
Triboelectric Contact Localization Electronics: A Systematic Review

Abstract
:1. Introduction
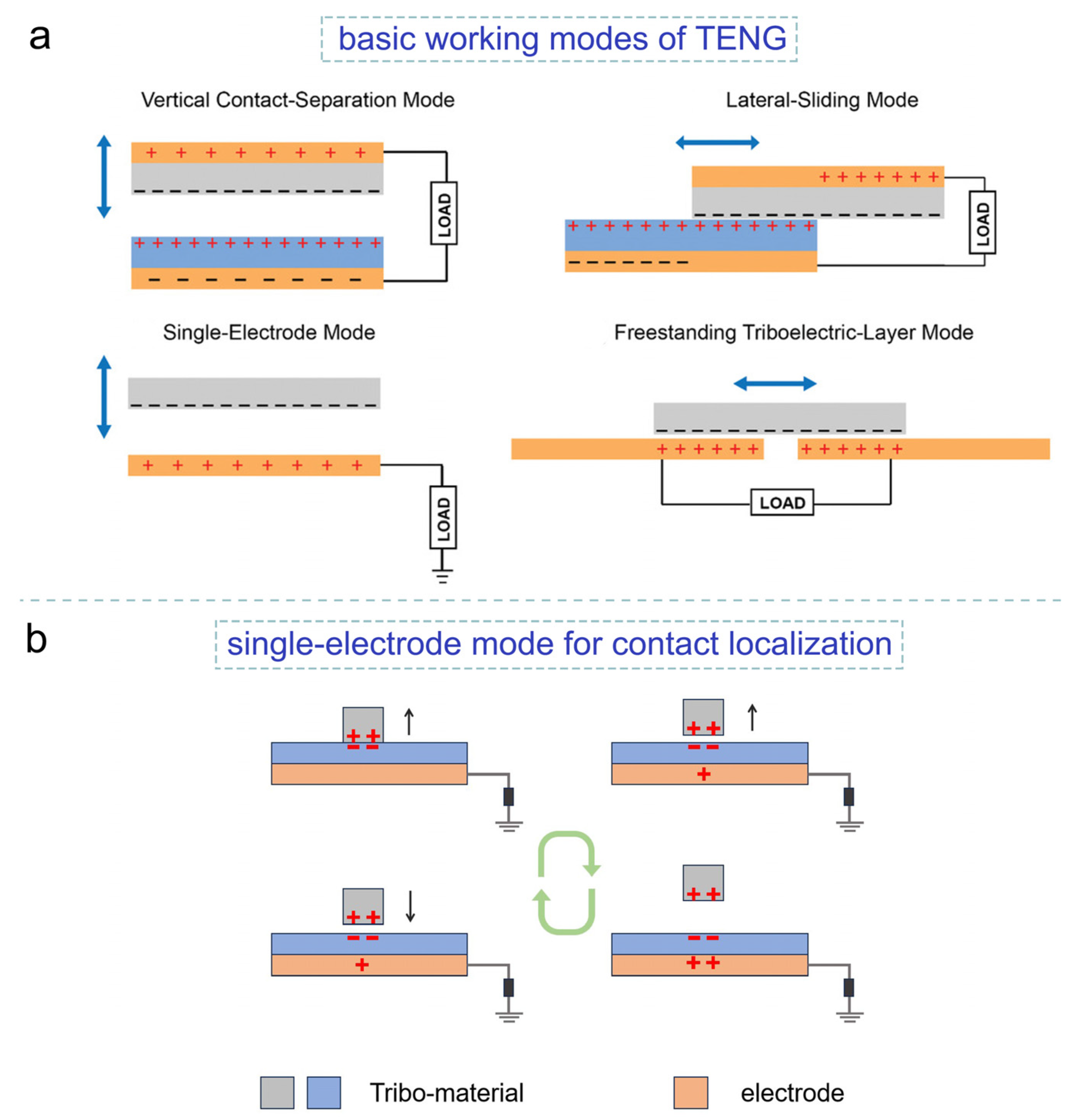
2. Working Mechanisms
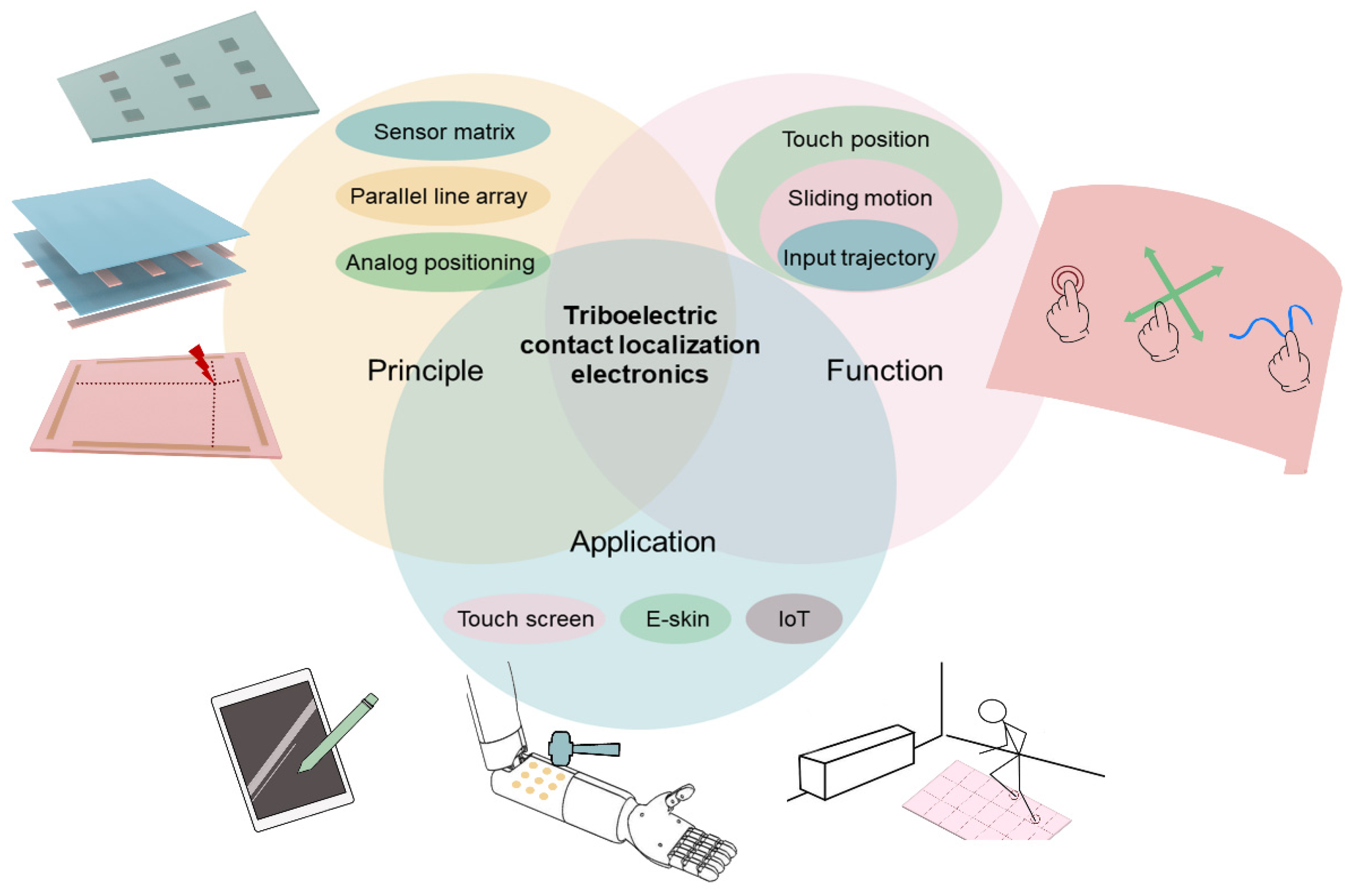
2.1. Triboelectric Contact Localization
2.2. Working Principles of TCLE
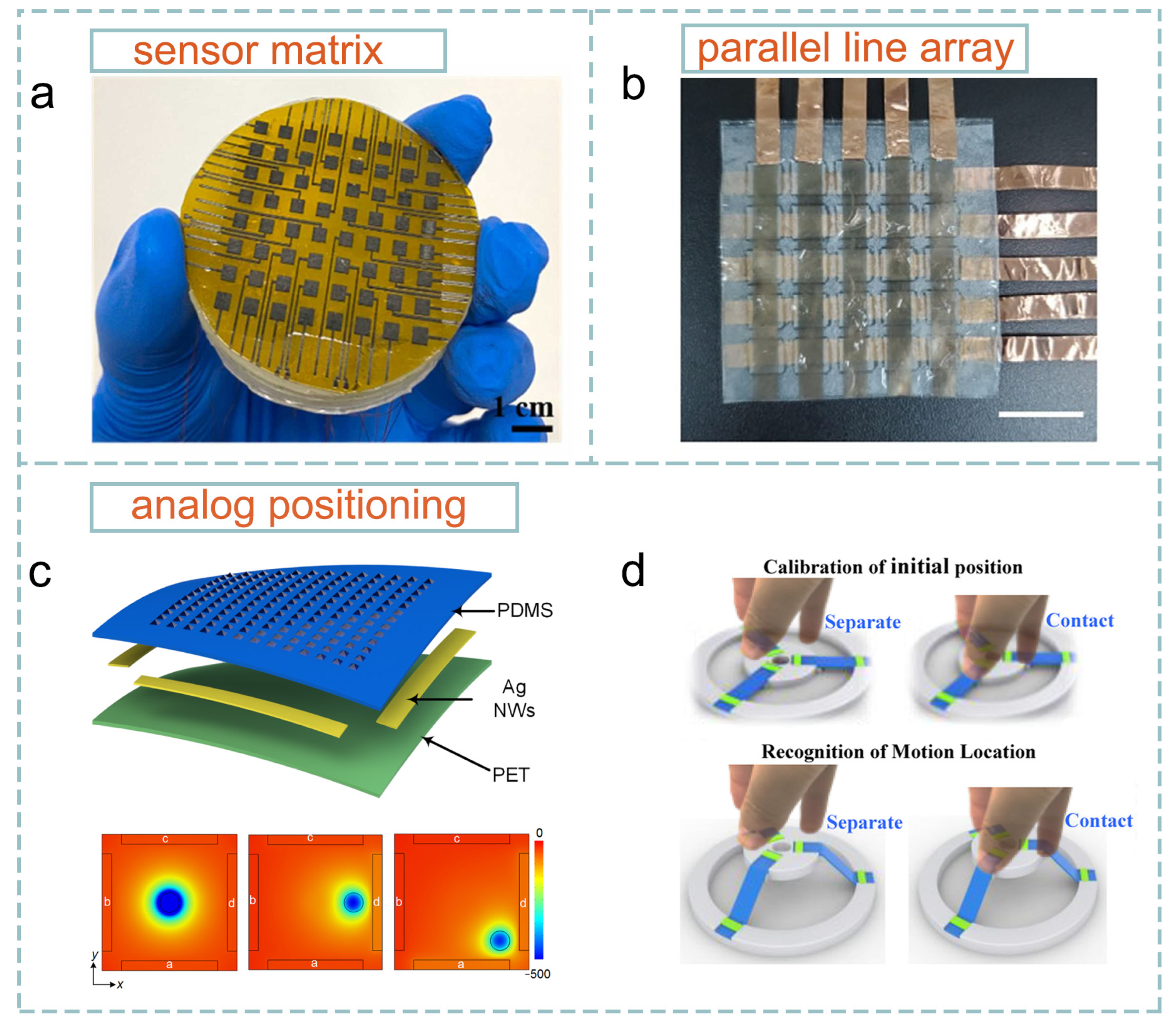
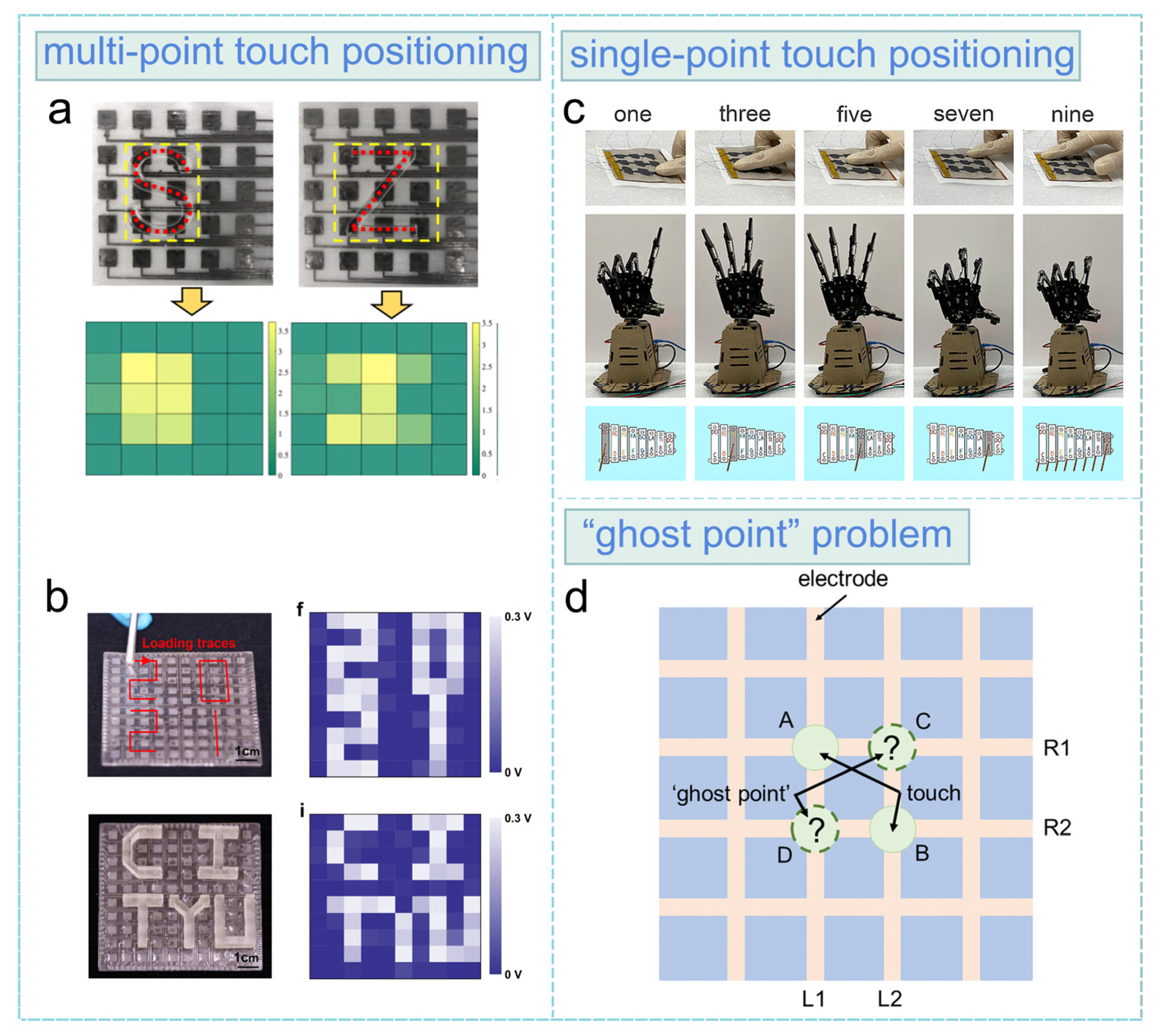
2.2.1. Sensor Matrix
2.2.2. Parallel Line Array
2.2.3. Analog Localization
3. Potential Functions Enabled by TCLE
3.1. Touch Positioning
3.2. Slide Detection
4. Applications of TCLE
4.1. HMI
4.2. E-Skin
4.3. IoT
5. Overview and Future Perspectives
- (1)
- In the development of the contact localization principle, the parallel line array strategy shows great potential in practical applications due to its manageable signal channel and cabling difficulties. Ongoing advancements in signal channel reduction methods are anticipated to further simplify signal processing and reduce power consumption. Conversely, the analog positioning strategy finds utility in specific scenarios where ultra-high resolution is essential; however, it necessitates noise-resistant and environment-insensitive designs to ensure robust performance under adverse working conditions.
- (2)
- In the function development of TCLE, a deeper exploration of the combination of TCLE and AI techniques might further improve the robustness and functional diversity of TCLE.
- (3)
- In TCLE applications, a flexible selection of the working principle is recommended, grounded in a deep understanding of the characteristics of different TCLE working principles and specific application requirements. Material engineering should align with application-specific needs, such as wearability, lightweight, and transparency, while innovative device designs are crucial for addressing challenges like cabling difficulties. Ongoing improvements in detection resolution, with an expected attainment of the millimeter level, are poised to open avenues for TCLE in commercial electronic applications. Simultaneously, large-area fabrication methods, coupled with corresponding device design optimizations, also offer significant practical value.
Funding
Conflicts of Interest
References
- Pyun, K.R.; Rogers, J.A.; Ko, S.H. Materials and Devices for Immersive Virtual Reality. Nat. Rev. Mater. 2022, 7, 841–843. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Dong, B.; He, T.; Sun, Z.; Zhu, J.; Zhang, Z.; Lee, C. Progress in wearable electronics/photonics—Moving toward the era of artificial intelligence and internet of things. InfoMat 2020, 2, 1131–1162. [Google Scholar] [CrossRef]
- Niu, Y.; Liu, H.; He, R.; Li, Z.; Ren, H.; Gao, B.; Guo, H.; Genin, G.M.; Xu, F. The new generation of soft and wearable electronics for health monitoring in varying environment: From normal to extreme conditions. Mater. Today 2020, 41, 219–242. [Google Scholar] [CrossRef]
- Zhao, Z.; Dai, Y.; Dou, S.X.; Liang, J. Flexible nanogenerators for wearable electronic applications based on piezoelectric materials. Mater. Today Energy 2021, 20, 100690. [Google Scholar] [CrossRef]
- Wang, K.; Yap, L.W.; Gong, S.; Wang, R.; Wang, S.J.; Cheng, W. Nanowire-Based Soft Wearable Human-Machine Interfaces for Future Virtual and Augmented Reality Applications. Adv. Funct. Mater. 2021, 31, 2008347. [Google Scholar] [CrossRef]
- Lam Po Tang, S. Recent Developments in Flexible Wearable Electronics for Monitoring Applications. Trans. Inst. Meas. Control 2007, 29, 283–300. [Google Scholar] [CrossRef]
- Sun, Z.; Zhu, M.; Lee, C. Progress in the Triboelectric Human-Machine Interfaces (HMIs)-Moving from Smart Gloves to AI/Haptic Enabled HMI in the 5G/IoT Era. Nanoenergy Adv. 2021, 1, 81–120. [Google Scholar] [CrossRef]
- Liu, J.; Tian, G.; Yang, W.; Deng, W. Recent progress in flexible piezoelectric devices toward human-machine interactions. Soft Sci. 2022, 2, 22. [Google Scholar]
- Kim, K.K.; Suh, Y.; Ko, S.H. Smart Stretchable Electronics for Advanced Human-Machine Interface. Adv. Intell. Syst. 2020, 3, 2000157. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, Z.; Zhang, F.; Wen, Z.; Sun, X. Recent Progress in Self-Powered Multifunctional e-Skin for Advanced Applications. Exploration 2022, 2, 20210112. [Google Scholar] [CrossRef]
- Zheng, Y.; Yin, R.; Zhao, Y.; Liu, H.; Zhang, D.; Shi, X.; Zhang, B.; Liu, C.; Shen, C. Conductive MXene/Cotton Fabric Based Pressure Sensor with Both High Sensitivity and Wide Sensing Range for Human Motion Detection and E-Skin. Chem. Eng. J. 2021, 420, 127720. [Google Scholar] [CrossRef]
- Hu, Z.; Wang, J.; Wang, Y.; Wang, C.; Wang, Y.; Zhang, Z.; Xu, P.; Zhao, T.; Luan, Y.; Liu, C.; et al. A Robust and Wearable Triboelectric Tactile Patch as Intelligent Human-Machine Interface. Materials 2021, 14, 6366. [Google Scholar] [CrossRef] [PubMed]
- Hao, S.; Jiao, J.; Chen, Y.; Wang, Z.L.; Cao, X. Natural Wood-Based Triboelectric Nanogenerator as Self-Powered Sensing for Smart Homes and Floors. Nano Energy 2020, 75, 104957. [Google Scholar] [CrossRef]
- Jeon, S.-B.; Kim, W.-G.; Park, S.-J.; Tcho, I.-W.; Jin, I.-K.; Han, J.-K.; Kim, D.; Choi, Y.-K. Self-Powered Wearable Touchpad Composed of All Commercial Fabrics Utilizing a Crossline Array of Triboelectric Generators. Nano Energy 2019, 65, 103994. [Google Scholar] [CrossRef]
- Feng, Y.; Huang, X.; Liu, S.; Guo, W.; Li, Y.; Wu, H. A Self-Powered Smart Safety Belt Enabled by Triboelectric Nanogenerators for Driving Status Monitoring. Nano Energy 2019, 62, 197–204. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, T.; Cai, J.; Xu, L.; He, T.; Wang, T.; Tian, Y.; Li, L.; Peng, Y.; Lee, C. Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications. Adv. Sci. 2022, 9, 2103694. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.; Wan, J.; Wang, H.; Wu, H.; Xu, C.; Miao, L.; Han, M.; Zhang, H. Self-Powered Intelligent Human-Machine Interaction for Handwriting Recognition. Research 2021, 2021, 4689869. [Google Scholar] [CrossRef] [PubMed]
- Fan, F.-R.; Tian, Z.-Q.; Lin Wang, Z. Flexible Triboelectric Generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Munirathinam, P.; Mathew, A.A.; Shanmugasundaram, V.; Vivekananthan, V.; Purusothaman, Y.; Kim, S.-J.; Chandrasekhar, A. A Comprehensive Review on Triboelectric Nanogenerators Based on Real-Time Applications in Energy Harvesting and Self-Powered Sensing. Mater. Sci. Eng. B 2023, 297, 116762. [Google Scholar] [CrossRef]
- Song, C.; Zhu, X.; Wang, M.; Yang, P.; Chen, L.; Hong, L.; Cui, W. Recent Advances in Ocean Energy Harvesting Based on Triboelectric Nanogenerators. Sustain. Energy Technol. Assess. 2022, 53, 102767. [Google Scholar] [CrossRef]
- Wei, Z.; Wang, J.; Liu, Y.; Yuan, J.; Liu, T.; Du, G.; Zhu, S.; Nie, S. Sustainable Triboelectric Materials for Smart Active Sensing Systems. Adv. Funct. Mater. 2022, 32, 2208277. [Google Scholar] [CrossRef]
- Lei, H.; Chen, Y.; Gao, Z.; Wen, Z.; Sun, X. Advances in Self-Powered Triboelectric Pressure Sensors. J. Mater. Chem. A 2021, 9, 20100–20130. [Google Scholar] [CrossRef]
- Yang, Y.; Guo, X.; Zhu, M.; Sun, Z.; Zhang, Z.; He, T.; Lee, C. Triboelectric Nanogenerator Enabled Wearable Sensors and Electronics for Sustainable Internet of Things Integrated Green Earth. Adv. Energy Mater. 2023, 13, 2203040. [Google Scholar] [CrossRef]
- Lin, L.; Xie, Y.; Wang, S.; Wu, W.; Niu, S.; Wen, X.; Wang, Z.L. Triboelectric Active Sensor Array for Self-Powered Static and Dynamic Pressure Detection and Tactile Imaging. ACS Nano 2013, 7, 8266–8274. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhang, H.; Lin, Z.-H.; Zhou, Y.S.; Jing, Q.; Su, Y.; Yang, J.; Chen, J.; Hu, C.; Wang, Z.L. Human Skin Based Triboelectric Nanogenerators for Harvesting Biomechanical Energy and as Self-Powered Active Tactile Sensor System. ACS Nano 2013, 7, 9213–9222. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.; Kim, J.; Jang, B.; Kim, S.; Sharma, B.K.; Kim, J.-H.; Ahn, J.-H. Graphene-Based Stretchable/Wearable Self-Powered Touch Sensor. Nano Energy 2019, 62, 259–267. [Google Scholar] [CrossRef]
- Liu, H.; Ji, Z.; Xu, H.; Sun, M.; Chen, T.; Sun, L.; Chen, G.; Wang, Z. Large-Scale and Flexible Self-Powered Triboelectric Tactile Sensing Array for Sensitive Robot Skin. Polymers 2017, 9, 586. [Google Scholar] [CrossRef]
- Lin, Z.; Yang, J.; Li, X.; Wu, Y.; Wei, W.; Liu, J.; Chen, J.; Yang, J. Large-Scale and Washable Smart Textiles Based on Triboelectric Nanogenerator Arrays for Self-Powered Sleeping Monitoring. Adv. Funct. Mater. 2018, 28, 1704112. [Google Scholar] [CrossRef]
- Jiang, X.-Z.; Sun, Y.-J.; Fan, Z.; Zhang, T.-Y. Integrated Flexible, Waterproof, Transparent, and Self-Powered Tactile Sensing Panel. ACS Nano 2016, 10, 7696–7704. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y.; Zhang, X.; Huo, Z.; Li, X.; Que, M.; Peng, Z.; Wang, H.; Pan, C. A Highly Stretchable Transparent Self-Powered Triboelectric Tactile Sensor with Metallized Nanofibers for Wearable Electronics. Adv. Mater. 2018, 30, 1706738. [Google Scholar] [CrossRef]
- Chen, T.; Shi, Q.; Li, K.; Yang, Z.; Liu, H.; Sun, L.; Dziuban, J.A.; Lee, C. Investigation of Position Sensing and Energy Harvesting of a Flexible Triboelectric Touch Pad. Nanomaterials 2018, 8, 613. [Google Scholar] [CrossRef] [PubMed]
- Ganesh, R.S.; Yoon, H.; Kim, S. Recent trends of biocompatible triboelectric nanogenerators toward self-powered e-skin. EcoMat 2020, 2, e12065. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiao, X.; Chen, G.; Zhao, X.; Chen, J. Self-Powered Sensing Technologies for Human Metaverse Interfacing. Joule 2022, 6, 1381–1389. [Google Scholar] [CrossRef]
- Lai, Z.; Xu, J.; Bowen, C.R.; Zhou, S. Self-powered and self-sensing devices based on human motion. Joule 2022, 6, 1501–1565. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Liu, Q.; Zhu, Y.; Wang, H.; Xie, Z.; Yu, X.; Zi, Y. A metal-electrode-free, fully integrated, soft triboelectric sensor array for self-powered tactile sensing. Microsyst. Nanoeng. 2020, 6, 59. [Google Scholar] [CrossRef] [PubMed]
- Tao, J.; Bao, R.; Wang, X.; Peng, Y.; Li, J.; Fu, S.; Pan, C.; Wang, Z.L. Self-Powered Tactile Sensor Array Systems Based on the Triboelectric Effect. Adv. Funct. Mater. 2019, 29, 1806379. [Google Scholar] [CrossRef]
- Shi, M.; Zhang, J.; Chen, H.; Han, M.; Shankaregowda, S.A.; Su, Z.; Meng, B.; Cheng, X.; Zhang, H. Self-Powered Analogue Smart Skin. ACS Nano 2016, 10, 4083–4091. [Google Scholar] [CrossRef]
- Zhang, Z.; He, T.; Zhu, M.; Sun, Z.; Shi, Q.; Zhu, J.; Dong, B.; Yuce, M.R.; Lee, C. Deep learning-enabled triboelectric smart socks for IoT-based gait analysis and VR applications. NPJ Flex. Electron. 2020, 4, 29. [Google Scholar] [CrossRef]
- Qiu, C.; Wu, F.; Lee, C.; Yuce, M.R. Self-Powered Control Interface Based on Gray Code with Hybrid Triboelectric and Photovoltaics Energy Harvesting for IoT Smart Home and Access Control Applications. Nano Energy 2020, 70, 104456. [Google Scholar] [CrossRef]
- Guo, H.; Wang, H.; Xiang, Z.; Wu, H.; Wan, J.; Xu, C.; Chen, H.; Han, M.; Zhang, H. Soft Human-Machine Interface with Triboelectric Patterns and Archimedes Spiral Electrodes for Enhanced Motion Detection. Adv. Funct. Mater. 2021, 31, 2103075. [Google Scholar] [CrossRef]
- Ba, Y.-Y.; Bao, J.-F.; Wang, Z.-Y.; Deng, H.-T.; Wen, D.-L.; Zhang, X.-R.; Tu, C.; Zhang, X.-S. Self-Powered Trajectory-Tracking Microsystem Based on Electrode-Miniaturized Triboelectric Nanogenerator. Nano Energy 2021, 82, 105730. [Google Scholar] [CrossRef]
- Saha, K.; Chatterjee, A.; Das, A.; Ghorai, A.; Jeong, U. Self-powered ionic tactile sensors. J. Mater. Chem. C 2023, 11, 7920–7936. [Google Scholar] [CrossRef]
- Liu, Y.; Bao, R.; Tao, J.; Li, J.; Dong, M.; Pan, C. Recent Progress in Tactile Sensors and Their Applications in Intelligent Systems. Sci. Bull. 2020, 65, 70–88. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Yang, N.; Xu, Q.; Dai, Y.; Wang, Z. Recent Advances in Flexible Tactile Sensors for Intelligent Systems. Sensors 2021, 21, 5392. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.-G.; Kim, D.-W.; Tcho, I.-W.; Kim, J.-K.; Kim, M.-S.; Choi, Y.-K. Triboelectric Nanogenerator: Structure, Mechanism, and Applications. ACS Nano 2021, 15, 258–287. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Dharmasena, R.D.I.G.; Deane, J.H.B.; Silva, S.R.P. Nature of Power Generation and Output Optimization Criteria for Triboelectric Nanogenerators. Adv. Energy Mater. 2018, 8, 1802190. [Google Scholar] [CrossRef]
- Cai, Y.-W.; Zhang, X.-N.; Wang, G.-G.; Li, G.-Z.; Zhao, D.-Q.; Sun, N.; Li, F.; Zhang, H.-Y.; Han, J.-C.; Yang, Y. A Flexible Ultra-Sensitive Triboelectric Tactile Sensor of Wrinkled PDMS/MXene Composite Films for E-Skin. Nano Energy 2021, 81, 105663. [Google Scholar] [CrossRef]
- Hwang, B.-U.; Zabeeb, A.; Trung, T.Q.; Wen, L.; Lee, J.D.; Choi, Y.-I.; Lee, H.-B.; Kim, J.H.; Han, J.G.; Lee, N.-E. A transparent stretchable sensor for distinguishable detection of touch and pressure by capacitive and piezoresistive signal transduction. NPG Asia Mater. 2019, 11, 23. [Google Scholar] [CrossRef]
- Bai, Y.; Xu, L.; Lin, S.; Luo, J.; Qin, H.; Han, K.; Wang, Z.L. Charge Pumping Strategy for Rotation and Sliding Type Triboelectric Nanogenerators. Adv. Energy Mater. 2020, 10, 2000605. [Google Scholar] [CrossRef]
- Cui, N.; Dai, C.; Liu, J.; Gu, L.; Ge, R.; Du, T.; Wang, Z.; Qin, Y. Increasing the Output Charge Quantity of Triboelectric Nanogenerators via Frequency Multiplication with a Multigap-Structured Friction Layer. Energy Environ. Sci. 2020, 13, 2069–2076. [Google Scholar] [CrossRef]
- He, W.; Shan, C.; Wu, H.; Fu, S.; Li, Q.; Li, G.; Zhang, X.; Du, Y.; Wang, J.; Wang, X.; et al. Capturing Dissipation Charge in Charge Space Accumulation Area for Enhancing Output Performance of Sliding Triboelectric Nanogenerator. Adv. Energy Mater. 2022, 12, 2201454. [Google Scholar] [CrossRef]
- Wang, H.; Sakamoto, H.; Asai, H.; Zhang, J.-H.; Meboso, T.; Uchiyama, Y.; Kobayashi, E.; Takamura, E.; Suye, S.-I. An All-Fibrous Triboelectric Nanogenerator with Enhanced Outputs Depended on the Polystyrene Charge Storage Layer. Nano Energy 2021, 90, 106515. [Google Scholar] [CrossRef]
- Guo, W.; Xia, Y.; Zhu, Y.; Han, S.; Li, Q.; Wang, X. Laser-Induced Graphene Based Triboelectric Nanogenerator for Accurate Wireless Control and Tactile Pattern Recognition. Nano Energy 2023, 108, 108229. [Google Scholar] [CrossRef]
- Qu, X.; Xue, J.; Liu, Y.; Rao, W.; Liu, Z.; Li, Z. Fingerprint-shaped triboelectric tactile sensor. Nano Energy 2022, 98, 107324. [Google Scholar] [CrossRef]
- Pu, X.; Liu, M.; Chen, X.; Sun, J.; Du, C.; Zhang, Y.; Zhai, J.; Hu, W.; Wang, Z.L. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Sci. Adv. 2017, 3, e1700015. [Google Scholar] [CrossRef]
- Lin, Y.; Duan, S.; Zhu, D.; Li, Y.; Wang, B.; Wu, J. Self-Powered and Interface-Independent Tactile Sensors Based on Bilayer Single-Electrode Triboelectric Nanogenerators for Robotic Electronic Skin. Adv. Intell. Syst. 2023, 5, 2100120. [Google Scholar] [CrossRef]
- Chen, T.; Shi, Q.; Zhu, M.; He, T.; Yang, Z.; Liu, H.; Sun, L.; Yang, L.; Lee, C. Intuitive-Augmented Human-Machine Multidimensional Nano-Manipulation Terminal Using Triboelectric Stretchable Strip Sensors Based on Minimalist Design. Nano Energy 2019, 60, 440–448. [Google Scholar] [CrossRef]
- Yang, J.; Xu, W.; Liu, S.; Liu, S.; Feng, D.; Meng, Y.; Wang, M.; Li, X. Self-Powered Hybrid Wearable E-Skin for Artificial Intelligence Sensing System. In Proceedings of the 2021 IEEE 34th International Conference on Micro Electro Mechanical Systems (MEMS), Gainesville, FL, USA, 25–29 January 2021; pp. 107–110. [Google Scholar] [CrossRef]
- Pratap, A.; Gogurla, N.; Kim, S. Elastic and Skin-Contact Triboelectric Nanogenerators and Their Applicability in Energy Harvesting and Tactile Sensing. ACS Appl. Electron. Mater. 2022, 4, 1124–1131. [Google Scholar] [CrossRef]
- Zhang, J.; Song, Z.; Guo, H.; Song, Y.; Yu, B.; Zhang, H. GPS-Inspired Stretchable Self-Powered Electronic Skin. IEEE Trans. Nanotechnol. 2018, 17, 460–466. [Google Scholar] [CrossRef]
- Li, T.; Zou, J.; Xing, F.; Zhang, M.; Cao, X.; Wang, N.; Wang, Z.L. From dual-mode triboelectric nanogenerator to smart tactile sensor: A multiplexing design. ACS Nano 2017, 11, 3950–3956. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Wu, D.; Hao, S.; Jie, Y.; Cao, X.; Wang, N.; Wang, Z.L. Highly stretchable triboelectric tactile sensor for electronic skin. Nano Energy 2019, 64, 103907. [Google Scholar] [CrossRef]
- Jiang, D.; Lian, M.; Xu, M.; Sun, Q.; Bin Xu, B.; Thabet, H.K.; El-Bahy, S.M.; Ibrahim, M.M.; Huang, M.; Guo, Z. Advances in Triboelectric Nanogenerator Technology—Applications in Self-Powered Sensors, Internet of Things, Biomedicine, and Blue Energy. Adv. Compos. Hybrid Mater. 2023, 6, 57. [Google Scholar] [CrossRef]
- Nguyen, J.T.; Cheng, W. A Review on Epidermal Nanogenerators: Recent Progress of the Future Self-Powered Skins. Small Struct. 2022, 3, 2200034. [Google Scholar] [CrossRef]
- Li, H.; Fang, X.; Li, R.; Liu, B.; Tang, H.; Ding, X.; Xie, Y.; Zhou, R.; Zhou, G.; Tang, Y. All-Printed Soft Triboelectric Nanogenerator for Energy Harvesting and Tactile Sensing. Nano Energy 2020, 78, 105288. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Wu, M.; Yao, K.; Gao, Z.; Gao, Y.; Huang, X.; Wong, T.H.; Zhou, J.; Li, D.; et al. Thin, Soft, 3D Printing Enabled Crosstalk Minimized Triboelectric Nanogenerator Arrays for Tactile Sensing. Fundam. Res. 2023, 3, 111–117. [Google Scholar] [CrossRef]
- Zhang, S.; Xiao, Y.; Chen, H.; Zhang, Y.; Liu, H.; Qu, C.; Shao, H.; Xu, Y. Flexible Triboelectric Tactile Sensor Based on a Robust MXene/Leather Film for Human-Machine Interaction. ACS Appl. Mater. Interfaces 2023, 15, 13802–13812. [Google Scholar] [CrossRef]
- Barrett, G.; Omote, R. Projected-Capacitive Touch Technology. Inf. Disp. 2010, 26, 16–21. [Google Scholar] [CrossRef]
- Hu, H.; Zhang, F. Rational design of self-powered sensors with polymer nanocomposites for human-machine interaction. Chin. J. Aeronaut. 2022, 35, 155–177. [Google Scholar] [CrossRef]
- Hu, C.; Wang, F.; Cui, X.; Zhu, Y. Recent progress in textile-based triboelectric force sensors for wearable electronics. Adv. Compos. Hybrid Mater. 2023, 6, 70. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, H.; Sang, S. An In-Plane Sliding Triboelectric Nanogenerator with a Multielectrode Array for Self-Powered Dynamic Addressing and Trajectory Tracking. Energy Technol. 2020, 8, 2000155. [Google Scholar] [CrossRef]
- Cui, X.; Zhao, T.; Yang, S.; Xie, G.; Zhang, Z.; Zhang, Y.; Sang, S.; Lin, Z.-H.; Zhang, W.; Zhang, H. A Spongy Electrode-Brush-Structured Dual-Mode Triboelectric Nanogenerator for Harvesting Mechanical Energy and Self-Powered Trajectory Tracking. Nano Energy 2020, 78, 105381. [Google Scholar] [CrossRef]
- Guo, H.; Wan, J.; Wu, H.; Wang, H.; Miao, L.; Song, Y.; Chen, H.; Han, M.; Zhang, H. Self-Powered Multifunctional Electronic Skin for a Smart Anti-Counterfeiting Signature System. ACS Appl. Mater. Interfaces 2020, 12, 22357–22364. [Google Scholar] [CrossRef]
- Yu, S.; Park, T.H.; Jiang, W.; Lee, S.W.; Kim, E.H.; Lee, S.; Park, J.-E.; Park, C. Soft Human-Machine Interface Sensing Displays: Materials and Devices. Adv. Mater. 2023, 35, e2204964. [Google Scholar] [CrossRef]
- Singh, H.P.; Kumar, P. Developments in the Human Machine Interface Technologies and Their Applications: A Review. J. Med. Eng. Technol. 2021, 45, 552–573. [Google Scholar] [CrossRef]
- Nie, B.; Liu, S.; Qu, Q.; Zhang, Y.; Zhao, M.; Liu, J. Bio-Inspired Flexible Electronics for Smart E-Skin. Acta Biomater. 2022, 139, 280–295. [Google Scholar] [CrossRef]
- Bunea, A.-C.; Dediu, V.; Laszlo, E.A.; Pistriţu, F.; Carp, M.; Iliescu, F.S.; Ionescu, O.N.; Iliescu, C. E-Skin: The Dawn of a New Era of On-Body Monitoring Systems. Micromachines 2021, 12, 1091. [Google Scholar] [CrossRef]
- Bin Zikria, Y.; Ali, R.; Afzal, M.K.; Kim, S.W. Next-Generation Internet of Things (IoT): Opportunities, Challenges, and Solutions. Sensors 2021, 21, 1174. [Google Scholar] [CrossRef]
- Laghari, A.A.; Wu, K.; Laghari, R.A.; Ali, M.; Khan, A.A. A Review and State of Art of Internet of Things (IoT). Arch. Comput. Methods Eng. 2022, 29, 1395–1413. [Google Scholar] [CrossRef]
- Lee, Y.; Lim, S.; Song, W.J.; Lee, S.; Yoon, S.J.; Park, J.-M.; Lee, M.-G.; Park, Y.-L.; Sun, J.-Y. Triboresistive Touch Sensing: Grid-Free Touch-Point Recognition Based on Monolayered Ionic Power Generators. Adv. Mater. 2022, 34, e2108586. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Shi, Q.; Zhu, M.; He, T.; Sun, L.; Yang, L.; Lee, C. Triboelectric self-powered wearable flexible patch as 3D motion control interface for robotic manipulator. ACS Nano 2018, 12, 11561–11571. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Qiu, C.; He, T.; Wu, F.; Zhu, M.; Dziuban, J.A.; Walczak, R.; Yuce, M.R.; Lee, C. Triboelectric single-electrode-output control interface using patterned grid electrode. Nano Energy 2019, 60, 545–556. [Google Scholar] [CrossRef]
- Alagumalai, A.; Shou, W.; Mahian, O.; Aghbashlo, M.; Tabatabaei, M.; Wongwises, S.; Liu, Y.; Zhan, J.; Torralba, A.; Chen, J.; et al. Self-Powered Sensing Systems with Learning Capability. Joule 2022, 6, 1475–1500. [Google Scholar] [CrossRef]
- Jiao, P. Emerging Artificial Intelligence in Piezoelectric and Triboelectric Nanogenerators. Nano Energy 2021, 88, 106227. [Google Scholar] [CrossRef]
- Wang, M.; Wang, T.; Luo, Y.; He, K.; Pan, L.; Li, Z.; Cui, Z.; Liu, Z.; Tu, J.; Chen, X. Fusing Stretchable Sensing Technology with Machine Learning for Human-Machine Interfaces. Adv. Funct. Mater. 2021, 31, 2008807. [Google Scholar] [CrossRef]
- Shafiq, M.; Gu, Z. Deep Residual Learning for Image Recognition: A Survey. Appl. Sci. 2022, 12, 8972. [Google Scholar] [CrossRef]
- Yun, J.; Jayababu, N.; Kim, D. Self-Powered Transparent and Flexible Touchpad Based on Triboelectricity towards Artificial Intelligence. Nano Energy 2020, 78, 105325. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, Z.; Wang, J.; Liu, X.; Shi, Q.; Wang, Y.; Qiao, L.; Li, Y.; Yang, H.; Liu, J.; et al. Deep Learning-Assisted Triboelectric Smart Mats for Personnel Comprehensive Monitoring toward Maritime Safety. ACS Appl. Mater. Interfaces 2022, 14, 24832–24839. [Google Scholar] [CrossRef]
- Chen, Y.; Deng, Z.; Ouyang, R.; Zheng, R.; Jiang, Z.; Bai, H.; Xue, H. 3D Printed Stretchable Smart Fibers and Textiles for Self-Powered e-Skin. Nano Energy 2021, 84, 105866. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Z.; Liao, Q.; Xun, X.; Gao, F.; Xu, L.; Kang, Z.; Zhang, Y. Self-powered user-interactive electronic skin for programmable touch operation platform. Sci. Adv. 2020, 6, eaba4294. [Google Scholar] [CrossRef] [PubMed]
- Lei, H.; Xiao, J.; Chen, Y.; Jiang, J.; Xu, R.; Wen, Z.; Dong, B.; Sun, X. Bamboo-Inspired Self-Powered Triboelectric Sensor for Touch Sensing and Sitting Posture Monitoring. Nano Energy 2022, 91, 106670. [Google Scholar] [CrossRef]
- Shi, X.; Luo, J.; Luo, J.; Li, X.; Han, K.; Li, D.; Cao, X.; Wang, Z.L. Flexible Wood-Based Triboelectric Self-Powered Smart Home System. ACS Nano 2022, 16, 3341–3350. [Google Scholar] [CrossRef] [PubMed]
- Dolbashid, A.S.; Mokhtar, M.S.; Muhamad, F.; Ibrahim, F. Potential applications of human artificial skin and electronic skin (e-skin): A review. Bioinspired Biomim. Nanobiomat. 2018, 7, 53–64. [Google Scholar] [CrossRef]
- Dahiya, R.; Yogeswaran, N.; Liu, F.; Manjakkal, L.; Burdet, E.; Hayward, V.; Jörntell, H. Large-Area Soft e-Skin: The Challenges Beyond Sensor Designs. Proc. IEEE 2019, 107, 2016–2033. [Google Scholar] [CrossRef]
- Sun, Q.; Lai, Q.; Tang, Z.; Tang, X.; Zhao, X.; Roy, V.A.L. Advanced Functional Composite Materials toward E-Skin for Health Monitoring and Artificial Intelligence. Adv. Mater. Technol. 2022, 8, 2201088. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.; Wang, J.; Wang, Z.L. Triboelectric nanogenerators: Fundamental physics and potential applications. Friction 2020, 8, 481–506. [Google Scholar] [CrossRef]
- Hossein Motlagh, N.; Mohammadrezaei, M.; Hunt, J.; Zakeri, B. Internet of Things (IoT) and the Energy Sector. Energies 2020, 13, 494. [Google Scholar] [CrossRef]
- Kim, B.; Song, J.Y.; Kim, D.Y.; Kim, M.-C.; Lin, Z.-H.; Choi, D.; Park, S.M. All-Aerosol-Sprayed High-Performance Transparent Triboelectric Nanogenerator with Embedded Charge-Storage Layer for Self-Powered Invisible Security IoT System and Raindrop-Solar Hybrid Energy Harvester. Nano Energy 2022, 104, 107878. [Google Scholar] [CrossRef]
- Zhou, K.; Zhao, Y.; Sun, X.; Yuan, Z.; Zheng, G.; Dai, K.; Mi, L.; Pan, C.; Liu, C.; Shen, C. Ultra-Stretchable Triboelectric Nanogenerator as High-Sensitive and Self-Powered Electronic Skins for Energy Harvesting and Tactile Sensing. Nano Energy 2020, 70, 104546. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Du, W.; Zhao, Y.; Wang, W.; Pang, L.; Chen, L.; Yu, A.; Zhai, J. Self-Powered Triboelectric-Mechanoluminescent Electronic Skin for Detecting and Differentiating Multiple Mechanical Stimuli. Nano Energy 2022, 96, 107115. [Google Scholar] [CrossRef]
- Bhalla, M.R.; Bhalla, A.V. Comparative Study of Various Touchscreen Technologies. Int. J. Comput. Appl. 2010, 6, 12–18. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Principle | Signal Channels | Wiring | Main Error Source |
|---|---|---|---|
| Sensor Matrix | Large | Complex | Mal-triggering of sensor units |
| Parallel Line Array | Moderate | Simple | - |
| Analog Localization | Small | Simple | Noise, device deformation |
| Application Scene | Size | Stretchability | Resolution | Ref. |
|---|---|---|---|---|
| Touchpad | 10 cm × 10 cm | - | 1.25 cm × 1.25 cm | [35] |
| Touchpad | 8 cm × 8 cm | - | 1.6 cm × 1.6 cm | [75] |
| e-skin | 1 cm × 1 cm (a unit cell) | 200% | - | [101] |
| e-skin | 6 cm × 6 cm | 130% (for a sensor unit) | 1.4 cm × 1.4 cm | [102] |
| Footstep detection mat | 1.0 m × 1.15 m | - | 11 cm × 11cm | [100] |
| Smart floor | 40 cm × 60 cm | - | 8 cm × 12 cm | [13] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Ren, Q.; Li, J.; Xu, J.; Bai, G.; Zhu, C.; Li, W. Triboelectric Contact Localization Electronics: A Systematic Review. Sensors 2024, 24, 449. https://doi.org/10.3390/s24020449
Xu W, Ren Q, Li J, Xu J, Bai G, Zhu C, Li W. Triboelectric Contact Localization Electronics: A Systematic Review. Sensors. 2024; 24(2):449. https://doi.org/10.3390/s24020449
Chicago/Turabian StyleXu, Wei, Qingying Ren, Jinze Li, Jie Xu, Gang Bai, Chen Zhu, and Wei Li. 2024. "Triboelectric Contact Localization Electronics: A Systematic Review" Sensors 24, no. 2: 449. https://doi.org/10.3390/s24020449