
Distributed Sensitivity and Critical Interference Power Analysis of Multi-Degree-of-Freedom Navigation Interference for Global Navigation Satellite System Array Antennas


Abstract
:1. Introduction
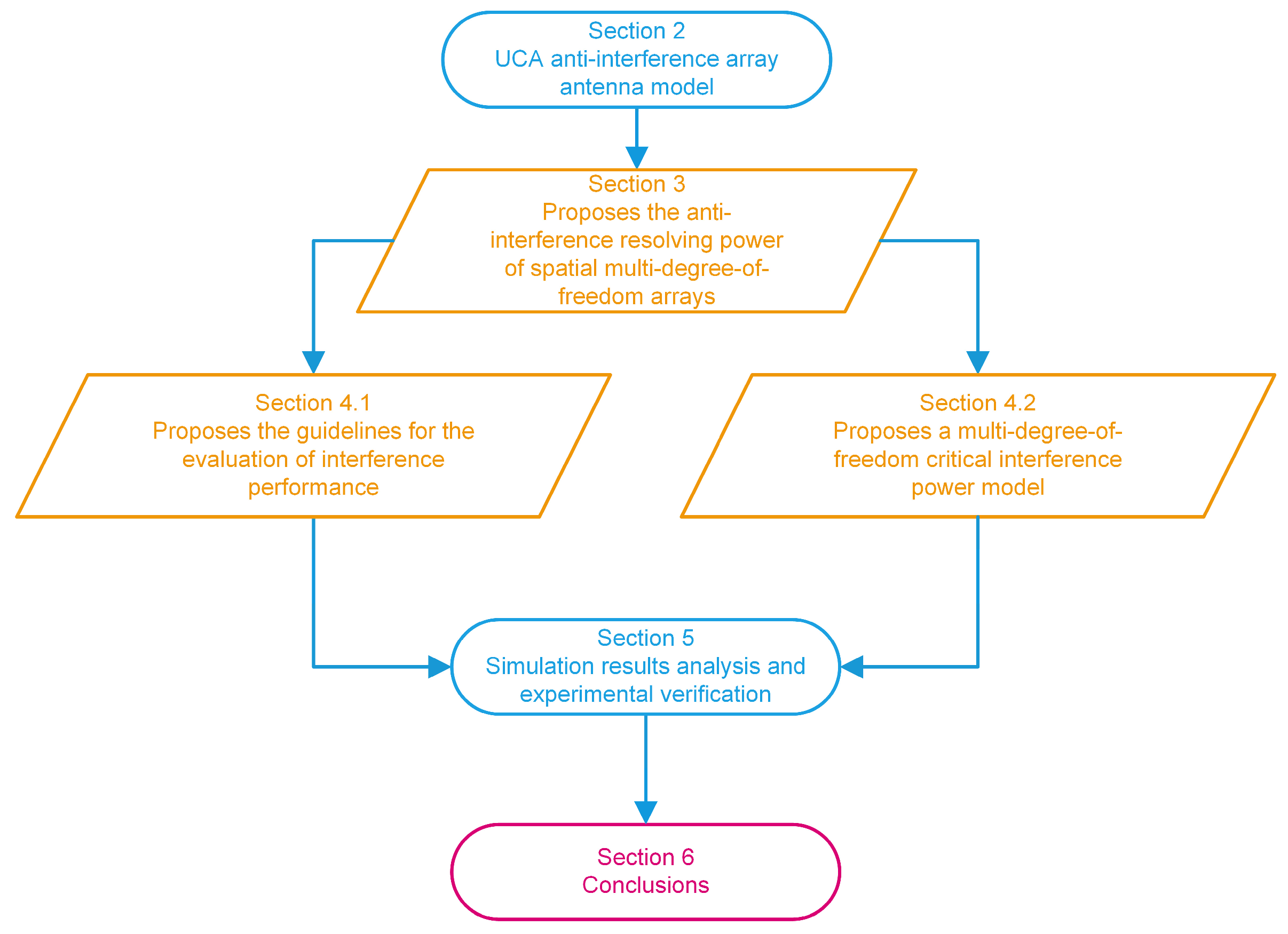
2. Anti-Jamming Array Antenna Modeling
- (1)
- The size of each element is much smaller than the wavelength of the incident signal, which can be regarded as a point element at this time;
- (2)
- The system noise is additive Gaussian white noise with mean zero and variance , and the noise between the array elements, useful signal, and noise are independent of each other;
- (3)
- The research content of this paper is the effect of a far-field interference signal on the array antenna, without considering the mutual coupling effect between the array elements and the channel inconsistency problem.
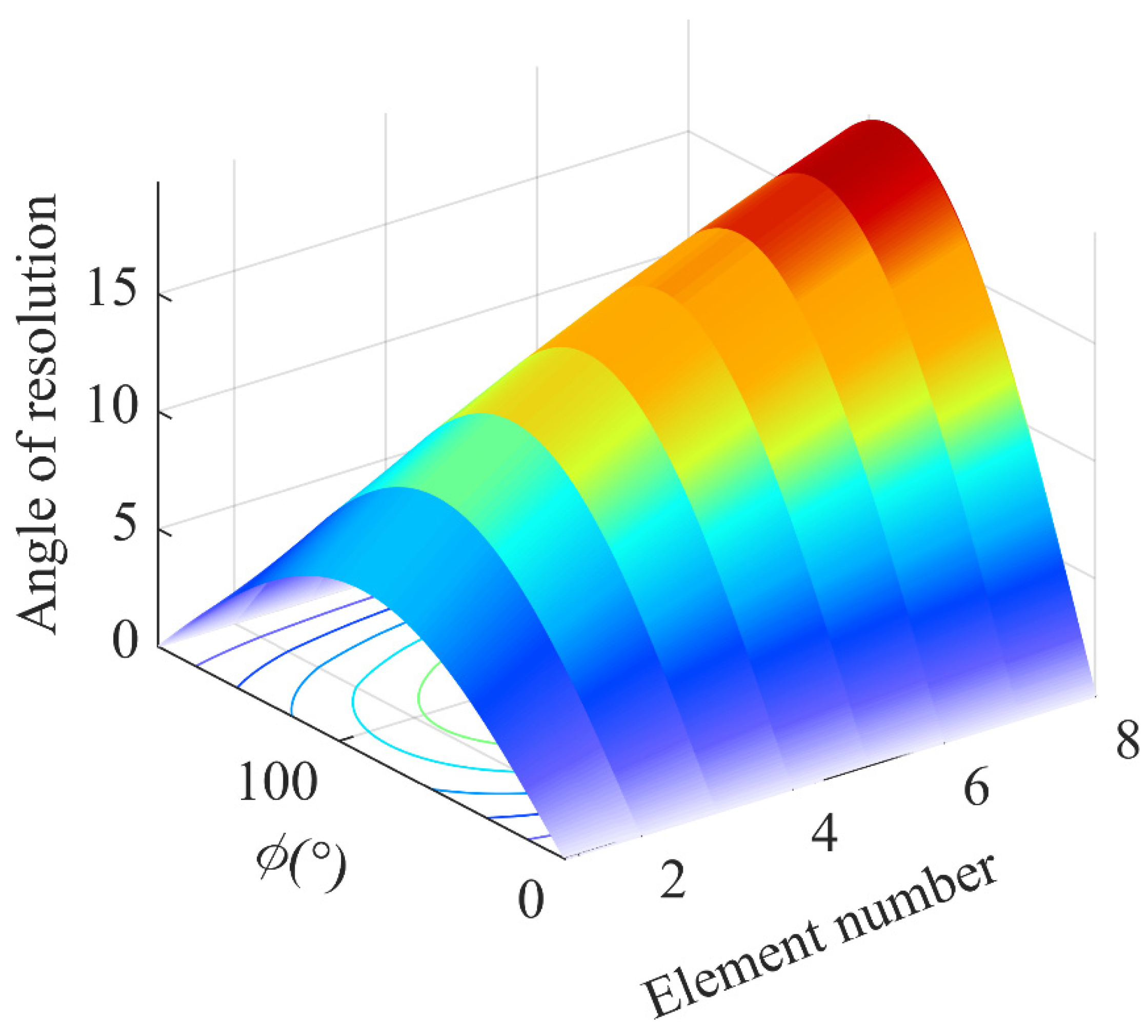
3. Uniform Circular Array Anti-Interference Resolution
3.1. Concept
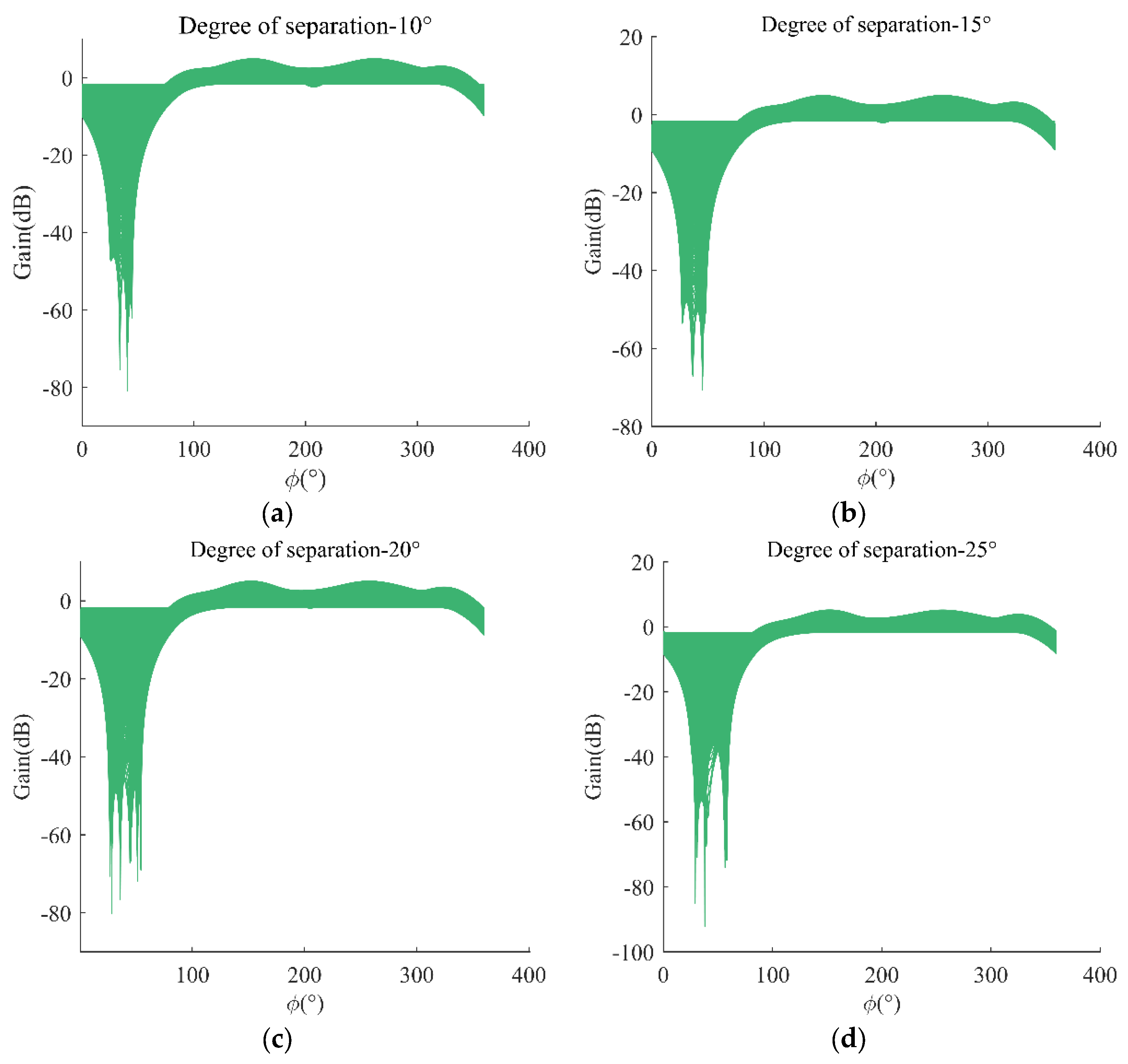
3.2. Simulation Verification of Section 3.1
3.2.1. Simulation Scenario 1
3.2.2. Simulation Scenario 2
4. Efficacy Analysis of Interference with Different Degrees of Freedom
4.1. Adaptive Array Criteria and Power Inversion Algorithms
4.2. Interference Performance Evaluation Criteria
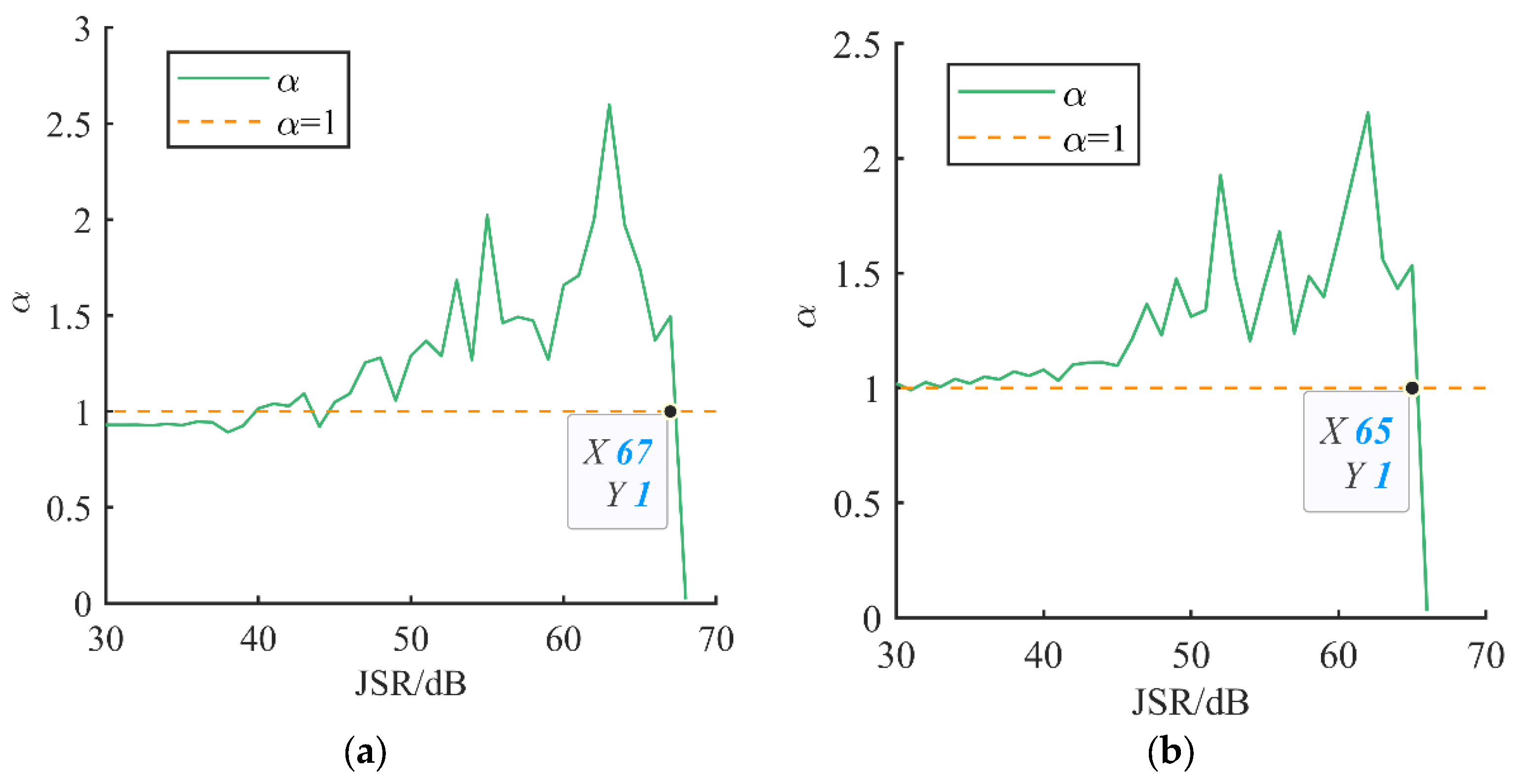
4.2.1. Critical Power When the Number of Interfering Signals Is Less Than or Equal to Array Antenna Degrees of Freedom
4.2.2. Critical Power When Number of Interfering Signals Is Greater Than Array Antenna Degrees of Freedom
5. Simulation Analysis and Experimental Validation of Section 4
5.1. Simulation Analysis
5.1.1. Simulation Parameter Settings
5.1.2. Simulation Scenario 3
5.1.3. Simulation Scenario 4
5.2. Experimental Verification
5.2.1. Equipment Installation
5.2.2. Comparison of Simulation and Test Results
6. Conclusions
- (1)
- Assuming that the interfering signals are independent of each other, the azimuthal interval of the interfering signals must be greater than 15° for multi-DOF jamming of a four-array element UCA antenna;
- (2)
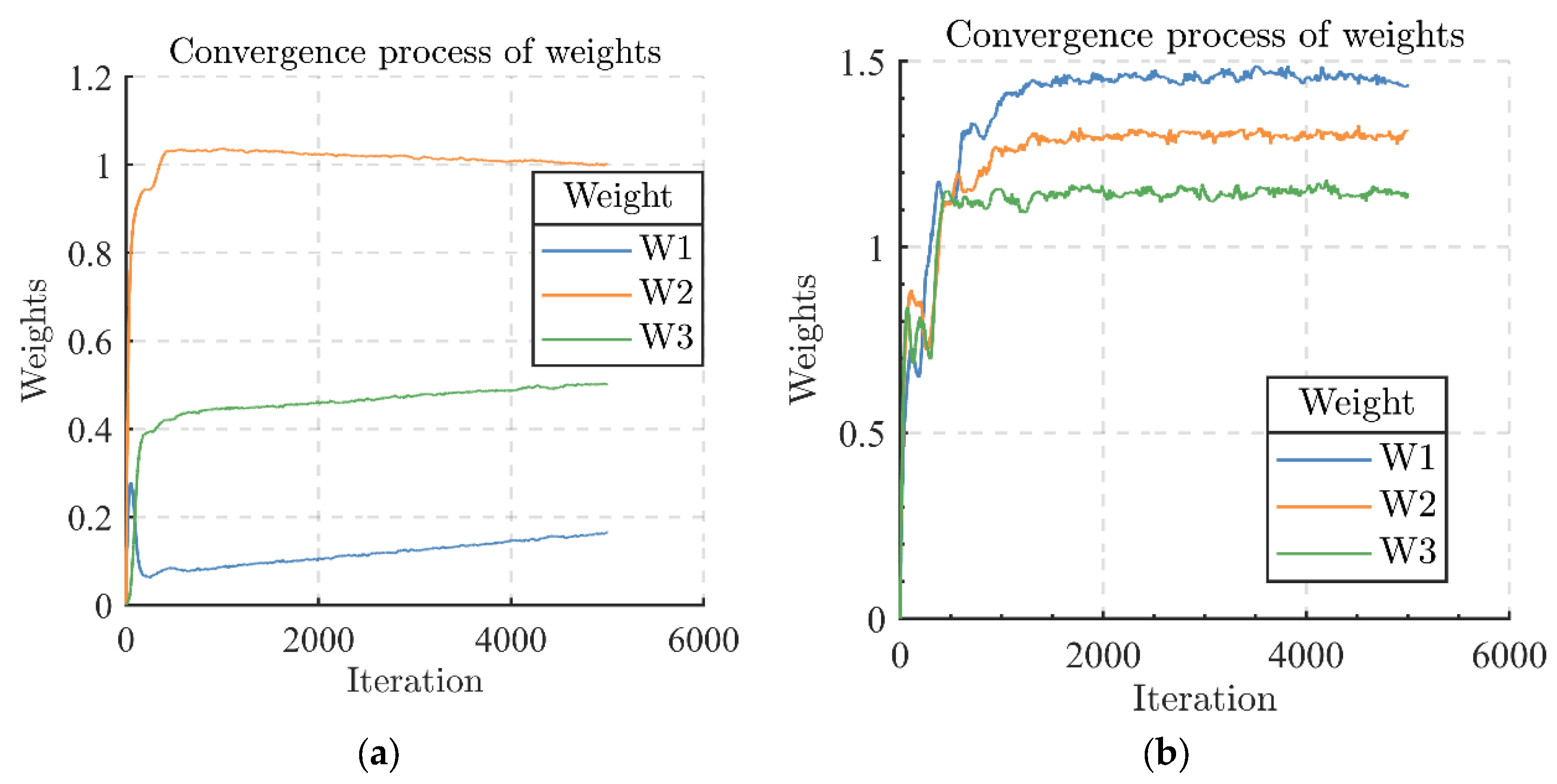
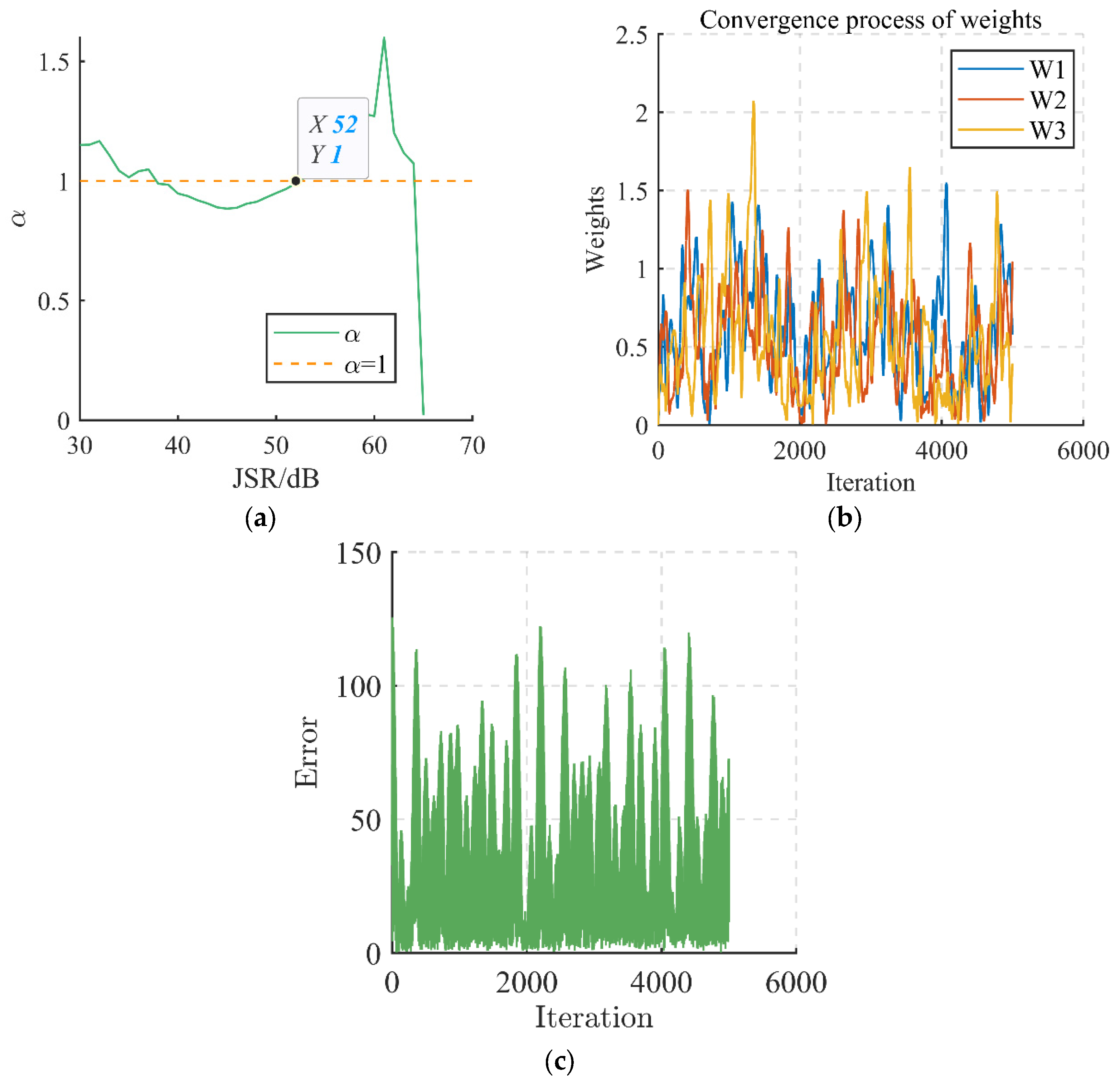
- The four-array UCA antenna’s weight array and signal error do not converge during super-DOF jamming, and the jamming signal cannot be processed effectively;
- (3)
- For four-array UCA interference, when the number of interfering signals does not exceed the anti-jamming degrees of freedom, the critical interference power decreases by about 3 dB for each additional interfering signal, and the critical interference power decreases by about 15 dB in the case of super-DOF interference.
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jafarnia Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. GPS Spoofer Countermeasure Effectiveness Based on Signal Strength, Noise Power, and C/N0 Measurements: Effectiveness of GPS spoofing detection based on C/N0 measurement. Int. J. Satell. Commun. Netw. 2012, 30, 181–191. [Google Scholar] [CrossRef]
- Lo, S.; Gao, G. Front Matter. In Position, Navigation, and Timing Technologies in the 21st Century; Morton, Y.T.J., Diggelen, F., Spilker, J.J., Parkinson, B.W., Lo, S., Gao, G., Eds.; Wiley: Hoboken, NJ, USA, 2020; ISBN 978-1-119-45841-8. [Google Scholar]
- Taylor, J.D. (Ed.) Ultrawideband Radar: Applications and Design; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Morong, T.; Puricer, P.; Kovář, P. Study of the GNSS Jamming in Real Environment. Int. J. Electron. Telecommun. 2019, 65, 65–70. [Google Scholar] [CrossRef]
- Magiera, J.; Katulski, R. Detection and Mitigation of GPS Spoofing Based on Antenna Array Processing. J. Appl. Res. Technol. 2015, 13, 45–57. [Google Scholar] [CrossRef]
- Shepard, D.P.; Humphreys, T.E.; Fansler, A.A. Evaluation of the Vulnerability of Phasor Measurement Units to GPS Spoofing Attacks. Int. J. Crit. Infrastruct. Prot. 2012, 5, 146–153. [Google Scholar] [CrossRef]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned Aircraft Capture and Control via GPS Spoofing: Unmanned Aircraft Capture and Control. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Gupta, I.J.; Weiss, I.M.; Morrison, A.W. Desired Features of Adaptive Antenna Arrays for GNSS Receivers. Proc. IEEE 2016, 104, 1195–1206. [Google Scholar] [CrossRef]
- Wang, J.; Ou, G.; Liu, W.; Chen, F. Characteristic Analysis on Anti-Jamming Degrees of Freedom of GNSS Array Receiver. In Proceedings of the China Satellite Navigation Conference (CSNC 2022), Beijing, China, 22–25 May 2022; Yang, C., Xie, J., Eds.; Lecture Notes in Electrical Engineering. Springer Nature: Singapore, 2022; Volume 908, pp. 463–472, ISBN 978-981-19258-7-0. [Google Scholar]
- Abdulkarim, Y.I.; Xiao, M.; Awl, H.N.; Muhammadsharif, F.F.; Lang, T.; Saeed, S.R.; Alkurt, F.Ö.; Bakır, M.; Karaaslan, M.; Dong, J. Simulation and Lithographic Fabrication of a Triple Band Terahertz Metamaterial Absorber Coated on Flexible Polyethylene Terephthalate Substrate. Opt. Mater. Express 2022, 12, 338. [Google Scholar] [CrossRef]
- Mitch, R.H.; Dougherty, R.C.; Psiaki, M.L.; Powell, S.P.; O’Hanlon, B.W.; Bhatti, J.A.; Humphreys, T.E. Signal Characteristics of Civil GPS Jammers. In Proceedings of the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011. [Google Scholar]
- Potts, D.; Tasche, M.; Volkmer, T. Efficient Spectral Estimation by MUSIC and ESPRIT with Application to Sparse FFT. Front. Appl. Math. Stat. 2016, 2, 1. [Google Scholar] [CrossRef]
- Yan, D.; Ni, S. Overview of Anti-Jamming Technologies for Satellite Navigation Systems. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4 March 2022; pp. 118–124. [Google Scholar]
- Sun, Y.; Chen, F.; Wang, F.; Liu, W.; Li, B.; Song, J. Direction and Distribution Sensitivity of Sup-DOF Interference Suppression for GNSS Array Antenna Receiver. Front. Phys. 2023, 10, 1095109. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, F.; Lu, Z.; Wang, F. Anti-Jamming Method and Implementation for GNSS Receiver Based on Array Antenna Rotation. Remote Sens. 2022, 14, 4774. [Google Scholar] [CrossRef]
- Brooks, D.H.; Nikias, C.L. The Cross-Bicepstrum: Definition, Properties, and Application for Simultaneous Reconstruction of Three Nonminimum Phase Signals. IEEE Trans. Signal Process. 1993, 41, 2389–2404. [Google Scholar] [CrossRef]
- Chong, Z.; He, H.; Haisong, J.; Qingliang, C.; Qing, G. Research on Anti-Jamming Algorithm and Performance of Array Antenna. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018. [Google Scholar]
- Li, W.; Mao, X.; Yu, W.; Yue, C. An Effective Technique for Enhancing Direction Finding Performance of Virtual Arrays. Int. J. Antennas Propag. 2014, 2014, 728463. [Google Scholar] [CrossRef]
- Manfredini, E.; Dovis, F.; Motella, B. Signal Quality Monitoring for Discrimination between Spoofing and Environmental Effects, Based on Multidimensional Ratio Metric Tests. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Gonen, E.; Mendel, J.M. Applications of Cumulants to Array Processing—Part III: Blind Beamforming for Coherent Signals. IEEE Trans. Signal Process. 1997, 45, 2252–2264. [Google Scholar] [CrossRef]
- Gonen, E.; Mendel, J.M.; Dogan, M.C. Applications of Cumulants to Array Processing—Part IV: Direction Finding in Coherent Signals Case. IEEE Trans. Signal Process. 1997, 45, 2265–2276. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| Hermitian transpose | |
| Transpose | |
| Norm of vector | |
| j | Imaginary unit |
| Parameter | Value |
|---|---|
| Light speed | m/s |
| Carrier frequency | 1575.42 MHz |
| Array element spacing | 1/2 wavelength |
| Interference power | −76 dBm |
| Number of elements | 1–8 |
| Range of azimuth angles | 0–180° |
| Parameter | Value |
|---|---|
| Satellite signal power | −130 dBm |
| Satellite signal angles in elevation | 45° |
| Satellite signal angles in azimuth | 120° |
| Array geometry | UCA |
| Number of interferences | 1–4 |
| Interference type | single-frequency interference |
| Azimuth of interference signal distribution | 0–360°, uniform distribution |
| Signal | Azimuth | Elevation |
|---|---|---|
| Interference 1 | 120° | 60° |
| Interference 2 | 180° | 50° |
| Interference 3 | 90° | 45° |
| Interference 4 | 0° | 60° |
| Number of Interference Signals | ||
|---|---|---|
| 2 | 67 dB | −42 dBm |
| 3 | 65 dB | −44 dBm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Fu, J.; Li, B.; Jiang, P. Distributed Sensitivity and Critical Interference Power Analysis of Multi-Degree-of-Freedom Navigation Interference for Global Navigation Satellite System Array Antennas. Sensors 2024, 24, 650. https://doi.org/10.3390/s24020650
Jiang Y, Fu J, Li B, Jiang P. Distributed Sensitivity and Critical Interference Power Analysis of Multi-Degree-of-Freedom Navigation Interference for Global Navigation Satellite System Array Antennas. Sensors. 2024; 24(2):650. https://doi.org/10.3390/s24020650
Chicago/Turabian StyleJiang, Yuchen, Jun Fu, Bao Li, and Pengfei Jiang. 2024. "Distributed Sensitivity and Critical Interference Power Analysis of Multi-Degree-of-Freedom Navigation Interference for Global Navigation Satellite System Array Antennas" Sensors 24, no. 2: 650. https://doi.org/10.3390/s24020650