
Zigbee-Based Wireless Sensor Network of MEMS Accelerometers for Pavement Monitoring †
 , , ,
, , ,  and
and 
Abstract
1. Introduction
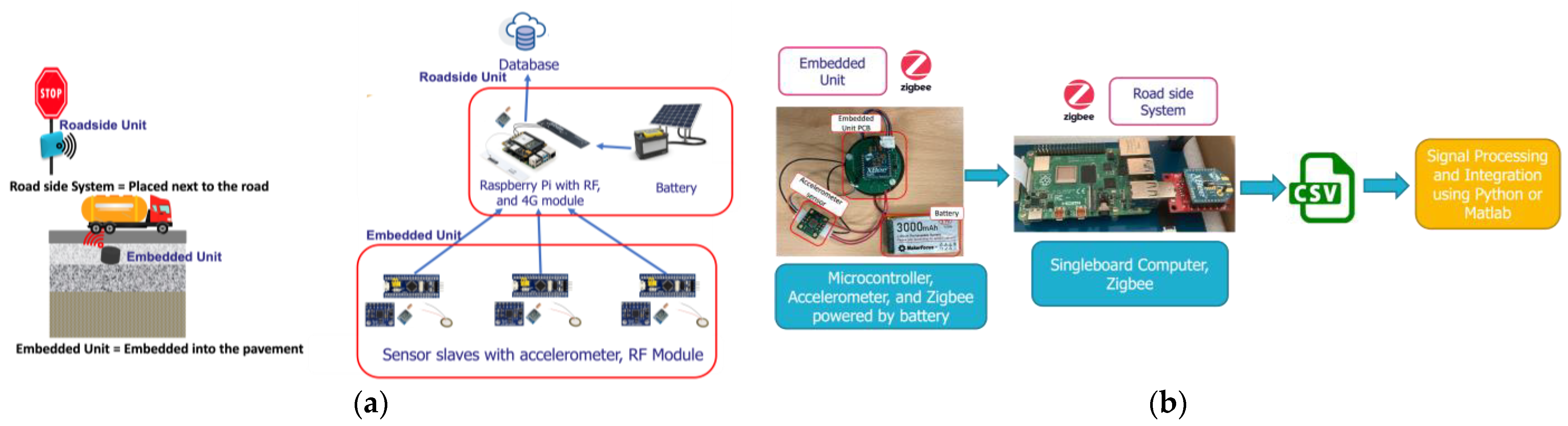
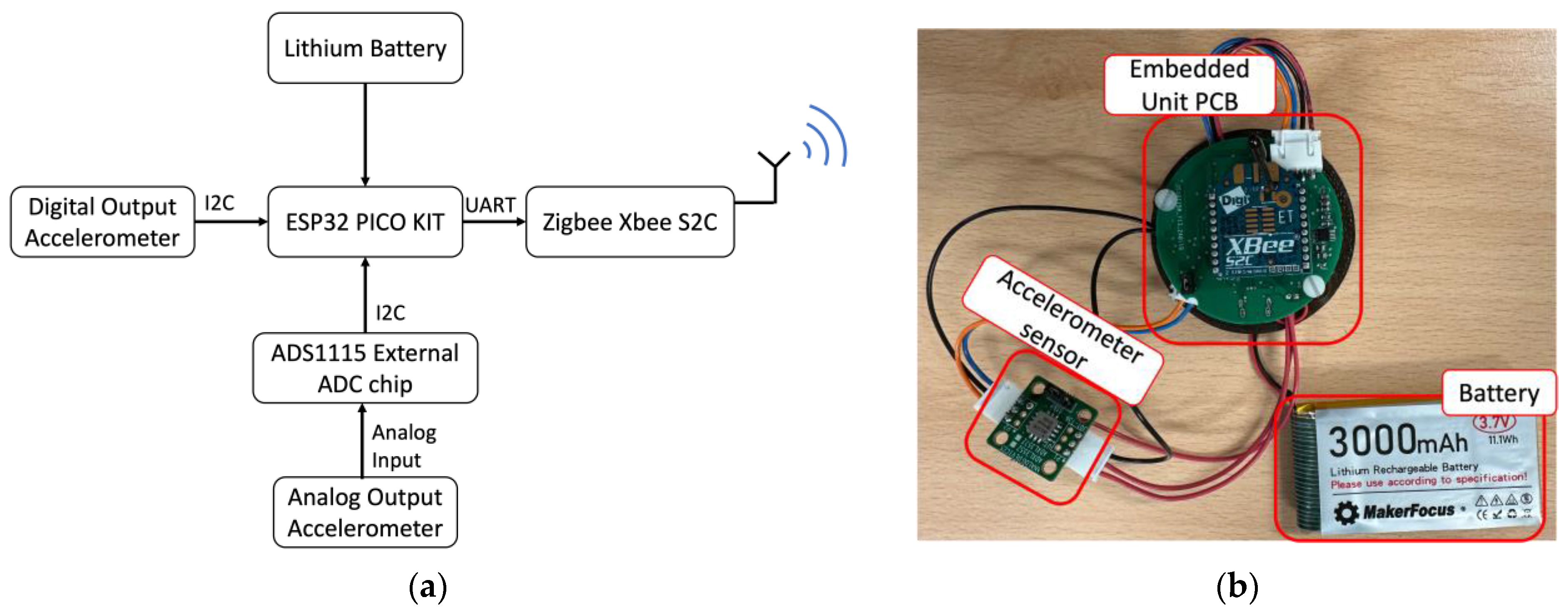
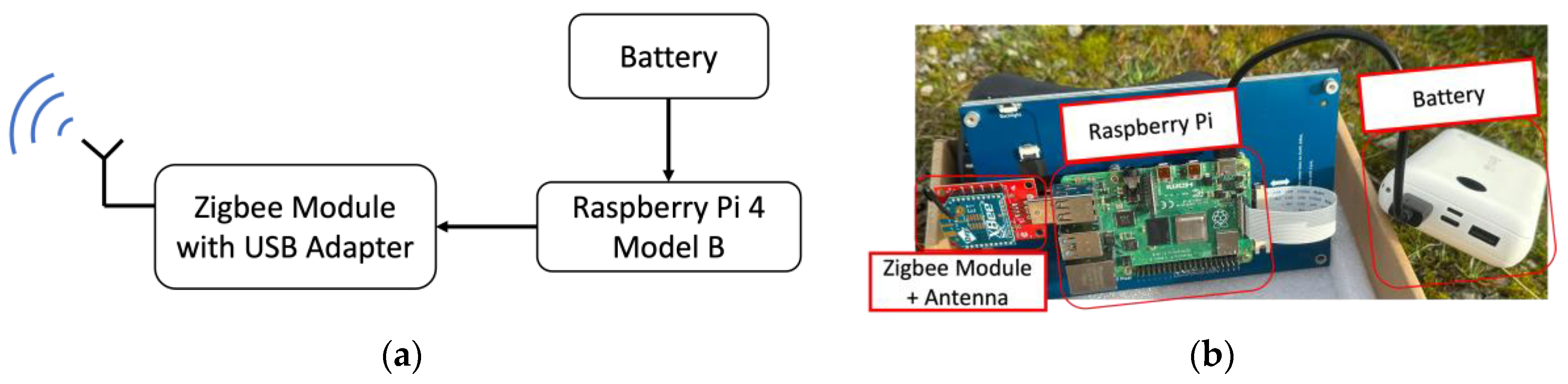
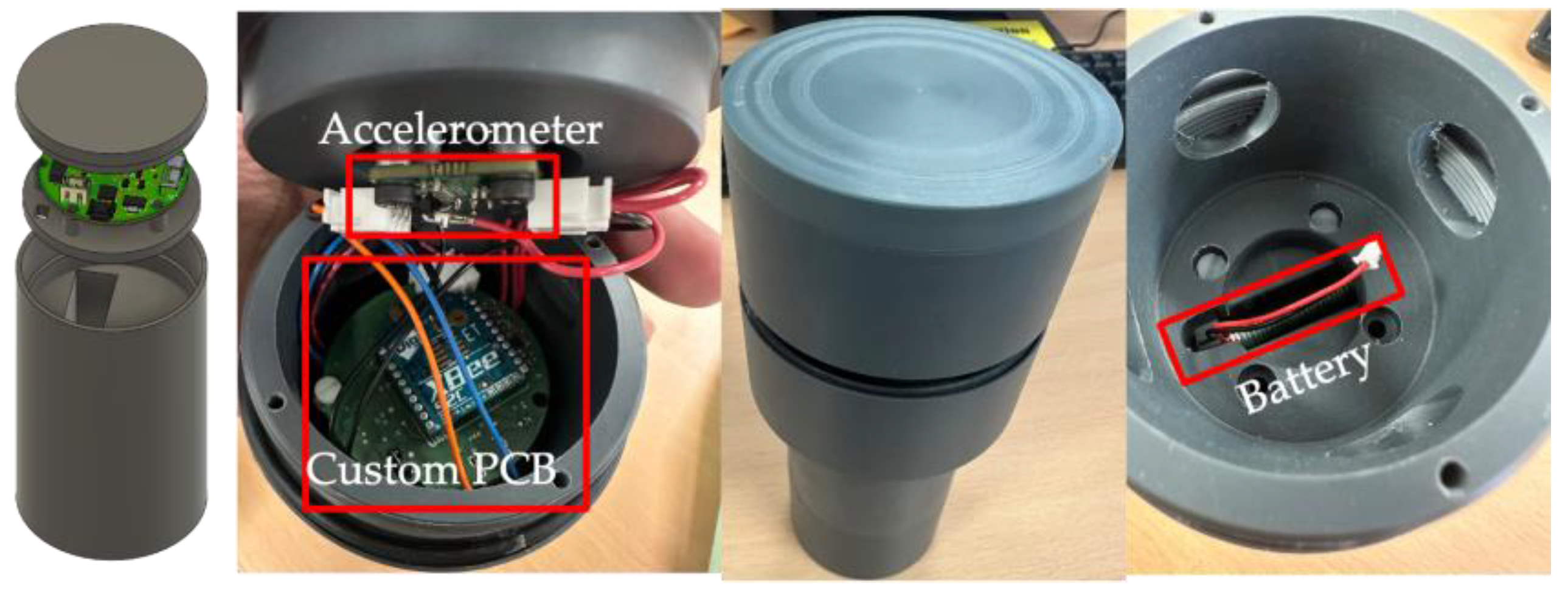
2. System Architecture
3. Laboratory Tests with Vibrating Pot and Vibrating Table
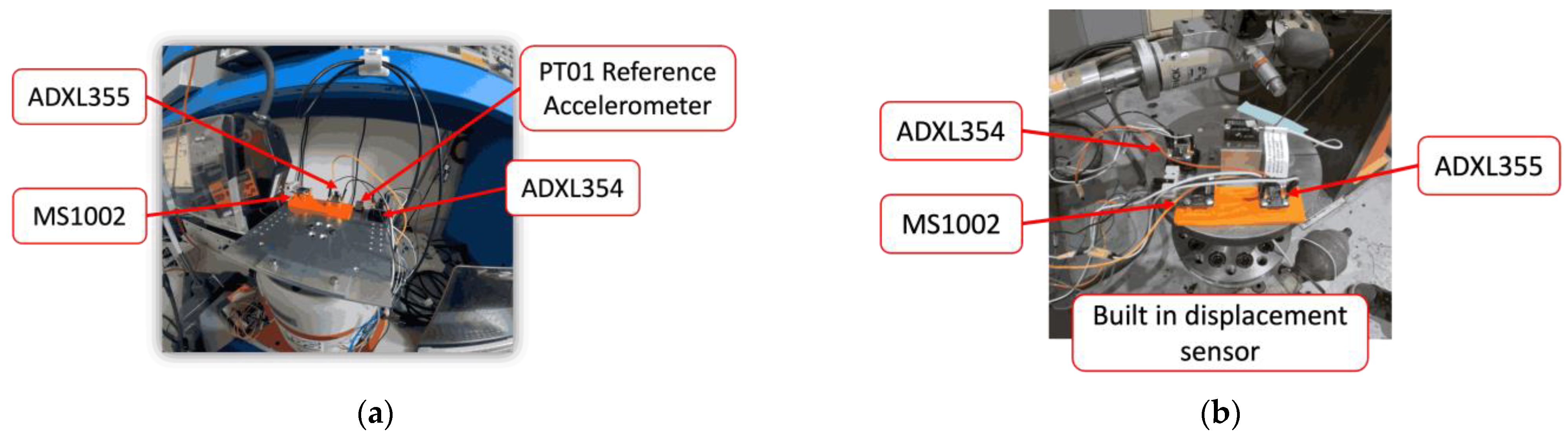
3.1. Description of the Setups
3.2. Results Obtained with the Vibrating Pot
3.3. Results Obtained with the Vibrating Table
3.3.1. Signal Processing
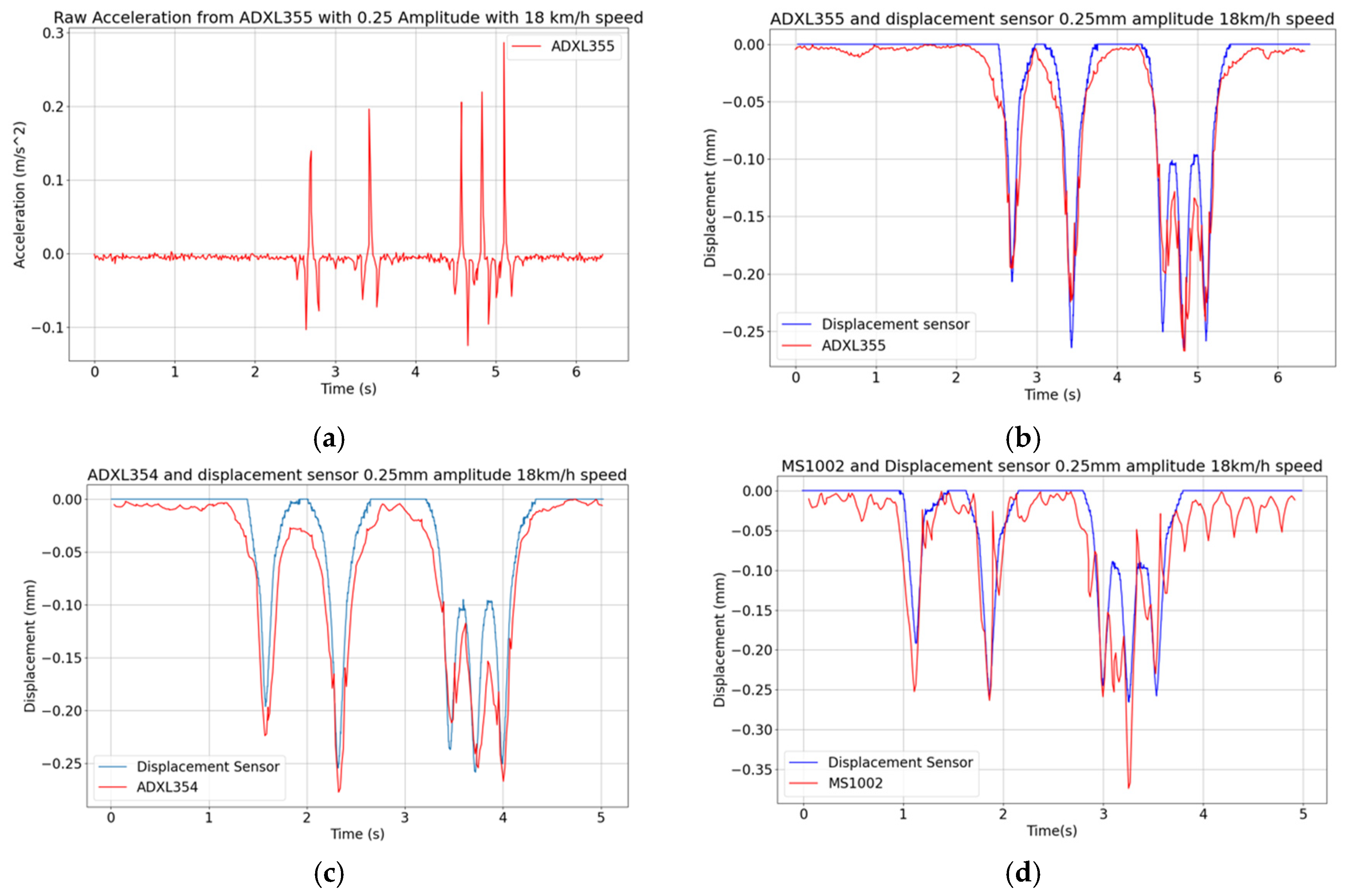
3.3.2. Tests at Varying Displacement Peaks
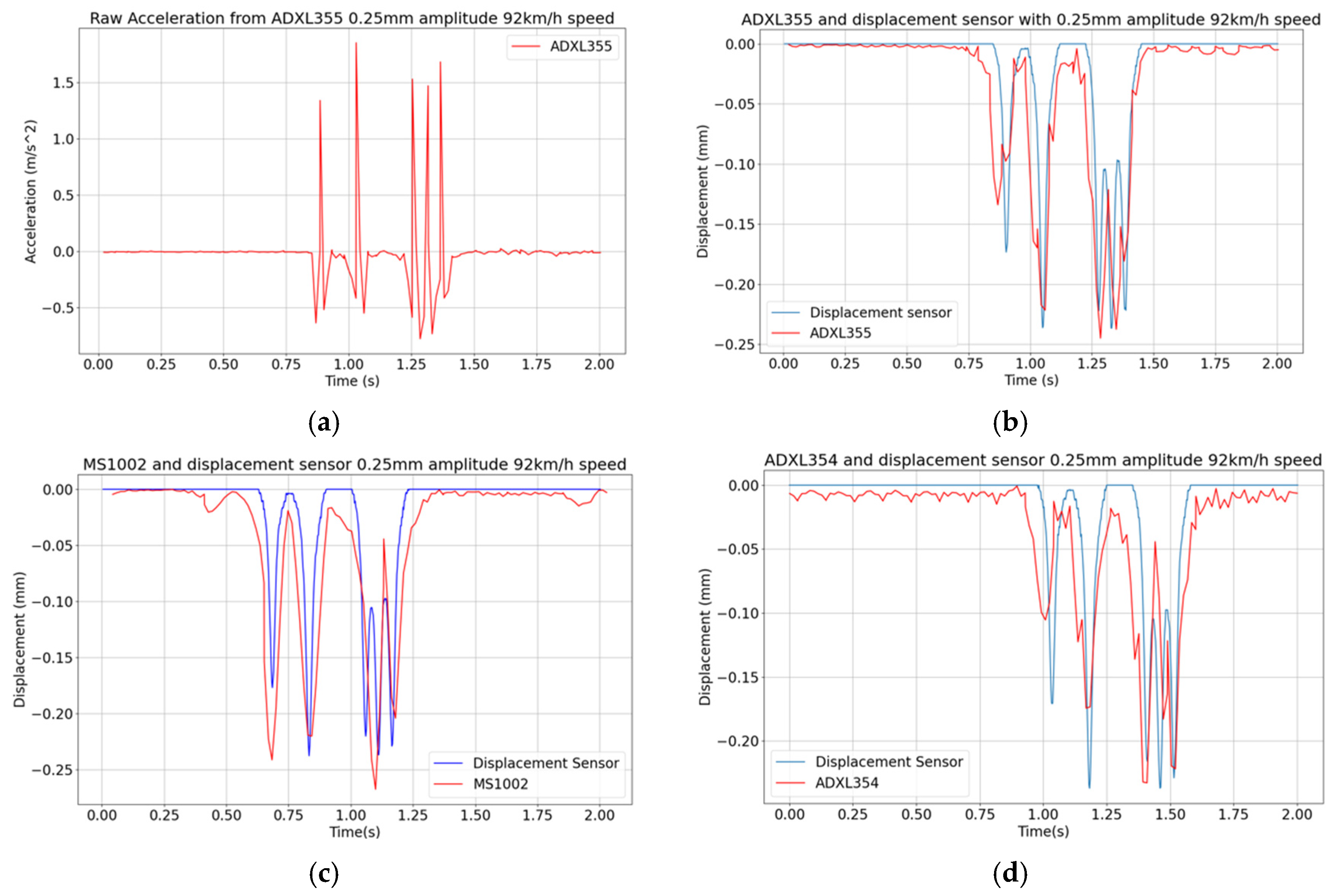
3.3.3. Tests at Varying Vehicle Speed
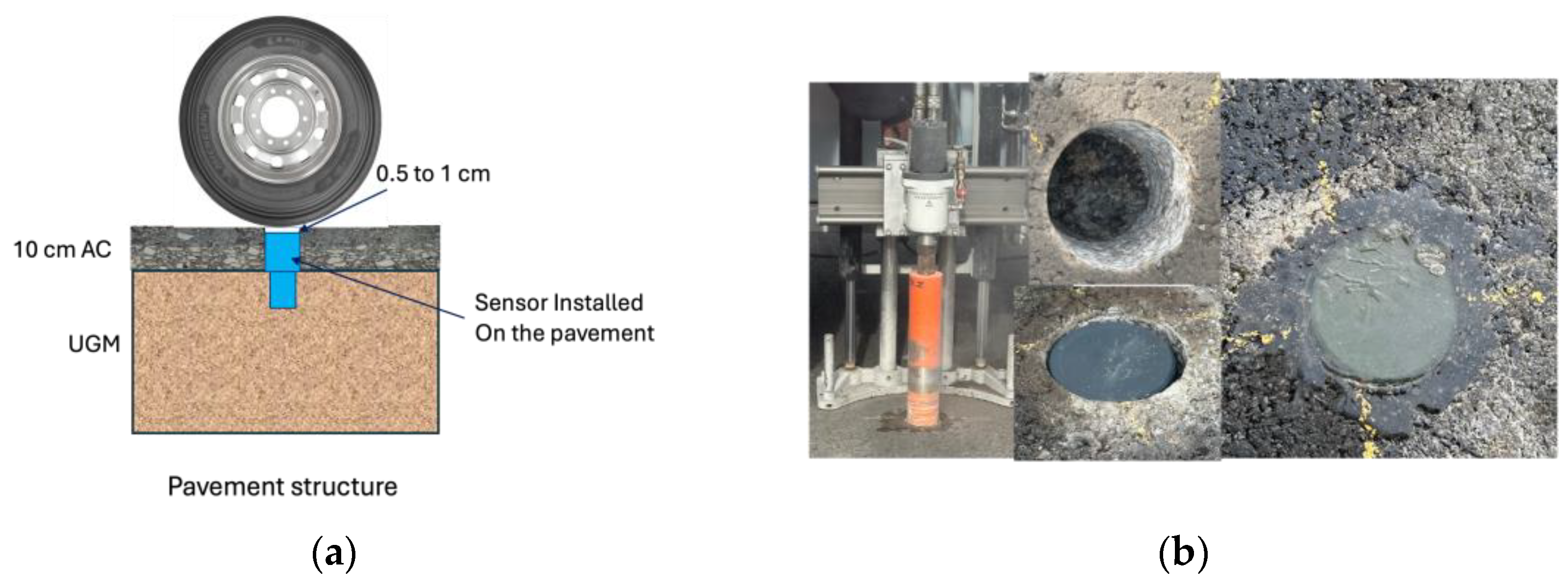
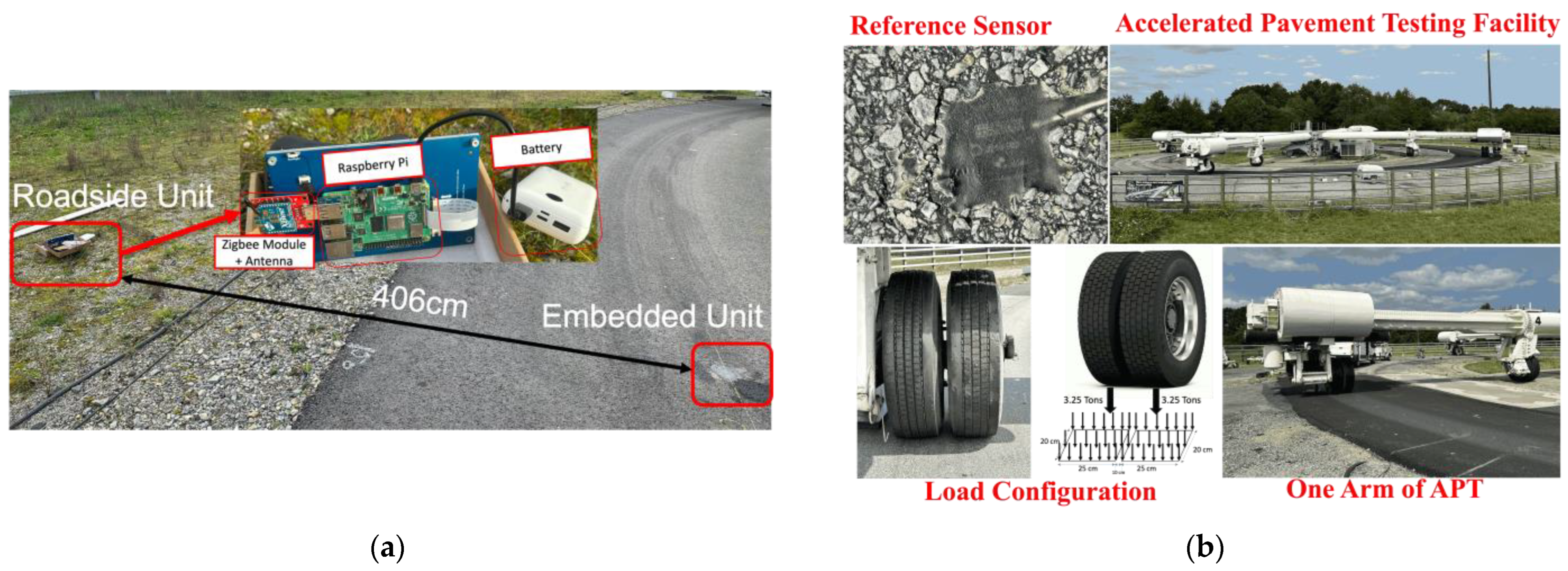
4. Preliminary Tests on a Real Pavement
4.1. Experimental Setup
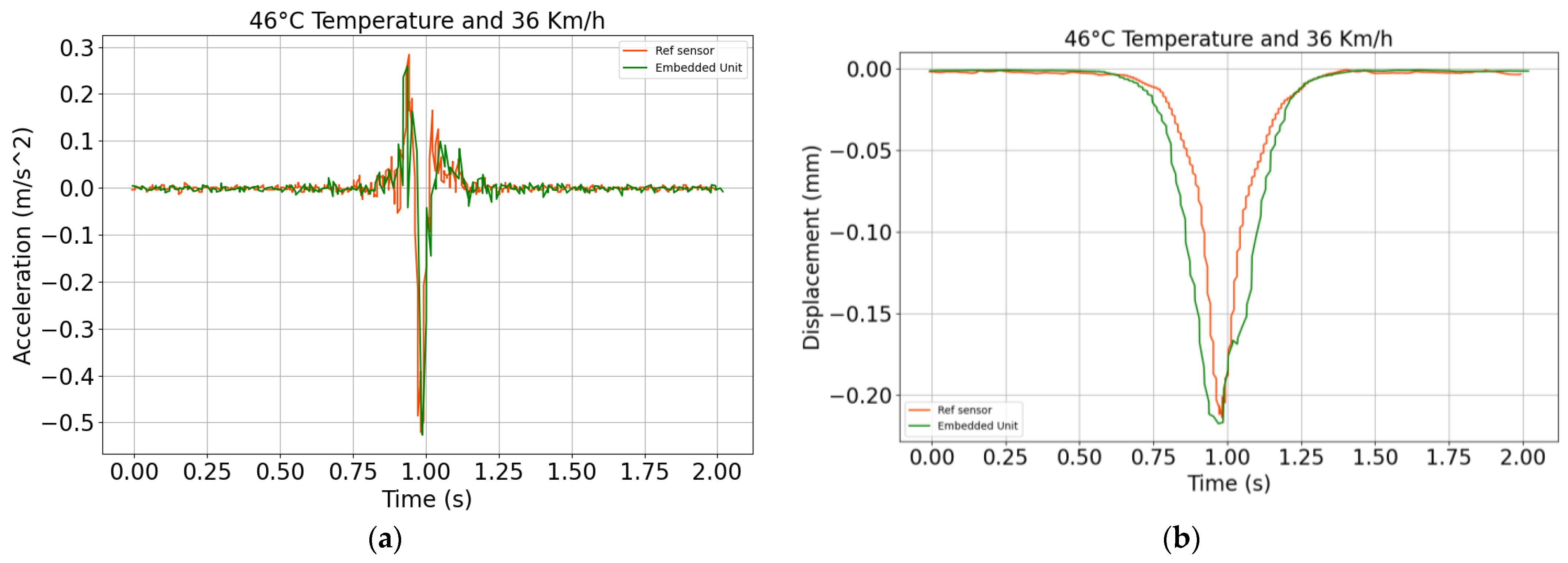
4.2. Test Results
5. Comparison with Setups Available in the Literature
6. Conclusions
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bajwa, R.; Coleri, E.; Rajagopal, R.; Varaiya, P.; Flores, C. Development of a Cost Effective Wireless Vibration Weigh-In-Motion System to Estimate Axle Weights of Trucks. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 443–457. [Google Scholar] [CrossRef]
- Gillot, C.; Picoux, B.; Reynaud, P.; da Silva, D.C.; Rakotovao-Ravahatra, N.; Feix, N.; Petit, C. Wireless Strain Gauge for Monitoring Bituminous Pavements. Appl. Sci. 2024, 14, 2245. [Google Scholar] [CrossRef]
- Duong, N.S.; Blanc, J.; Hornych, P.; Bouveret, B.; Carroget, J.; Lefeuvre, Y. Continuous strain monitoring of an instrumented pavement section. Int. J. Pavement Eng. 2018, 20, 1435–1450. [Google Scholar] [CrossRef]
- Xue, W.; Wang, L.; Wang, D. A prototype integrated monitoring system for pavement and traffic based on an embedded sensing network. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1380–1390. [Google Scholar] [CrossRef]
- Bekiroglu, K.; Tekeoglu, A.; Shen, J.; Boz, I. Low-Cost Internet of Things Based Real- Time Pavement Monitoring System. In Proceedings of the 2021 IEEE International Conferences on Internet of Things (iThings) and IEEE Green Computing & Communications (GreenCom) and IEEE Cyber, Physical & Social Computing (CPSCom) and IEEE Smart Data (SmartData) and IEEE Congress on Cybermatics (Cybermatics), Melbourne, Australia, 6–8 December 2021; pp. 17–22. [Google Scholar] [CrossRef]
- Bahrani, N.; Blanc, J.; Hornych, P.; Menant, F. Alternate method of pavement assessment using geophones and accelerometers for measuring the pavement response. Infrastructures 2020, 5, 25. [Google Scholar] [CrossRef]
- Liu, P.; Otto, F.; Wang, D.; Oeser, M.; Balck, H. Measurement and evaluation on deterioration of asphalt pavements by geophones. Measurement 2017, 109, 223–232. [Google Scholar] [CrossRef]
- Ye, Z.; Yan, G.; Wei, Y.; Zhou, B.; Li, N.; Shen, S.; Wang, L. Real-time and efficient traffic information acquisition via pavement vibration iot monitoring system. Sensors 2021, 21, 2679. [Google Scholar] [CrossRef] [PubMed]
- Bajwa, R.; Coleri, E.; Rajagopal, R.; Varaiya, P.; Flores, C. Pavement performance assessment using a cost-effective wireless accelerometer system. Comput. Civ. Infrastruct. Eng. 2020, 35, 1009–1022. [Google Scholar] [CrossRef]
- Ye, Z.; Xiong, H.; Wang, L. Collecting comprehensive traffic information using pavement vibration monitoring data. Comput. Civ. Infrastruct. Eng. 2020, 35, 134–149. [Google Scholar] [CrossRef]
- Ho, C.-H.; Snyder, M.; Zhang, D. Application of Vehicle-Based Sensing Technology in Monitoring Vibration Response of Pavement Conditions. J. Transp. Eng. Part B Pavements 2020, 146, 04020053. [Google Scholar] [CrossRef]
- Ryynänen, T.; Pellinen, T.; Belt, J. The use of accelerometers in the pavement performance monitoring and analysis. IOP Conf. Ser. Mater. Sci. Eng. 2010, 10, 012110. [Google Scholar] [CrossRef]
- Bajwa, R.; Rajagopal, R.; Coleri, E.; Varaiya, P.; Flores, C. In-pavement wireless weigh-in-motion. In Proceedings of the IPSN 2013—Proceedings of the 12th International Conference on Information Processing in Sensor Networks, Part of CPSWeek 2013, Philadelphia, PA, USA, 8–11 April 2013; pp. 103–114. [Google Scholar] [CrossRef]
- Bajwa, R.; Rajagopal, R.; Varaiya, P.; Kavaler, R. In Pavement Wireless Sensor Network for Vehicle Classification. In Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, IPSN ’11, Chicago, IL, USA, 12–14 April 2011; Association for Computing Machinery: New York, NY, USA, 2011. [Google Scholar]
- Ye, Z.; Wei, Y.; Li, J.; Yan, G.; Wang, L. A distributed pavement monitoring system based on Internet of Things. J. Traffic Transp. Eng. (Engl. Ed.) 2022, 9, 305–317. [Google Scholar] [CrossRef]
- Losa, M.; Papagiannakis, A.T. Sustainability, Eco-Efficiency, and Conservation in Transportation Infrastructure Asset Management; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Prabatama, N.A.; Hornych, P.; Mariani, S.; Laheurte, J.M. Development of a Zigbee-Based Wireless Sensor Network of MEMS Accelerometers for Pavement Monitoring. Eng. Proc. 2023, 58, 29. [Google Scholar] [CrossRef]
- Bahrani, N.; Blanc, J.; Hornych, P.; Menant, F.; Padilla, L. Continuous remote monitoring of a motorway section using geophones. Transp. Eng. 2023, 12, 100177. [Google Scholar] [CrossRef]
- Heavy Goods Vehicles (Over 3.5 t)—Standard Speeds Limits in Europe. Available online: https://trip.studentnews.eu/s/4086/77068-Heavy-goods-vehicles-over-35-t-standard-speeds-limits-in-Europe.htm (accessed on 1 October 2024).
- List of Truck Speed Limits for All Countries in Europe. Available online: https://promods.net/viewtopic.php?t=18254#:~:text=Normal%20cargo%3A,sign)%3A%2050%20km%2Fh (accessed on 1 October 2024).
- Truck Speed Limits in Europe—How Fast to Drive in Each Country. Available online: https://dhl-freight-connections.com/en/business/truck-speed-limits-europe/ (accessed on 1 October 2024).
- Stipdonk, H.; Adminaite-Fodor, D.; Jost, G. PIN Flash Report 36 Reducing Speeding in Europe; ETSC: Etterbeek, Belgium, 2019. [Google Scholar]
- Ye, Z.; Wei, Y.; Yang, B.; Wang, L. Performance Testing of Micro-Electromechanical Acceleration Sensors for Pavement Vibration Monitoring. Micromachines 2023, 14, 153. [Google Scholar] [CrossRef] [PubMed]
- Devices. Figure 1. ADXL354 Functional Block Diagram Figure 2. ADXL355 Functional Block Diagram GENERAL DESCRIPTION. Available online: https://www.analog.com (accessed on 5 September 2024).
- Prabatama, N.A.; Nguyen, M.L.; Hornych, P.; Mariani, S.; Laheurte, J.M. Pavement Monitoring with a Wireless Sensor Network of MEMS Accelerometers. In Proceedings of the 2024 IEEE International Symposium on Measurements & Networking (M&N), Rome, Italy, 2–5 July 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Lyons, R.G. Understanding Digital Signal Processing, 3rd ed.; Pearson: Hoboken, NJ, USA, 1997. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer Type | ADXL355 | ADXL354 | MS1002 |
|---|---|---|---|
| Output | Digital Output | Analog Output | Differential Analog Output |
| Sensitivity | 256 LSB/g [24] | 384 mV/g | 1340 mV/g |
| Power Consumption | 201.0 μA | 155.2 μA | 12.11 mA |
| Communication method | I2C | Analog Input of ADS1115 ADC | Analog Input of ADS1115 ADC |
| Sampling Frequency | 80 Hz | 70 Hz | 70 Hz |
| Noise | 0.0024 m/s2 | 0.0022 m/s2 | 0.0076 m/s2 |
| Sensor | 0.25 mm Peak | 0.5 mm Peak | ||
|---|---|---|---|---|
| EI | Peak EI | EI | Peak EI | |
| MS1002A | 3.3% | 4.4% | 8.7% | 6.4% |
| ADXL354 | 4.5% | 12.8% | 8.9% | 15.5% |
| ADXL355 | 3.8% | 5.6% | 7.7% | 4.6% |
| Sensor | 18 km/h Speed | 92 km/h Speed | ||
|---|---|---|---|---|
| EI | Peak EI | EI | Peak EI | |
| MS1002 | 14.2% | 16.6% | 13.1% | 22.2% |
| ADXL354 | 10.6% | 7.7% | 9.4% | 8.0% |
| ADXL355 | 12.0% | 3.5% | 8.1% | 7.2% |
| Parameters | Proposed System | [4] | [1] |
|---|---|---|---|
| Cost | USD 215 | USD 19,140 | USD 23,500 |
| Sensor Communication with acquisition unit | Zigbee Xbee S2C wireless communication module | Cable | Wireless RF transceiver CC2420 |
| Parameters Measured | Acceleration from pavement vibration converted into pavement displacement | Asphalt Strain Response | Acceleration from pavement vibration |
| Sensor Used | ADXL355 | Vertical and Horizontal Strain Gage, and Load Cell | MS9002.D MEMS Accelerometers |
| Acquisition Unit | Raspberry Pi 4 | V-Link Wireless Voltage Nodes | Wireless access point |
| Advantages | Offering the Lowest cost. Fully wireless for sensor data acquisition. Signal Processing happens in the roadside unit. | Wireless communication with the base station | High data rate with 512 Hz. Better lifetime and power consumption. Wireless firmware update. |
| Drawbacks | Battery powered with limited device lifetime. | Cables to connect the sensor to the roadside unit. Cost is still high. | High cost. Data extraction required to process data. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prabatama, N.A.; Nguyen, M.L.; Hornych, P.; Mariani, S.; Laheurte, J.-M. Zigbee-Based Wireless Sensor Network of MEMS Accelerometers for Pavement Monitoring. Sensors 2024, 24, 6487. https://doi.org/10.3390/s24196487
Prabatama NA, Nguyen ML, Hornych P, Mariani S, Laheurte J-M. Zigbee-Based Wireless Sensor Network of MEMS Accelerometers for Pavement Monitoring. Sensors. 2024; 24(19):6487. https://doi.org/10.3390/s24196487
Chicago/Turabian StylePrabatama, Nicky Andre, Mai Lan Nguyen, Pierre Hornych, Stefano Mariani, and Jean-Marc Laheurte. 2024. "Zigbee-Based Wireless Sensor Network of MEMS Accelerometers for Pavement Monitoring" Sensors 24, no. 19: 6487. https://doi.org/10.3390/s24196487
APA StylePrabatama, N. A., Nguyen, M. L., Hornych, P., Mariani, S., & Laheurte, J.-M. (2024). Zigbee-Based Wireless Sensor Network of MEMS Accelerometers for Pavement Monitoring. Sensors, 24(19), 6487. https://doi.org/10.3390/s24196487