
Radar Target Radar Cross-Section Measurement Based on Enhanced Imaging and Scattering Center Extraction



Abstract
1. Introduction
2. Enhanced Imaging and Scattering Center Extraction Techniques
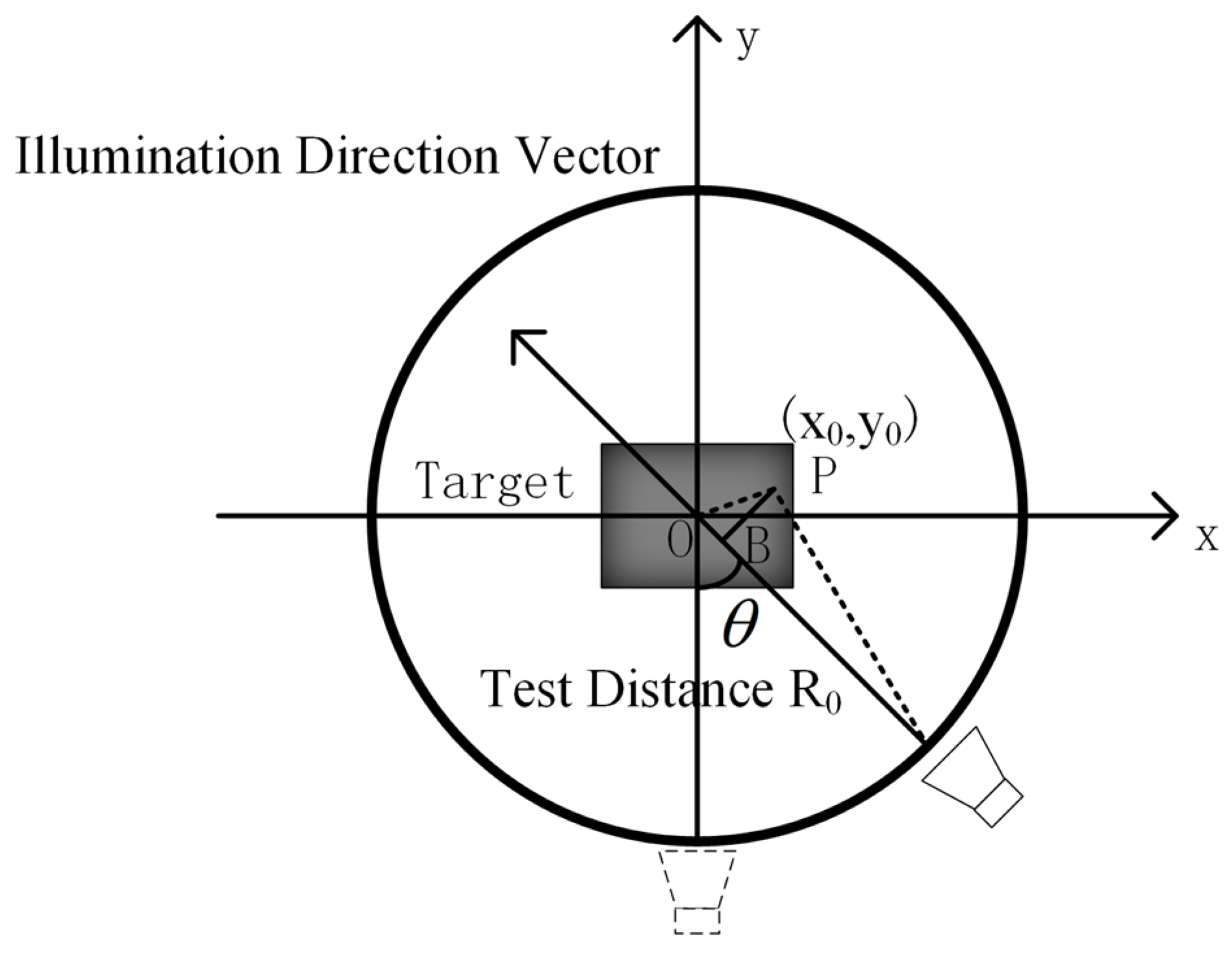
2.1. Conventional Turntable Imaging
2.2. Enhanced Imaging Using Sub-Aperture Synthesis and Image Fusion
2.3. RCS Inversion Based on Sequence CLEAN Technique
- The kth iteration selects the n peaks in the image and calculates the signal energy:
- The dirty point spread function is subtracted from the image for the first peak record searched, corresponding to its complex value and position .
- Calculate the energy of the new signal , .
- Compare the energy of the new signal with that of the signal before the reduction, and if , then this reduction is considered to be a real target; record the position and amplitude of this point, set k = k + 1, and repeat steps 1–3.
- If , the current reduction is considered to be a false target and the iterative process is terminated.
- Repeat steps 2–5 for n peaks.
- If the energy of the signal after the final iteration converges, terminate the entire iterative process.
- A clean image is obtained by convolving the ideal point spread function with the recorded points.
2.4. Complete Workflow of Proposed Method
3. Experimental Analyses
3.1. Simulation Analysis
3.1.1. Simulation Experiment 1
3.1.2. Simulation Experiment 2
3.2. Experimental Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, K.; Gao, Y.; Li, X. Target scattering characteristics for OAM-based radar. AIP Adv. 2018, 8, 025002. [Google Scholar] [CrossRef]
- Zhang, M. All-Metal Coding Metasurfaces for Broadband Terahertz RCS Reduction and Infrared Invisibility. Photonics 2023, 10, 962. [Google Scholar] [CrossRef]
- He, S.; Hua, M.; Zhang, Y.; Du, X.; Zhang, F. Forward Modeling of Scattering Centers From Coated Target on Rough Ground for Remote Sensing Target Recognition Applications. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–17. [Google Scholar] [CrossRef]
- Zheng, L. RCFusion: Fusing 4-D Radar and Camera With Bird’s-Eye View Features for 3-D Object Detection. IEEE Trans. Instru. Meas. 2023, 72, 8503814. [Google Scholar] [CrossRef]
- Zhu, F.-Y.; Chai, S.-R.; Guo, L.-X.; He, Z.-X.; Zou, Y.-F. Intelligent RCS Extrapolation Technology of Target Inspired by Physical Mechanism Based on Scattering Center Model. Remote Sens. 2024, 16, 2506. [Google Scholar] [CrossRef]
- Larsson, C. Nearfield RCS measurements of full scale targets using ISAR. In Proceedings of the 36th Annual Symposium of the Antenna Measurements Techniques Association, Tucson, AZ, USA, 12–17 October 2014; pp. 79–84. [Google Scholar]
- Dang, J.; Luo, Y.; Hu, C. A Local RCS Diagnosis Method Based on Near Field Measurement. IEEE Trans. Instrum. Meas. 2023, 72, 8007309. [Google Scholar] [CrossRef]
- Ren, Q.; Wei, X.; Gao, C.; Lyu, M. Three-dimensional BP Imaging Algorithm using MIMO System. Procedia Comput. Sci. 2021, 187, 103–108. [Google Scholar] [CrossRef]
- Zhao, C.; Xu, L.; Bai, X.; Chen, J. Near-Field High-Resolution SAR Imaging with Sparse Sampling Interval. Sensors 2022, 22, 5548. [Google Scholar] [CrossRef] [PubMed]
- Broquetas, A.; Palau, J.; Jofre, L.; Cardama, A. Spherical wave near-field imaging and radar cross-section measurement. IEEE Trans. Antennas Propag. 1998, 46, 730–735. [Google Scholar] [CrossRef]
- Burkholder, R.J.; Gupta, L.J.; Johnson, J.T. Comparison of monostatic and bistatic radar images. IEEE Antennas Propag. Mag. 2003, 45, 41–50. [Google Scholar] [CrossRef]
- Sensani, S. Radar Image Based Near-Field to Far-Field Conversion Algorithm in RCS Measurements. In Proceedings of the IEEE International Symposium on Measurements & Networking, Catania, Italy, 8–10 July 2019; pp. 1–6. [Google Scholar]
- Alvarez, J. Near-Field 2-D-Lateral Scan System for RCS Measurement of Full-Scale Targets Located on the Ground. IEEE Trans. Antennas Propag. 2019, 67, 4049–4058. [Google Scholar] [CrossRef]
- Sundermeier, M.F.; Fischer, D. Compact Radar Cross-Section Measurement Setup and Performance Evaluation. Adv. Radio Sci. 2021, 19, 147–152. [Google Scholar] [CrossRef]
- Yang, R. High-Resolution Microwave Imaging; Springer: Singapore, 2018; Chapter 16; pp. 491–542. [Google Scholar]
- Scheiner, B.; Lurz, F.; Michler, F.; Weigel, R.; Koelpin, A. Frequency Response Characterization of Surface Acoustic Wave Resonators Using a Six-Port Frequency Measurement System. In Proceedings of the 2019 Kleinheubach Conference, Miltenberg, Germany, 23–25 September 2019; pp. 1–4. [Google Scholar]
- Thakur, A.; Saini, D.S. Modifying Polyphase Codes to Mitigate Range Side-lobes in Pulse Compression Radar. Wirel. Pers. Commun. 2022, 123, 693–707. [Google Scholar] [CrossRef]
- Martorella, M. Academic Press Library in Signal Processing. In Sidiropoulos, Fulvio Gini, Rama Chellappa, & Sergios Theodoridis; Nicholas, D., Ed.; Elsevier: Amsterdam, The Netherlands, 2014; Volume 2, pp. 987–1042. [Google Scholar]
- Jeong, M.K.; Kwon, S.J. Side lobe free medical ultrasonic imaging with application to assessing side lobe suppression filter. Biomed. Eng. Lett. 2018, 8, 355–364. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J. Enhanced Doppler Resolution and Sidelobe Suppression Performance for Golay Complementary Waveforms. Remote Sens. 2023, 15, 2452. [Google Scholar] [CrossRef]
- Jayaprakasam, S.; Abdul Rahim, S.K.; Leow, C.Y.; Ting, T.O. Sidelobe reduction and capacity improvement of open-loop collaborative beamforming in wireless sensor networks. PLoS ONE 2017, 12, e0175510. [Google Scholar] [CrossRef] [PubMed]
- Han, Y. A Single-Shot Scattering Medium Imaging Method via Bispectrum Truncation. Sensors 2024, 24, 2002. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wang, H.; Qiao, Z.-J. Resolution enhancement for ISAR imaging via improved statistical compressive sensing. EURASIP J. Adv. Signal Proc. 2016, 80, 1–19. [Google Scholar] [CrossRef]
- Gao, Y.; Xing, M.; Guo, L.; Zhang, Z. Extraction of Anisotropic Characteristics of Scattering Centers and Feature Enhancement in Wide-Angle SAR Imagery Based on the Iterative Re-Weighted Tikhonov Regularization. Remote Sens. 2018, 10, 2066. [Google Scholar] [CrossRef]
- Han, L.; Feng, C. High-Resolution Imaging and Micromotion Feature Extraction of Space Multiple Targets. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6278–6291. [Google Scholar]
- Cao, T.-T.; Rosenberg, L. An Improved CLEAN Algorithm for ISAR. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Object Name | Simulation Coordinate | Extract Coordinates | Error |
|---|---|---|---|
| Ball 1 | (0, −0.24) | (−0.015, −0.235) | (0.015, 0.005) |
| Ball 2 | (0, −0.12) | (−0.015, −0.115) | (0.015, 0.005) |
| Ball 3 | (0, 0) | (−0.01, 0) | (0.01, 0) |
| Ball 4 | (0, 0.12) | (−0.01, 0.12) | (0.01, 0) |
| Ball 5 | (0, 0.24) | (−0.02, 0.24) | (0.02, 0) |
| Method | Traditional Method | Proposed Method |
|---|---|---|
| SLR | −16.7027 dB | −21.0652 dB |
| Aperture Size | MAE (dBsm) | RMSE (dBsm) |
|---|---|---|
| 30° | 1.2203 | 1.7497 |
| 24° | 1.2347 | 1.7853 |
| 20° | 1.2390 | 1.8250 |
| Method | Traditional Method | Proposed Method |
|---|---|---|
| SLR | −9.6141 dB | −12.582 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, X.; Wang, C.; Fang, Y.; Wu, B.; Zhao, D.; Hu, J. Radar Target Radar Cross-Section Measurement Based on Enhanced Imaging and Scattering Center Extraction. Sensors 2024, 24, 6315. https://doi.org/10.3390/s24196315
Tan X, Wang C, Fang Y, Wu B, Zhao D, Hu J. Radar Target Radar Cross-Section Measurement Based on Enhanced Imaging and Scattering Center Extraction. Sensors. 2024; 24(19):6315. https://doi.org/10.3390/s24196315
Chicago/Turabian StyleTan, Xin, Chaoqi Wang, Yang Fang, Bai Wu, Dongyan Zhao, and Jiansheng Hu. 2024. "Radar Target Radar Cross-Section Measurement Based on Enhanced Imaging and Scattering Center Extraction" Sensors 24, no. 19: 6315. https://doi.org/10.3390/s24196315
APA StyleTan, X., Wang, C., Fang, Y., Wu, B., Zhao, D., & Hu, J. (2024). Radar Target Radar Cross-Section Measurement Based on Enhanced Imaging and Scattering Center Extraction. Sensors, 24(19), 6315. https://doi.org/10.3390/s24196315