
Performance Evaluation of a Bioinspired Geomagnetic Sensor and Its Application for Geomagnetic Navigation in Simulated Environment


Abstract
:1. Introduction
2. The Design and Simulation of the BWMV Sensor
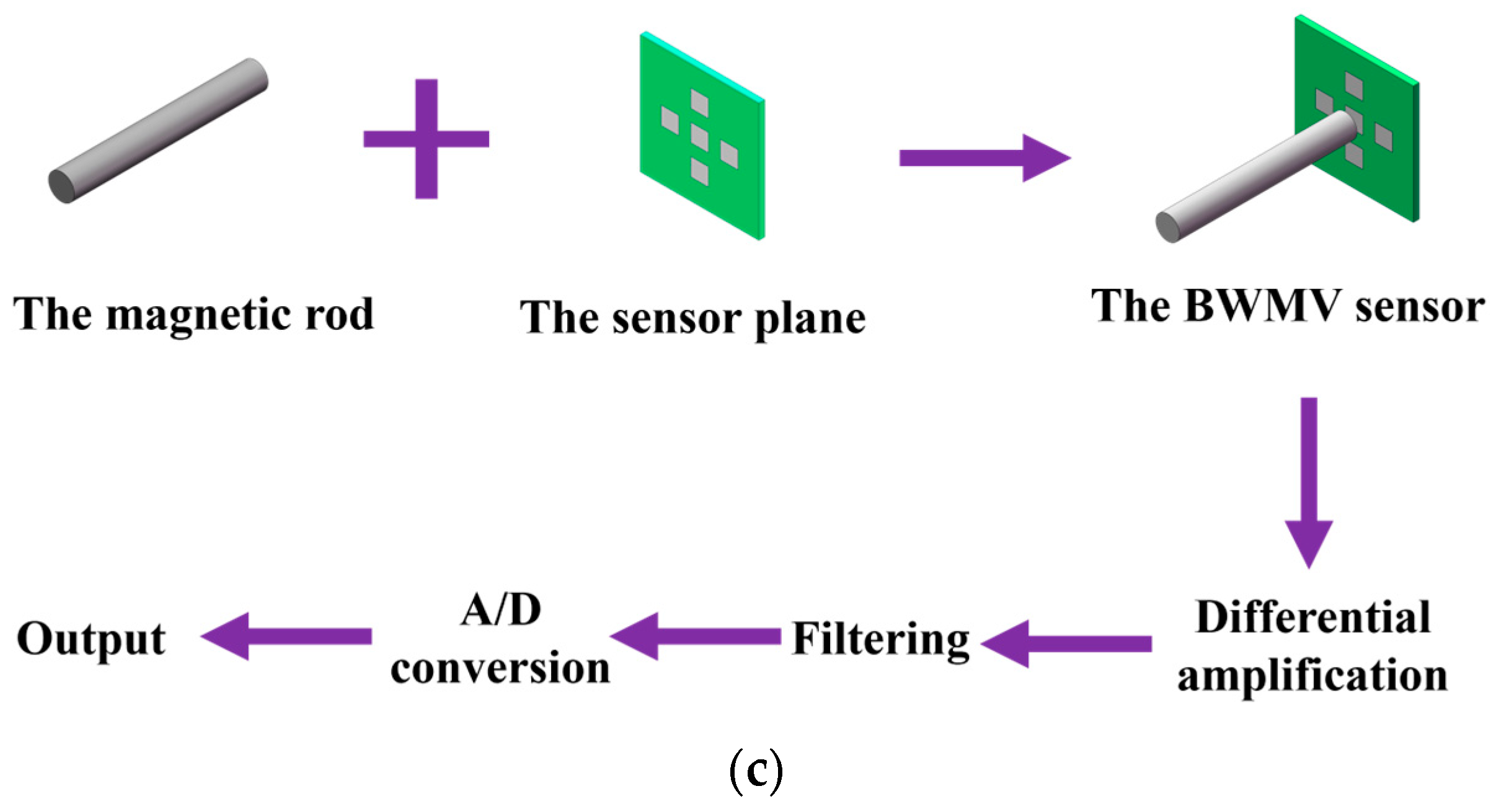
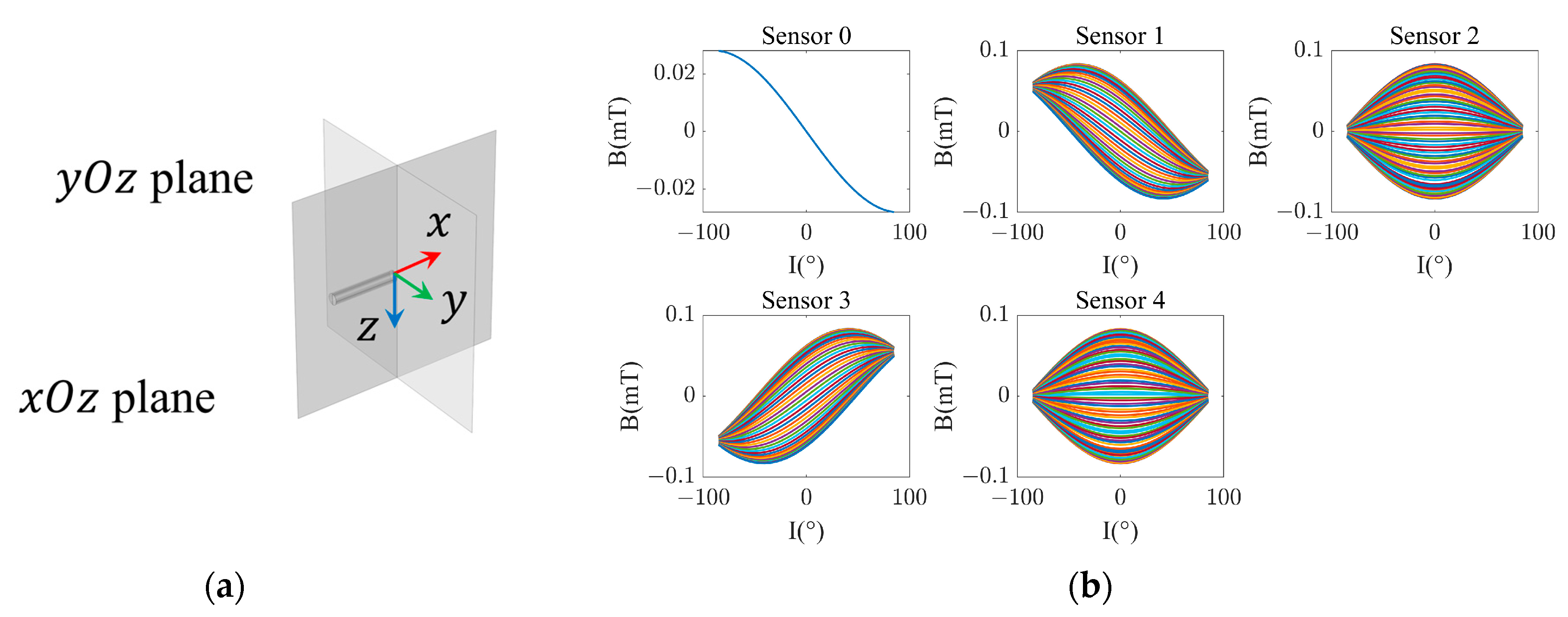
2.1. The Basic Principles of the BWMV Sensor
2.2. The Accuracy and Robustness of the BWMV Sensor
2.3. The Adaptability of the BWMV Sensor to Installation Errors
3. The Simulated Geomagnetic Navigation Platform and Bioinspired Navigation Algorithms
3.1. The Simulated Geomagnetic Navigation Platform
3.2. The Basic Process of Bioinspired Geomagnetic Navigation
- Determine the coordinates of the starting and target points, the target accuracy and initial navigation spacing of the navigation, and the corresponding navigation strategy;
- Set the latitude and longitude of the starting and target points and the geomagnetic model applied to calculate the geomagnetic field parameters of the actual position during navigation;
- Set the direction of movement according to the preset navigation strategy and adjust the navigation spacing according to the actual situation;
- The sensor performs simulated movement based on the set heading and navigation spacing, while the simulated geomagnetic navigation platform calculates the actual position and corresponding latitude and longitude after movement;
- The geomagnetic field parameters of the new location are calculated by the geomagnetic model and set as the background magnetic field of the sensor model;
- Simulate the sensor model and convert the simulated measured values of the sensors into the simulated measurement results of the magnetic field parameters.
4. Navigation Strategy and Simulated Experiment Verification
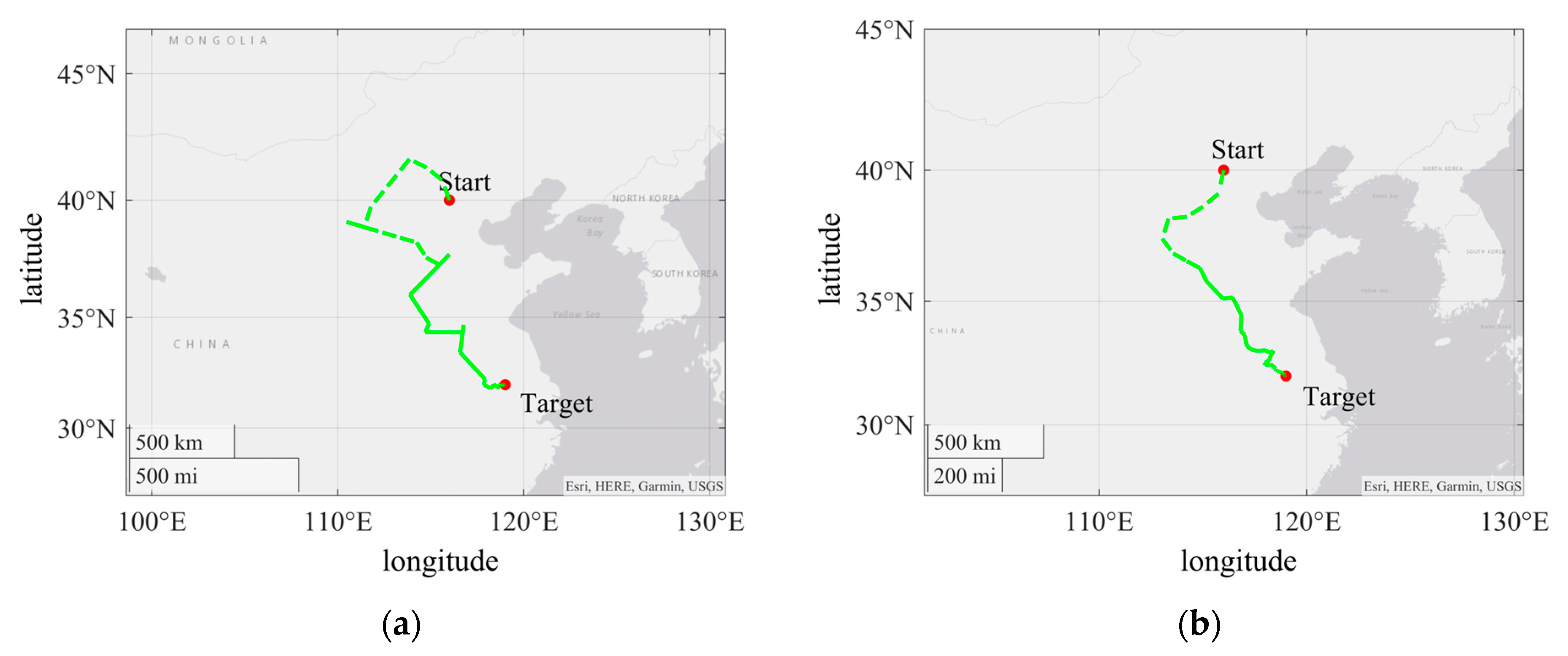
4.1. The Search Strategy in Geomagnetic Navigation without Prior Geomagnetic Map
4.2. Results and Analysis of Simulated Navigation Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, H.; Zhang, N.; Xu, L.; Lin, P.; Liu, Y.; Li, X. Summary of Research on Geomagnetic Navigation Technology. IOP Conf. Ser. Earth Environ. Sci. 2021, 769, 032031. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Y. Analysis of key technologies in geomagnetic navigation. In Proceedings of the International Symposium on Instrumentation and Control Technology, Beijing, China, 10–13 October 2008; p. 71282J. [Google Scholar]
- Li, W.; Wang, J.L. Magnetic Sensors for Navigation Applications: An Overview. J. Navig. 2014, 67, 263–275. [Google Scholar] [CrossRef]
- Khan, M.A.; Sun, J.; Li, B.; Przybysz, A.; Kosel, J. Magnetic sensors—A review and recent technologies. Eng. Res. Express 2021, 3, 022005. [Google Scholar] [CrossRef]
- Cheng, Q.; Sun, J.; Ge, Y.; Xue, L.; Mao, H.; Zhou, L.; Zhao, J. Bionic Magnetic Sensor Based on the MagR/Cry4 Complex-Configured Graphene Transistor with an Integrated On-Chip Gate. ACS Sens. 2023, 8, 793–802. [Google Scholar] [CrossRef]
- Cheng, Q.; Ge, Y.; Lin, B.; Zhou, L.; Mao, H.; Zhao, J. Capacitive Bionic Magnetic Sensors Based on One-Step Biointerface Preparation. ACS Appl. Mater. Interfaces 2024, 16, 6789–6798. [Google Scholar] [CrossRef]
- Winklhofer, M. The Physics of Geomagnetic-Field Transduction in Animals. IEEE Trans. Magn. 2009, 45, 5259–5265. [Google Scholar] [CrossRef]
- Kirschvink, J.L.; Gould, J.L. Biogenic Magnetite as a Basis for Magnetic-Field Detection in Animals. BioSystems 1981, 13, 181–201. [Google Scholar] [CrossRef]
- Hore, P.J.; Mouritsen, H. The Radical-Pair Mechanism of Magnetoreception. Ann. Rev. Biophys. 2016, 45, 299–344. [Google Scholar] [CrossRef]
- Zoltowski, B.D.; Chelliah, Y.; Wickramaratne, A.; Jarocha, L.; Karki, N.; Xu, W.; Mouritsen, H.; Hore, P.J.; Hibbs, R.E.; Green, C.B.; et al. Chemical and structural analysis of a photoactive vertebrate cryptochrome from pigeon. Proc. Natl. Acad. Sci. USA 2019, 116, 19449–19457. [Google Scholar] [CrossRef]
- Hochstoeger, T.; Al Said, T.; Maestre, D.; Walter, F.; Vilceanu, A.; Pedron, M.; Cushion, T.D.; Snider, W.; Nimpf, S.; Nordmann, G.C.; et al. The biophysical, molecular, and anatomical landscape of pigeon CRY4: A candidate light-based quantal magnetosensor. Sci. Adv. 2020, 6, eabb9110. [Google Scholar] [CrossRef]
- Li, H.; Liu, M.; Liu, K.; Zhang, F. A Study on the Model of Detecting the Variation of Geomagnetic Intensity Based on an Adapted Motion Strategy. Sensors 2018, 18, 39. [Google Scholar] [CrossRef] [PubMed]
- Jun, Z.; Qiong, W.; Cheng, C. Geomagnetic gradient bionic navigation based on the parallel approaching method. Proc. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2019, 233, 3131–3140. [Google Scholar] [CrossRef]
- Liu, M.Y.; Liu, K.; Peng, X.G.; Li, H. Bio-inspired navigation based on geomagnetic for the autonomous underwater vehicle. In Proceedings of the OCEANS 2014, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]
- Guo, J.J.; Liu, M.Y.; Wang, M.F.; Zhou, X.X.; Yang, Y. Bio-inspired Geomagnetic Navigation Algorithm Based on Segmented Search for AUV. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 100–105. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Luo, M.; Yang, C. Bio-Inspired Approach for Long-Range Underwater Navigation Using Model Predictive Control. IEEE Trans. Cybern. 2021, 51, 4286–4297. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.Q.; Niu, Y.; Liu, M.Y. Bionic Geomagnetic Navigation Method for AUV Based on Differential Evolution Algorithm. In Proceedings of the 2022 Ocean. Hampton Roads, Virtual, 17–20 October 2022. [Google Scholar] [CrossRef]
- Lü, Y.; Song, T. Avian magnetoreception model realized by coupling a magnetite-based mechanism with a radical-pair-based mechanism. Chin. Phys. B 2013, 22, 048701. [Google Scholar] [CrossRef]
- Shi, H.; Tang, R.; Wang, Q.; Song, T. Application of bioinspired geomagnetic sensor measurements and geomagnetic map modeling based on neural networks in simulated navigation. Meas. Sci. Technol. 2024, 35, 045127. [Google Scholar] [CrossRef]
- Gill, J.P.; Taylor, B.K. Navigation by magnetic signatures in a realistic model of Earth’s magnetic field. Bioinspiration Biomim. 2024, 19, 036006. [Google Scholar] [CrossRef]
- Hinton, G.; Deng, L.; Yu, D.; Dahl, G.E.; Kingsbury, B. Deep Neural Networks for Acoustic Modeling in Speech Recognition: The Shared Views of Four Research Groups. ISPM 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 84–90. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, K.; Zhang, Q.; Liu, Z.; Chen, D.; Pan, M.; Hu, J.; Xu, Y. Geomagnetic Vector Pattern Recognition Navigation Method Based on Probabilistic Neural Network. IEEE Trans Geosci Remote Sens 2023, 61, 1–8. [Google Scholar] [CrossRef]
- Ma, X.; Zhang, J.; Li, T. Geomagnetic reference map super-resolution using convolutional neural network. Meas. Sci. Technol. 2024, 35, 015014. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1994. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Alken, P.; Erwan, T.; Beggan, C.D.; Amit, H.; Aubert, J.; Baerenzung, J.; Bondar, T.N.; Brown, W.; Califf, S.; Chambout, A.; et al. International Geomagnetic Reference Field: The thirteenth generation. Earth Planets Space 2020, 73, 49. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal-to-Noise Ratio | RMSE | ||
|---|---|---|---|
| (μT) | (°) | (°) | |
| 40 dB | 0.4038 | 0.9767 | 0.4821 |
| 30 dB | 1.2564 | 3.5137 | 1.5509 |
| 20 dB | 3.6719 | 11.0137 | 5.0793 |
| 10 dB | 9.6884 | 28.4564 | 16.1390 |
| Type of Position Error | RMSE | ||
|---|---|---|---|
| (μT) | (°) | (°) | |
| = 0, = −0.04 mm | 0.2453 | 0.1258 | 0.4803 |
| = −0.04 mm, = 0 | 0.0019 | 0.0016 | 0.0016 |
| = 0, = 0.04 mm | 0.2451 | 0.1259 | 0.4806 |
| = 0.04 mm, = 0 | 0.0008 | 0.0006 | 0.0014 |
| = 1° | 0.1653 | 0.0511 | 0.3166 |
| = −1° | 0.1646 | 0.0510 | 0.3168 |
| Sensor Number for Installation Error | Maximum Value of RMSE | ||
|---|---|---|---|
| (nT) | (″) | (″) | |
| 0 | 0.0102 | 0.1298 | 0.0521 |
| 1 | 0.0170 | 0.1157 | 0.0702 |
| 2 | 0.0130 | 0.1229 | 0.0468 |
| 3 | 0.0093 | 0.1549 | 0.0460 |
| 4 | 0.0065 | 0.1671 | 0.0303 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Tang, R.; Wang, Q.; Song, T. Performance Evaluation of a Bioinspired Geomagnetic Sensor and Its Application for Geomagnetic Navigation in Simulated Environment. Sensors 2024, 24, 6477. https://doi.org/10.3390/s24196477
Shi H, Tang R, Wang Q, Song T. Performance Evaluation of a Bioinspired Geomagnetic Sensor and Its Application for Geomagnetic Navigation in Simulated Environment. Sensors. 2024; 24(19):6477. https://doi.org/10.3390/s24196477
Chicago/Turabian StyleShi, Hongkai, Ruiqi Tang, Qingmeng Wang, and Tao Song. 2024. "Performance Evaluation of a Bioinspired Geomagnetic Sensor and Its Application for Geomagnetic Navigation in Simulated Environment" Sensors 24, no. 19: 6477. https://doi.org/10.3390/s24196477