

Design and Experimental Test of Rope-Driven Force Sensing Flexible Gripper

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
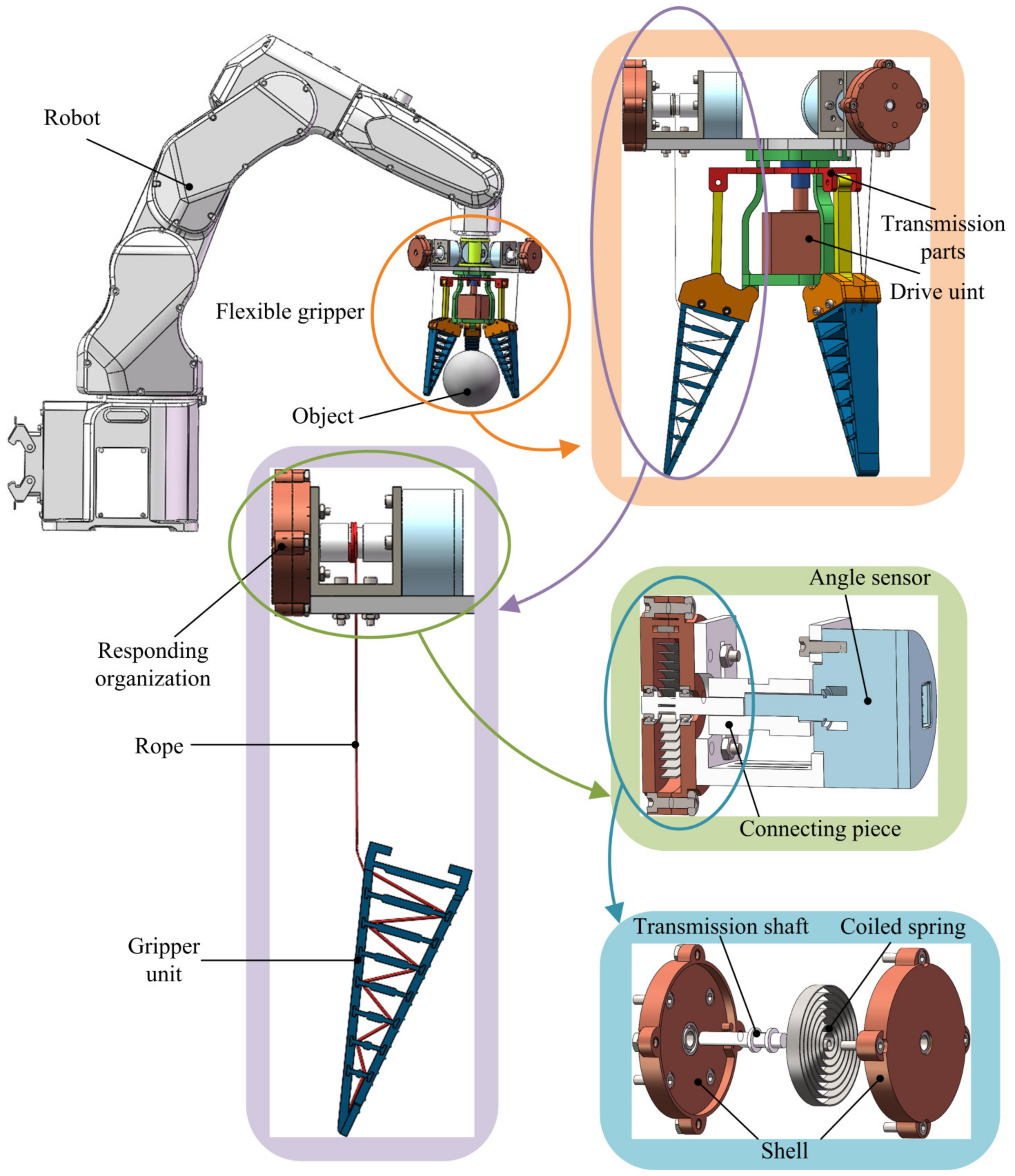
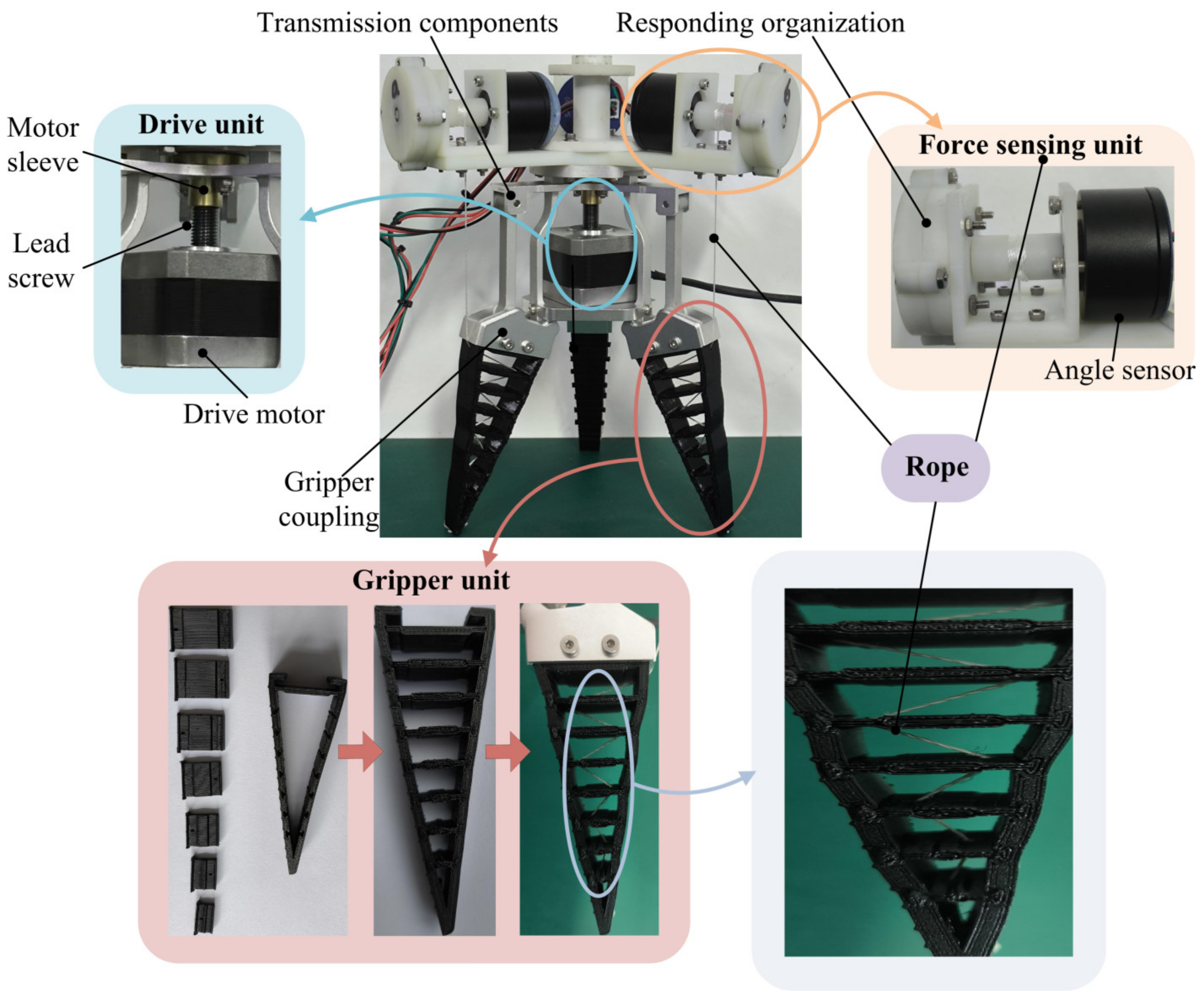
2. Structure Design and Prototype Development
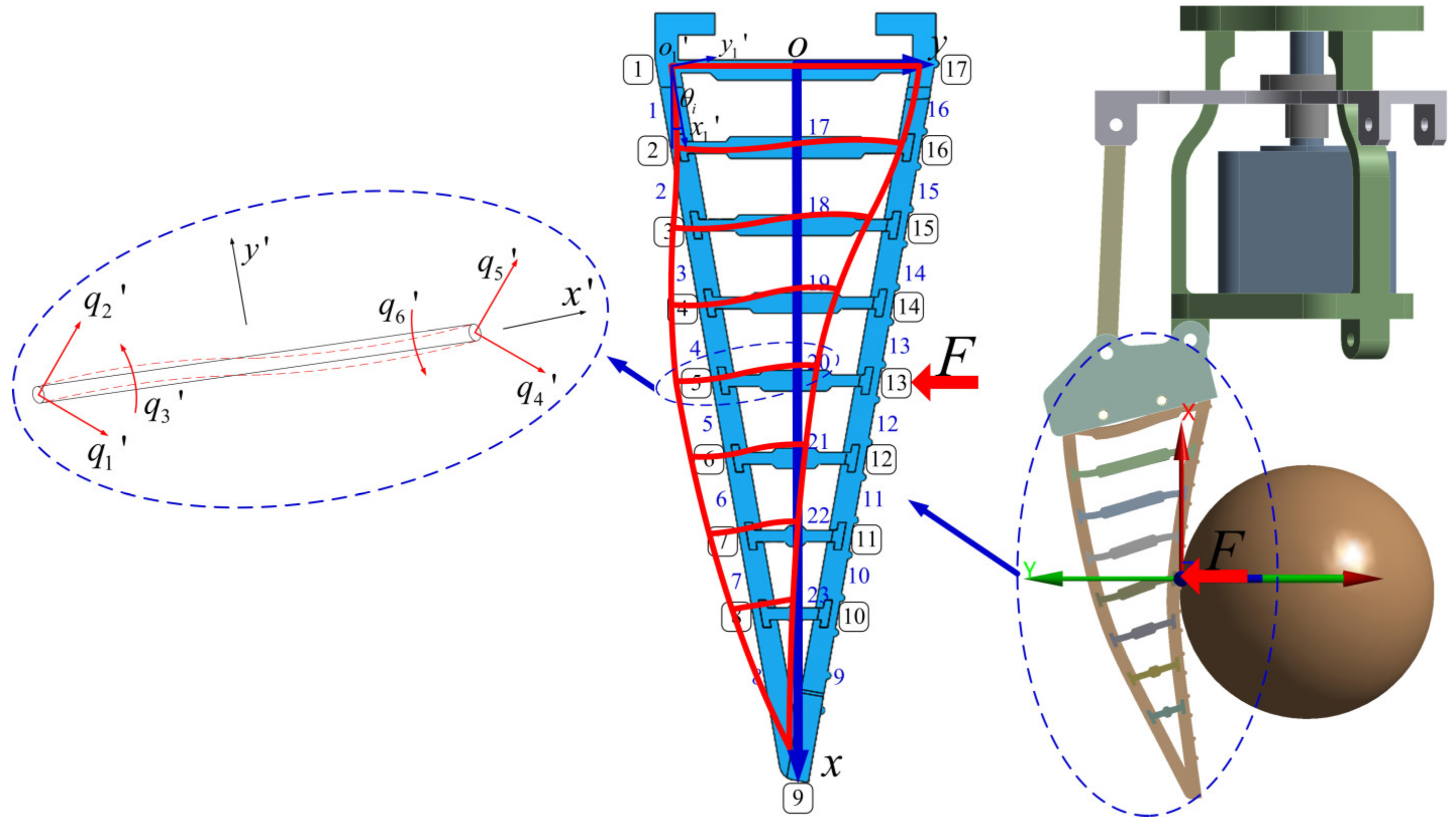
3. Force Sensing Strategy
3.1. Relationship Matrix
3.2. Determination of Contact Force
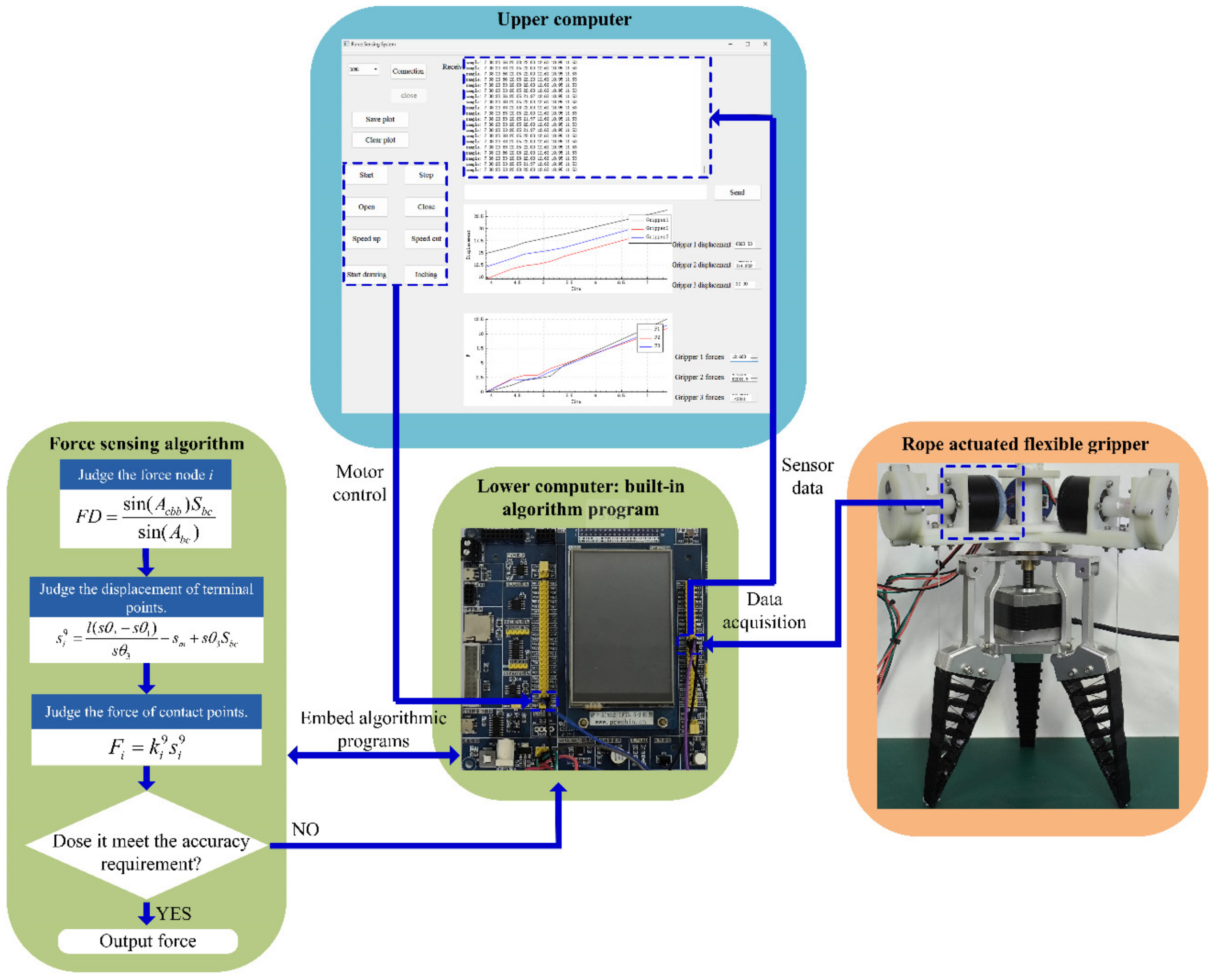
4. Experimental Study
4.1. Experimental System
4.2. Results Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Y.X.; Wan, X.F.; Duo, H.X. Review of rigid fruit and vegetable picking robots. Int. J. Agr. Biol. Eng. 2023, 16, 1–11. [Google Scholar] [CrossRef]
- Wang, Z.H.; Xun, Y.; Wang, Y.K.; Yang, Q.H. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar] [CrossRef]
- Navas, E.; Shamshiri, R.R.; Dworak, V.; Weltzien, C.; Fernandez, R. Soft gripper for small fruits harvesting and pick and place operations. Front. Robot. AI 2024, 10, 1330496. [Google Scholar] [CrossRef]
- Chen, M.Y.; Chen, Z.X.; Luo, L.F.; Tang, Y.C.; Cheng, J.B.; Wei, H.L.; Wang, J.H. Dynamic visual servo control methods for continuous operation of a fruit harvesting robot working throughout an orchard. Comput. Electron. Agric. 2024, 219, 108774. [Google Scholar] [CrossRef]
- Chen, X.Y.; Sun, Y.L.; Zhang, Q.J.; Dai, X.S.; Tian, S.; Guo, Y.X. Three-dimension object detection and forward-looking control strategy for non-destructive grasp of thin-skinned fruits. Appl. Soft. Comput. 2024, 150, 111082. [Google Scholar] [CrossRef]
- Tang, Y.C.; Chen, M.Y.; Wang, C.L.; Luo, L.F.; Li, J.H.; Lian, G.P.; Zou, X.J. Recognition and Localization Methods for Vision-Based Fruit Picking Robots: A Review. Front. Plant. Sci. 2020, 11, 510. [Google Scholar] [CrossRef]
- Wei, Y.Y.; Cai, L.H.; Fang, H.F.; Chen, H.Y. Fruit recognition and classification based on tactile information of flexible hand. Sens. Actuators A-Phys. 2024, 370, 115224. [Google Scholar] [CrossRef]
- He, Z.Y.; Lian, B.B.; Song, Y.M. Rigid-Soft Coupled Robotic Gripper for Adaptable Grasping. J. Bionic. Eng. 2023, 20, 2601–2618. [Google Scholar] [CrossRef]
- Zhu, Y.L.; Wang, T.; Gong, W.Z.; Feng, K.; Wang, X.; Xi, S. Design and motion analysis of soft robotic arm with pneumatic-network structure. Smart Mater. Struct. 2024, 33, 095038. [Google Scholar] [CrossRef]
- Tang, Z.L.; Xu, L.J.; Wang, Y.C.; Kang, Z.L.; Xie, H. Collision-Free Motion Planning of a Six-Link Manipulator Used in a Citrus Picking Robot. Appl. Sci. 2021, 11, 11336. [Google Scholar] [CrossRef]
- Deng, L.X.; Liu, T.Y.; Jiang, P.; Qi, A.L.; He, Y.C.; Li, Y.J.; Yang, M.Q.; Deng, X. Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers. Agronomy 2023, 13, 2231. [Google Scholar] [CrossRef]
- Pi, J.; Liu, J.; Zhou, K.H.; Qian, M.Y. An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping. Agriculture 2021, 11, 1014. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Z.J.; Wen, G.L.; He, J.F.; Wang, H.X.; Xue, L.; Long, K.; Xie, Y.M. Origami Chomper-Based Flexible Gripper with Superior Gripping Performances. Adv. Intell. 2023, 5, 2300238. [Google Scholar] [CrossRef]
- Wang, R.G.; Li, X.P.; Huang, H.B. Design of thick panels origami-inspired flexible grasper with anti-interference ability. Mech. Mach. Theory 2023, 189, 105431. [Google Scholar] [CrossRef]
- Li, H.L.; Yao, J.T.; Wei, C.J.; Zhou, P.; Xu, Y.D.; Zhao, Y.S. An untethered soft robotic gripper with high payload-to-weight ratio. Mech. Mach. Theory 2021, 158, 104226. [Google Scholar] [CrossRef]
- Liu, P.B.; Qian, J.W.; Yan, P.; Liu, Y. Design, analysis and evaluation of a self-lockable constant-force compliant gripper. Sens. Actuators A-Phys. 2022, 335, 113354. [Google Scholar] [CrossRef]
- Hao, T.Z.; Xiao, H.P.; Liu, Y.B.; Pang, D.Z.; Liu, S.H. Gripping performance of soft grippers with fingerprint-like surface texture for objects with slippery surfaces. Tribol. Int. 2023, 189, 108992. [Google Scholar] [CrossRef]
- Wang, B.Z.; Yu, T.T. Numerical investigation of novel 3D-SPA for gripping analysis in multi-environment. Int. J. Mech. Sci. 2023, 240, 107916. [Google Scholar] [CrossRef]
- Fan, Q.; Miao, J.L.; Tian, M.W.; Zhao, H.T.; Zhu, S.F.; Liu, X.H.; Ma, Y.L.; Qu, L.J. Low-voltage driven flexible double-layer electrothermal actuator for smart human-machine interactions. Sens. Actuators A-Phys. 2020, 315, 112352. [Google Scholar] [CrossRef]
- Ji, H.; Zhang, L.; Nie, S.; Huo, L.F.; Nie, S.L.; Wu, Z.W. Optimization design and experiment study on a water hydraulic flexible actuator integrating flexible inner skeleton and soft external skin used for underwater flexible gripper. Sens. Actuators A-Phys. 2024, 366, 114957. [Google Scholar] [CrossRef]
- Nie, S.L.; Huo, L.F.; Ji, H.; Lan, Y.; Wu, Z.W. Bending deformation characteristics of high-pressure soft actuator driven by water-hydraulics for underwater manipulator. Sens. Actuators A-Phys. 2022, 344, 113736. [Google Scholar] [CrossRef]
- Jin, L.Y.; Wang, Z.P.; Tian, S.J.; Feng, J.T.; An, C.Q.; Xu, H.R. Grasping perception and prediction model of kiwifruit firmness based on flexible sensing claw. Comput. Electron. Agric. 2023, 215, 108389. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, S.F.; Li, C.F.; Yang, H.; Hao, L.N. Size recognition and adaptive grasping using an integration of actuating and sensing soft pneumatic gripper. Robot. Auton. Syst. 2018, 104, 14–24. [Google Scholar] [CrossRef]
- Ren, J.; Wu, F.; Shang, E.R.; Li, D.Y.; Liu, Y. 3D printed smart elastomeric foam with force sensing and its integration with robotic gripper. Sens. Actuators A-Phys. 2023, 349, 113998. [Google Scholar] [CrossRef]
- Dilibal, S.; Sahin, H.; Danquah, J.O.; Emon, M.O.F.; Choi, J.W. Additively Manufactured Custom Soft Gripper with Embedded Soft Force Sensors for an Industrial Robot. Int. J. Precis. Eng. Manuf. 2021, 22, 709–718. [Google Scholar] [CrossRef]
- Xu, J.S.; Xie, Z.J.; Yue, H.H.; Lu, Y.F.; Yang, F. A triboelectric multifunctional sensor based on the controlled buckling structure for motion monitoring and bionic tactile of soft robots. Nano Energy 2022, 104 Pt A, 107845. [Google Scholar] [CrossRef]
- Sun, Z.D.; Zhu, M.L.; Zhang, Z.X.; Chen, Z.C.; Shi, Q.F.; Shan, X.C.; Yeow, R.C.H.; Lee, C.K. Artificial Intelligence of Things (AIoT) Enabled Virtual Shop Applications Using Self-Powered Sensor Enhanced Soft Robotic Manipulator. Adv. Sci. 2021, 8, 14. [Google Scholar] [CrossRef]
- Wang, H.J.; Zhou, C.; Li, H.Z.; Chen, J.M.; Yu, P.; Chen, C.G.; Zhang, Y.Z. A soft robot tactile fingertip for grasping surface posture detection. Smart Mater. Struct. 2024, 33, 065014. [Google Scholar] [CrossRef]
- Lan, C.C.; Lin, C.M.; Fan, C.H. A Self-Sensing Microgripper Module With Wide Handling Ranges. IEEE-ASME Trans. Mechatron. 2011, 16, 141–150. [Google Scholar] [CrossRef]
- Wang, W.; Tang, Y.X.; Li, C. Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects. Int. J. Mech. Sci. 2021, 193, 106181. [Google Scholar] [CrossRef]
- Xie, Y.X.; Zhang, B.H.; Zhou, J.; Bai, Y.H.; Zhang, M. An Integrated Multi-Sensor Network for Adaptive Grasping of Fragile Fruits: Design and Feasibility Tests. Sensors 2020, 20, 4973. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.S.; Wu, H.Y.; Zhu, Z.K.; Ye, Y.K.; Qian, M.B. Continuous picking of yellow peaches with recognition and collision-free path. Comput. Electron. Agric. 2023, 214, 108273. [Google Scholar] [CrossRef]
- Wang, C.L.; Li, C.J.; Han, Q.Y.; Wu, F.Y.; Zou, X.J.; Zhang, B.H. A Performance Analysis of a Litchi Picking Robot System for Actively Removing Obstructions, Using an Artificial Intelligence Algorithm. Agronomy 2023, 13, 2795. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, J.; Yi, B.Y.; Zhang, B.H.; Wang, K. A flexible swallowing gripper for harvesting apples and its grasping force sensing model. Comput. Electron. Agric. 2023, 204, 107489. [Google Scholar] [CrossRef]
- Xu, W.F.; Zhang, H.; Yuan, H.; Liang, B. A Compliant Adaptive Gripper and Its Intrinsic Force Sensing Method. IEEE Trans. Robot. 2021, 37, 1584–1603. [Google Scholar] [CrossRef]
- Yao, J.Q.; Fang, Y.F.; Yang, X.H.; Wang, P.Y.; Li, L.Q. Design optimization of soft robotic fingers biologically inspired by the fin ray effect with intrinsic force sensing. Mech. Mach. Theory 2024, 191, 105472. [Google Scholar] [CrossRef]
- Shan, X.W.; Birglen, L. Modeling and analysis of soft robotic fingers using the fin ray effect. Int. J. Robot. Res. 2020, 39, 1686–1705. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Liu, Y.; Ju, J.; Lu, E. Design and Experimental Test of Rope-Driven Force Sensing Flexible Gripper. Sensors 2024, 24, 6407. https://doi.org/10.3390/s24196407
Zhu Z, Liu Y, Ju J, Lu E. Design and Experimental Test of Rope-Driven Force Sensing Flexible Gripper. Sensors. 2024; 24(19):6407. https://doi.org/10.3390/s24196407
Chicago/Turabian StyleZhu, Zuhao, Yufei Liu, Jinyong Ju, and En Lu. 2024. "Design and Experimental Test of Rope-Driven Force Sensing Flexible Gripper" Sensors 24, no. 19: 6407. https://doi.org/10.3390/s24196407