
A Novel Ultrasonic Leak Detection System in Nuclear Power Plants Using Rigid Guide Tubes with FCOG and SNR


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background and Related Work
2.1. Leak-Before-Break
2.2. Acousto-Optic Leakage Monitoring
2.3. β-Ray Detection
2.4. Probabilistic Evaluations
3. Enhanced Acoustic Leak Detection System
3.1. Current Acoustic Leak Detection Technology
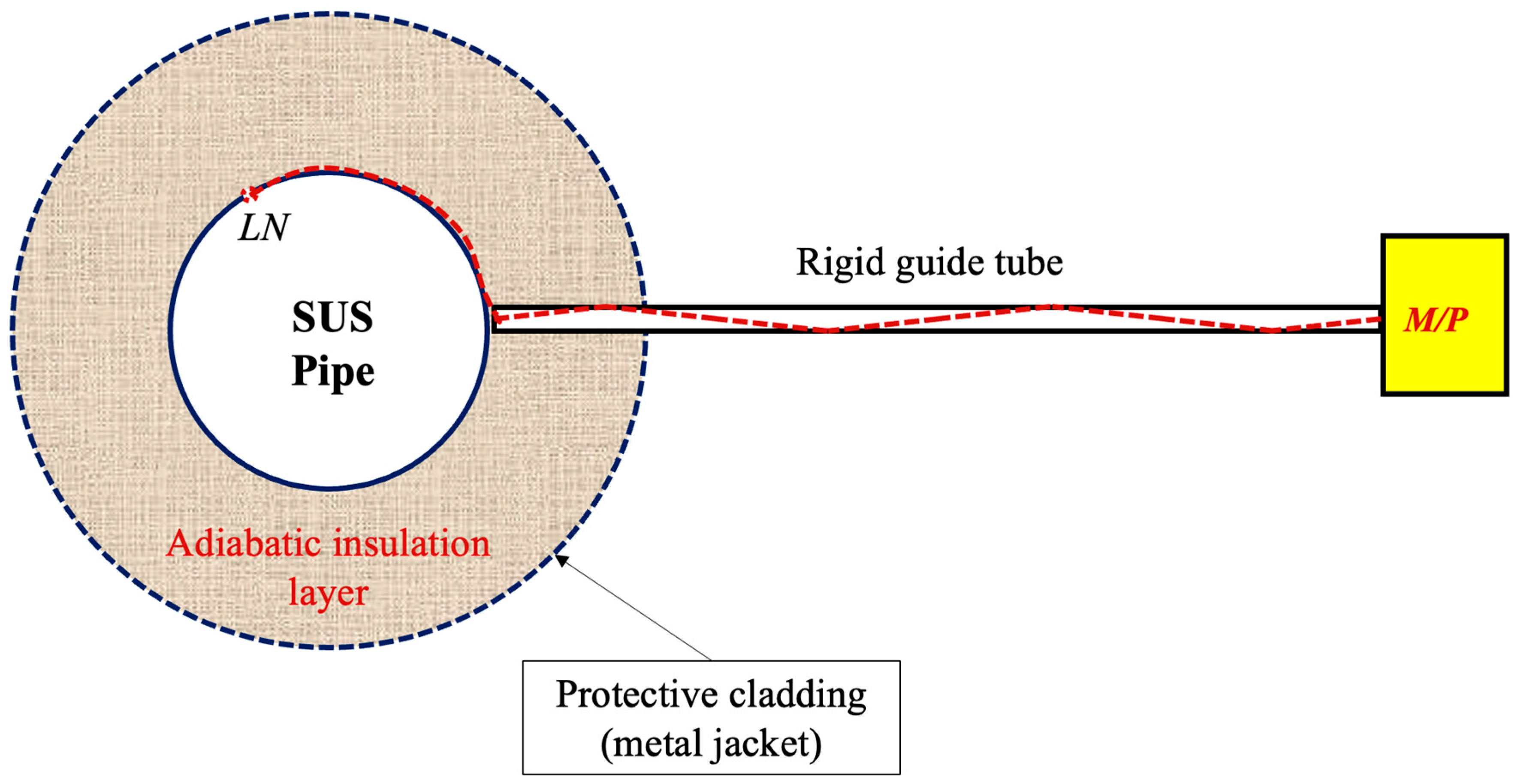
3.2. Acoustic Signal Forwarding with Rigid Guided Tubes
3.3. Enhanced FCOG for Leak Detection
- fi represents the frequency component I;
- A(fi) denotes the energy or spectral density at frequency component fi;
- N is the total number of frequency components.
3.4. Leak Detection Criteria
- Criterion 1: FCOG Shift
- FCOGLeak represents the FCOG for the detected leak signal;
- FCOGB/G represents the FCOG for the background noise signal;
- ∆f is the threshold frequency that defines the minimum deviation required to determine a leak event.
- Criterion 2: S/N Ratio in Random Frequencies
- represents the Signal-to-Noise Ratio at frequency fi;
- N is the total number of randomly selected frequencies;
- denotes the number of frequencies for which the S/N ratio exceeds 2.
4. Experiments and Results Analysis
4.1. Experimental Setup
4.2. Leak Point near ULD #2 (LN #2, 0.5 mm Leakage Nozzle, 200 kPa)
- Lower Frequency Band (25–46.6 kHz):
- Middle Frequency Band (46.8–67.4 kHz):
- Upper Frequency Band (67.6–88.8 kHz):
4.2.1. FCOG Shift Analysis (Leakage @ LN #2)
4.2.2. S/N Ratio Analysis (Leakage @ LN #2)
4.3. Leak Point near ULD #3 (LN #3, 1.0 mm Leakage Nozzle, 200 kPa)
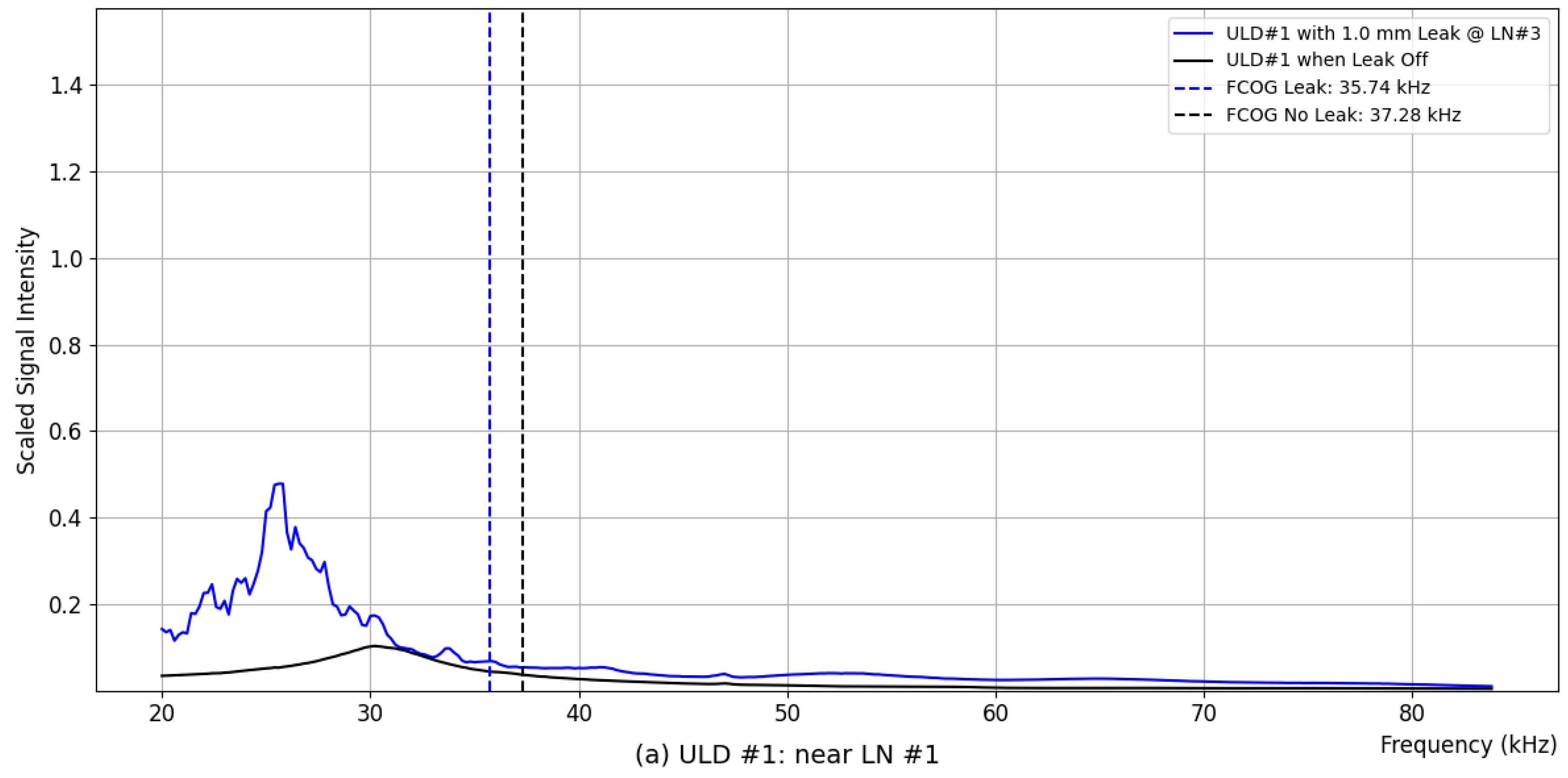
4.3.1. FCOG Shift Analysis (Leakage @ LN #3)
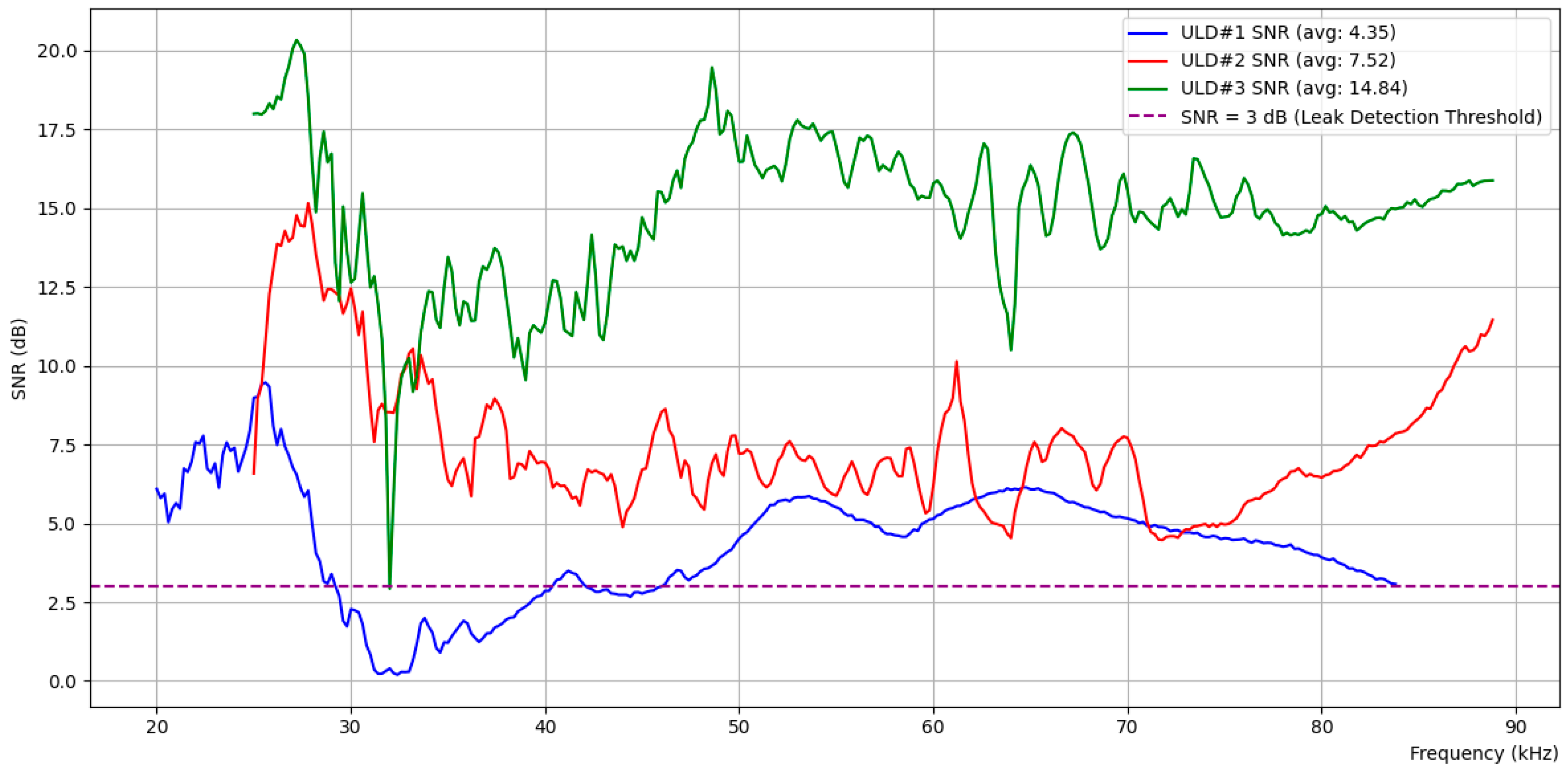
4.3.2. S/N Ratio Analysis (Leakage @ LN #3)
4.4. Future Directions in Parameter Optimization Using Machine Learning
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ballesteros, A.; Sanda, R.; Peinador, M.; Zerger, B.; Negri, P.; Wenke, R. Analysis of events related to cracks and leaks in the reactor coolant pressure boundary. Nucl. Eng. Des. 2014, 275, 163–167. [Google Scholar] [CrossRef]
- El-Sayed, M.; El Domiaty, A.; Mourad, A.-H.I.; Thekkuden, D.T. Leak before break fracture assessment of pressurized unplasticized PVC pipes with axial surface crack: Experimental and analytical analysis. Eng. Fract. Mech. 2022, 266, 108394. [Google Scholar] [CrossRef]
- Wilkowski, G. Leak-Before-Break: What Does It Really Mean? J. Press. Vessel Technol. 2000, 122, 267–272. [Google Scholar] [CrossRef]
- Clarion Energy Content Directors. An Historical Survey of Leak-Before-Break in Nuclear Plant Piping. Power Eng. 2010. Available online: https://www.power-eng.com/news/an-historical-survey-of-leak-before-break-in-nuclear-plant-piping/#gref (accessed on 2 July 2024).
- Niu, T.; Jiang, H.; Yan, J.; Liu, C.; Shi, W.; Xia, S.; Cai, Y.; Zhan, M.; Li, F.; Zhang, M. Acousto-Optic Leakage Monitoring System for Nuclear Power Plant Main Steam Pipeline. U.S. Patent Application No. 11,823,805, 21 November 2023. Available online: https://patents.justia.com/patent/11823805 (accessed on 2 July 2024).
- Tian, M.; Cong, T.; Ma, Z.; Chen, R.; Tian, W.; Qiu, S.; Su, G.H. A new unidentified leak detection method based on the EVR ventilation condensate. Prog. Nucl. Energy 2017, 98, 11–22. [Google Scholar] [CrossRef]
- Zheng, Y.; Hu, D.; Dai, Y. Simulation of the airborne radioactive substance distribution and monitoring of coolant leakage in a typical Nuclear Reactor Containment. Ann. Nucl. Energy 2016, 87, 462–470. [Google Scholar] [CrossRef]
- Jang, J.; Jeong, J.Y.; Park, J.; Cho, Y.-S.; Pak, K.; Kim, Y.K. Feasibility study of β-ray detection system for small leakage from reactor coolant system. Nucl. Eng. Technol. 2022, 54, 2748–2754. [Google Scholar] [CrossRef]
- Broek, D. Fracture of structures. In Elementary Engineering Fracture Mechanics; Broek, D., Ed.; Springer: Dordrecht, The Netherlands, 1982; pp. 377–407. ISBN 978-94-009-4333-9. [Google Scholar]
- Kobayashi, A.S.; Ziv, M.; Hall, L.R. Approximate stress intensity factor for an embedded elliptical crack near two parallel free surfaces. Int. J. Fract. Mech. 1965, 1, 81–95. [Google Scholar] [CrossRef]
- Jiang, Y.; Xia, H.; Wang, Z.; Zhang, J.; Yin, W. Research and Design of LBB System for Main Pipeline of Nuclear Power Plant. In Proceedings of the 2021 28th International Conference on Nuclear Engineering, Online, 4–6 August 2021. [Google Scholar]
- Zhang, J.; Chen, R.H.; Wang, M.J.; Tian, W.X.; Su, G.H.; Qiu, S.Z. Prediction of LBB leakage for various conditions by genetic neural network and genetic algorithms. Nucl. Eng. Des. 2017, 325, 33–43. [Google Scholar] [CrossRef]
- Wichman, K.; Lee, S. Development of USNRC standard review plan 3.6.3 for leak-before-break applications to nuclear power plants. Int. J. Press. Vessels Pip. 1990, 43, 57–65. [Google Scholar] [CrossRef]
- Waters, L.S.; McKinney, G.W.; Durkee, J.W.; Fensin, M.L.; Hendricks, J.S.; James, M.R.; Johns, R.C.; Pelowitz, D.B. The MCNPX Monte Carlo Radiation Transport Code. AIP Conf. Proc. 2007, 896, 81–90. [Google Scholar] [CrossRef]
- Sallaberry, C.J.; Kurth, R.; Kurth-Twombly, E.; Brust, F.W. Probabilistic Leak-Before-Break Evaluations of Pressurized-Water Reactor Piping Systems Using the Extremely Low Probability of Rupture Code; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2021. [Google Scholar]
- Program 41.01.04: Pressurized Water Reactor Materials Reliability Program (MRP)|Product Abstract. Available online: https://www.epri.com/research/programs/061145/results/3002023872 (accessed on 11 July 2024).
- Appendix A to Part 50—General Design Criteria for Nuclear Power Plants. Available online: https://www.nrc.gov/reading-rm/doc-collections/cfr/part050/part050-appa.html (accessed on 11 July 2024).
- Rondeau, A.; Lafargue, E.; Weilemann, A.; Cartier, F. Study of the health of an operating industrial valve by means of the continuously acoustic emission measurement. Proc. Meet. Acoust. 2019, 38, 055004. [Google Scholar] [CrossRef]
- FLÜS: Leak Detection System for Components and Compartment Humidity Monitoring. Available online: https://www.framatome.com/solutions-portfolio/portfolio/product/A0821/fl-s-leak-detection-system-for-components-and-compartment-humidity-monitoring (accessed on 25 September 2024).
- Fernlund, E. A Novel Pump-Controlled Asymmetric Cylinder with Electric Regeneration: Implementation and Evaluation of a Closed Hydraulic System on a Backhoe. In Proceedings of the 17th Scandinavian International Conference on Fluid Power, Online, 1–2 June 2021. [Google Scholar]
- Carlstedt, A. Modelling of Electromechanical Motors for Turret and Barrel Control in Main Battle Tanks. 2021. Available online: https://www.diva-portal.org/smash/get/diva2:1595624/FULLTEXT01.pdf (accessed on 2 July 2024).
- Gayan, S.; Senanayake, R.; Inaltekin, H.; Evans, J. Reliability Characterization for SIMO Communication Systems with Low-Resolution Phase Quantization Under Rayleigh Fading. IEEE Open J. Commun. Soc. 2021, 2, 2660–2679. [Google Scholar] [CrossRef]
- Amree, C.; Chaijit, S. Strain Hardening Analysis of SUS 304 Stainless Steel Cup for Multi Stage Deep Drawing Using Finite Element Simulation Comparison with Experiment Result. In Proceedings of the 2018 2nd International Conference on Engineering Innovation (ICEI), Bangkok, Thailand, 5–6 July 2018; pp. 35–41. [Google Scholar]
- Srisa-An, C. Guideline of Collinearity—Avoidable Regression Models on Time-series Analysis. In Proceedings of the 2021 2nd International Conference on Big Data Analytics and Practices (IBDAP), Bangkok, Thailand, 26–27 August 2021; pp. 28–32. [Google Scholar]
- Chohan, D.K.; Dobhal, D.C. A Comparison Based Study of Supervised Machine Learning Algorithms for Prediction of Heart Disease. In Proceedings of the 2022 International Conference on Computational Intelligence and Sustainable Engineering Solutions (CISES), Greater Noida, India, 20–21 May 2022; pp. 372–375. [Google Scholar]
- Alibrahim, H.; Ludwig, S.A. Hyperparameter Optimization: Comparing Genetic Algorithm against Grid Search and Bayesian Optimization. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC), Kraków, Poland, 28 June–1 July 2021; pp. 1551–1559. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, Y.-R.; Yeo, D.; Lee, J.-C.; Cho, J.-W.; Moon, S. A Novel Ultrasonic Leak Detection System in Nuclear Power Plants Using Rigid Guide Tubes with FCOG and SNR. Sensors 2024, 24, 6524. https://doi.org/10.3390/s24206524
Choi Y-R, Yeo D, Lee J-C, Cho J-W, Moon S. A Novel Ultrasonic Leak Detection System in Nuclear Power Plants Using Rigid Guide Tubes with FCOG and SNR. Sensors. 2024; 24(20):6524. https://doi.org/10.3390/s24206524
Chicago/Turabian StyleChoi, You-Rak, Doyeob Yeo, Jae-Cheol Lee, Jai-Wan Cho, and Sangook Moon. 2024. "A Novel Ultrasonic Leak Detection System in Nuclear Power Plants Using Rigid Guide Tubes with FCOG and SNR" Sensors 24, no. 20: 6524. https://doi.org/10.3390/s24206524