
An Image-Based Sensor System for Low-Cost Airborne Particle Detection in Citizen Science Air Quality Monitoring




Abstract
:1. Introduction
2. Literature Review
2.1. Sources of Particulate Matter
2.2. Classification of Particulate Matter
2.3. Particulate Matter Detectors and Limitations
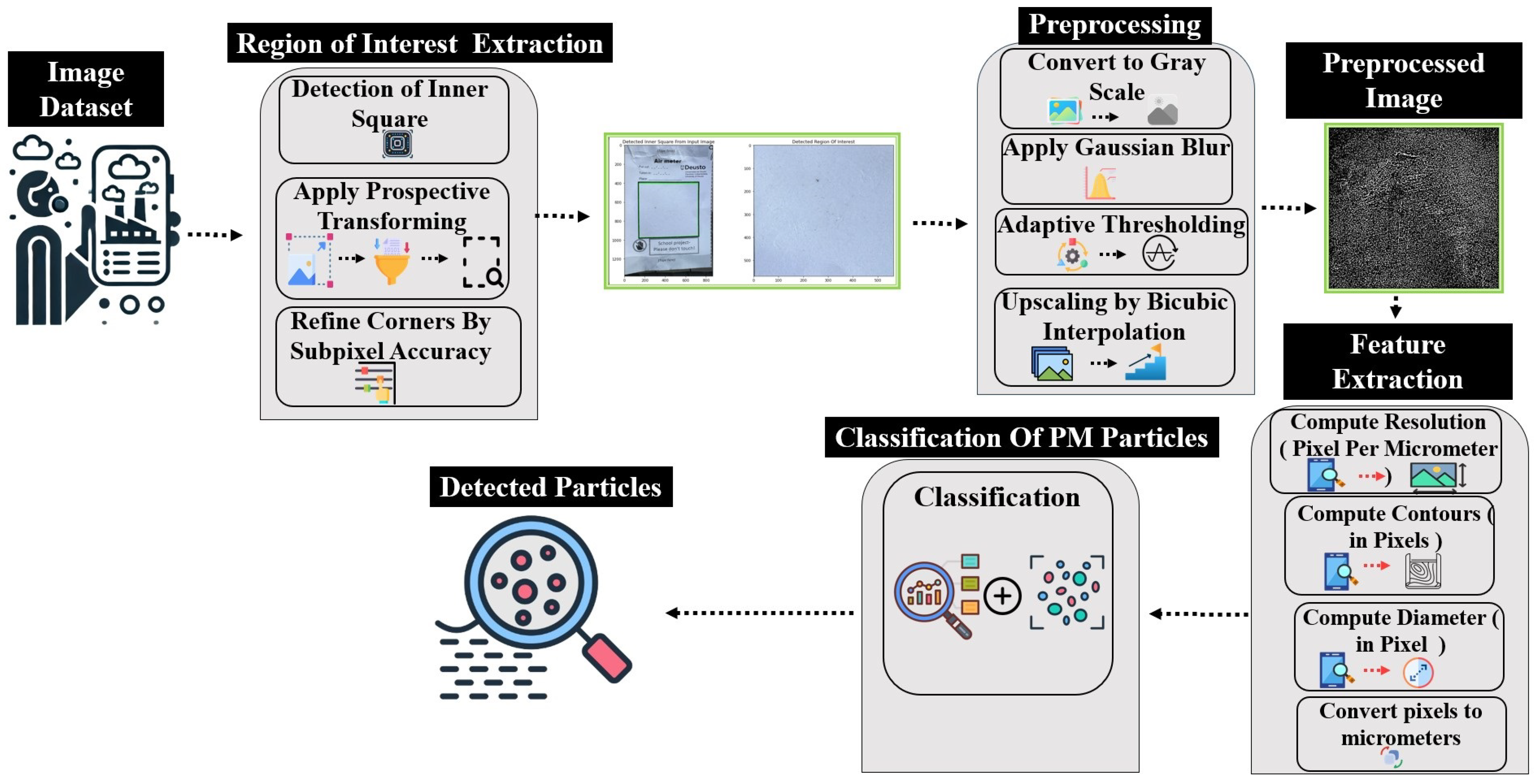
3. Overview of the Proposed Approach
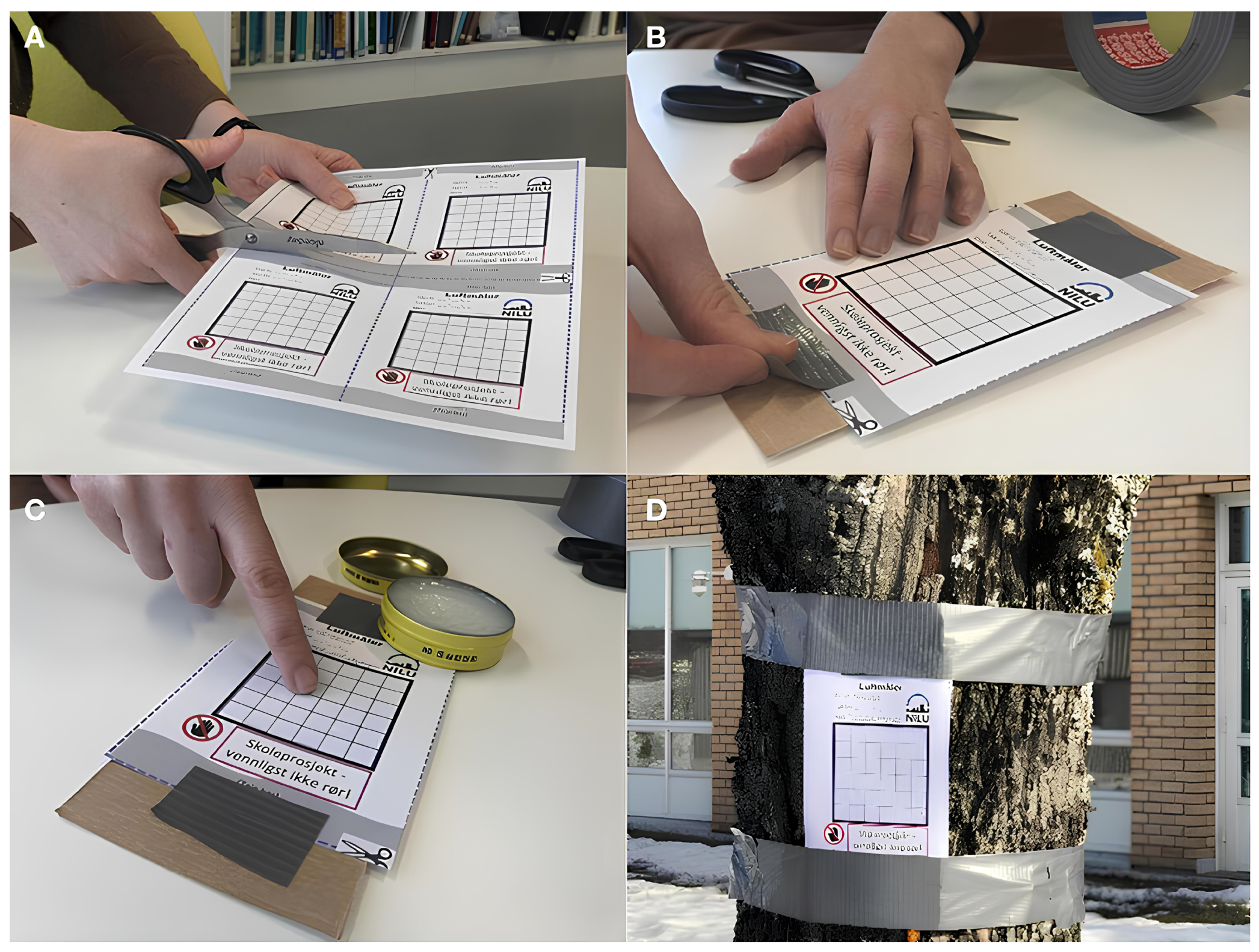
3.1. PM Detection System for DiY PM Sensor’s Pictures
3.2. Synthetic Image Data Generation
3.3. Adding Noises In Synthetic Images
3.3.1. Addition of Gaussian Noise
3.3.2. Addition of Focus Blur Noise
3.3.3. Addition of White Balance Adjustment Noise
4. Experimental Outcomes Across Different Experimental Settings with Noise
4.1. Accuracy
4.2. Reference for Classification
4.3. Examining the Effects of Adding Gaussian Noise in Synthetic Data Samples
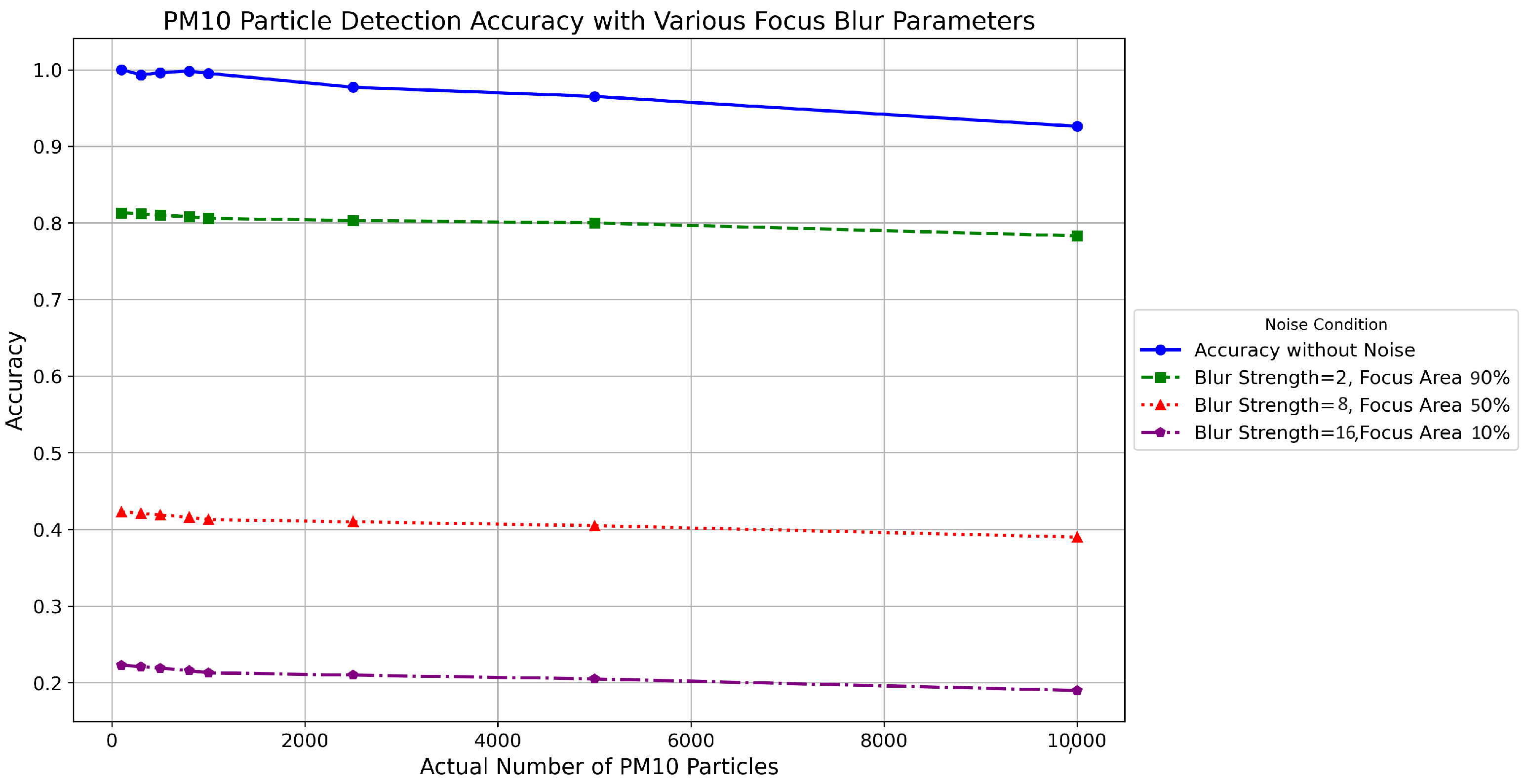
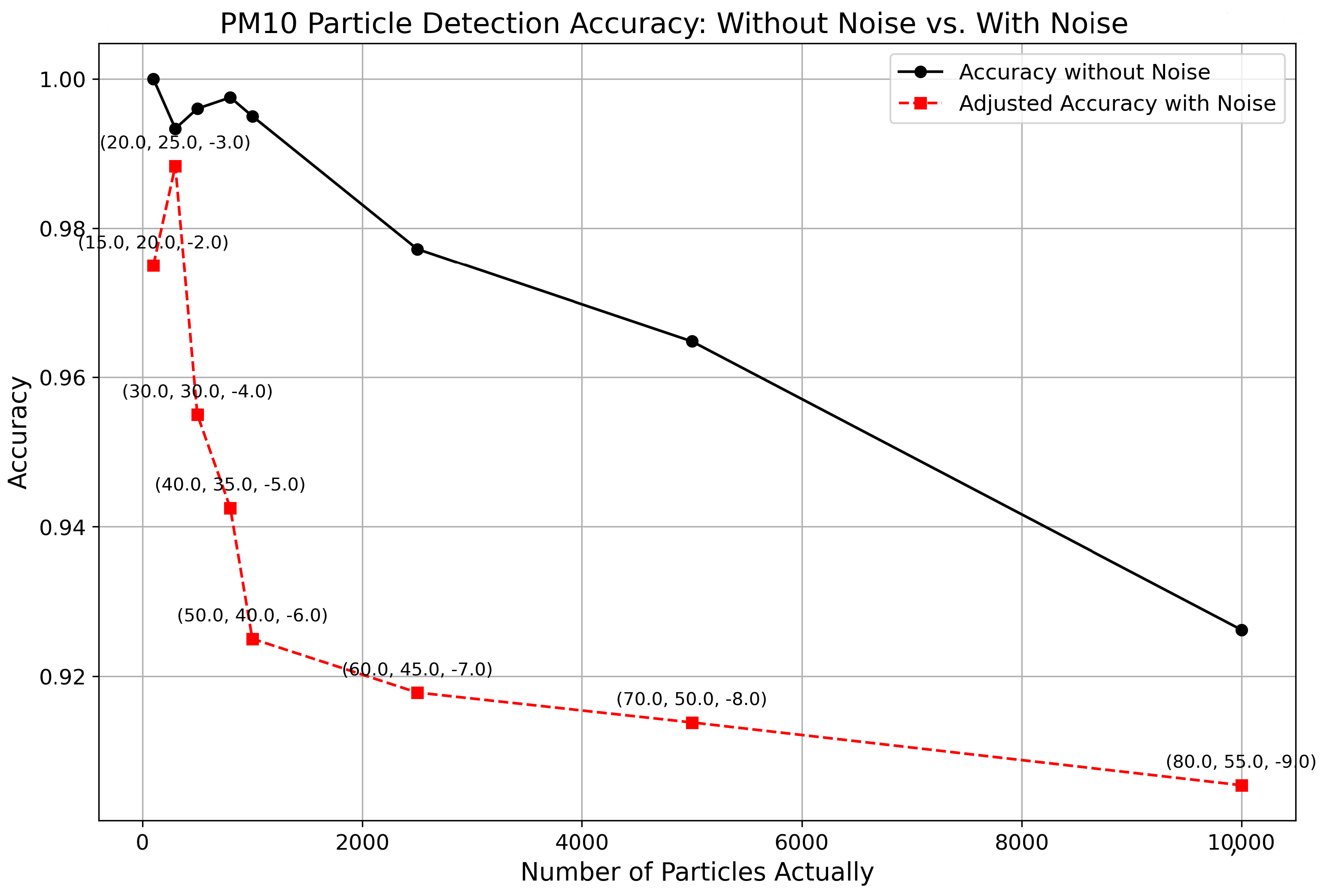
4.4. Examining the Effects of Adding Focus Blur Noise in Synthetic Data Samples
4.5. Examining the Effects of Adding White Balance Adjustment Noise in Synthetic Data Samples
4.6. Examining the Effects of Adding Gaussian Noise and White-Balanced Noise in Synthetic Data Samples
4.7. Examining the Effects of Adding Gaussian Noise, Focus Blur, and White-Balanced Noise in Synthetic Data Samples
5. Discussion
Limitations
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Particle Size Conversion: Pixels to Micrometres
Classification of Particulate Matter
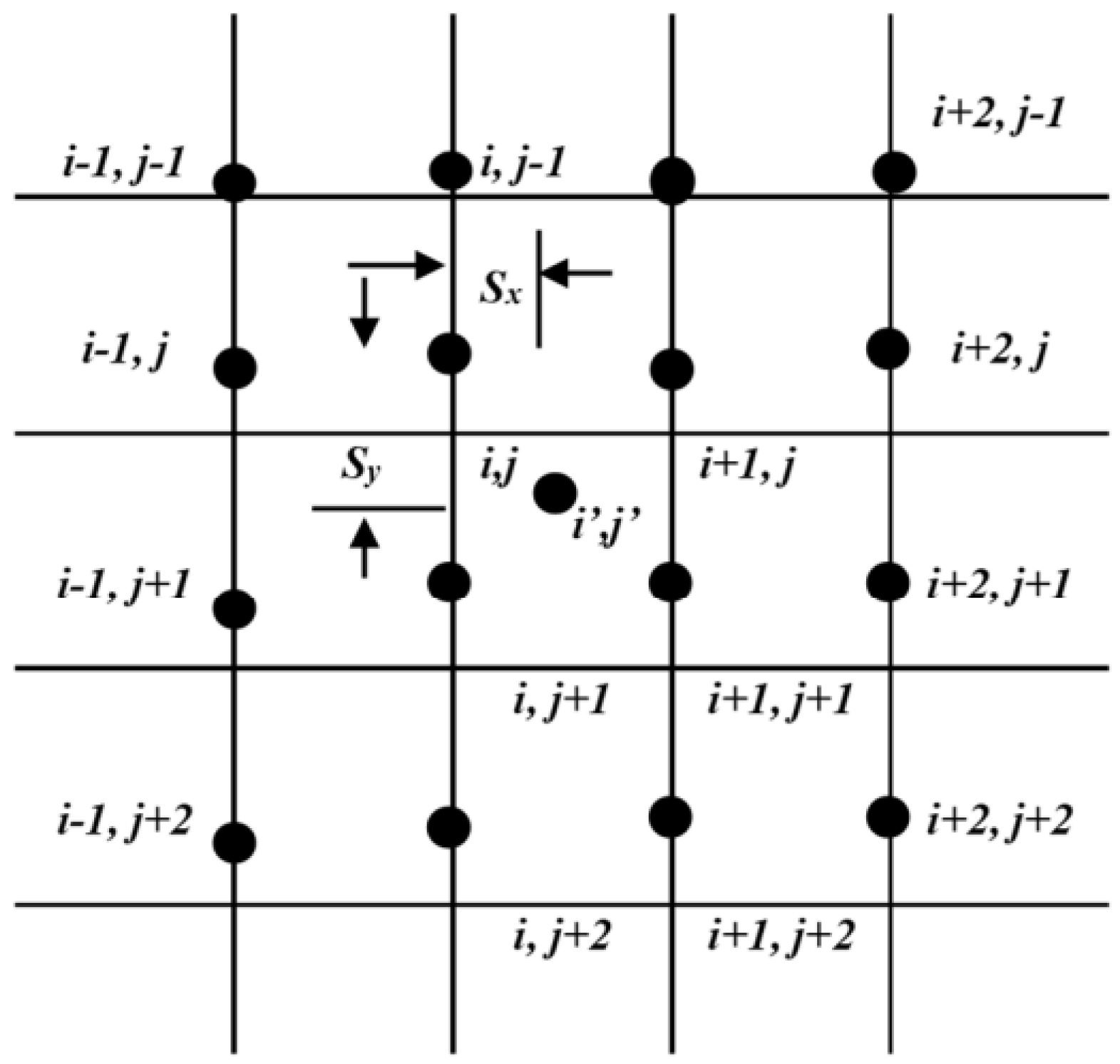
Appendix B. Additional Details on Image Resizing Algorithm
Matrix Operations and Pseudocode for Upscaling of Image
| Algorithm A1 Algorithm for resizing an image |
| 1: for to image width in pixels do 2: for to image height in pixels do 3: Arrange augmented y matrix using the weights from the referenced equations: 4: Apply the Gauss Jordan elimination method to solve for p values by Equation (A7): 6: Arrange augmented x matrix using the weights from the referenced equations: 7: Apply the Gauss Jordan elimination method to solve for p values by Equation (A9): 9: end for 10: end for 11: Perform rounding on each pixel value |
References
- Zgłobicki, W.; Baran-Zgłobicka, B. Air pollution in major Polish cities in the period 2005–2021: Intensity, effects and attempts to reduce it. Environ. Res. 2024, 240, 117497. [Google Scholar] [CrossRef] [PubMed]
- Tiwari, S.; Kumar, A.; Mantri, S.; Dey, S. Modelling ambient PM2.5 exposure at an ultra-high resolution and associated health burden in megacity Delhi: Exposure reduction target for 2030. Environ. Res. Lett. 2023, 18, 044010. [Google Scholar] [CrossRef]
- Manisalidis, I.; Stavropoulou, E.; Stavropoulos, A.; Bezirtzoglou, E. Environmental and health impacts of air pollution: A review. Front. Public Health 2020, 8, 505570. [Google Scholar] [CrossRef] [PubMed]
- Mahajan, S.; Chung, M.K.; Martinez, J.; Olaya, Y.; Helbing, D.; Chen, L.J. Translating citizen-generated air quality data into evidence for shaping policy. Humanit. Soc. Sci. Commun. 2022, 9, 122. [Google Scholar] [CrossRef]
- Hardini, M.; Chakim, M.H.R.; Magdalena, L.; Kenta, H.; Rafika, A.S.; Julianingsih, D. Image-based Air Quality Prediction using Convolutional Neural Networks and Machine Learning. Aptisi Trans. Technopreneurship (ATT) 2023, 5, 109–123. [Google Scholar] [CrossRef]
- Manshur, T.; Luiu, C.; Avis, W.R.; Bukachi, V.; Gatari, M.; Mulligan, J.; Radcliffe, J.; Singh, A.; Waiguru, E.; Wandera, A.; et al. A citizen science approach for air quality monitoring in a Kenyan informal development. City Environ. Interact. 2023, 19, 100105. [Google Scholar] [CrossRef]
- Ottosen, T.B.; Kumar, P. Outlier detection and gap filling methodologies for low-cost air quality measurements. Environ. Sci. Process. Impacts 2019, 21, 701–713. [Google Scholar] [CrossRef]
- Kamel Boulos, M.N.; Resch, B.; Crowley, D.N.; Breslin, J.G.; Sohn, G.; Burtner, R.; Pike, W.A.; Jezierski, E.; Chuang, K.Y.S. Crowdsourcing, citizen sensing and sensor web technologies for public and environmental health surveillance and crisis management: Trends, OGC standards and application examples. Int. J. Health Geogr. 2011, 10, 67. [Google Scholar] [CrossRef]
- Eitzel, M.; Cappadonna, J.; Santos-Lang, C.; Duerr, R.; West, S.E.; Virapongse, A.; Kyba, C.; Bowser, A.; Cooper, C.; Sforzi, A.; et al. Citizen science terminology matters: Exploring key terms. Citiz. Sci. Theory Pract. 2017, 2, 1. [Google Scholar] [CrossRef]
- Rappold, A.G.; Hano, M.; Prince, S.; Wei, L.; Huang, S.; Baghdikian, C.; Stearns, B.; Gao, X.; Hoshiko, S.; Cascio, W.; et al. Smoke Sense initiative leverages citizen science to address the growing wildfire-related public health problem. GeoHealth 2019, 3, 443–457. [Google Scholar] [CrossRef]
- Orfanou, A.; Vakalis, S.; Karelis, C.; Alexopoulos, C.; Charalabidis, Y.; Lekkas, D.F. Assessing the Correlation between Citizen Science and Carbon Footprint: Introduction of COMPAIR’s CO2 Calculator. Energies 2023, 16, 6228. [Google Scholar] [CrossRef]
- Hernandez-Jayo, U.; Garcia-Zubia, J.; López-De-Ipiña, D.; Casado-Mansilla, D.; Puerta-Beldarrain, M.; Martelo, A.B. SOCIO-BEE: Example of a Citizen Science Community for the Co-Creation of Measures to Reduce the Impact of Environmental Pollution in the Framework of Smart Cities. In Proceedings of the 2023 6th Experiment@ International Conference (exp. at’23), IEEE, Evora, Portugal, 5–7 June 2023; pp. 101–105. [Google Scholar]
- Zareba, M.; Weglinska, E.; Danek, T. Air pollution seasons in urban moderate climate areas through big data analytics. Sci. Rep. 2024, 14, 3058. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Li, N.; Yang, Y. Prediction of air quality indicators for the Beijing-Tianjin-Hebei region. J. Clean. Prod. 2018, 196, 682–687. [Google Scholar] [CrossRef]
- Chen, L.J.; Ho, Y.H.; Lee, H.C.; Wu, H.C.; Liu, H.M.; Hsieh, H.H.; Huang, Y.T.; Lung, S.C.C. An open framework for participatory PM2. 5 monitoring in smart cities. IEEE Access 2017, 5, 14441–14454. [Google Scholar] [CrossRef]
- Ullo, S.L.; Sinha, G.R. Advances in smart environment monitoring systems using IoT and sensors. Sensors 2020, 20, 3113. [Google Scholar] [CrossRef]
- Silva, L.T.; Mendes, J.F. City Noise-Air: An environmental quality index for cities. Sustain. Cities Soc. 2012, 4, 1–11. [Google Scholar] [CrossRef]
- Bell, S.; Cornford, D.; Bastin, L. How good are citizen weather stations? Addressing a biased opinion. Weather 2015, 70, 75–84. [Google Scholar] [CrossRef]
- Malings, C. Integrating Low-Cost Sensor Systems and Networks to Enhance Air Quality Applications. In Proceedings of the India Clean Air Summit (ICAS), Bengaluru, India, 26–30 August 2024. [Google Scholar]
- Atutxa, E.; Garcia-Torres, S.; Kyfonidis, C.; Karanassos, D.; Kopsacheilis, E.; Tsita, C.; Casado-Mansilla, D.; Emvoliadis, A.; Angelis, G.; López-de Ipiña, D.; et al. Engagement and Accessibility Tools for Pro-Environmental Action on Air Quality: The SOCIO-BEE Paradigm. Univers. Access Inf. Soc. 2024. [Google Scholar] [CrossRef]
- Castell, N.; Grossberndt, S.; Gray, L.; Fredriksen, M.F.; Skaar, J.S.; Høiskar, B.A.K. Implementing citizen science in primary schools: Engaging young children in monitoring air pollution. Front. Clim. 2021, 3, 639128. [Google Scholar] [CrossRef]
- Tran, L.D.; Nguyen, S.M.; Arai, M. GAN-based noise model for denoising real images. In Proceedings of the Asian Conference on Computer Vision, Kyoto, Japan, 30 November–4 December 2020. [Google Scholar]
- Kumar, R.R.; Priyadarshi, R. Denoising and segmentation in medical image analysis: A comprehensive review on machine learning and deep learning approaches. Multimed. Tools Appl. 2024, 1–59. [Google Scholar] [CrossRef]
- Afifi, M.; Brown, M.S. Deep white-balance editing. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1397–1406. [Google Scholar]
- Dausman, T.B.C. Low Cost Air Quality Monitors in Agriculture; The University of Iowa: Iowa City, IA, USA, 2017. [Google Scholar]
- Burton, R.K. Analysis of Low-Cost Particulate Matter Shinyei Sensor for Asthma Research; University of Maryland: Baltimore County, MD, USA, 2017. [Google Scholar]
- Raysoni, A.U.; Pinakana, S.D.; Mendez, E.; Wladyka, D.; Sepielak, K.; Temby, O. A Review of Literature on the Usage of Low-Cost Sensors to Measure Particulate Matter. Earth 2023, 4, 168–186. [Google Scholar] [CrossRef]
- Ali, M.; Siddique, I.; Abbas, S. Characterizing air pollution and its association with emission sources in Lahore: A guide to adaptation action plans to control pollution and smog. Appl. Sci. 2022, 12, 5102. [Google Scholar] [CrossRef]
- Rivas, I.; Beddows, D.C.; Amato, F.; Green, D.C.; Järvi, L.; Hueglin, C.; Reche, C.; Timonen, H.; Fuller, G.W.; Niemi, J.V.; et al. Source apportionment of particle number size distribution in urban background and traffic stations in four European cities. Environ. Int. 2020, 135, 105345. [Google Scholar] [CrossRef] [PubMed]
- Jugder, D.; Shinoda, M.; Sugimoto, N.; Matsui, I.; Nishikawa, M.; Park, S.U.; Chun, Y.S.; Park, M.S. Spatial and temporal variations of dust concentrations in the Gobi Desert of Mongolia. Glob. Planet. Chang. 2011, 78, 14–22. [Google Scholar] [CrossRef]
- Malyan, V.; Kumar, V.; Sahu, M. Significance of sources and size distribution on calibration of low-cost particle sensors: Evidence from a field sampling campaign. J. Aerosol Sci. 2023, 168, 106114. [Google Scholar] [CrossRef]
- Bej, D.; Chattaraj, N. Design of a Portable, Customizable Device with GPS Integration to Track Location-Specific Realtime Outdoor PM2.5 Pollution Exposure. In Proceedings of the 2024 Second International Conference on Emerging Trends in Information Technology and Engineering (ICETITE), Vellore, India, 22–23 February 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–7. [Google Scholar]
- Sridhar, K.; Radhakrishnan, P.; Swapna, G.; Kesavamoorthy, R.; Pallavi, L.; Thiagarajan, R. A modular IOT sensing platform using hybrid learning ability for air quality prediction. Meas. Sens. 2023, 25, 100609. [Google Scholar] [CrossRef]
- Wilson, W.; Chow, J.C.; Claiborn, C.; Fusheng, W.; Engelbrecht, J.; Watson, J.G. Monitoring of particulate matter outdoors. Chemosphere 2002, 49, 1009–1043. [Google Scholar] [CrossRef]
- Campos-Medina, M.; Blumer, A.; Kraus-Füreder, P.; Mayrhofer-Reinhartshuber, M.; Kainz, P.; Schmid, J.A. AI-Enhanced Blood Cell Recognition and Analysis: Advancing Traditional Microscopy with the Web-Based Platform IKOSA. J. Mol. Pathol. 2024, 5, 28–44. [Google Scholar] [CrossRef]
- Idrees, Z.; Zheng, L. Low cost air pollution monitoring systems: A review of protocols and enabling technologies. J. Ind. Inf. Integr. 2020, 17, 100123. [Google Scholar] [CrossRef]
- Ali Shah, S.M.; Casado-Mansilla, D.; López-de Ipiña, D.; Fernández, E.I.; Hassani, A.; Pérez, A.P. A Low-Cost Image Sensor for Particulate Matter Detection to Streamline Citizen Science Campaigns on Air Quality Monitoring. In Proceedings of the 2024 9th International Conference on Smart and Sustainable Technologies (SpliTech), Bol and Split, Croatia, 25–28 June 2024. [Google Scholar] [CrossRef]
- Triwijoyo, B.K.; Adil, A. Analysis of medical image resizing using bicubic interpolation algorithm. J. Ilmu Komput. 2021, 14, 20–29. [Google Scholar] [CrossRef]
- Bielova, O.; Hänsch, R.; Ley, A.; Hellwich, O. A Digital Image Processing Pipeline for Modelling of Realistic Noise in Synthetic Images. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 16–20 June 2019; pp. 2905–2914. [Google Scholar] [CrossRef]
- Hinterstoisser, S.; Lepetit, V.; Wohlhart, P.; Konolige, K. On pre-trained image features and synthetic images for deep learning. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Gu, C.; Lu, X.; He, Y.; Zhang, C. Blur removal via blurred-noisy image pair. IEEE Trans. Image Process. 2020, 30, 345–359. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, M.; Ali, S.S.; Riaz, M.M.; Ghafoor, A.; Ahmad, A. Color and white balancing in low-light image enhancement. Optik 2020, 209, 164260. [Google Scholar] [CrossRef]
- Voultsidis, D.; Gialelis, J.; Protopsaltis, G.; Bali, N.; Mountzouris, C. Utilizing Unobtrusive Portable Electronic Devices for Real-Time Assessment of Indoor PM2.5 and tVOC Exposure and Its Correlation with Heart Rate Variability. Procedia Comput. Sci. 2023, 224, 550–557. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Technique | Benefits | Drawbacks | Sensor Features |
|---|---|---|---|
| Tapered Element Oscillating Microbalance (TEOM) | Highly precise real-time data; automated data processing. | Requires heating, sensitive to environmental changes. | Direct mass measurement using oscillating tapered tube. |
| Beta Attenuation Monitors (BAMs) | Precise real-time PM monitoring; widely recognized for regulatory compliance. | Uses radioactive sources; sensitive to air moisture. | Continuous tape system; measures particle mass via beta ray attenuation. |
| Black Smoke Method | Simple, cost-effective; easy setup and maintenance. | Less precise; manual operation and frequent maintenance needed. | Traditional method using filter collection and weighing of black smoke. |
| Optical Analyzers | Real-time data; portable; high sensitivity. | Affected by external conditions; indirect mass estimation. | Utilizes light scattering and image processing for real-time analysis. |
| Particle Matter | Sensing Module | Measurement Technique | Cost |
|---|---|---|---|
| BAM-1020 Beta Attenuation Measurement Module | Beta Attenuation | Very High | |
| Aerocet 831 aerosol mass measurement module | Light Scattering | High | |
| OPC-N2 particle sensor | Light Scattering | Average | |
| Dn7c3ca006 Unit | Light Obscuration | Low | |
| 602 Betaplus | Beta Attenuation | Very High | |
| Aerocet 831 aerosol mass monitor | Light Scattering | High | |
| OPC-N2 particle sensor | Light Scattering | Average | |
| Gp2y1010au | Light Obscuration | Low |
| Parameter | Description |
|---|---|
| Particle Size | Defines the fineness of dust particles, ranging from 1 to 10 mm. |
| Image Height and Width | Determines the dimensions of the synthetic images. |
| Image Resolution | Measured in pixels per micrometre, set at 1 pixel per micrometre. |
| Description | Dots per cm2 | Air Pollution Level |
|---|---|---|
| The paper has many black and grey dots. Large parts of the paper have turned grey. | >50 | Very high |
| The paper has quite a few black and grey dots. There are some parts on the paper that have turned grey. | 26–50 | High |
| The paper has black and grey dots all over the surface, but there are no fields that are completely grey. | 11–25 | Medium |
| The paper has only a few black and grey dots, and there are no fields that are completely grey. | <11 | Low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali Shah, S.M.; Casado-Mansilla, D.; López-de-Ipiña, D. An Image-Based Sensor System for Low-Cost Airborne Particle Detection in Citizen Science Air Quality Monitoring. Sensors 2024, 24, 6425. https://doi.org/10.3390/s24196425
Ali Shah SM, Casado-Mansilla D, López-de-Ipiña D. An Image-Based Sensor System for Low-Cost Airborne Particle Detection in Citizen Science Air Quality Monitoring. Sensors. 2024; 24(19):6425. https://doi.org/10.3390/s24196425
Chicago/Turabian StyleAli Shah, Syed Mohsin, Diego Casado-Mansilla, and Diego López-de-Ipiña. 2024. "An Image-Based Sensor System for Low-Cost Airborne Particle Detection in Citizen Science Air Quality Monitoring" Sensors 24, no. 19: 6425. https://doi.org/10.3390/s24196425