| Iron core rusting | A few iron filings added inside the core | After industrial trials | 50 |
| The first overhaul | 40 | ||
| The second overhaul | 30 | ||
| Closing spring fatigue | Spring pre-compression reduced by 3 mm | After industrial trials | 50 |
| The first overhaul | 40 | ||
| The second overhaul | 30 | ||
| Base screw loosening | Base screws screwed outwards 4 mm | After industrial trials | 50 |
| The first overhaul | 40 | ||
| The second overhaul | 30 |
| State | Label | Training Set Samples | Validation Set Samples | Test Set Samples |
|---|---|---|---|---|
| Normal | 1 | 576 | 192 | 192 |
| Iron core rusting | 2 | 576 | 192 | 192 |
| Closing spring fatigue | 3 | 576 | 192 | 192 |
| Base screw loosening | 4 | 576 | 192 | 192 |
| Model | Layer | Output Size | Kernel Size |
|---|---|---|---|
| ShuffleNetV2 fault diagnosis model | Input | 125 × 125 × 3 | |
| Conv1 | 63 × 63 × 24 | 3 × 3 | |
| MaxPool | 32 × 32 × 24 | 3 × 3 | |
| Stage2 | 16 × 16 × 116 | ||
| Stage3 | 8 × 8 × 232 | ||
| Stage4 | 4 × 4 × 464 | ||
| Conv5 | 4 × 4 × 1024 | 1 × 1 | |
| GlobalPool | 1024 | ||
| FC | 4 |
| Without Cropping Optimization | With Cropping Optimization | |
|---|---|---|
| Model training time (min) | 47.65 | 38.41 |
| Total recognition time of the test set (s) | 6.79 | 4.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, Q.; Song, J. Fault Diagnosis Method for Vacuum Contactor Based on Time-Frequency Graph Optimization Technique and ShuffleNetV2. Sensors 2024, 24, 6274. https://doi.org/10.3390/s24196274
Li H, Wang Q, Song J. Fault Diagnosis Method for Vacuum Contactor Based on Time-Frequency Graph Optimization Technique and ShuffleNetV2. Sensors. 2024; 24(19):6274. https://doi.org/10.3390/s24196274
Chicago/Turabian StyleLi, Haiying, Qinyang Wang, and Jiancheng Song. 2024. "Fault Diagnosis Method for Vacuum Contactor Based on Time-Frequency Graph Optimization Technique and ShuffleNetV2" Sensors 24, no. 19: 6274. https://doi.org/10.3390/s24196274
APA StyleLi, H., Wang, Q., & Song, J. (2024). Fault Diagnosis Method for Vacuum Contactor Based on Time-Frequency Graph Optimization Technique and ShuffleNetV2. Sensors, 24(19), 6274. https://doi.org/10.3390/s24196274