



Remaining Useful Life Estimation of Hollow Worn Railway Vehicle Wheels via On-Board Random Vibration-Based Wheel Tread Depth Estimation


Abstract
:1. Introduction
- The automated RULE of hollow worn railway wheels via their on-board tread depth estimation is for the first time achieved using a limited number of vibration signals for the training of the employed method, which are obtained from a single accelerometer located on the vehicle bogie avoiding thus the harsh environment of the axlebox area.
- The on-board wheels tread depth estimation is based on the advanced modeling provided by the FP–AR model, which may account for the complete information—there is no need for predefined frequencies or other static quantities (e.g., RMS, kurtosis, etc.) with limited information—of the vehicle dynamics that is included in the vibration signals, leading thus to the precise (no gross classification) estimation of the wheels tread and thus their RULE. Based on this, the introduced method is characterized by high sensitivity to any subtle change to the wheels tread achieving so prompt RULE of hollow worn wheels, as it is the case of wheels with approximately zero tread depth.
- The use of the wheel tread depth as the feature that leads to the estimation of their remaining mileage is a unique characteristic of the introduced method, due to the fact that the tread depth is the inherent quantity that characterizes hollow worn wheels, always with a monotonic pattern that facilitates prognostics. Additionally, tread depth provides valuable insight for maintenance as one of the most important wheels characteristics that determines their remaining useful life.
2. The Operating Framework
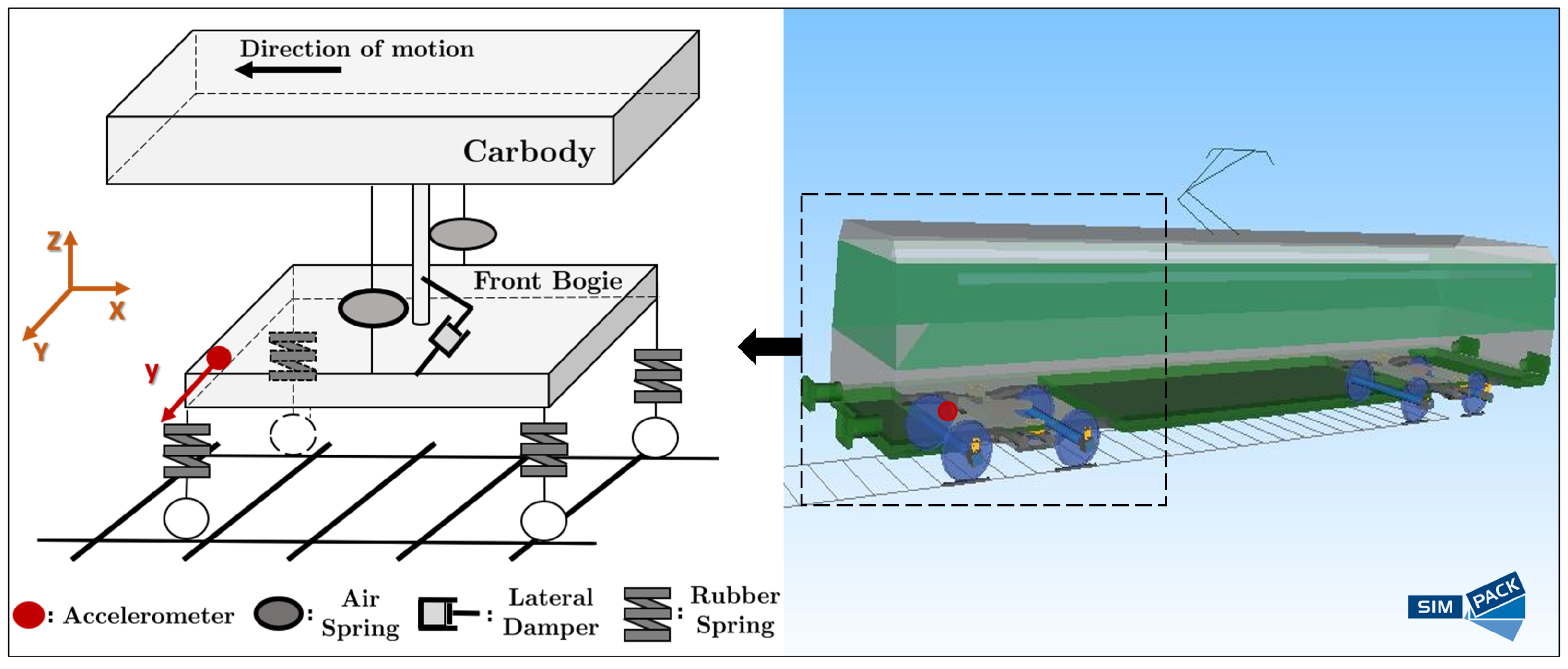
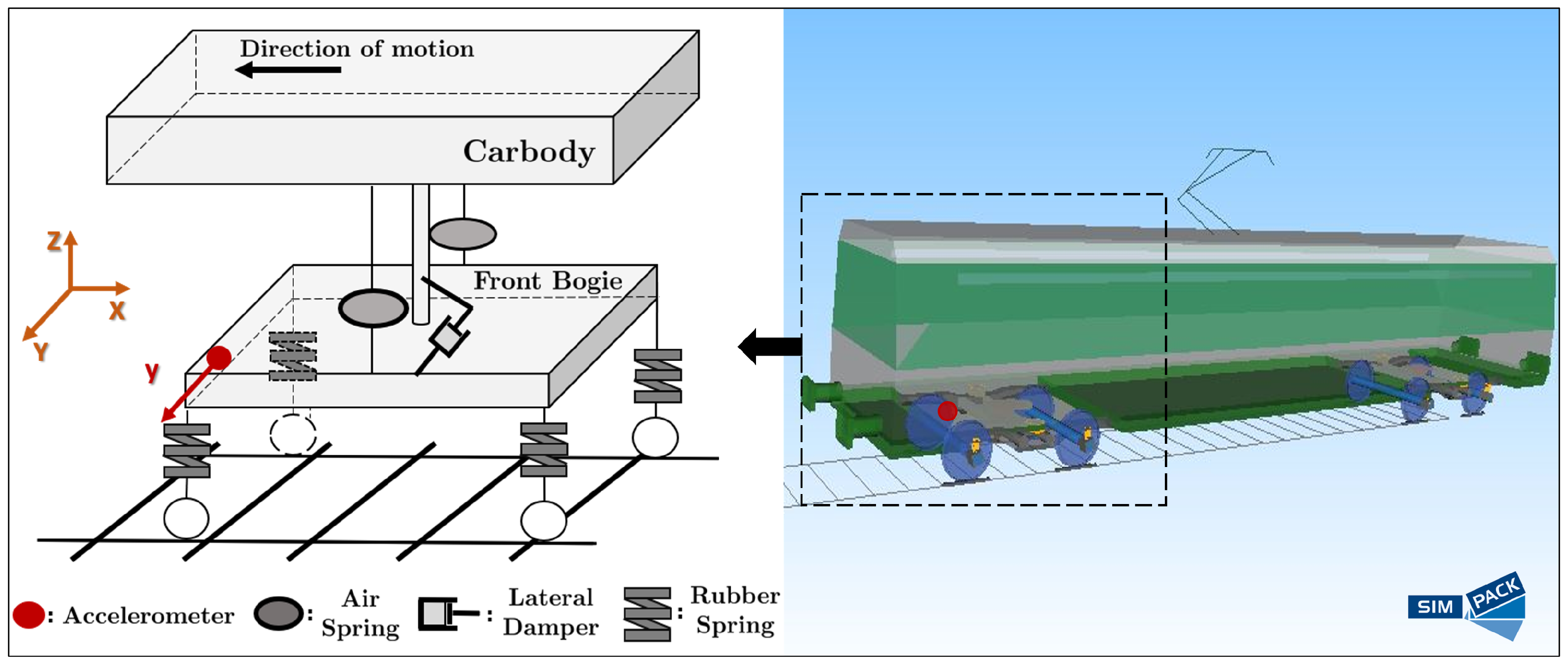
- Baseline phase: This is the training phase of the method which is performed once in an initial wheels re-profiling cycle where M measurements of random vibration acceleration signals for a sample of distinct, running mileages () along with the associated wheels tread depths are performed. A N-sample-long vibration acceleration signal ( designating the normalized with the sampling period discrete time) is obtained from the vehicle’s bogie (Figure 1) in each measurement and thus a total of M vibration signals are available. It is noted that measurements are performed for tread depths in the range of , where (herein mm) is a critical limit that is defined by the railway vehicle maintenance operator. In addition, tread depths are considered only for the leading vehicle wheels expecting similar wear for the following wheels, according to Attiko Metro S.A. maintenance experts.
- Inspection phase: This phase is performed in real time (new re-profiling cycle) once the training of the RULE method has been completed, using an on-board measurement of a new acceleration signal from the accelerometer location used in the baseline phase, corresponding to unknown (subscript ‘u’ designates unknown) wheels tread depth or else unknown k, and thus unknown wheel remaining useful mileage to be estimated with the method’s operation.
3. The Monte Carlo Simulations via a Simpack-Based Railway Vehicle Model
3.1. The Railway Vehicle Model
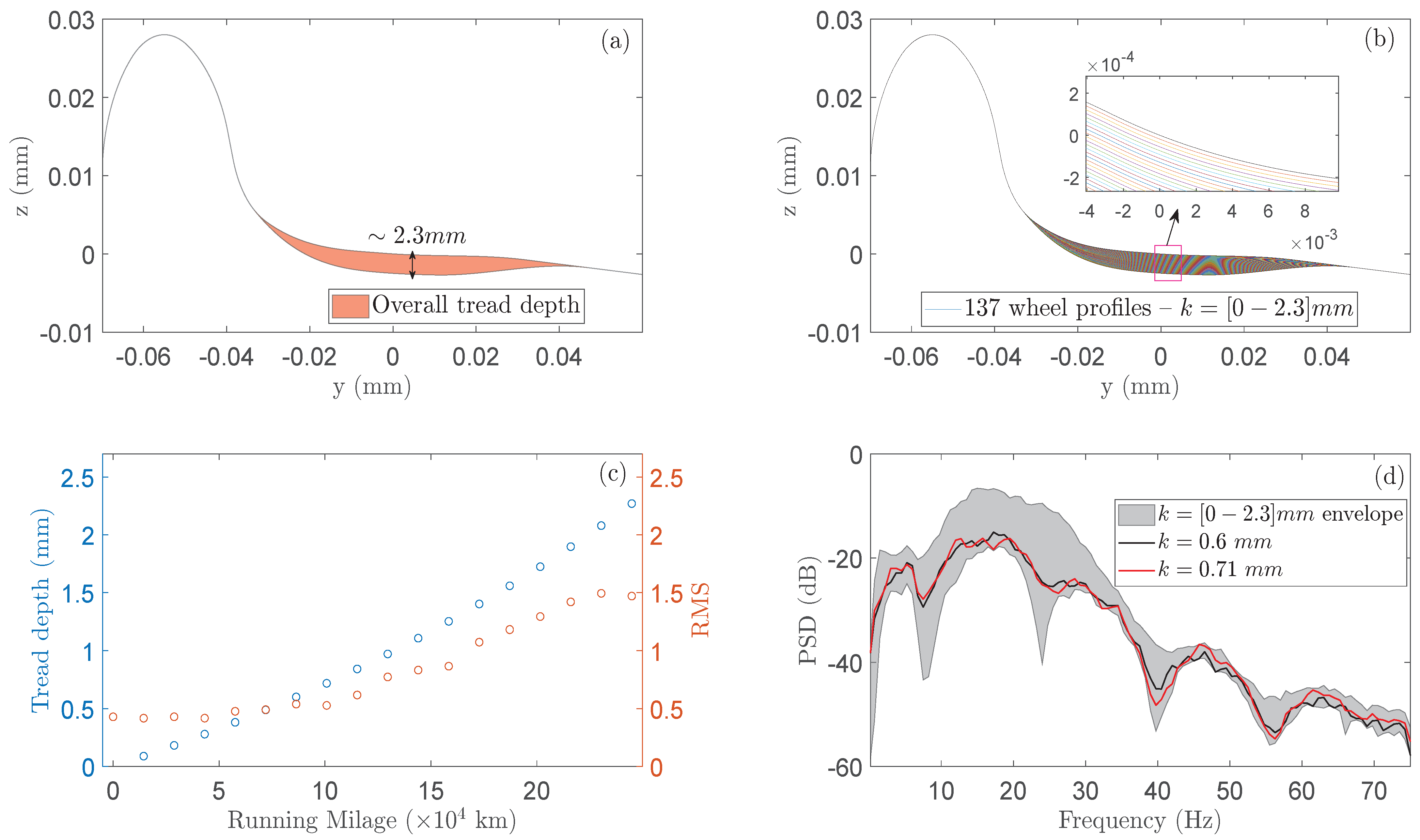
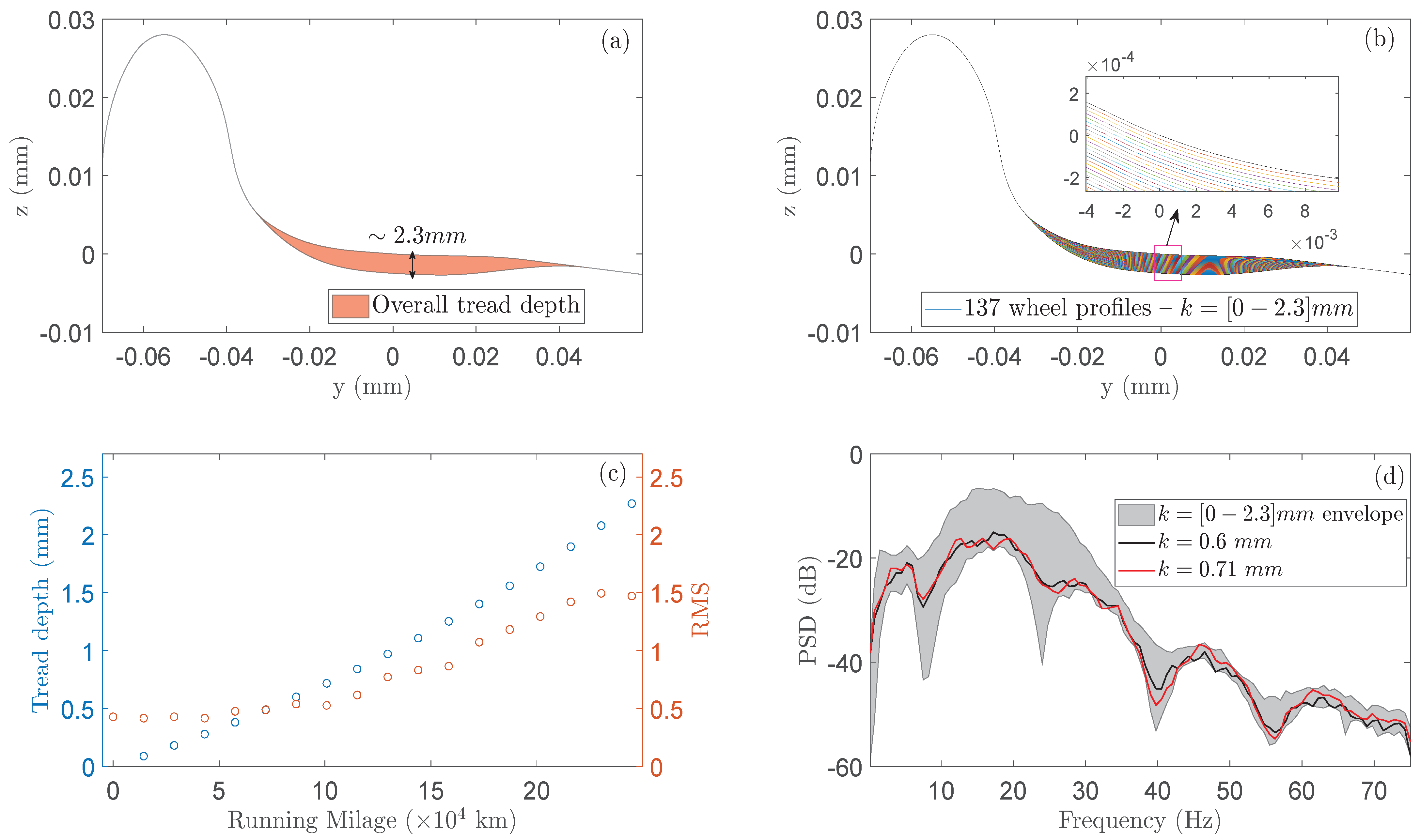
3.2. The Hollow Wear Conditions, the Simulations and the Vibration Signals
3.3. The Hollow Worn Wheels and Their Effects on the Vibration Signals
4. The Remaining Useful Life Estimation Method
- Step 1:
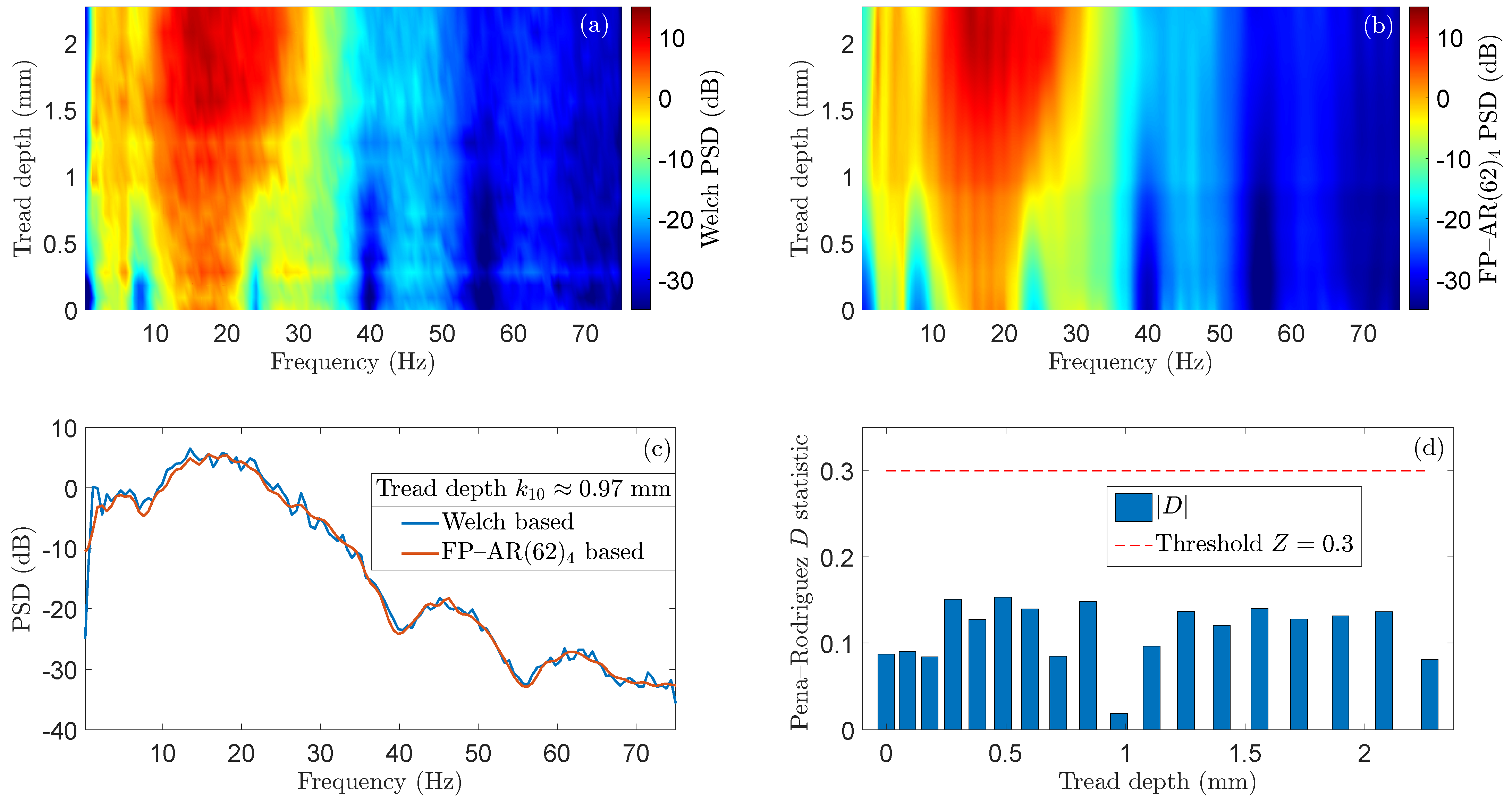
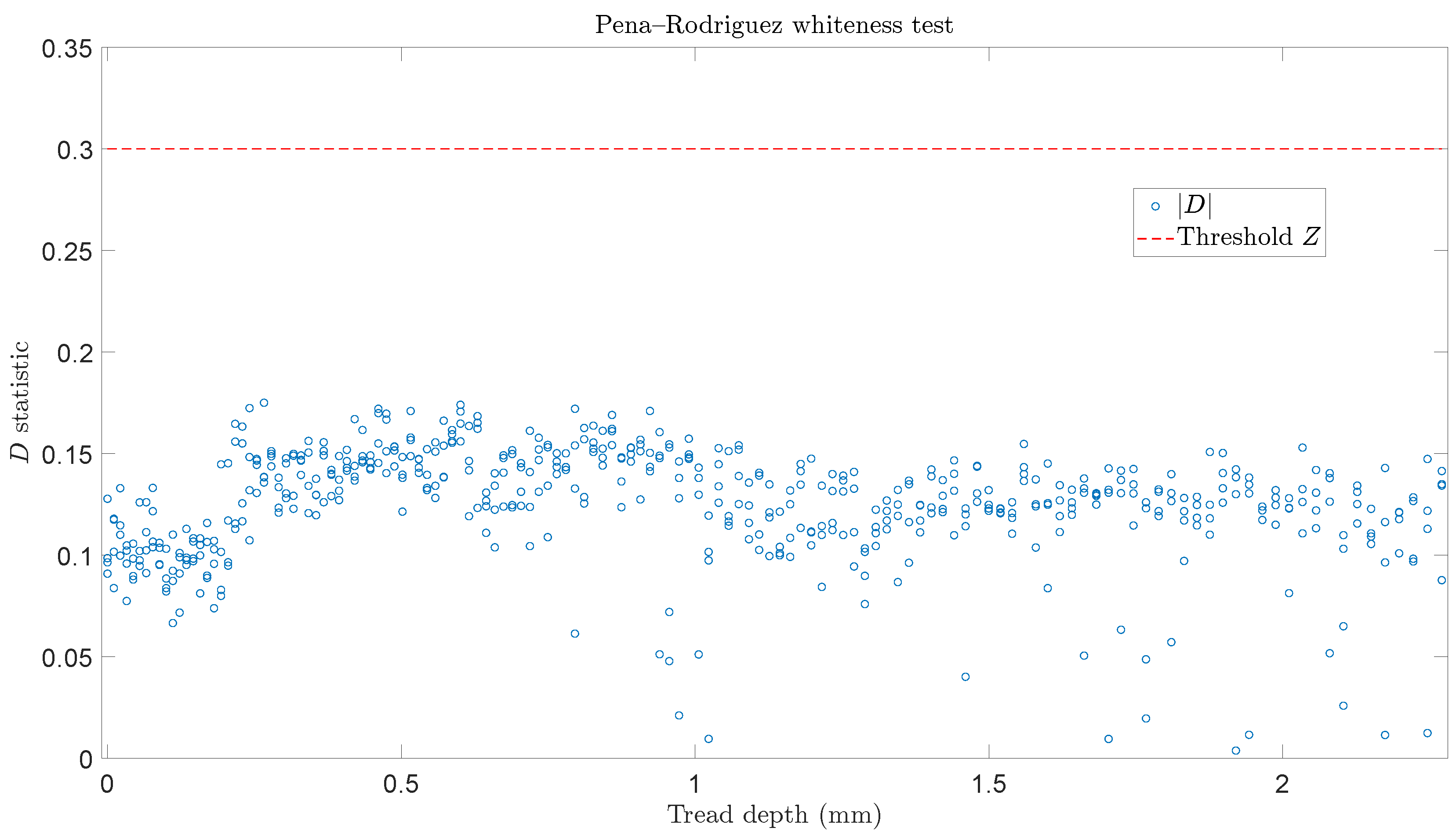
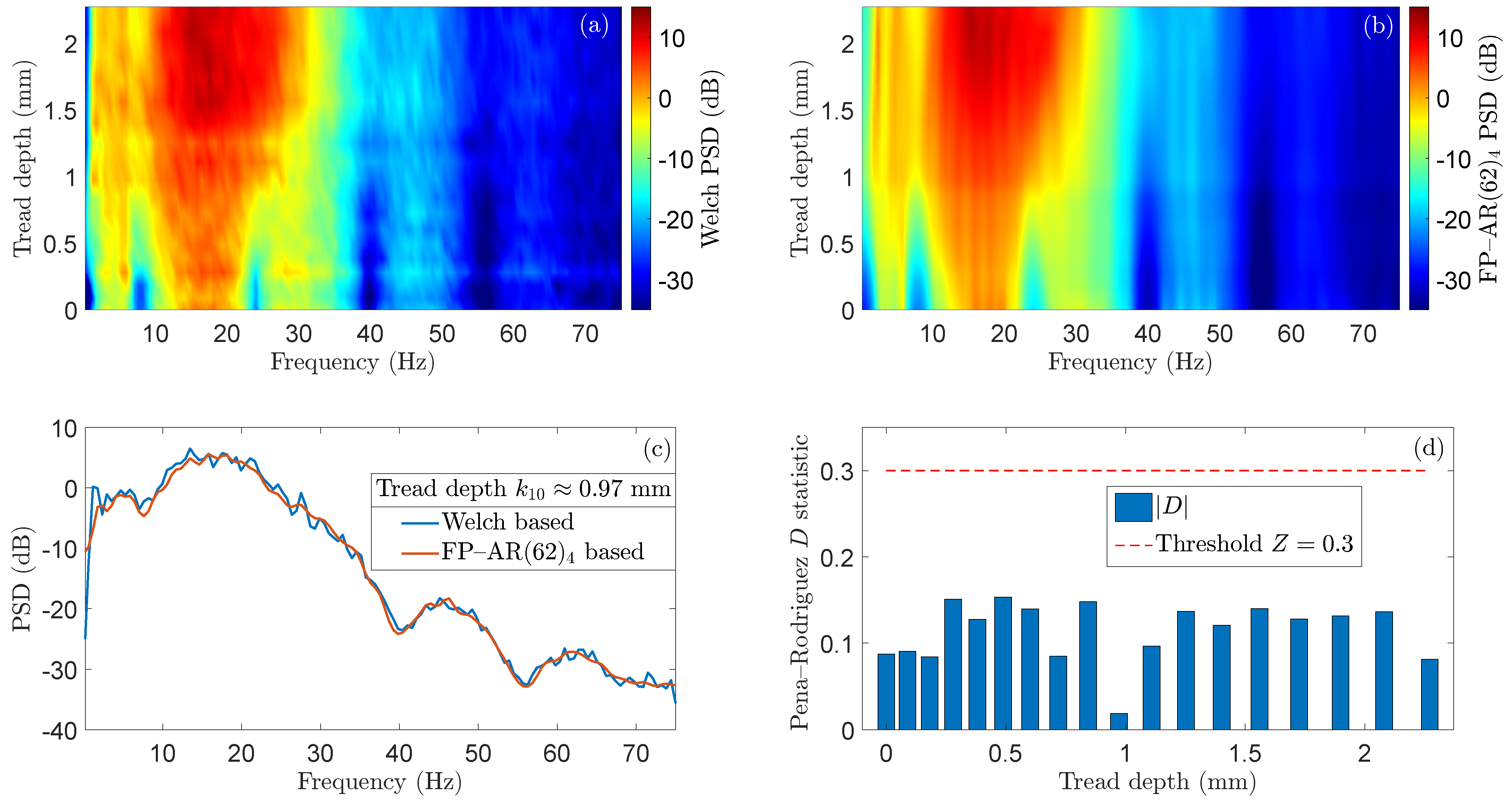
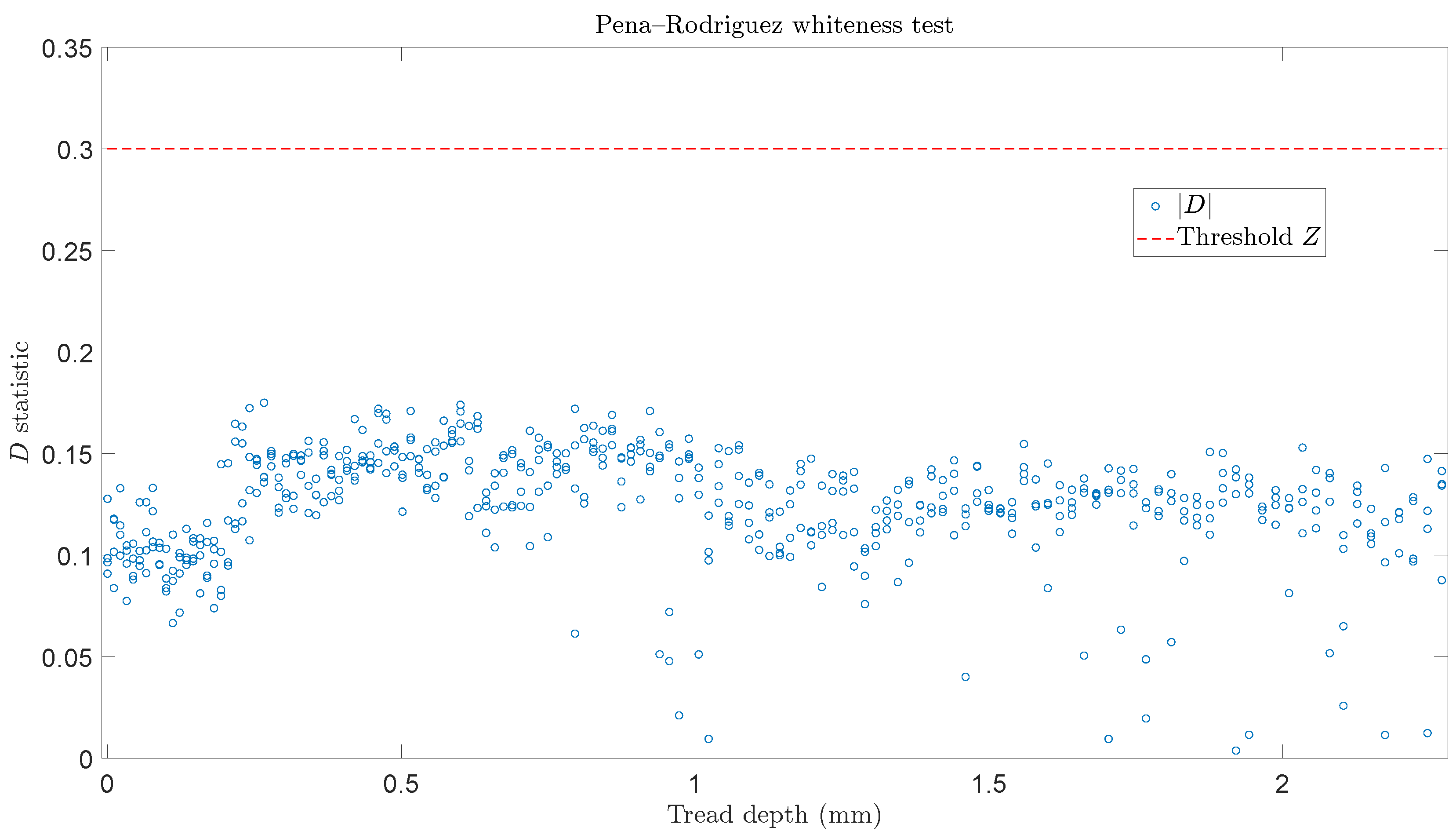
- Given the estimated FP–AR( model of the baseline phase, is substituted in Equation (1), the latter is solved with respect to and based on this expression the estimation of the unknown k (current tread depth) is achieved using the following Nonlinear Least Squares (NLS) estimator, which is implemented by golden search and parabolic interpolation [25]:with designating the estimate and the model residuals under an unknown tread depth. The obtained is finally validated through typical hypothesis testing of whiteness via the Pena–Rodriguez test statistic D, which follows a standard normal distribution for a white sequence [26]. The whiteness hypothesis is accepted iff with Z indicating a user selected threshold that is determined using typical normal distribution risk levels or heuristically based on the max absolute value of D as obtained from the identified FP–AR model residual signals. The successful validation of the estimate indicates that the current dynamics as obtained from the measured vibration signal may be accurately represented by the FP–AR model of the baseline phase and the estimate of the tread depth is accepted.
- Step 2:
- Based on the tread depth evolution function of the baseline phase, the indicated hollow wear by is matched with the corresponding running mileage that leads to such a hollow wear which, as mentioned previously, may not necessarily be the same with the current mileage indicated by the train speed meter. Thus:and wheels RULE in terms of wheels remaining mileage estimation is readily obtained as:with indicating the running mileage corresponding to the selected critical limit of the tread depth as defined in the baseline phase.
5. Performance Assessment of the Remaining Useful Life Estimation Method
6. Comparison with a Multi-Health State Classification Method for RULE
7. Conclusions and Discussion
- (i)
- A key advantage of the proposed method is the fact that the wheel RULE is achieved using a very special feature, the wheel tread depth which, unlike with the statistical models—which rely on static quantities such as the RMS, kurtosis and thus on exploiting limited information of the vehicle dynamics—is the characteristic that describes exactly the considered hollow wear, and is precisely estimated through the FP–AR model using the full information included in the vibration signals. Another advantage of the introduced method is that its training requires only a limited number of on-board vibration signals (18 are used in this study) from a single re-profiling cycle, compared to the AI/ML model-based methods that typically require a significant number of vibration signals from multiple run-to-failure experiments. Regarding the multi-class classification methods, the advantage of the new method is its capability to provide precise RULE instead of rough classification.
- (ii)
- Other general advantages of the introduced method that may be mentioned are: (a) Its capability to operate with just a single accelerometer placed on the vehicle’s bogie frame that effectively circumvents the problem of frequent calibration or even replacement of sensors which are commonly installed to the axlebox area with highly harsh and noisy conditions. (b) It offers simplicity as its training includes the relatively simple identification of an FP–AR model and the determination of the evolution function, while its operation in real time requires a simple optimization procedure and the validation of the tread estimate that directly leads to the wheels useful mileage through the evolution function. (c) The estimation of the wheel tread depth provides valuable insight about the evolution of the hollow wear over the running mileage and conditions such as abrupt and long braking, imbalanced payload, and so on.
- (iii)
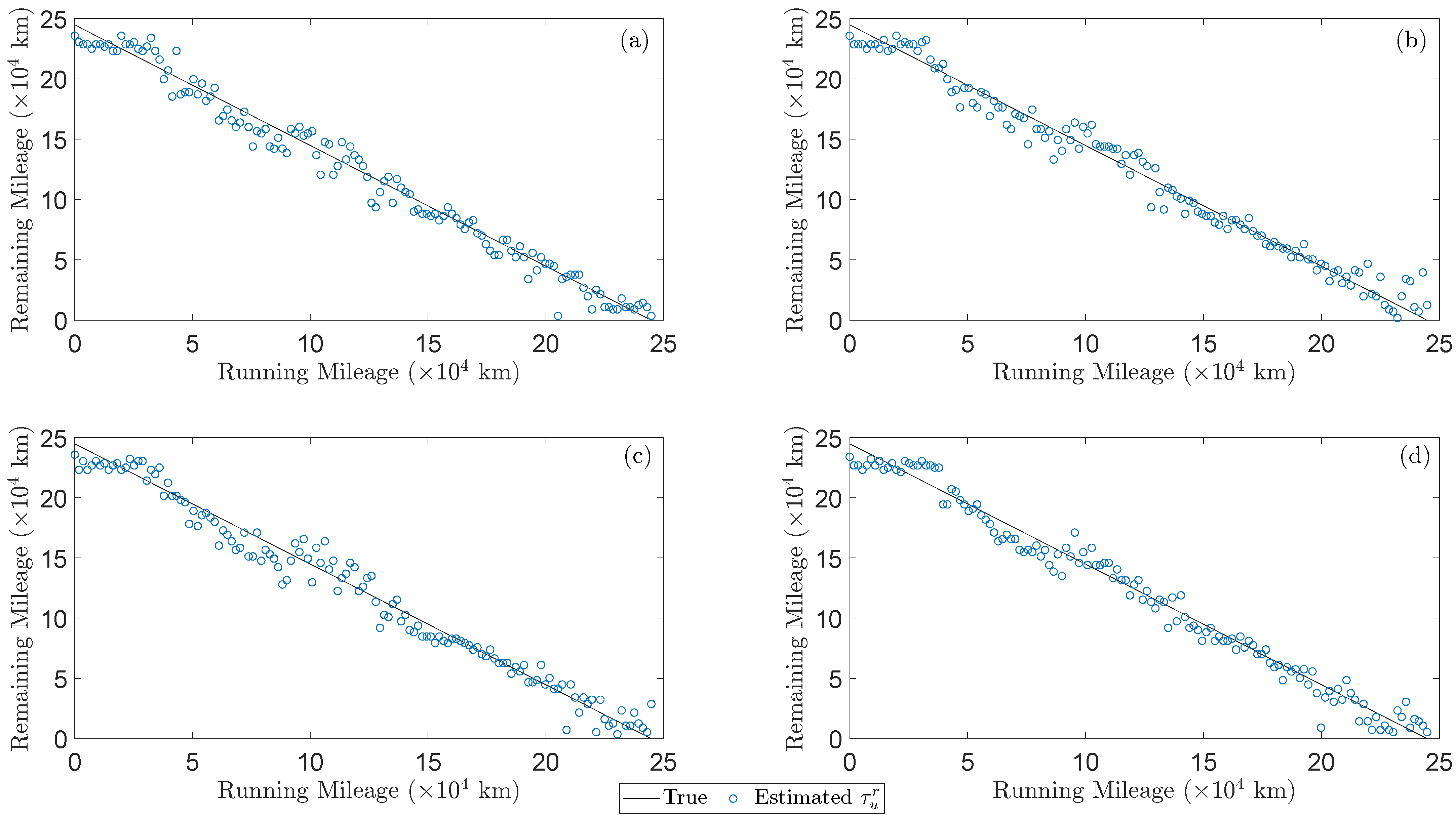
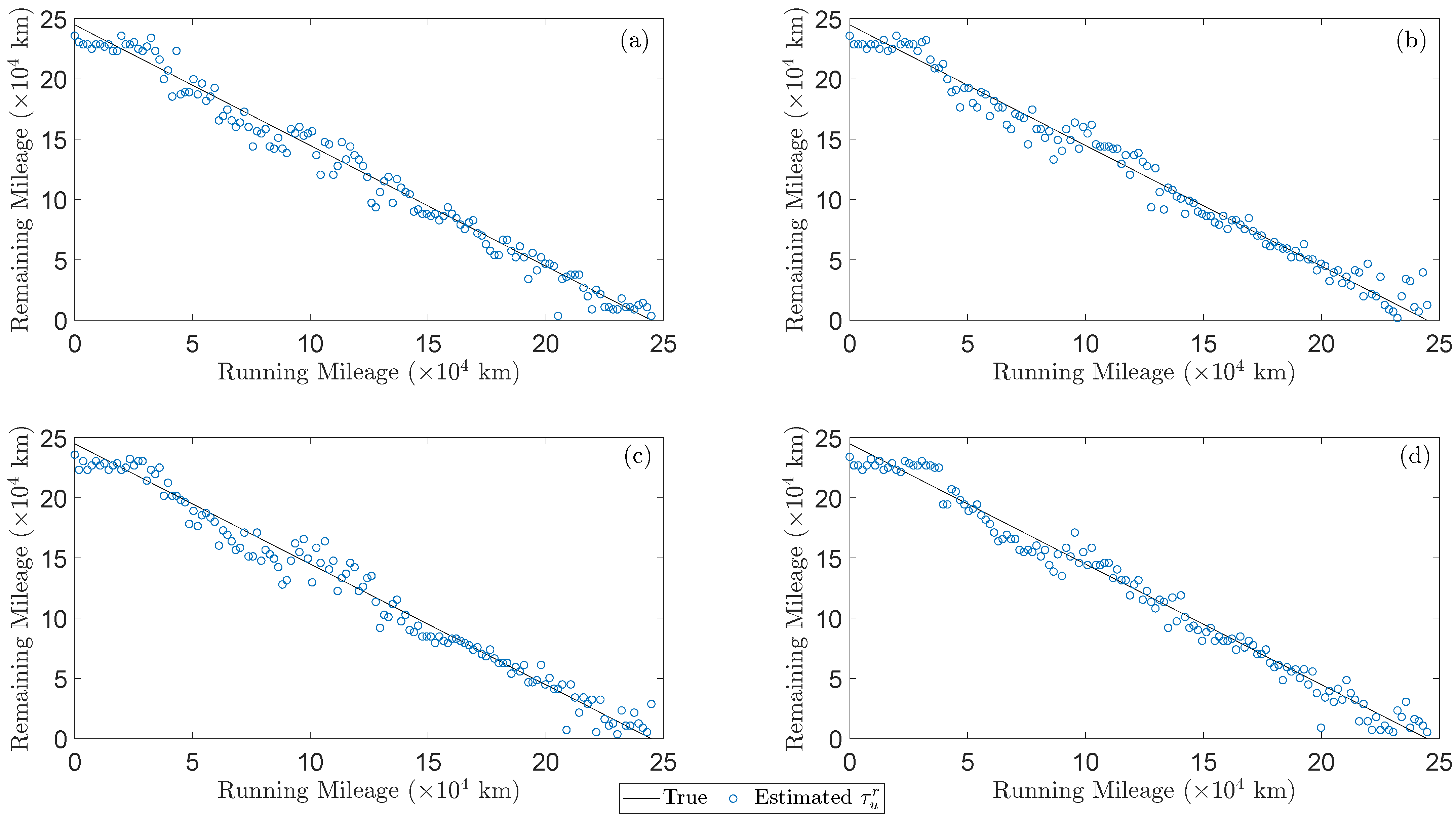
- The RULE results of the method’s assessment based on the four sets of signals from the corresponding re-profiling cycles in the inspection phase indicated high accuracy in tread depth estimation from very early stages of hollow wear with the maximum mean absolute error to be mm (based on Set 3), while the remaining mileage maximum mean error of 8170 km corresponds to the of the total mileage.
- (iv)
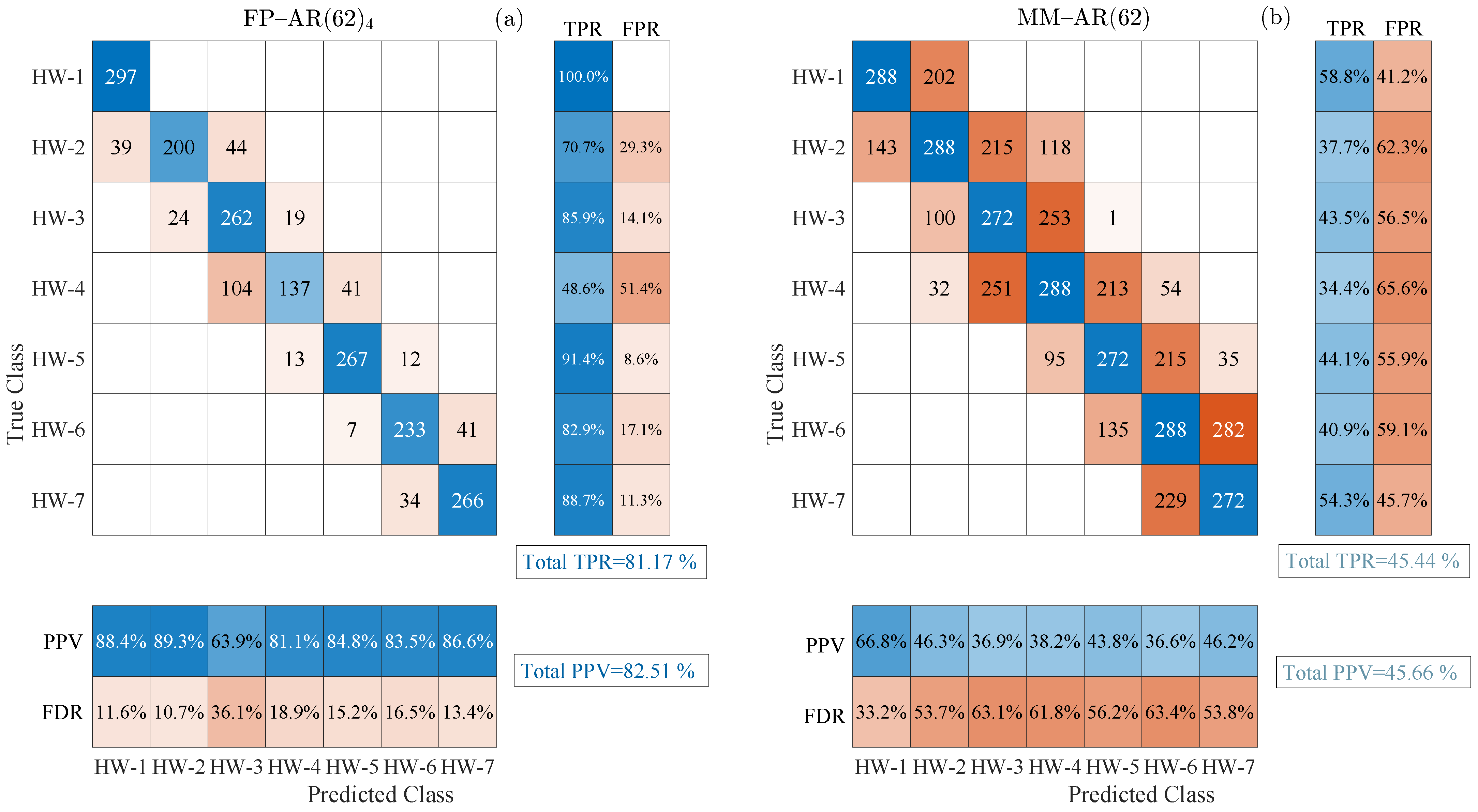
- The results from the comparison with a multi-health state classification MM–AR-based method, involving 2040 inspection test cases, revealed the superior performance of the introduced method, although it is not designed to operate in such a classification framework. It achieved an overall True Positive Rate of and precision of for the considered health states, with its competitor to demonstrate poor performance with an overall True Positive Rate of and precision of .
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AR | AutoRegressive |
| BIC | Bayesian Information Criterion |
| FP | Functionally Pooled |
| HW | Hollow Wear |
| MM | Multiple Model |
| OLS | Ordinary Least Squares |
| PSD | Power Spectral Density |
| RULE | Remaining Useful Life Estimation |
References
- Sawley, K.; Urban, C.; Walker, R. The effect of hollow-worn wheels on vehicle stability in straight track. Wear 2005, 258, 1100–1108. [Google Scholar] [CrossRef]
- Sawley, K.; Wu, H. The formation of hollow-worn wheels and their effect on wheel/rail interaction. Wear 2005, 258, 1179–1186. [Google Scholar] [CrossRef]
- Asplund, M.; Palo, M.; Famurewa, S.; Rantatalo, M. A study of railway wheel profile parameters used as indicators of an increased risk of wheel defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 323–334. [Google Scholar] [CrossRef]
- Kaliorakis, N.; Sakellariou, J.S.; Fassois, S.D. On-Board Random Vibration-Based Robust Detection of Railway Hollow Worn Wheels under Varying Traveling Speeds. Machines 2023, 11, 933. [Google Scholar] [CrossRef]
- Pires, A.; Pacheco, L.; Dalvi, I.; Endlich, C.; Queiroz, J.; Antoniolli, F.; Santos, G. The effect of railway wheel wear on reprofiling and service life. Wear 2021, 477, 203799. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Tamssaouet, F.; Nguyen, K.T.; Medjaher, K.; Orchard, M.E. System-level failure prognostics: Literature review and main challenges. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2023, 237, 524–545. [Google Scholar] [CrossRef]
- Kim, S.; Choi, J.H.; Kim, N. Challenges and opportunities of system-level prognostics. Sensors 2021, 21, 7655. [Google Scholar] [CrossRef]
- Lei, J.; Zhang, W.; Jiang, Z.; Gao, Z. A Review: Prediction Method for the Remaining Useful Life of the Mechanical System. J. Fail. Anal. Prev. 2022, 22, 2119–2137. [Google Scholar] [CrossRef]
- Huang, G.; Zhao, Y.; Wang, H.; Ma, X.; Tang, D. A Prognostic Framework for Wheel Treads Integrating Parameter Correlation and Multiple Uncertainties. Appl. Sci. 2020, 10, 467. [Google Scholar] [CrossRef]
- Yan, B.; Ma, X.; Huang, G.; Zhao, Y. Two-stage physics-based Wiener process models for online RUL prediction in field vibration data. Mech. Syst. Signal Process. 2021, 152, 107378. [Google Scholar] [CrossRef]
- Yan, B.; Wang, H.; Ma, X. Correlation-driven multivariate degradation modeling and RUL prediction based on Wiener process model. Qual. Reliab. Eng. Int. 2023, 39, 3203–3229. [Google Scholar] [CrossRef]
- Ma, X.; Yan, B.; Wang, H.; Liao, H. Decision-level machinery fault prognosis using N-BEATS-based degradation feature prediction and reconstruction. Mech. Syst. Signal Process. 2023, 198, 110435. [Google Scholar] [CrossRef]
- Weston, P.; Roberts, C.; Yeo, G.; Stewart, E. Perspectives on railway track geometry condition monitoring from in-service railway vehicles. Veh. Syst. Dyn. 2015, 53, 1063–1091. [Google Scholar] [CrossRef]
- Iliopoulos, I.A.; Sakellariou, J.S.; Fassois, S.D.; Chronopoulos, E.; Deloukas, A.; Giannakis, C.; Kapiris, D.; Kritikakos, K.; Leoutsakos, G.; Tountas, E.; et al. On-board vibration-based remaining useful life estimation of hollow worn railway vehicle wheels. J. Phys. Conf. Ser. 2022, 2184, 012023. [Google Scholar] [CrossRef]
- Chelmiah, E.; McLoone, V.; Kavanagh, D. Remaining Useful Life Estimation of Rotating Machines using Octave Spectral Features. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; Volume 2020, pp. 3031–3036. [Google Scholar] [CrossRef]
- Baptista, M.L.; Prendinger, H. Aircraft Engine Bleed Valve Prognostics Using Multiclass Gated Recurrent Unit. Aerospace 2023, 10, 354. [Google Scholar] [CrossRef]
- Wu, J.Y.; Wu, M.; Chen, Z.; Li, X.; Yan, R. A joint classification-regression method for multi-stage remaining useful life prediction. J. Manuf. Syst. 2021, 58, 109–119. [Google Scholar] [CrossRef]
- Louen, C.; Ding, S.X.; Kandler, C. A new framework for remaining useful life estimation using Support Vector Machine classifier. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 228–233. [Google Scholar] [CrossRef]
- Sakellariou, J.; Fassois, S. Functionally Pooled models for the global identification of stochastic systems under different pseudo-static operating conditions. Mech. Syst. Signal Process. 2016, 72–73, 785–807. [Google Scholar] [CrossRef]
- Rulka, W. SIMPACK—A Computer Program for Simulation of Large-motion Multibody Systems. In Multibody Systems Handbook; Schiehlen, W., Ed.; Springer: Berlin/Heidelberg, Germany, 1990; pp. 265–284. [Google Scholar] [CrossRef]
- Bergander, B.; Kunnes, W. ERRI B176/DT 290: B176/3 Benchmark Problem, Results and Assessment: Technical Report; European Rail Research Institute: Utrecht, The Netherlands, 1993. [Google Scholar]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1999. [Google Scholar] [CrossRef]
- Sakellariou, J.S.; Fassois, S.D.; Sakaris, C.S. IWSHM 2017: Vibration-based damage localization and estimation via the stochastic functional model–based method: An overview. Struct. Health Monit. 2018, 17, 1335–1348. [Google Scholar] [CrossRef]
- Peña, D.; Rodríguez, J. The log of the determinant of the autocorrelation matrix for testing goodness of fit in time series. J. Stat. Plan. Inference 2006, 136, 2706–2718. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Tharwat, A. Classification assessment methods. Appl. Comput. Inform. 2021, 17, 168–192. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tread Depth (mm) | Running Mileage (km) |
|---|---|
| 0.34 | 57,633 |
| 0.72 | 109,795 |
| 1.03 | 133,129 |
| 1.55 | 185,342 |
| 1.93 | 217,723 |
| 2.27 | 244,786 |
| No. of Tread Depths k (HW Conditions) | No. of Signals | |
|---|---|---|
| Baseline Phase | Inspection Phase | |
| 137 with [0–2.3] mm | 18 | 548 (4 sets of 137 signals *) |
| (mileage interval: 1800 km) | (mileage interval: 14,400 km) | |
| Sampling freq: Hz; Bandwidth: [0–75] Hz; signal length: N = 3600 samples; | ||
| traveling speed: 35 m/s; Total running mileage: = 244,800 km () | ||
| Baseline phase | ||||
|---|---|---|---|---|
| Estimated Model | No. of projection coefficients | Samples Per Parameter | Condition Number a | BIC |
| FP–AR(62)4 | 248 | |||
| FP–AR: Estimation via Ordinary Least Squares (OLS) [21]; No. of signals: ; Signal length: samples | ||||
| Functional subspace: Dimensionality determination via Genetic Algorithm, Population = 100, Elite count = 20, | ||||
| Number of generations = 50, Function tolerance = , Matlab function: | ||||
| Functional basis p: 4 Shifted Legendre polynomials b | ||||
| Evolution function: with and , Matlab function: fit.m | ||||
| Inspection phase | ||||
| Wheel tread depth estimation: Estimation of k via NLS estimator (golden search & parabolic interpolation), Function tolerance = , | ||||
| Step Tolerance = , Matlab function: | ||||
| Validation: Pena–Rodriguez residual whiteness test; user selected threshold (No. of lags ) | ||||
| Remaining Useful Life Estimation: Based on Equation (4) is | ||||
| Signal Set | MAE | |
|---|---|---|
| Tread Depth | Remaining Mileage (%) * | |
| 1 | mm | km () |
| 2 | mm | km () |
| 3 | mm | km () |
| 4 | mm | km () |
| Health State Class | Tread Depth Range (mm) | Remaining Mileage Range (mm) |
|---|---|---|
| HW–1 | [0, 0.22) | [244,800, 210,000) |
| HW–2 | [0.22, 0.47) | [210,000, 175,000) |
| HW–3 | [0.47, 0.74) | [175,000, 140,000) |
| HW–4 | [0.74, 1.07) | [140,000, 105,000) |
| HW–5 | [1.07, 1.42) | [105,000, 70,000) |
| HW–6 | [1.42, 1.83) | [70,000, 35,000) |
| HW–7 | [1.83, 2.30] | [35,000, 0] |
| Method | True Positive Rate (TPR) (%) | Precision (PPV) (%) |
|---|---|---|
| FP–AR(62)4 | ||
| MM–AR(62) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iliopoulos, I.A.; Sakellariou, J.S. Remaining Useful Life Estimation of Hollow Worn Railway Vehicle Wheels via On-Board Random Vibration-Based Wheel Tread Depth Estimation. Sensors 2024, 24, 375. https://doi.org/10.3390/s24020375
Iliopoulos IA, Sakellariou JS. Remaining Useful Life Estimation of Hollow Worn Railway Vehicle Wheels via On-Board Random Vibration-Based Wheel Tread Depth Estimation. Sensors. 2024; 24(2):375. https://doi.org/10.3390/s24020375
Chicago/Turabian StyleIliopoulos, Ilias A., and John S. Sakellariou. 2024. "Remaining Useful Life Estimation of Hollow Worn Railway Vehicle Wheels via On-Board Random Vibration-Based Wheel Tread Depth Estimation" Sensors 24, no. 2: 375. https://doi.org/10.3390/s24020375
APA StyleIliopoulos, I. A., & Sakellariou, J. S. (2024). Remaining Useful Life Estimation of Hollow Worn Railway Vehicle Wheels via On-Board Random Vibration-Based Wheel Tread Depth Estimation. Sensors, 24(2), 375. https://doi.org/10.3390/s24020375