

A Calculation Method of Bearing Balls Rotational Vectors Based on Binocular Vision Three-Dimensional Coordinates Measurement

Abstract
1. Introduction
2. Proposed Theories and Methods
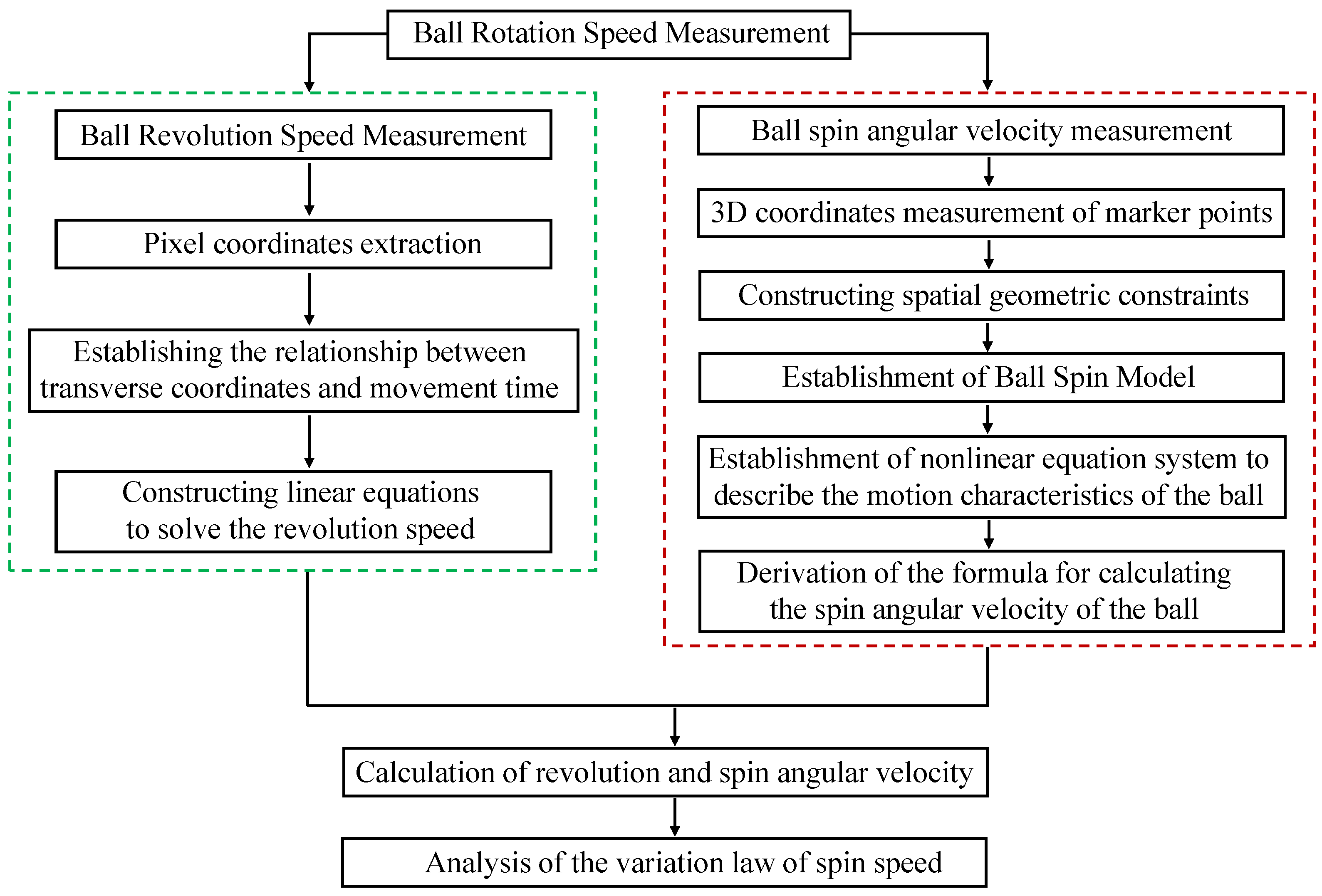
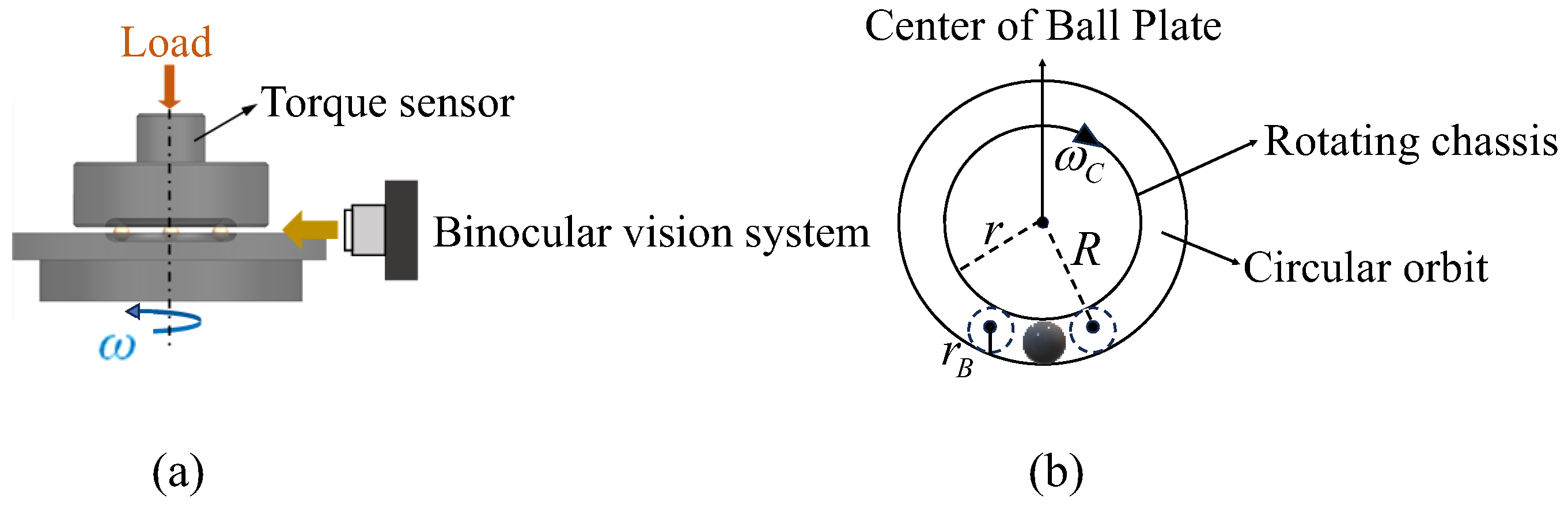
2.1. Overview of the Principle of Ball Rotational Speed Measurement
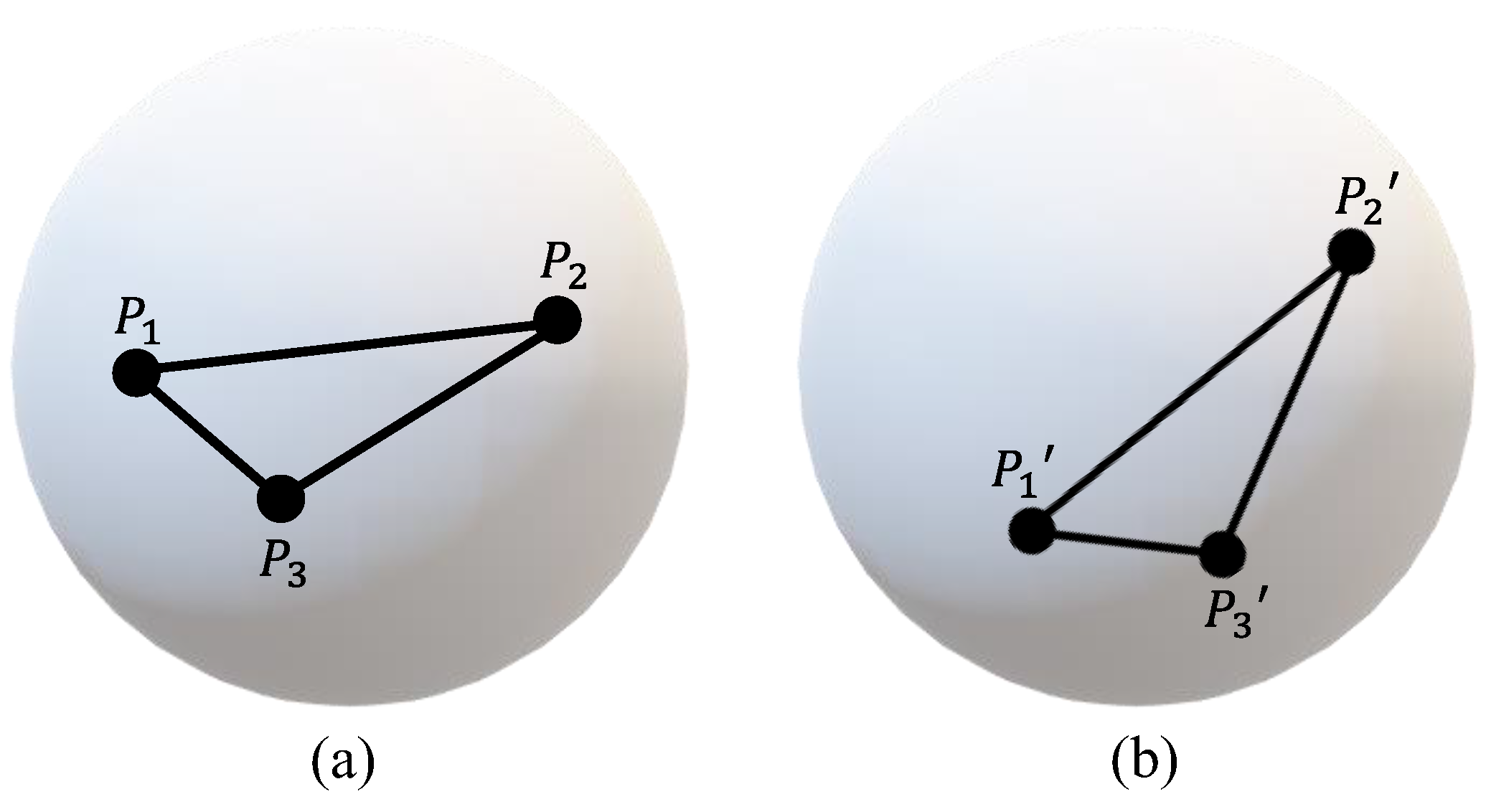
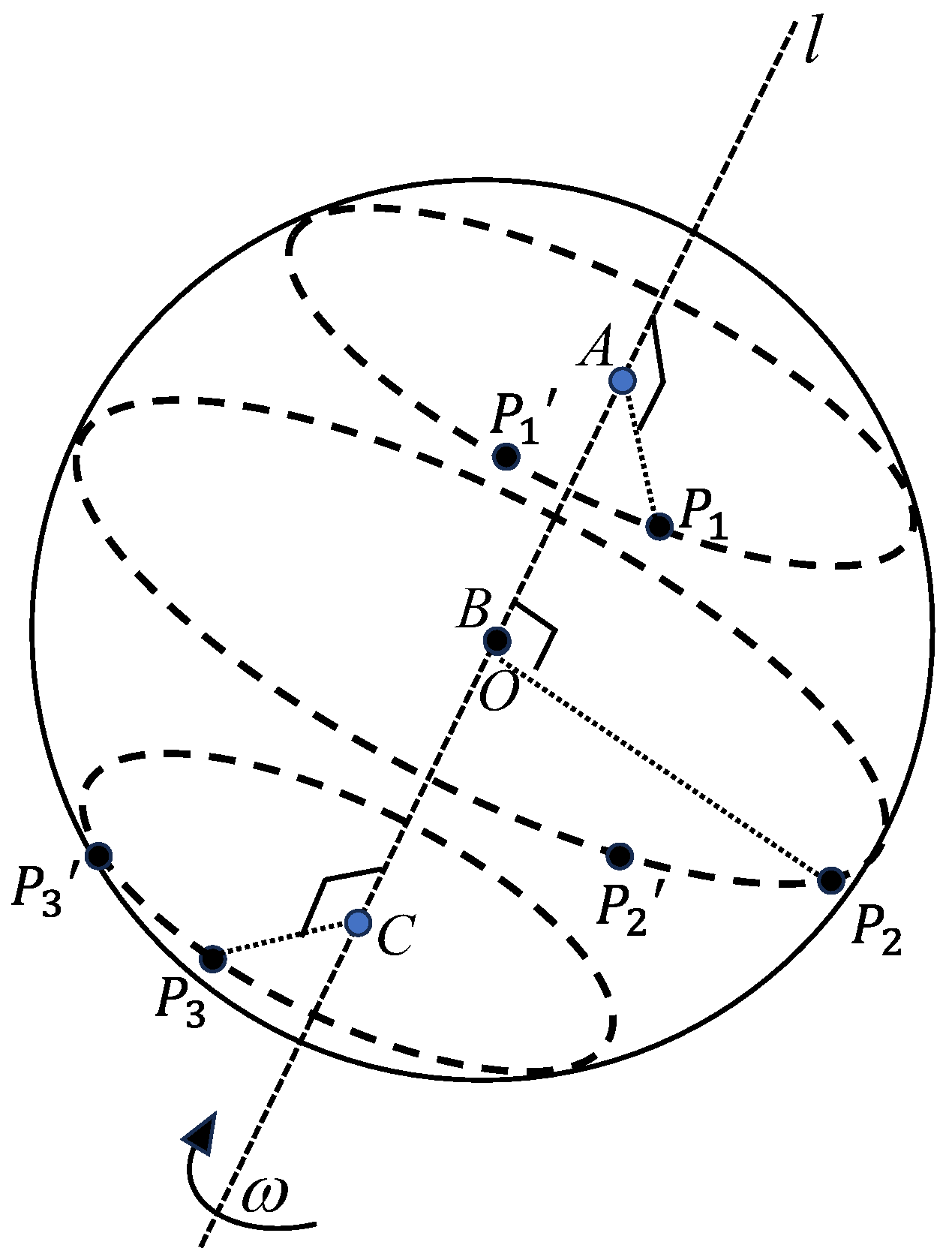
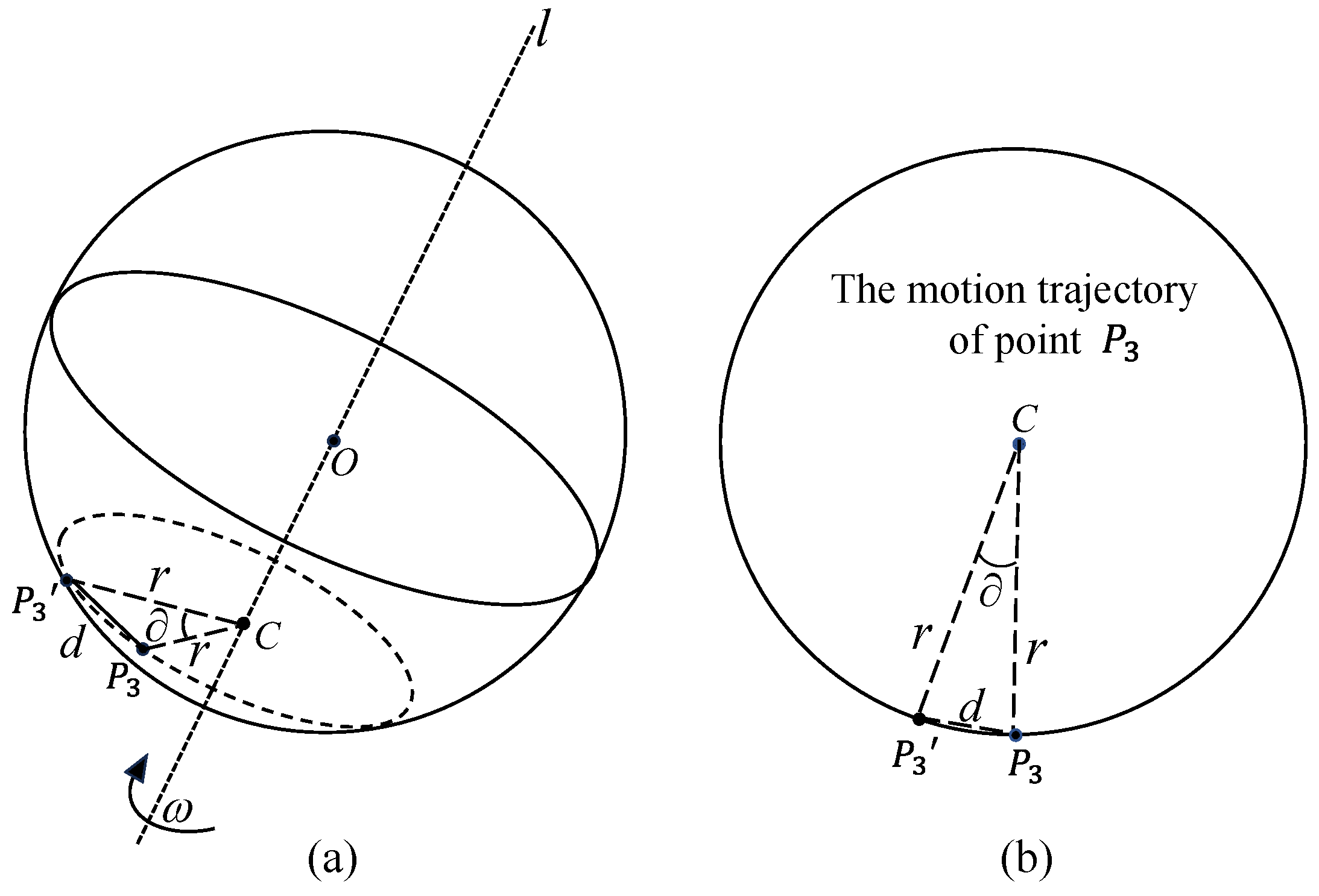
2.2. Proposed Ball Spin Measurement Principle
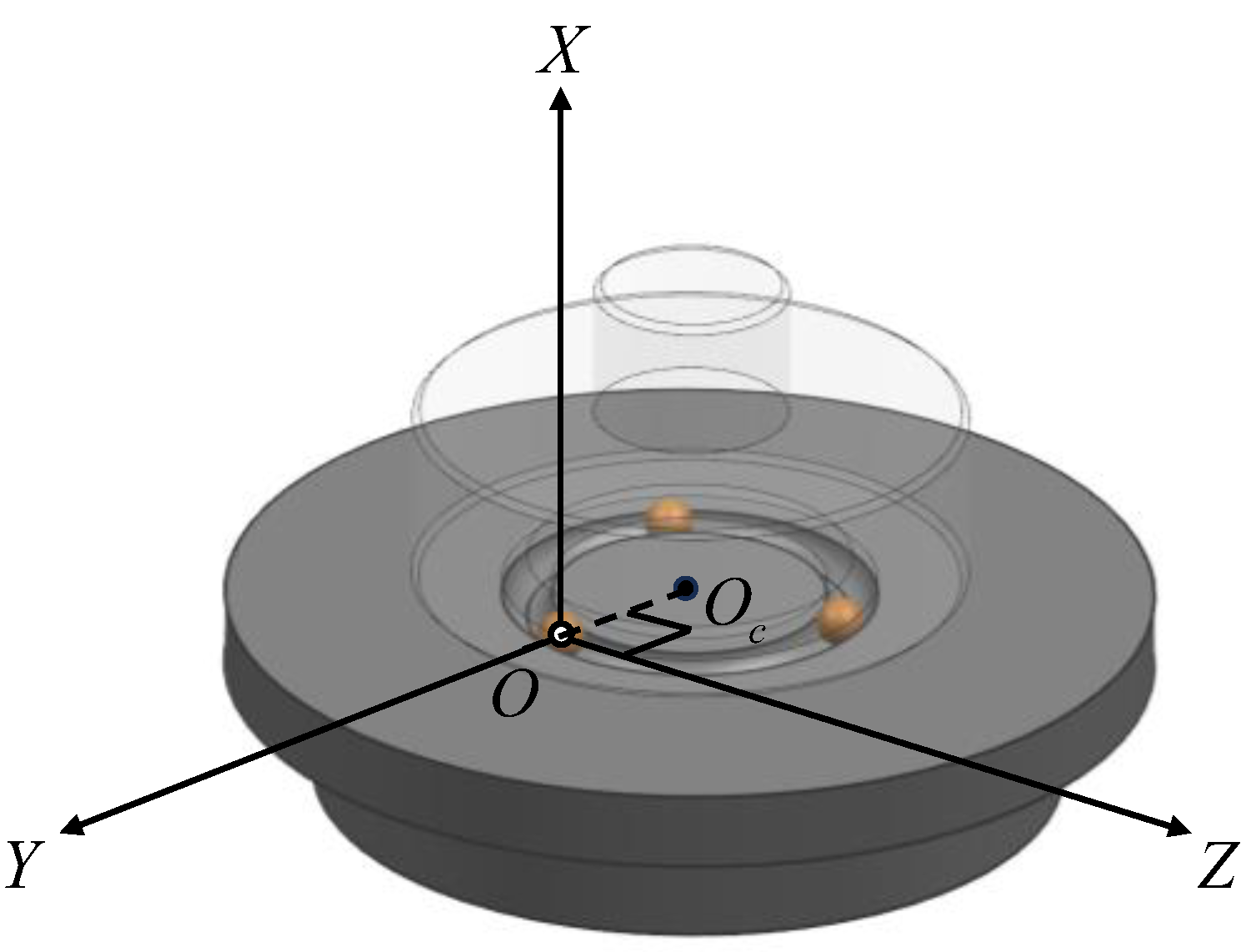
2.3. Ball Revolution Speed Measurement Principle

3. Experimental Measurement of the Proposed Method
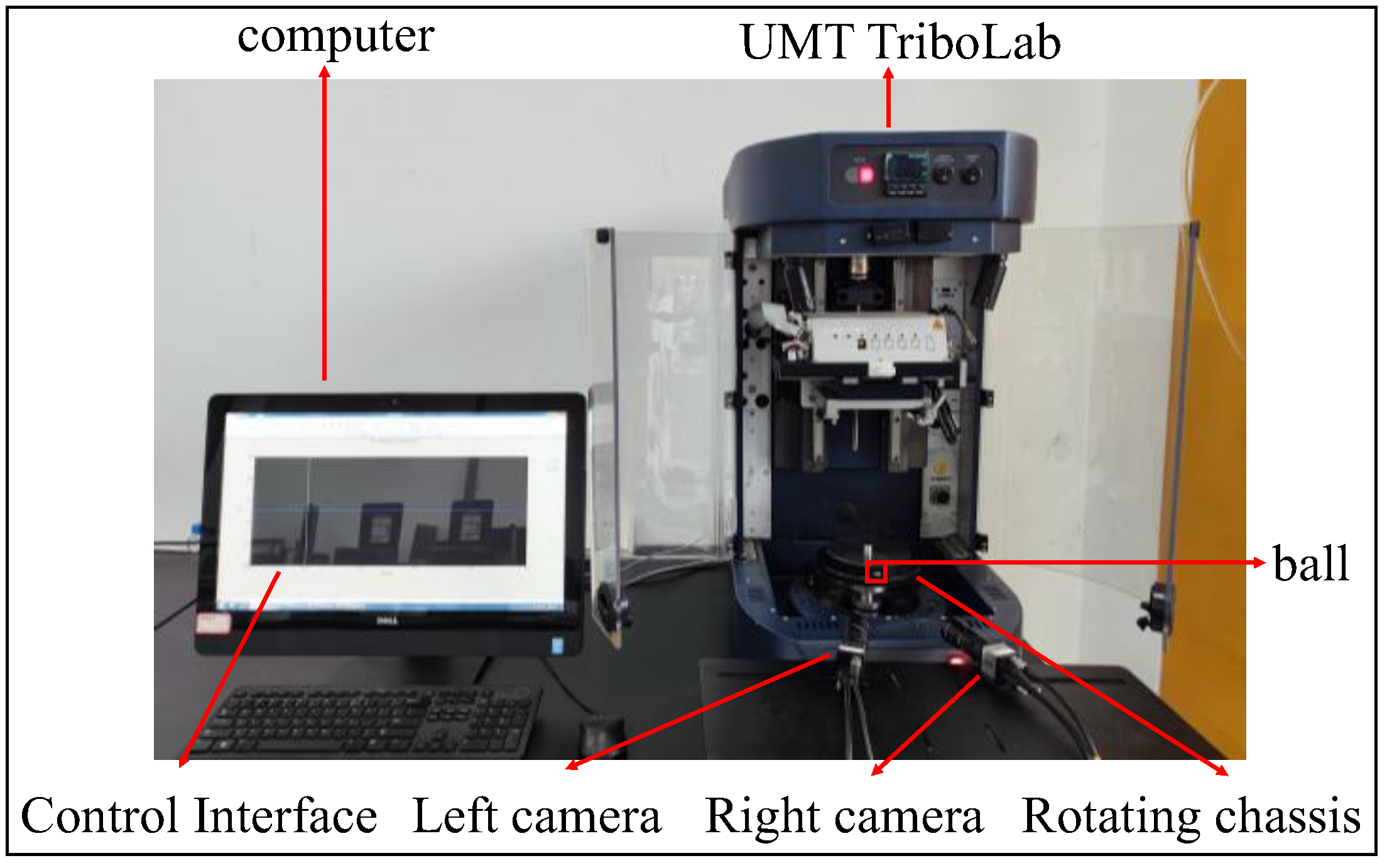
3.1. Experimental Environment Setting
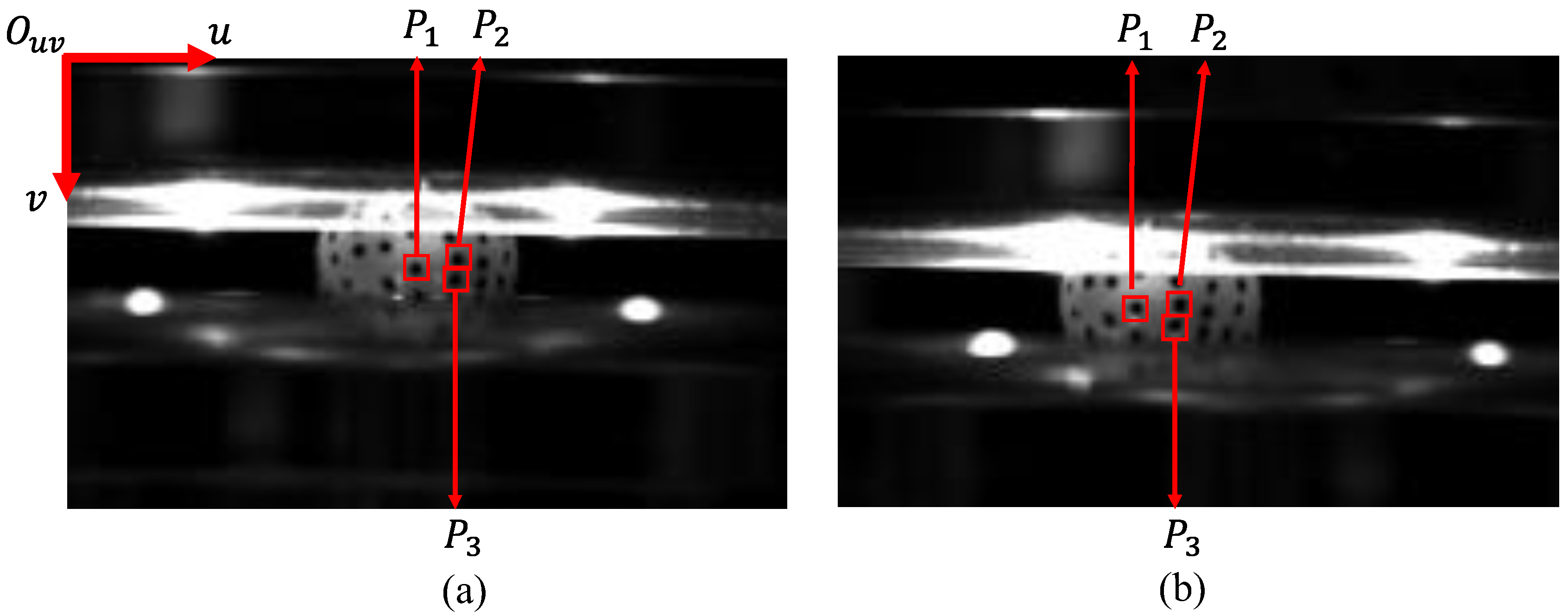
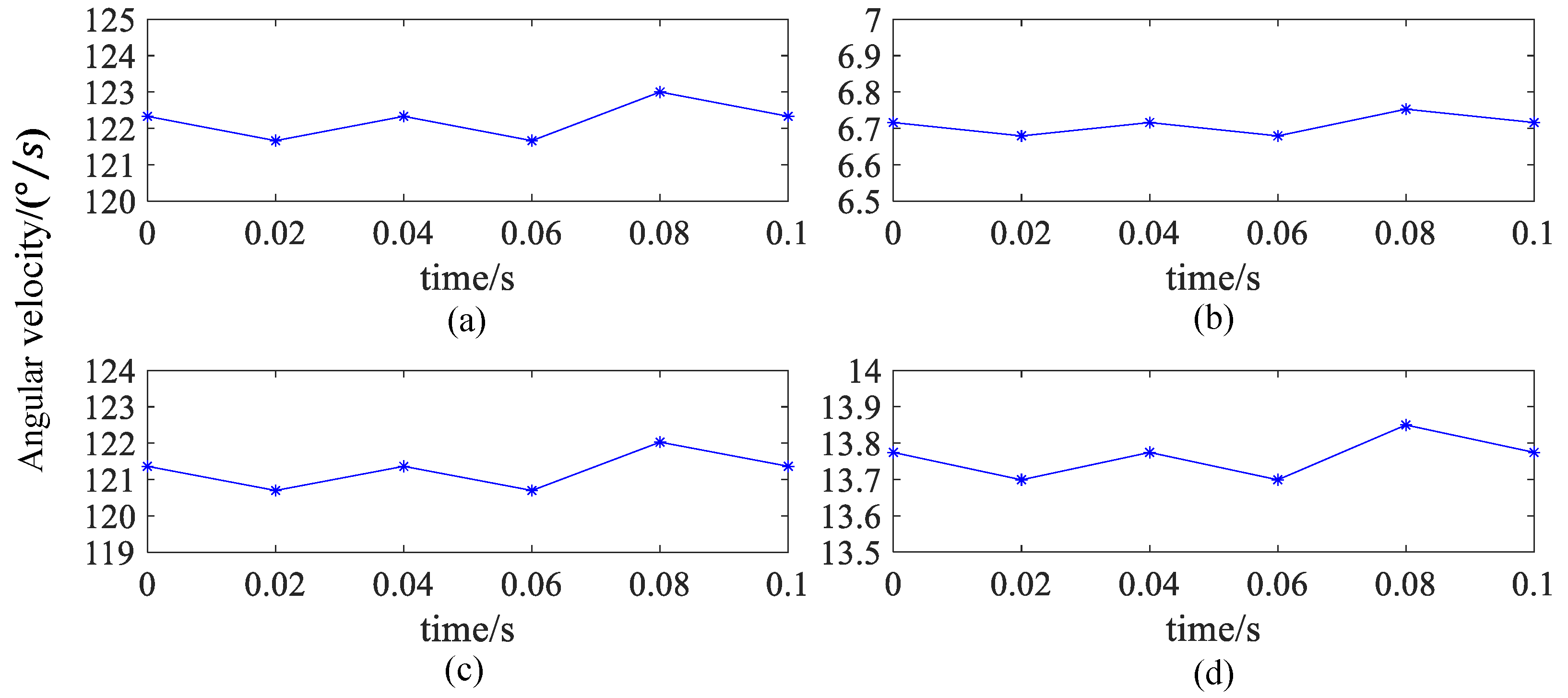
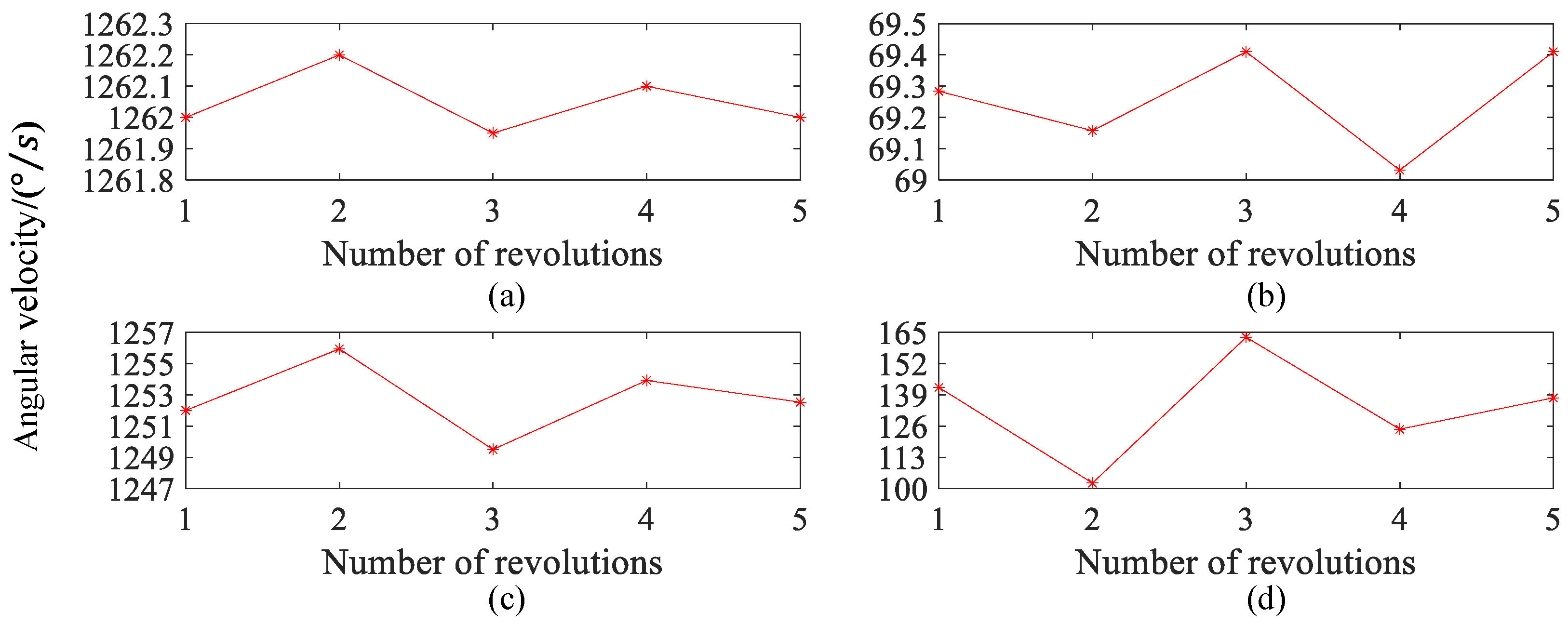
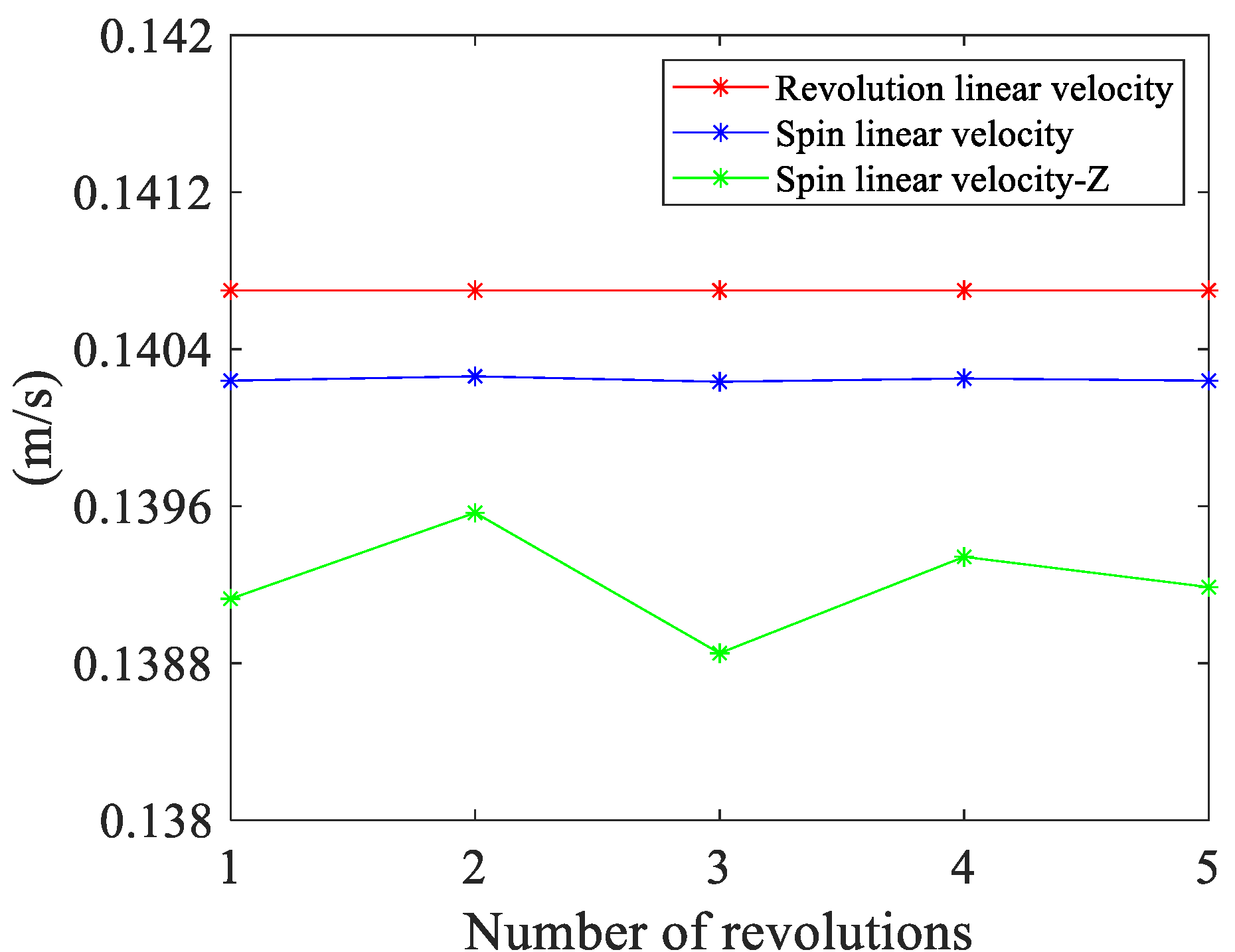
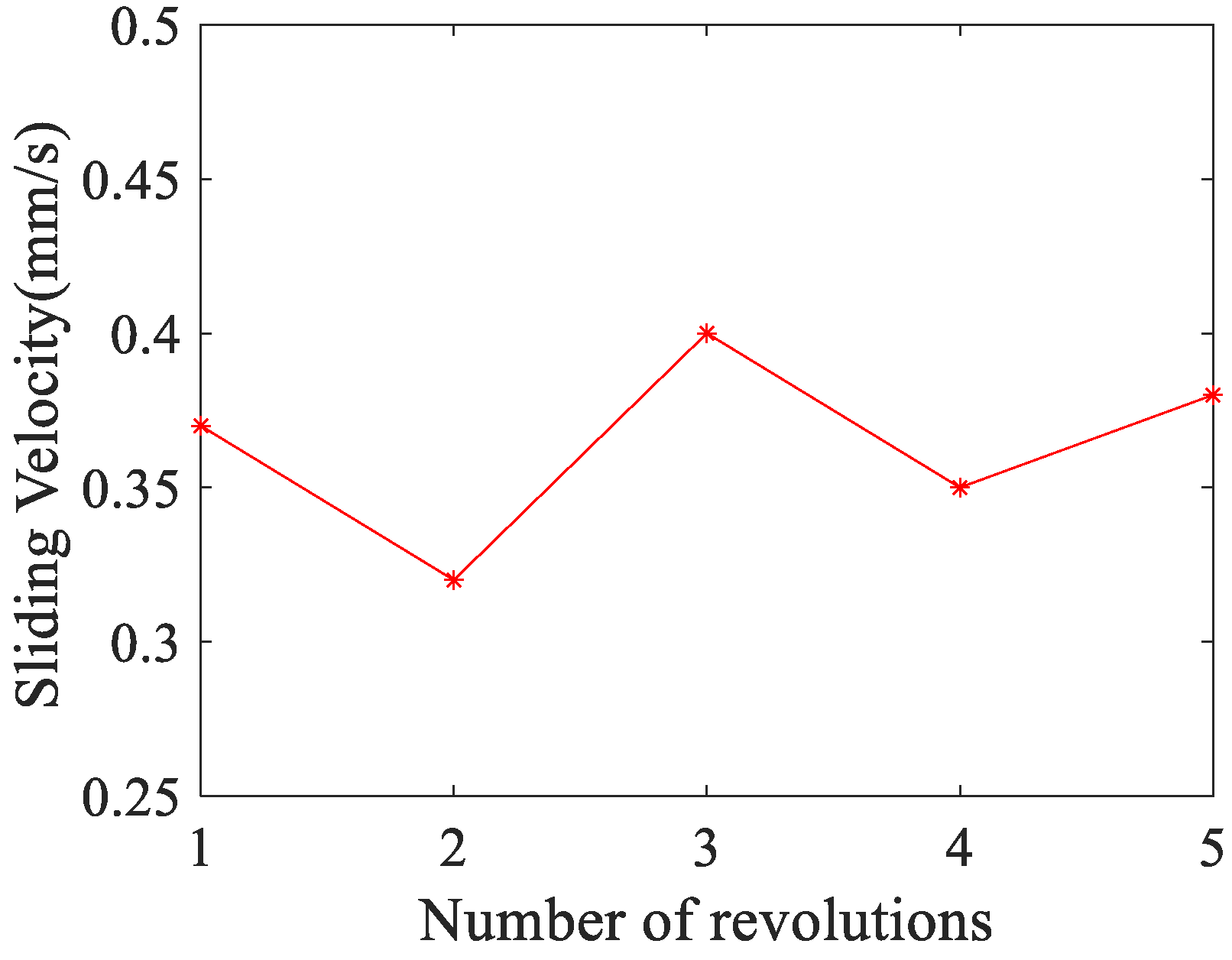
3.2. Experimental Results and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Han, Q.; Chu, F. Nonlinear dynamic model for skidding behavior of angular contact ball bearings. J. Sound Vib. 2015, 354, 219–235. [Google Scholar] [CrossRef]
- Gao, S.; Han, Q.; Pennacchi, P.; Chatterton, S.; Chu, F. Dynamic, thermal, and vibrational analysis of ball bearings with over-skidding behavior. Friction 2023, 11, 580–601. [Google Scholar] [CrossRef]
- Yu, Y.; He, Y.; Karimi, H.R.; Gelman, L.; Cetin, A.E. A two-stage importance-aware subgraph convolutional network based on multi-source sensors for cross-domain fault diagnosis. Neural Netw. 2024, 179, 106518. [Google Scholar] [CrossRef]
- Oktaviana, L.; Tong, V.C.; Hong, S.W. Skidding analysis of angular contact ball bearing subjected to radial load and angular misalignment. J. Mech. Sci. Technol. 2019, 33, 837–845. [Google Scholar] [CrossRef]
- Xu, T.; Xu, G.; Zhang, Q.; Hua, C.; Tan, H.; Zhang, S.; Luo, A. A preload analytical method for ball bearings utilising bearing skidding criterion. Tribol. Int. 2013, 67, 44–50. [Google Scholar] [CrossRef]
- Gupta, P.K. Dynamics of rolling-element bearings part IV: Ball bearing results. J. Tribol. 1979, 101, 319–326. [Google Scholar] [CrossRef]
- Chen, W.; Ma, Z.; Gao, L.; Li, X.; Pan, J. Quasi-static analysis of thrust-loaded angular contact ball bearings part I: Theoretical formulation. Chin. J. Mech. Eng. 2012, 25, 71–80. [Google Scholar] [CrossRef]
- Östensen, J.; Åström, H.; Höglund, E. Analysis of a grease-lubricated roller bearing under arctic conditions. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 1995, 209, 213–220. [Google Scholar] [CrossRef]
- Imado, K. Fundamental study of hall element method to detect ball motion in ball bearings. Tribol. Trans. 2000, 43, 66–73. [Google Scholar]
- Selvaraj, A.; Marappan, R. Experimental analysis of factors influencing the cage slip in cylindrical roller bearing. Int. J. Adv. Manuf. Technol. 2011, 53, 635–644. [Google Scholar] [CrossRef]
- Wang, W.Z.; Hu, L.; Zhang, S.G.; Zhao, Z.Q.; Ai, S. Modeling angular contact ball bearing without raceway control hypothesis. Mech. Mach. Theory 2014, 82, 154–172. [Google Scholar] [CrossRef]
- Ye, M.; Liang, J.; Li, L.; Qian, B.; Ren, M.; Zhang, M.; Lu, W.; Zong, Y. Full-field motion and deformation measurement of high speed rotation based on temporal phase-locking and 3D-DIC. Opt. Lasers Eng. 2021, 146, 106697. [Google Scholar] [CrossRef]
- Bao, R.; Duan, F.; Fu, X.; Yu, Z.; Liu, W.; Guo, G. Frequency-scanning interferometry for axial clearance of rotating machinery based on speed synchronization and extended Kalman filter. Opt. Lasers Eng. 2023, 164, 107515. [Google Scholar] [CrossRef]
- Wang, L.; Bi, S.; Li, H.; Gu, Y.; Zhai, C. Fast initial value estimation in digital image correlation for large rotation measurement. Opt. Lasers Eng. 2020, 127, 105838. [Google Scholar] [CrossRef]
- Jia, R.; Xue, J.; Lu, W.; Song, Z.; Xu, Z.; Lu, S. A Coupled Calibration Method for Dual Cameras-Projector System with Sub-Pixel Accuracy Feature Extraction. Sensors 2024, 24, 1987. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Ji, F.; Xue, J.; Wang, Y. Adaptive binocular fringe dynamic projection method for high dynamic range measurement. Sensors 2019, 19, 4023. [Google Scholar] [CrossRef]
- Xu, J.; Zheng, S.; Sun, K.; Song, P. Research and application of contactless measurement of transformer winding tilt angle based on machine vision. Sensors 2023, 23, 4755. [Google Scholar] [CrossRef]
- Furuno, S.; Kobayashi, K.; Okubo, T.; Kurihara, Y. A study on spin-rate measurement using a uniquely marked moving ball. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3439–3442. [Google Scholar]
- Liao, Y.H.; Wang, L.; Yan, Y. Instantaneous rotational speed measurement of wind turbine blades using a marker-tracking method. In Proceedings of the 2022 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Ottawa, ON, USA, 16–19 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar]
- Wang, Y.; Wang, L.; Yan, Y. Rotational speed measurement through digital imaging and image processing. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Wang, T.; Wang, L.; Yan, Y.; Zhang, S. Rotational speed measurement using a low-cost imaging device and image processing algorithms. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Wang, T.; Yan, Y.; Wang, L.; Hu, Y. Rotational speed measurement through image similarity evaluation and spectral analysis. IEEE Access 2018, 6, 46718–46730. [Google Scholar] [CrossRef]
- Wang, T.; Yan, Y.; Wang, L.; Hu, Y.; Zhang, S. Instantaneous rotational speed measurement using image correlation and periodicity determination algorithms. IEEE Trans. Instrum. Meas. 2019, 69, 2924–2937. [Google Scholar] [CrossRef]
- Wang, S.; Xu, Y.; Zheng, Y.; Zhu, M.; Yao, H.; Xiao, Z. Tracking a golf ball with high-speed stereo vision system. IEEE Trans. Instrum. Meas. 2018, 68, 2742–2754. [Google Scholar] [CrossRef]
- Jung, J.; Park, H.; Kang, S.; Lee, S.; Hahn, M. Measurement of initial motion of a flying golf ball with multi-exposure images for screen-golf. IEEE Trans. Consum. Electron. 2010, 56, 516–523. [Google Scholar] [CrossRef]
- Seo, S.W.; Kim, M.; Kim, Y. Optical and acoustic sensor-based 3D ball motion estimation for ball sport simulators. Sensors 2018, 18, 1323. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, D.; Tan, M. Visual measurement and prediction of ball trajectory for table tennis robot. IEEE Trans. Instrum. Meas. 2010, 59, 3195–3205. [Google Scholar] [CrossRef]
- Xie, Z.; Yang, C. Binocular Visual Measurement Method Based on Feature Matching. Sensors 2024, 24, 1807. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; Zhao, Y.; Wang, J. Real-time spin estimation of ping-pong ball using its natural brand. IEEE Trans. Instrum. Meas. 2015, 64, 2280–2290. [Google Scholar] [CrossRef]
- Li, W.; Jin, J.; Li, X.; Li, B. Method of rotation angle measurement in machine vision based on calibration pattern with spot array. Appl. Opt. 2010, 49, 1001–1006. [Google Scholar] [CrossRef]
- Zhong, J.; Zhong, S.; Zhang, Q.; Peng, Z.; Liu, S.; Yu, Y. Vision-based measurement system for instantaneous rotational speed monitoring using linearly varying-density fringe pattern. IEEE Trans. Instrum. Meas. 2018, 67, 1434–1445. [Google Scholar] [CrossRef]
- Kim, H.; Yamakawa, Y.; Senoo, T.; Ishikawa, M. Visual encoder: Robust and precise measurement method of rotation angle via high-speed RGB vision. Opt. Express 2016, 24, 13375–13386. [Google Scholar] [CrossRef]
- Guo, J.; Zhu, C.; Lu, S.; Zhang, D.; Zhang, C. Vision-based measurement for rotational speed by improving Lucas–Kanade template tracking algorithm. Appl. Opt. 2016, 55, 7186–7194. [Google Scholar] [CrossRef]
- Ma, S.; Yin, Y.; Chao, B. A real-time coupling model of bearing-rotor system based on semi-flexible body element. Int. J. Mech. Sci. 2023, 245, 108098. [Google Scholar] [CrossRef]
- Lu, X.; Xue, J.; Zhang, Q. High camera calibration method based on true coordinate computation of circle center. Chin. J. Lasers 2020, 47, 0304008. [Google Scholar]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Proceedings of the Numerical Analysis: Proceedings of the Biennial Conference, Dundee, Scotland, 28 June–1 July 1977; Springer: Berlin/Heidelberg, Germany, 2006; pp. 105–116. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | 2D Coordinates in Left Image | 2D Coordinates in Right Image |
|---|---|---|
| (929.75, 566) | (796.25, 674) | |
| (1043.75, 540) | (911.75, 666.5) | |
| (1036.25, 593) | (899.75, 719) |
| Point | Coordinate/mm | Coordinate/mm | Coordinate/mm |
|---|---|---|---|
| −5.46 | −7.18 | 307.62 | |
| −2.14 | −8.90 | 307.17 | |
| 2.94 | −9.58 | 307.91 | |
| −1.86 | −6.22 | 306.74 | |
| 0.10 | −8.18 | 306.96 | |
| 4.12 | −9.02 | 308.22 |
| Point | Three-Dimensional Coordinate | Radius |
|---|---|---|
| (−1.24, −5.90, 312.51) | 6.30 | |
| (−2.56, −7.21, 311.64) | 5.85 | |
| (−4.50, −9.16, 308.56) | 4.48 | |
| (−0.79, −5.45, 312.81) | 6.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, W.; Xue, J.; Pu, W.; Chen, H.; Wang, K.; Jia, R. A Calculation Method of Bearing Balls Rotational Vectors Based on Binocular Vision Three-Dimensional Coordinates Measurement. Sensors 2024, 24, 6499. https://doi.org/10.3390/s24196499
Lu W, Xue J, Pu W, Chen H, Wang K, Jia R. A Calculation Method of Bearing Balls Rotational Vectors Based on Binocular Vision Three-Dimensional Coordinates Measurement. Sensors. 2024; 24(19):6499. https://doi.org/10.3390/s24196499
Chicago/Turabian StyleLu, Wenbo, Junpeng Xue, Wei Pu, Hongyang Chen, Kelei Wang, and Ran Jia. 2024. "A Calculation Method of Bearing Balls Rotational Vectors Based on Binocular Vision Three-Dimensional Coordinates Measurement" Sensors 24, no. 19: 6499. https://doi.org/10.3390/s24196499
APA StyleLu, W., Xue, J., Pu, W., Chen, H., Wang, K., & Jia, R. (2024). A Calculation Method of Bearing Balls Rotational Vectors Based on Binocular Vision Three-Dimensional Coordinates Measurement. Sensors, 24(19), 6499. https://doi.org/10.3390/s24196499