
Design of Differential Loudspeaker Line Array for Steerable Frequency-Invariant Beamforming


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
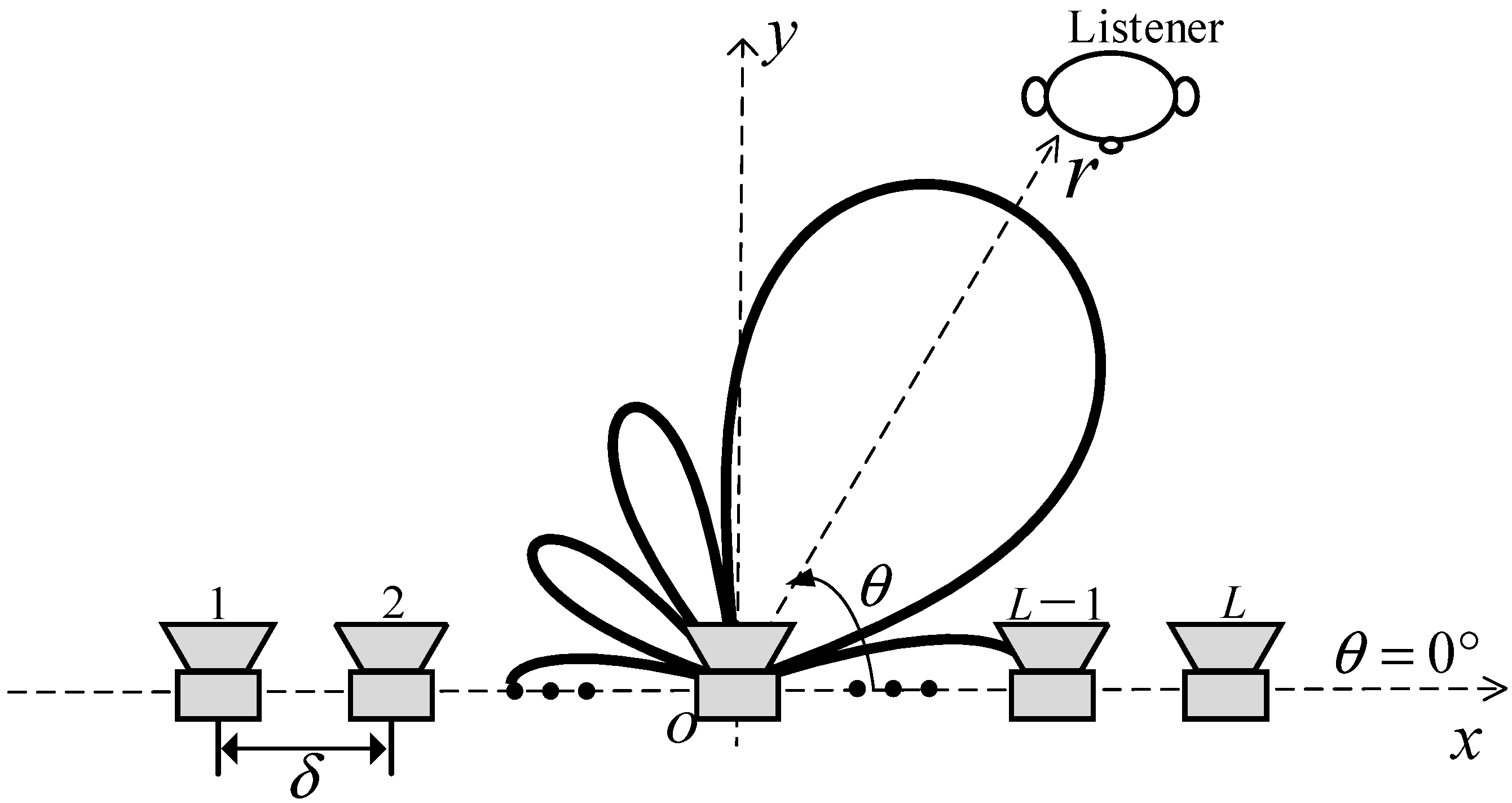
2. Problem Formulation
3. Methods
3.1. Target Radiation Pattern with the Main Lobe Steering
3.2. Formulating the Target Radiation Pattern in the Modal Domain
3.2.1. N Is Even
3.2.2. N Is Odd
3.3. Beamformer Design
3.3.1. Modal Matching Method with Maximum WNG
3.3.2. Modal Matching Method with WNG Constraint
| Algorithm 1 Steerable Frequency-Invariant Beamformer Design |
|
4. Simulations
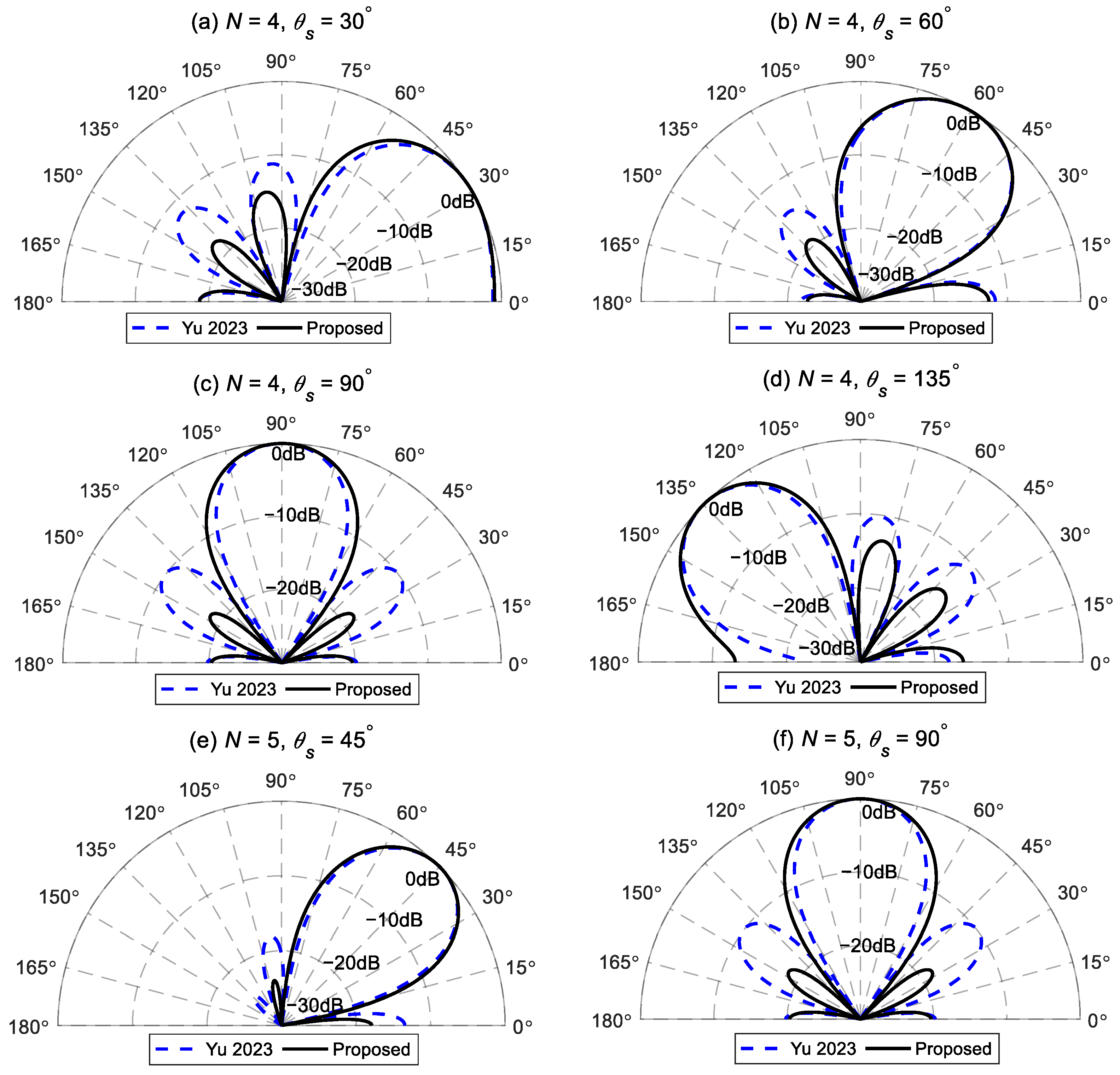
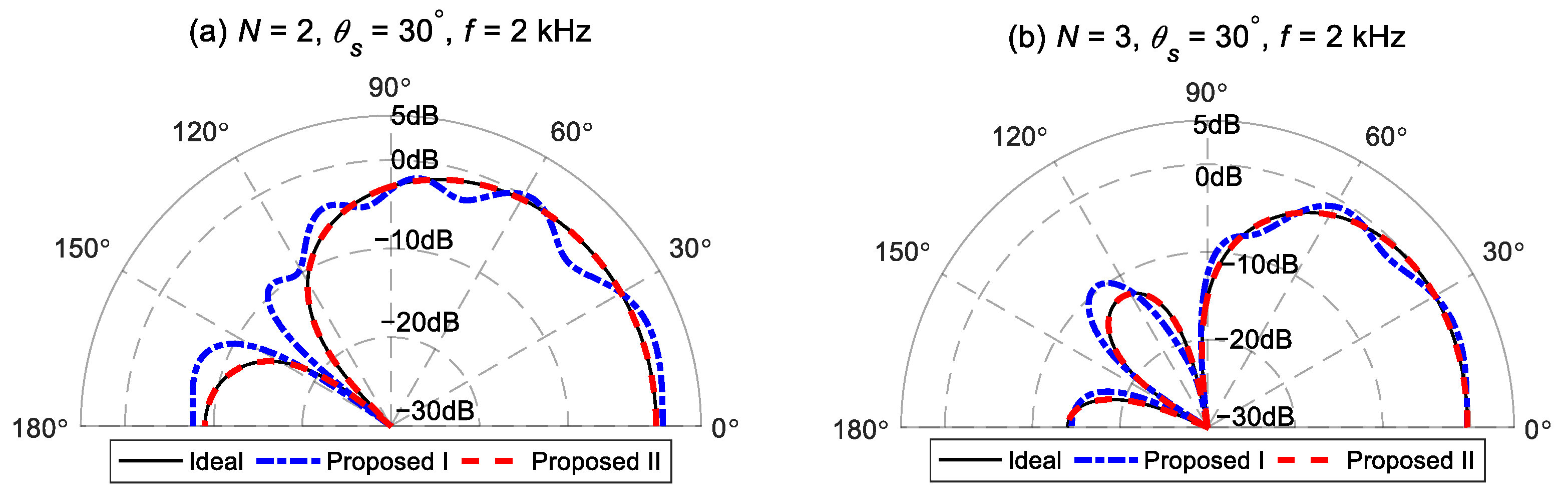
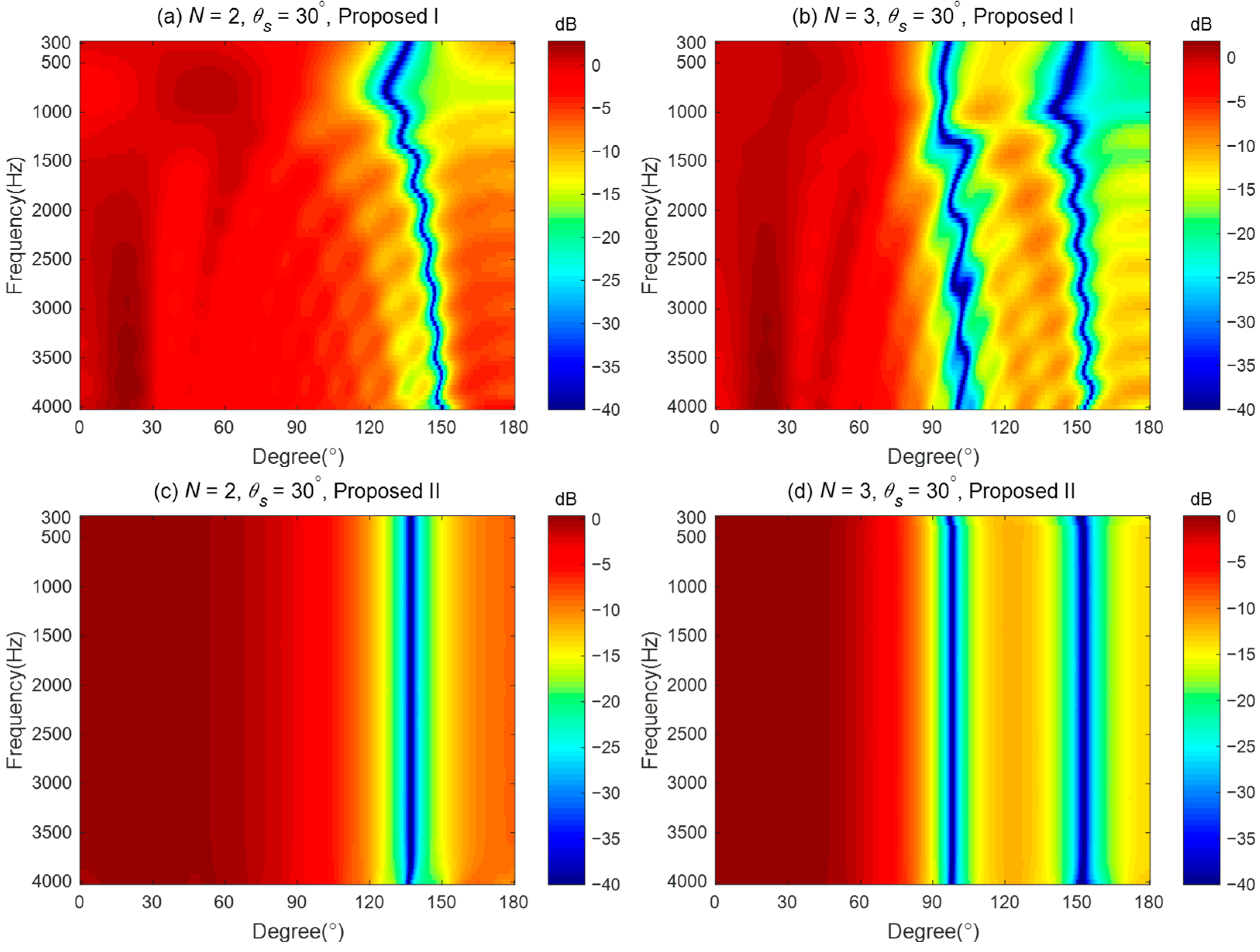
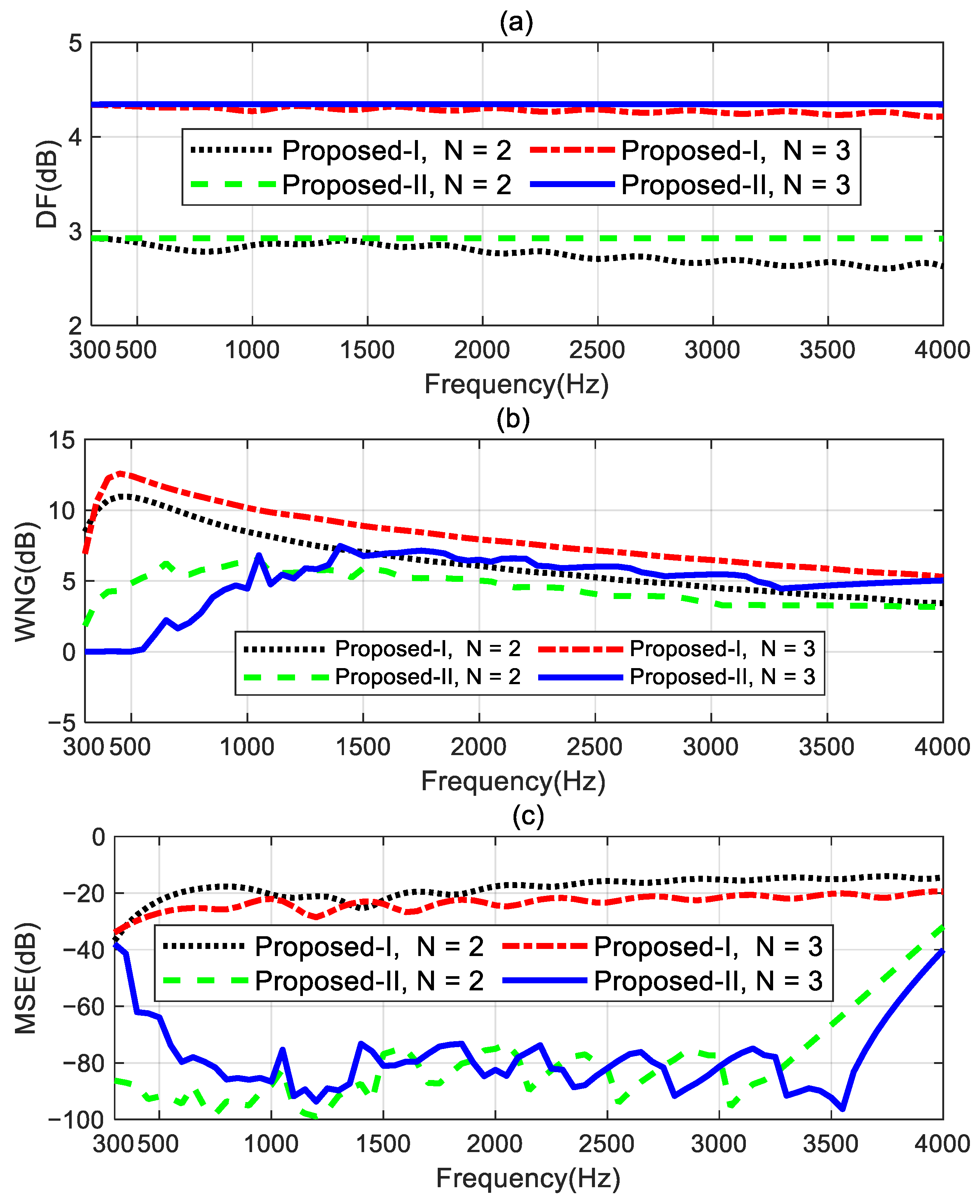
4.1. Performance Study and Comparison
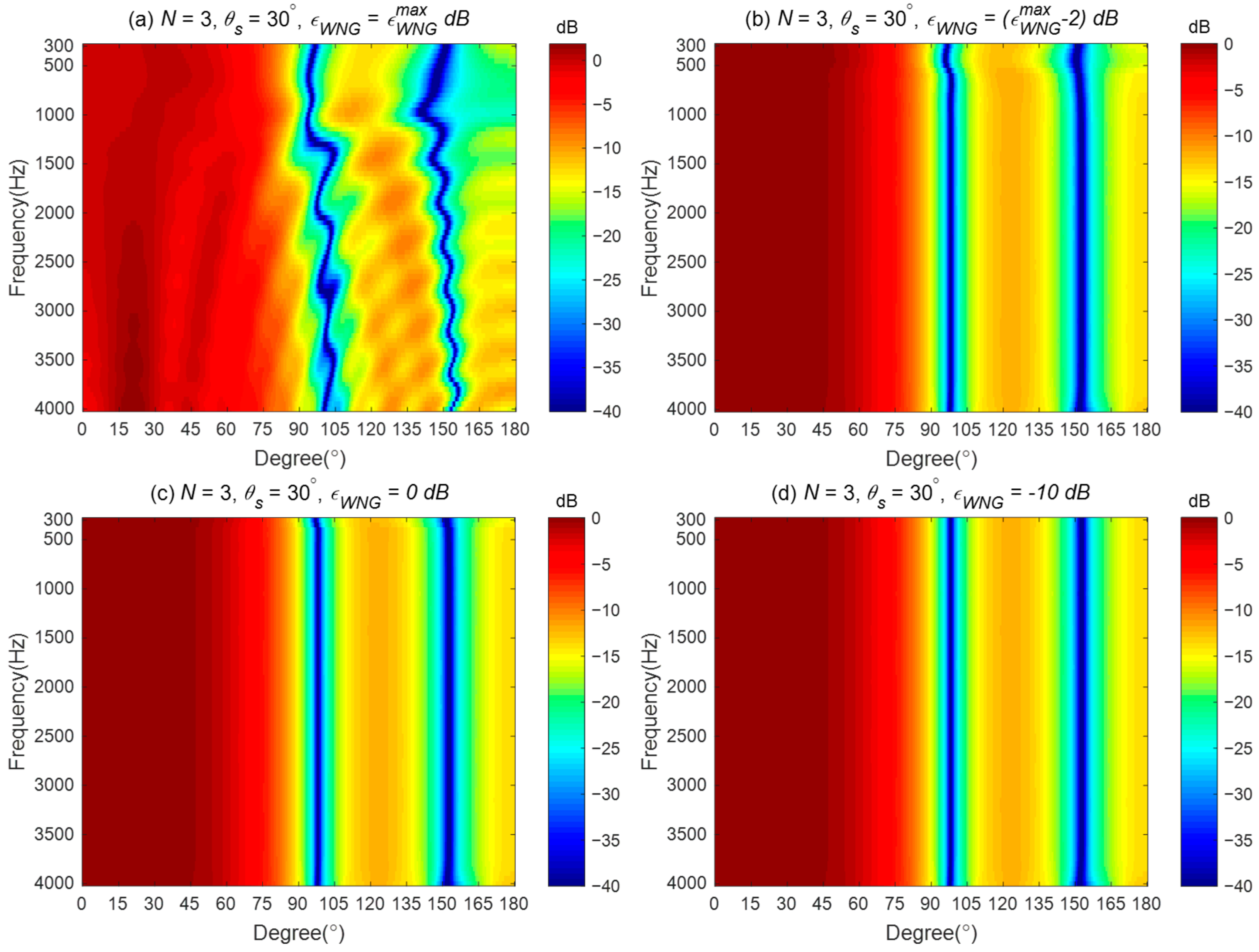
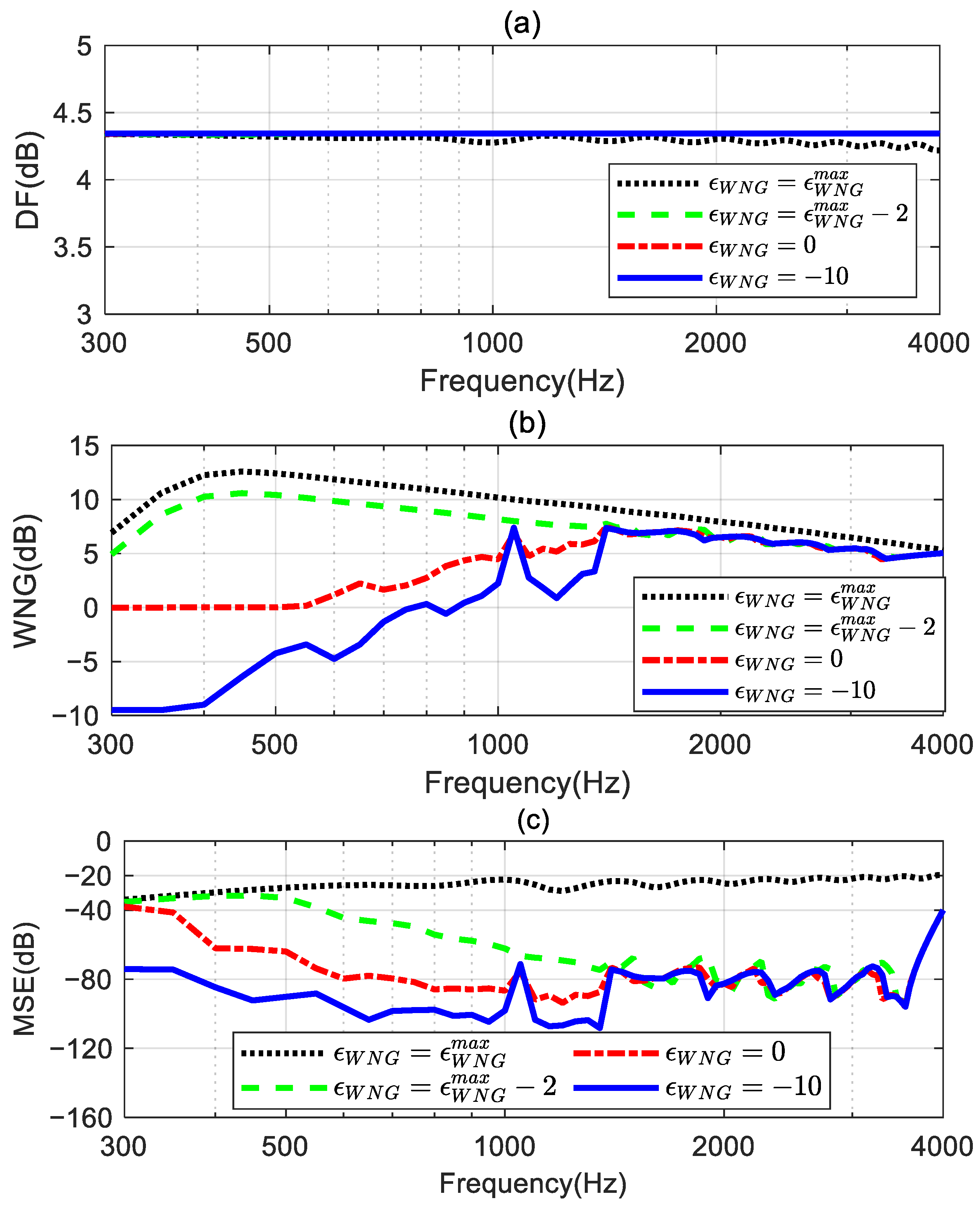
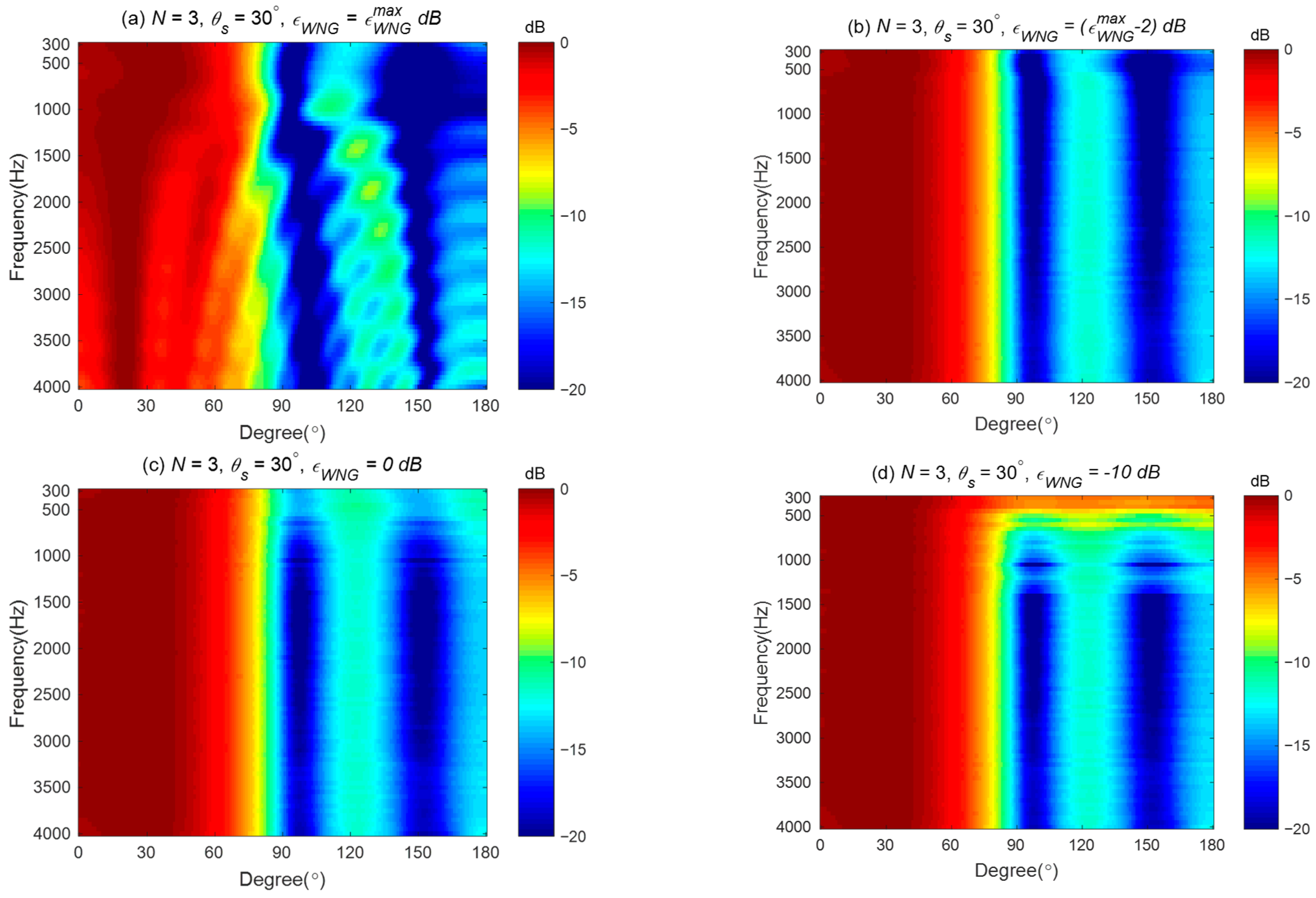
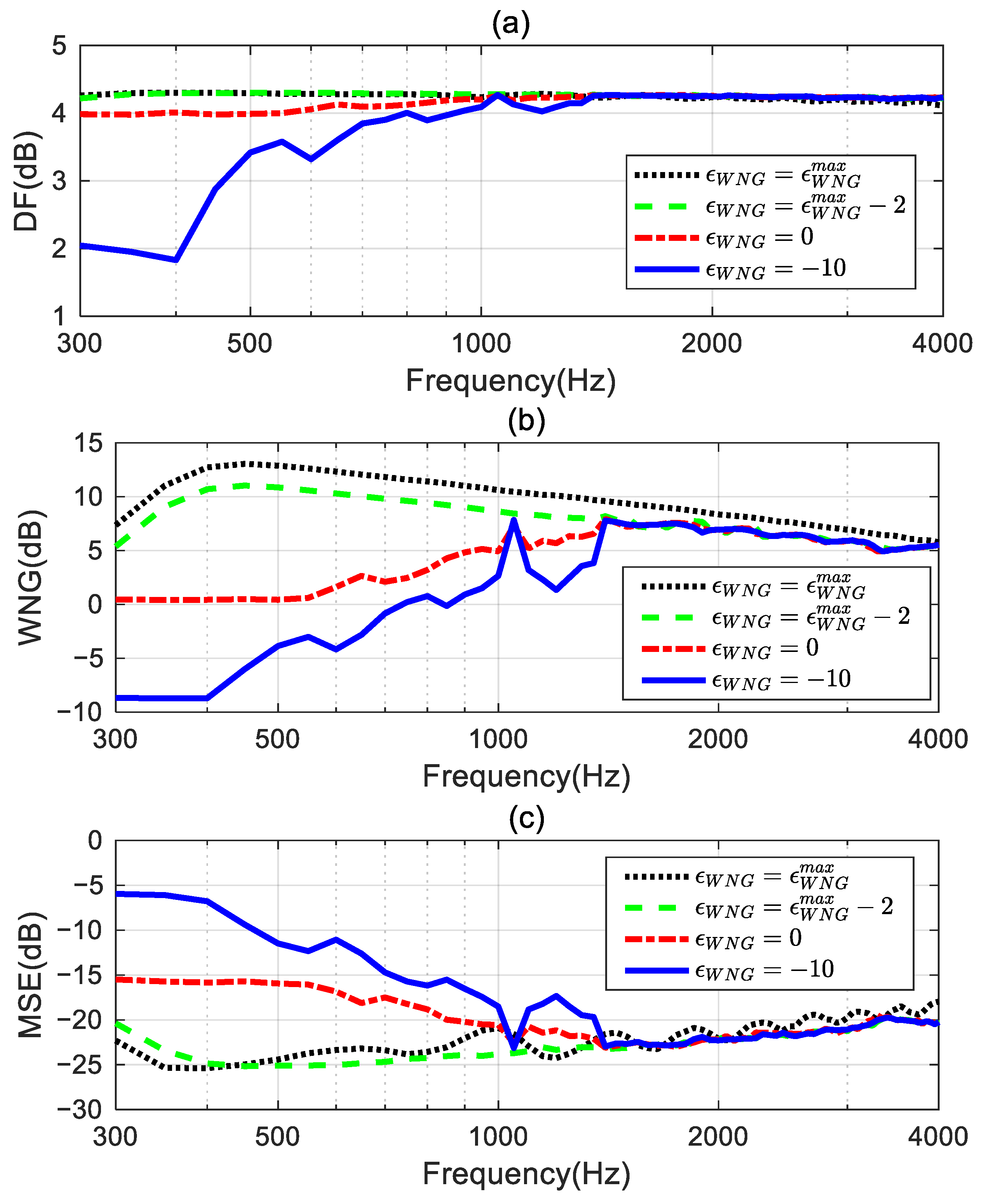
4.2. Impact of the Parameter
4.3. Impact of Loudspeaker Mismatch
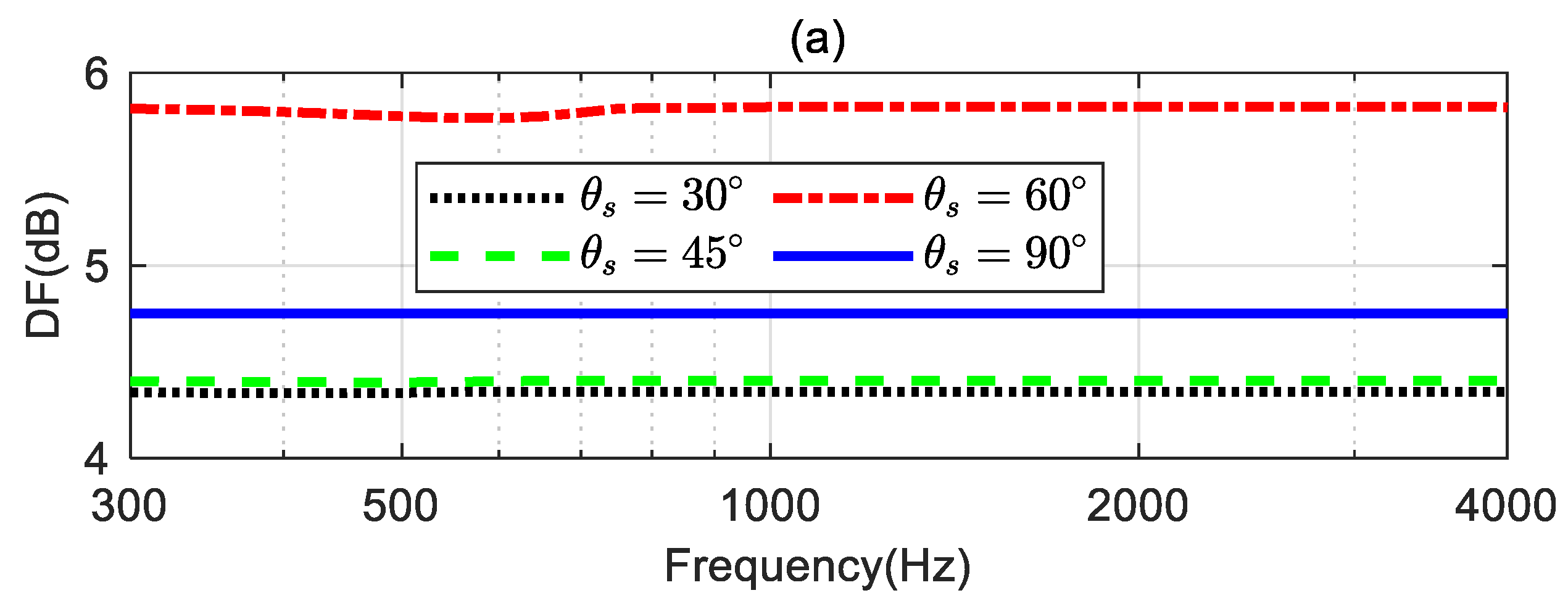
4.4. Validation of the Steering Flexibility
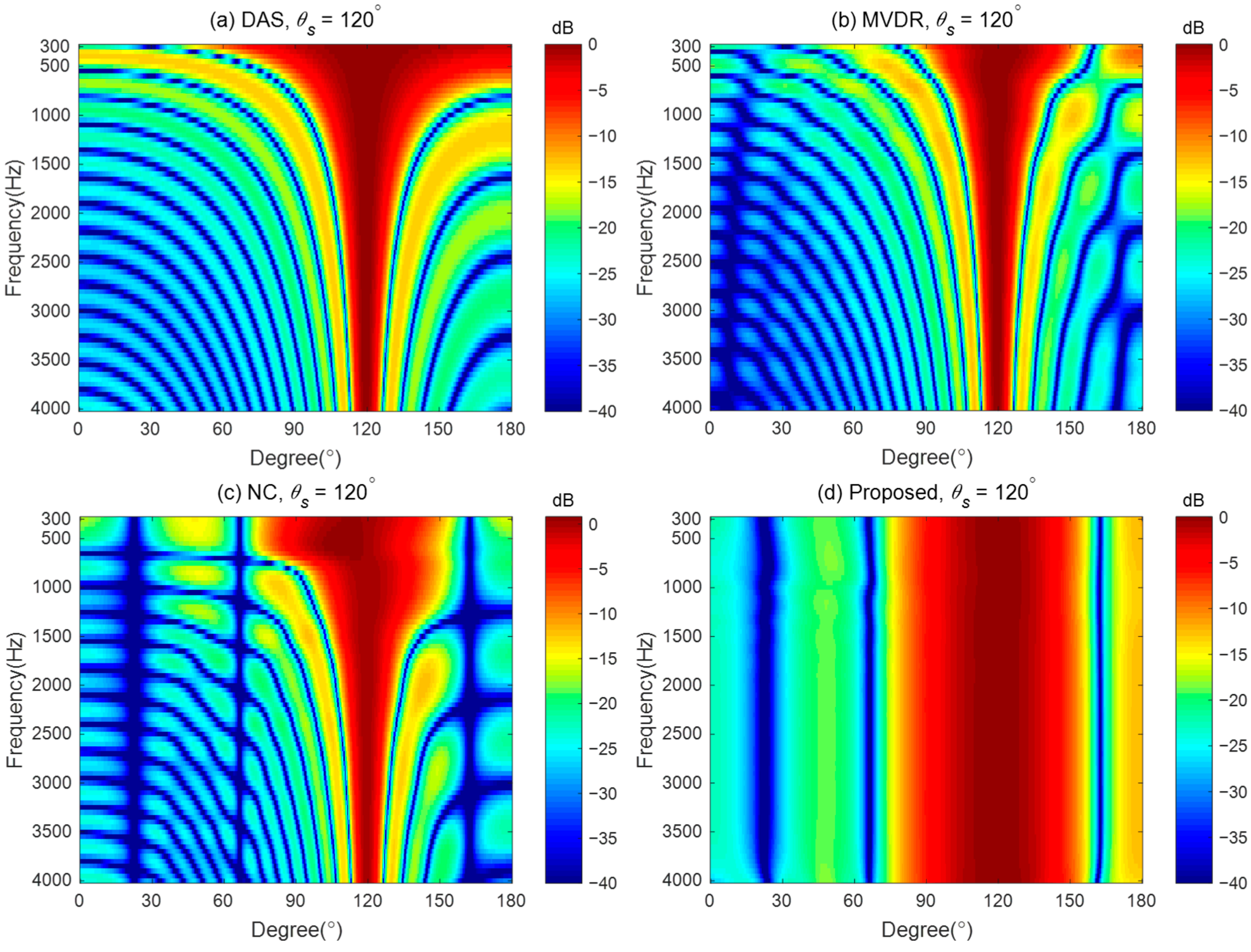
4.5. Comparison with Other Steerable Beamforming Methods
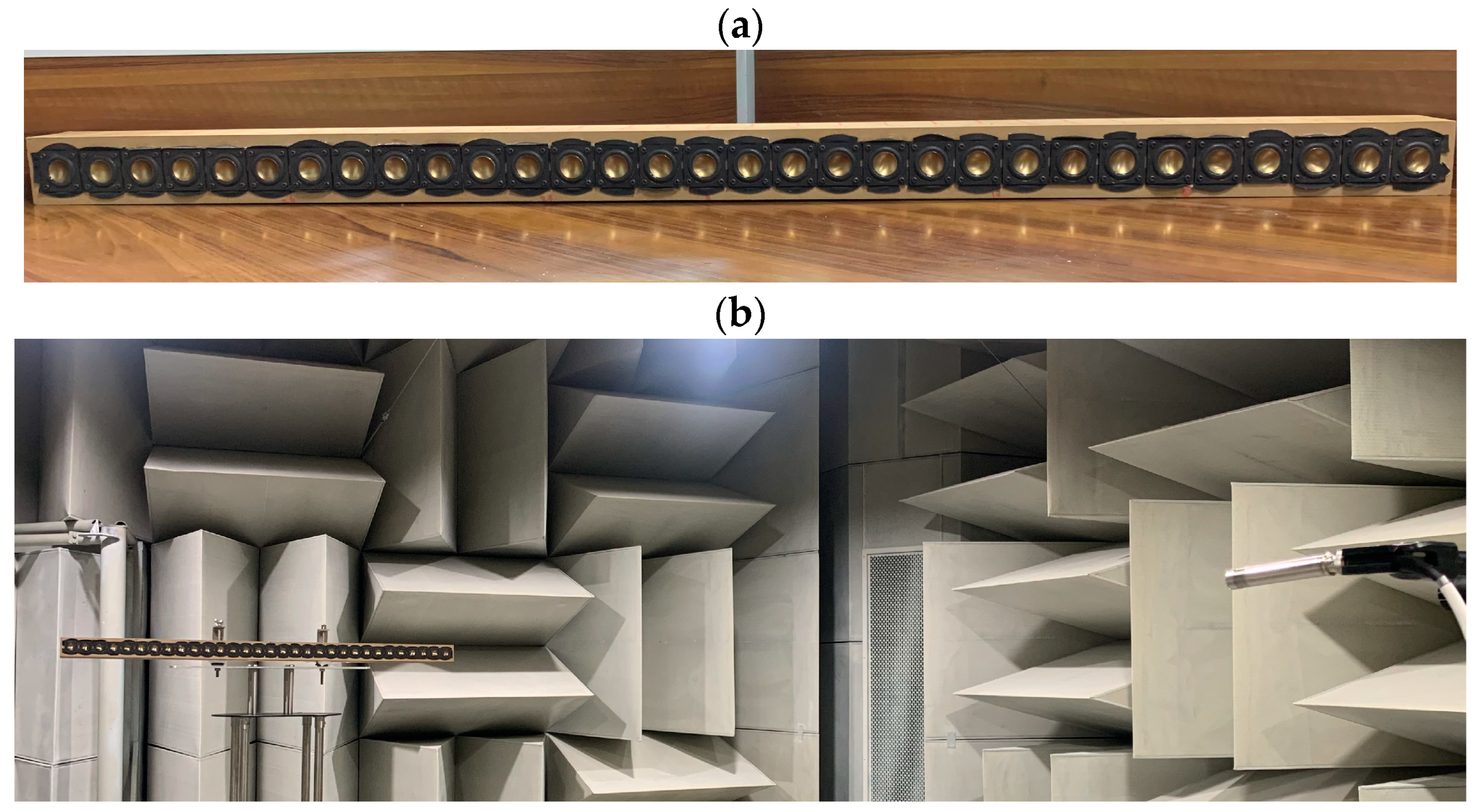
5. Experiment and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Don, H.; Johnson, D.E.D. Array Signal Processing Concepts and Techniques; Prentice-Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Elko, G.W. Superdirectional microphone arrays. In Acoustic Signal Processing for Telecommunication; Springer: Berlin, Germany, 2000. [Google Scholar]
- Van Trees, H.L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Liu, W.; Weiss, S. Wideband Beamforming Concepts and Techniques; John Wiley& Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Benesty, J.; Cohen, I.; Chen, J. Fundamentals of Signal Enhancement and Array Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Yan, S. Broadband Array Processing; Springer: Berlin, Germany, 2019. [Google Scholar]
- Benesty, J.; Chen, J.; Huang, Y. Microphone Array Signal Processing; Springer Science & Business Media: Berlin, Germany, 2008. [Google Scholar]
- Chen, H.; Ser, W. Design of Robust Broadband Beamformers With Passband Shaping Characteristics Using Tikhonov Regularization. IEEE Trans. Audio Speech Lang. Process. 2009, 17, 665–681. [Google Scholar] [CrossRef]
- Cohen, I.; Benesty, J.; Chen, J. Differential Kronecker product beamforming. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 892–902. [Google Scholar] [CrossRef]
- Yu, G.; Qiu, Y.; Wang, N. A Robust Wavenumber-Domain Superdirective Beamforming for Endfire Arrays. IEEE Trans. Signal Process. 2021, 69, 4890–4905. [Google Scholar] [CrossRef]
- Hao, X.; Wang, Y.; Zhang, Y.; Yang, Y. An optimization method for frequency-invariant beamforming with arbitrary sensor arrays. Appl. Acoust. 2023, 207, 109328. [Google Scholar] [CrossRef]
- Zhang, J.; Gong, P.; Wu, Y.; Li, L.; Yu, L. Frequency-invariant beamformer design via ADPM approach. Signal Process. 2023, 204, 108814. [Google Scholar] [CrossRef]
- Mabande, E.; Kellermann, W. Towards superdirective beamforming with loudspeaker arrays. In Proceedings of the Conf. Rec. International Congress on Acoustics, Madrid, Spain, 2–7 September 2007. [Google Scholar]
- Boone, M.M.; Cho, W.-H.; Ih, J.-G. Design of a highly directional endfire loudspeaker array. J. Audio Eng. Soc. 2009, 57, 309–325. [Google Scholar]
- Bai, M.R.; Hsieh, Y.H. Point focusing using loudspeaker arrays from the perspective of optimal beamforming. J. Acoust. Soc. Am. 2015, 137, 3393. [Google Scholar] [CrossRef]
- Zhao, S.; Qiu, X.; Burnett, I. Acoustic contrast control in an arc-shaped area using a linear loudspeaker array. J. Acoust. Soc. Am. 2015, 137, 1036–1039. [Google Scholar] [CrossRef]
- Gölles, L.; Zotter, F.; Merkel, L. Miniature line array for immersive sound reinforcement. In Proceedings of the Audio Engineering Society Conference: AES 2023 International Conference on Spatial and Immersive Audio, Huddersfield, UK, 23–25 August 2023. [Google Scholar]
- Pan, K.; Huang, J.; Cheng, J.; Shen, Y. Loudspeaker array beamforming for sound projection in a half-space with an impedance boundary. J. Acoust. Soc. Am. 2023, 153, 1626–1636. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J. Study and Design of Differential Microphone Arrays; Springer: Heidelberg, Germany, 2012. [Google Scholar]
- Chen, J.; Benesty, J.; Pan, C. On the design and implementation of linear differential microphone arrays. J. Acoust. Soc. Am 2014, 136, 3097–3113. [Google Scholar] [CrossRef]
- Pan, C.; Chen, J.; Benesty, J. Theoretical Analysis of Differential Microphone Array Beamforming and an Improved Solution. IEEE/ACM Trans. Audio Speech Lang. Process. 2015, 23, 2093–2105. [Google Scholar] [CrossRef]
- Pan, C.; Chen, J.; Benesty, J. Reduced-order robust superdirective beamforming with uniform linear microphone arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 1548–1559. [Google Scholar] [CrossRef]
- Zhao, L.; Benesty, J.; Chen, J. Design of robust differential microphone arrays with the Jacobi–Anger expansion. Appl. Acoust. 2016, 110, 194–206. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, H.; Tu, Q. Sensor Imperfection Tolerance Analysis of Robust Linear Differential Microphone Arrays. IIEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 2915–2929. [Google Scholar] [CrossRef]
- Wang, J.; Yang, F.; Hu, X.; Yang, J. Theoretical Analysis of Maclaurin Expansion based Linear Differential Microphone Arrays and Improved Solutions. IEEE/ACM Trans. Audio Speech Lang. Process. 2024, 32, 3811–3825. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; He, Z.; Ma, Y.; Li, B. Robust Superdirective Frequency-Invariant Beamforming for Circular Sensor Arrays. IEEE Signal Process. Lett. 2017, 24, 1193–1197. [Google Scholar] [CrossRef]
- Huang, G.; Chen, J.; Benesty, J. Insights Into Frequency-Invariant Beamforming With Concentric Circular Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2018, 26, 2305–2318. [Google Scholar] [CrossRef]
- Itzhak, G.; Benesty, J.; Cohen, I. Multistage approach for steerable differential beamforming with rectangular arrays. Speech Commun. 2022, 142, 61–76. [Google Scholar] [CrossRef]
- Albertini, D.; Bernardini, A.; Borra, F.; Antonacci, F.; Sarti, A. Two-Stage Beamforming With Arbitrary Planar Arrays of Differential Microphone Array Units. IEEE/ACM Trans. Audio Speech Lang. Process. 2023, 31, 590–602. [Google Scholar] [CrossRef]
- Wang, J.; Yang, F.; Li, J.; Sun, H.; Yang, J. Mode matching-based beamforming with frequency-wise truncation order for concentric circular differential microphone arrays. J. Acoust. Soc. Am. 2023, 154, 3931–3940. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, J.; Yang, F.; Yang, J. A note on the design of frequency-invariant beamforming with uniform concentric circular microphone array. Appl. Acoust. 2024, 217, 109826. [Google Scholar] [CrossRef]
- Huang, G.; Benesty, J.; Chen, J. On the Design of Frequency-Invariant Beampatterns With Uniform Circular Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 25, 1140–1153. [Google Scholar] [CrossRef]
- Zhao, X.; Huang, G.; Chen, J.; Benesty, J. On the Design of 3D Steerable Beamformers With Uniform Concentric Circular Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 2764–2778. [Google Scholar] [CrossRef]
- Wang, X.; Benesty, J.; Chen, J.; Huang, G.; Cohen, I. Beamforming with Cube Microphone Arrays Via Kronecker Product Decompositions. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 1774–1784. [Google Scholar] [CrossRef]
- Itzhak, G.; Cohen, I. Differential constant-beamwidth beamforming with cube arrays. Speech Commun. 2023, 149, 98–107. [Google Scholar] [CrossRef]
- Zhao, X.; Huang, G.; Chen, J.; Benesty, J. Design of 2D and 3D Differential Microphone Arrays With a Multistage Framework. IEEE/ACM Trans. Audio Speech Lang. Process. 2023, 31, 2016–2031. [Google Scholar] [CrossRef]
- Zhao, X.; Luo, X.; Huang, G.; Chen, J.; Benesty, J. Differential Beamforming with Null Constraints for Spherical Microphone Arrays. In Proceedings of the 2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Republic of Korea, 14–19 April 2024; pp. 776–780. [Google Scholar]
- Borra, F.; Bernardini, A.; Antonacci, F.; Sarti, A. Uniform Linear Arrays of First-Order Steerable Differential Microphones. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 1906–1918. [Google Scholar] [CrossRef]
- Tu, Q.; Chen, H. On Mainlobe Orientation of the First- and Second-Order Differential Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 2025–2040. [Google Scholar] [CrossRef]
- Jin, J.; Huang, G.; Wang, X.; Chen, J.; Benesty, J.; Cohen, I. Steering Study of Linear Differential Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 158–170. [Google Scholar] [CrossRef]
- Yu, G. Eigenbeam-space transformation based steerable differential beamforming for linear arrays. Signal Process. 2023, 212, 109171. [Google Scholar] [CrossRef]
- Luo, X.; Jin, J.; Huang, G.; Chen, J.; Benesty, J. Design of Steerable Linear Differential Microphone Arrays With Omnidirectional and Bidirectional Sensors. IEEE Signal Process. Lett. 2023, 30, 463–467. [Google Scholar] [CrossRef]
- Luo, X.; Jin, J.; Huang, G.; Chen, J.; Benesty, J. Design of Fully Steerable Differential Beamformers With Linear Superarrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2024, 32, 3076–3089. [Google Scholar] [CrossRef]
- Choi, J.-W.; Kim, Y.; Ko, S.; Kim, J. A differential approach for the implementation of superdirective loudspeaker array. In Proceedings of the Audio Engineering Society Convention 128, London, UK, 22–25 May 2010. [Google Scholar]
- Kim, Y.-H.; Choi, J.-W. Sound Visualization and Manipulation; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Choi, J.W. Generation of a Near-field Sound Zone Using Broadside Differential Array. In Proceedings of the 2021 Immersive and 3D Audio: From Architecture to Automotive (I3DA), Bologna, Italy, 8–10 September 2021. [Google Scholar]
- Wang, J.; Zhang, W.; Pan, C.; Chen, J.; Benesty, J. On the design of differential loudspeaker arrays with broadside radiation patterns. JASA Express Lett. 2021, 1, 084804. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Mao, J.; Cai, Y.; Ye, C. Sound reproduction with a circular loudspeaker array using differential beamforming method. In Proceedings of the 2022 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Chiang Mai, Thailand, 7–10 November 2022; pp. 143–148. [Google Scholar]
- Miotello, F.; Bernardini, A.; Albertini, D.; Antonacci, F.; Sarti, A. Steerable First-Order Differential Loudspeaker Arrays with Monopole and Dipole Elements. In Proceedings of the Convention of the European Acoustics Association, Forum Acusticum, Turin, Italy, 11–15 September 2023; pp. 11–15. [Google Scholar]
- Zhang, Y.; Mao, J.; Cai, Y.; Ye, C.; Zhu, Q. Broadband frequency-invariant broadside beamforming with a differential loudspeaker array. In Proceedings of the 2023 31st European Signal Processing Conference (EUSIPCO), Helsinki, Finland, 4–8 September 2023; pp. 1728–1732. [Google Scholar]
- Zhang, Y.; Wei, H.; Zhu, Q. Design of Robust Broadband Frequency-Invariant Broadside Beampatterns for the Differential Loudspeaker Array. Appl. Sci. 2024, 14, 6383. [Google Scholar] [CrossRef]
- Huang, G.; Benesty, J.; Cohen, I.; Chen, J. A Simple Theory and New Method of Differential Beamforming With Uniform Linear Microphone Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 28, 1079–1093. [Google Scholar] [CrossRef]
- Huang, G.; Benesty, J.; Chen, J. Fundamental Approaches to Robust Differential Beamforming With High Directivity Factors. IEEE/ACM Trans. Audio Speech Lang. Process. 2022, 30, 3074–3088. [Google Scholar] [CrossRef]
- Grant, M.C.; Boyd, S.P. The CVX Users’ Guide; CVX Research, Inc.: Austin, TX, USA, 2020. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Bitzer, J.; Simmer, K.U. Superdirective microphone arrays. In Microphone Arrays: Signal Processing Techniques and Applications; Springer: Berlin/Heidelberg, Germany, 2001; pp. 19–38. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Xiang, Q.; Zhu, Q. Design of Differential Loudspeaker Line Array for Steerable Frequency-Invariant Beamforming. Sensors 2024, 24, 6277. https://doi.org/10.3390/s24196277
Zhang Y, Xiang Q, Zhu Q. Design of Differential Loudspeaker Line Array for Steerable Frequency-Invariant Beamforming. Sensors. 2024; 24(19):6277. https://doi.org/10.3390/s24196277
Chicago/Turabian StyleZhang, Yankai, Qian Xiang, and Qiaoxi Zhu. 2024. "Design of Differential Loudspeaker Line Array for Steerable Frequency-Invariant Beamforming" Sensors 24, no. 19: 6277. https://doi.org/10.3390/s24196277
APA StyleZhang, Y., Xiang, Q., & Zhu, Q. (2024). Design of Differential Loudspeaker Line Array for Steerable Frequency-Invariant Beamforming. Sensors, 24(19), 6277. https://doi.org/10.3390/s24196277