
An Overview of Software Sensor Applications in Biosystem Monitoring and Control




Abstract
:1. Introduction
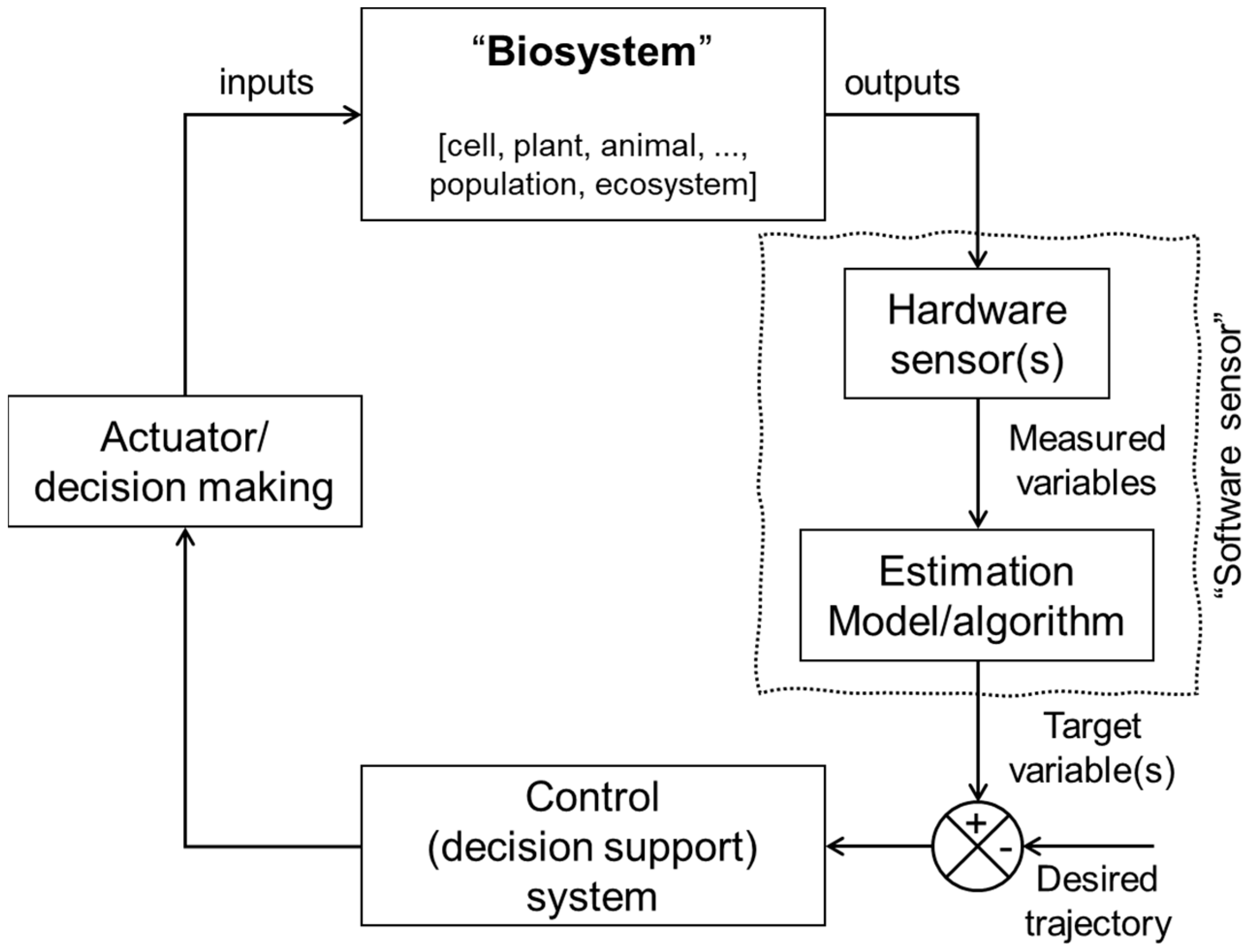
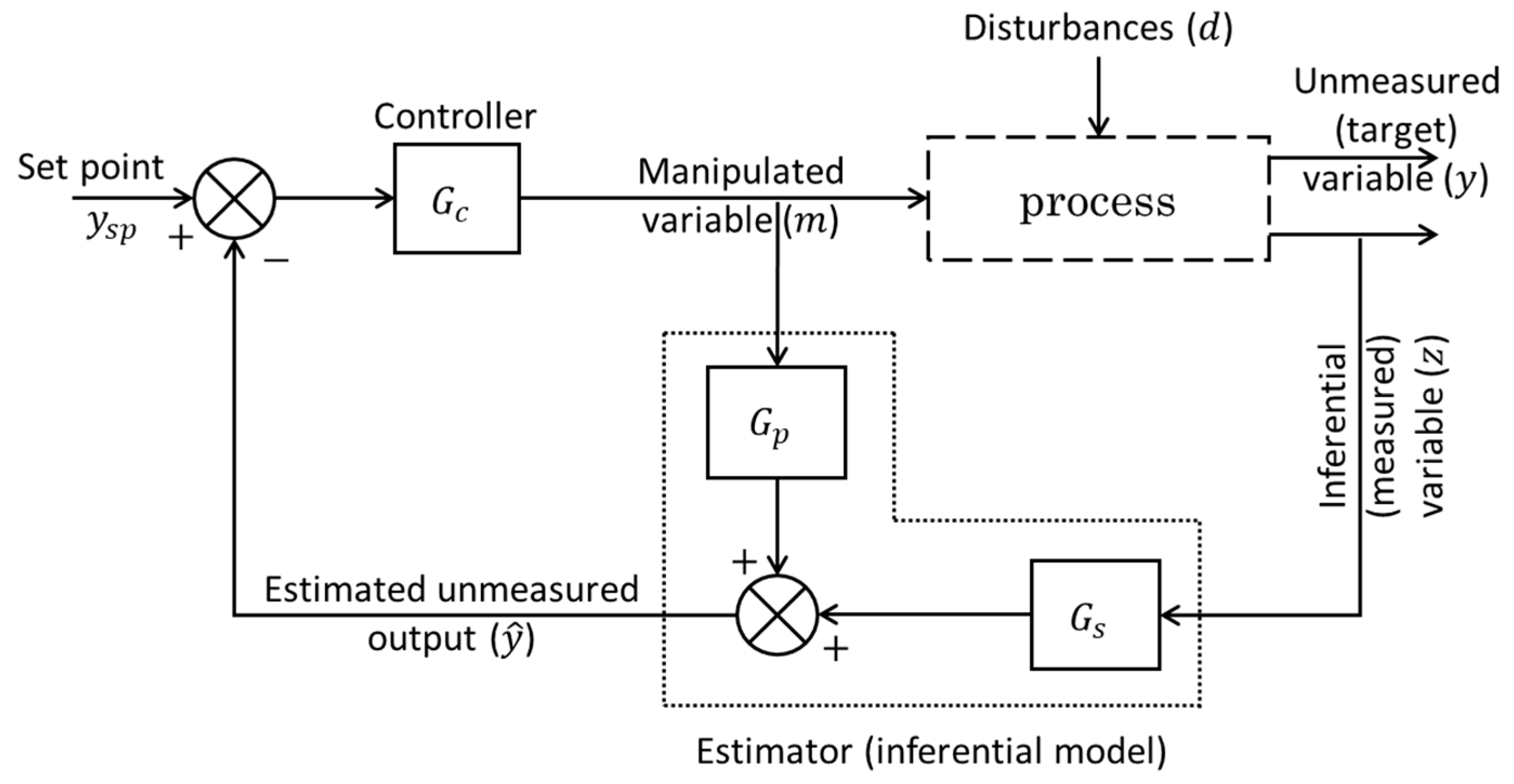
2. Model-Based Monitoring and Controlling of Biosystems Concepts
3. Software Sensors
3.1. The Emergence of Software Sensor
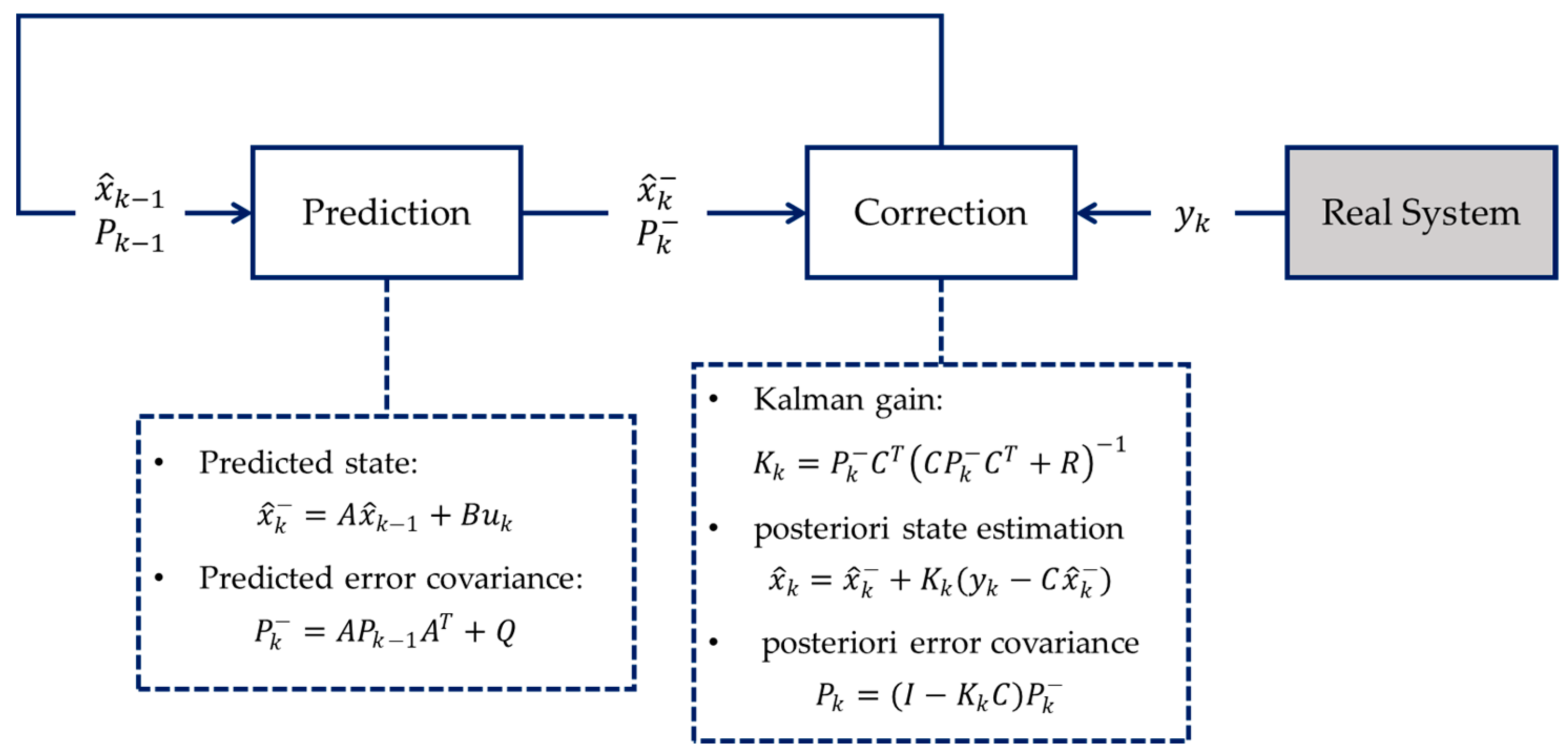
3.2. State Observers and Kalman Filters
- (1)
- Extended Kalman Filter (EKF) [38,39]: This is an extension of the Kalman filter to nonlinear systems. It linearizes the nonlinear system at each time step around the current mean and covariance estimate and then applies the standard Kalman filter equations. While widely used, the EKF has limitations, especially when dealing with highly nonlinear systems or when linearization errors are significant.
- (2)
- Unscented Kalman Filter (UKF) [40]: The UKF addresses some of the limitations of the EKF by approximating the mean and covariance through a set of carefully chosen sample points (called sigma points) rather than linearization. It captures the mean and covariance of the state distribution more accurately in nonlinear systems and is more robust to nonlinearity than the EKF.
- (3)
- (4)
- Particle Filter [43] is a non-parametric filter representing the state estimate as a set of weighted particles (similar to the ensemble members in EnKF). Unlike other Kalman filter variants, the particle filter does not rely on Gaussian assumptions, and therefore, it can deal with highly nonlinear and non-Gaussian systems. However, this flexibility comes at the cost of efficiency compared with EnKF.
3.3. Software Sensor Design
3.3.1. Modelling Approaches
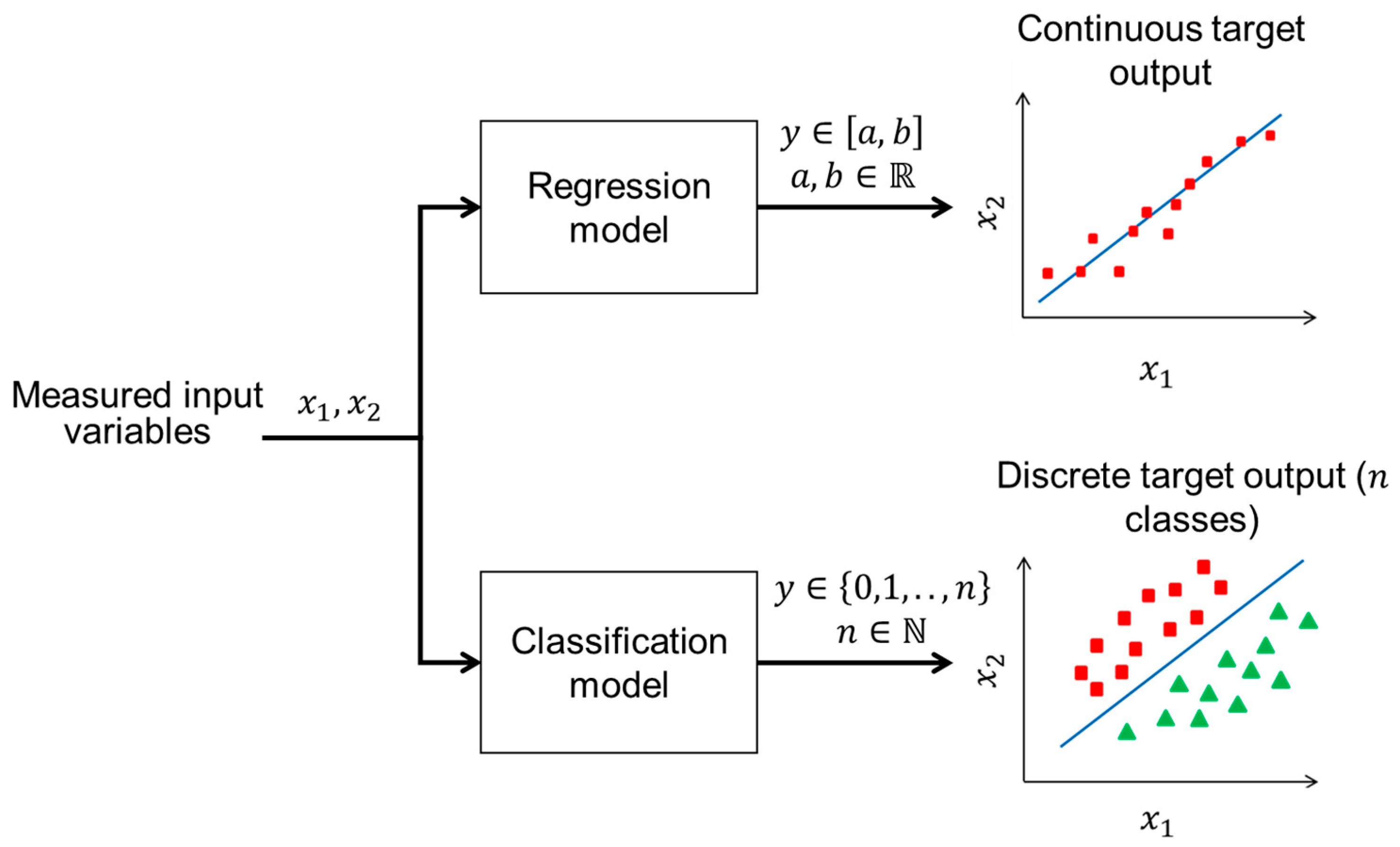
3.3.2. Data-Driven Software Sensors
4. Applications and Biosystem Case Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Example Applications | |
|---|---|---|
| Various applications | Manufacturing and industrial processes |
|
| Environmental engineering | ||
| Transportation and smart cities |
| |
| Cybersecurity |
| |
| Biosystems applications | Biology |
|
| Medical and human health |
| |
| Agriculture and animal health |
| |
|
4.1. Early Warning System: Software Sensor for Real-Time Monitoring off Animal Respiratory Infection
4.1.1. Model I: Feature Extraction and Coughing Sound Recognition
4.1.2. Model II: Detection of Infected Animals
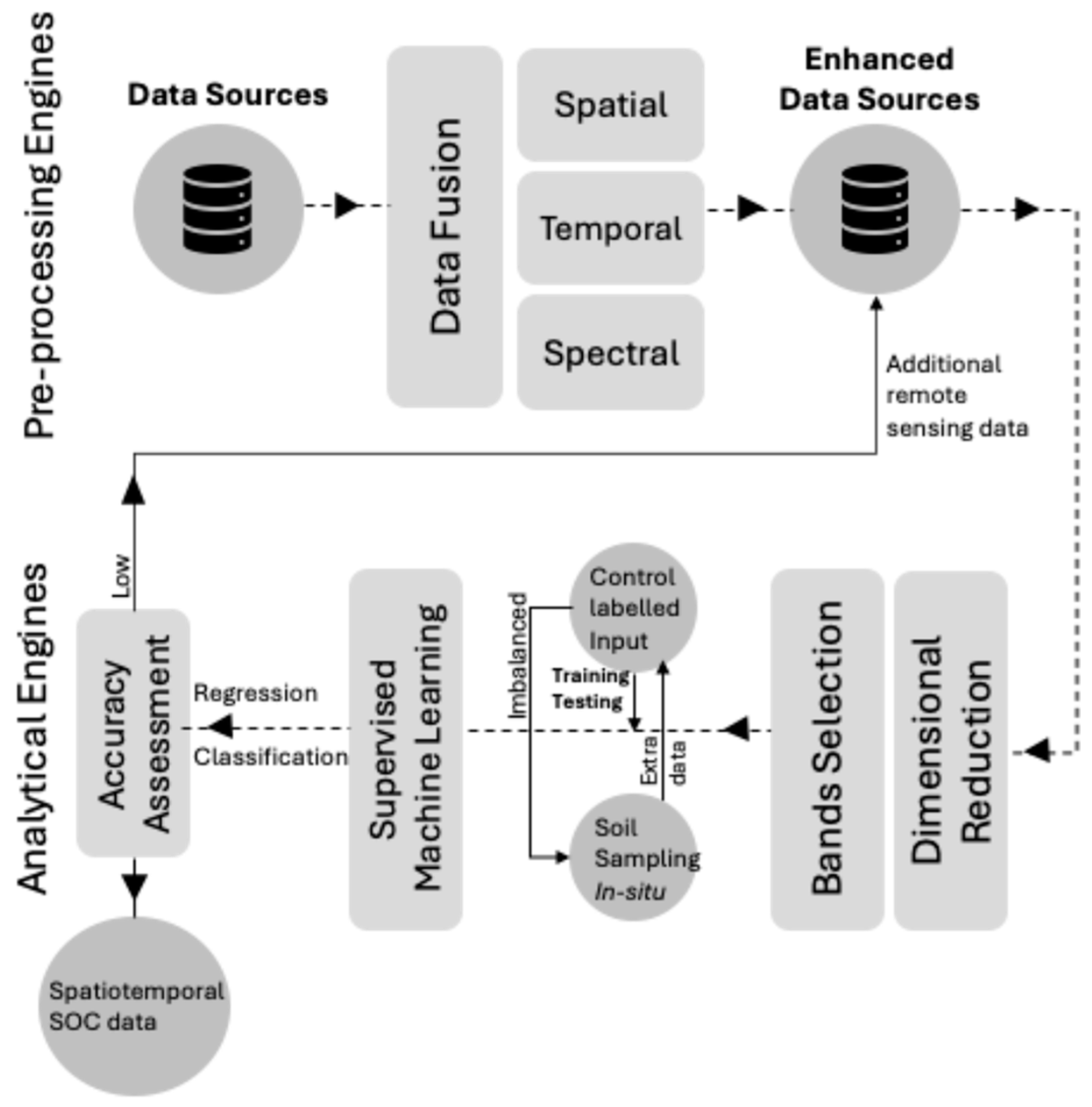
4.2. Sensor Fusion: Software Sensor Application for Indirect Estimation of Soil Organic Matter
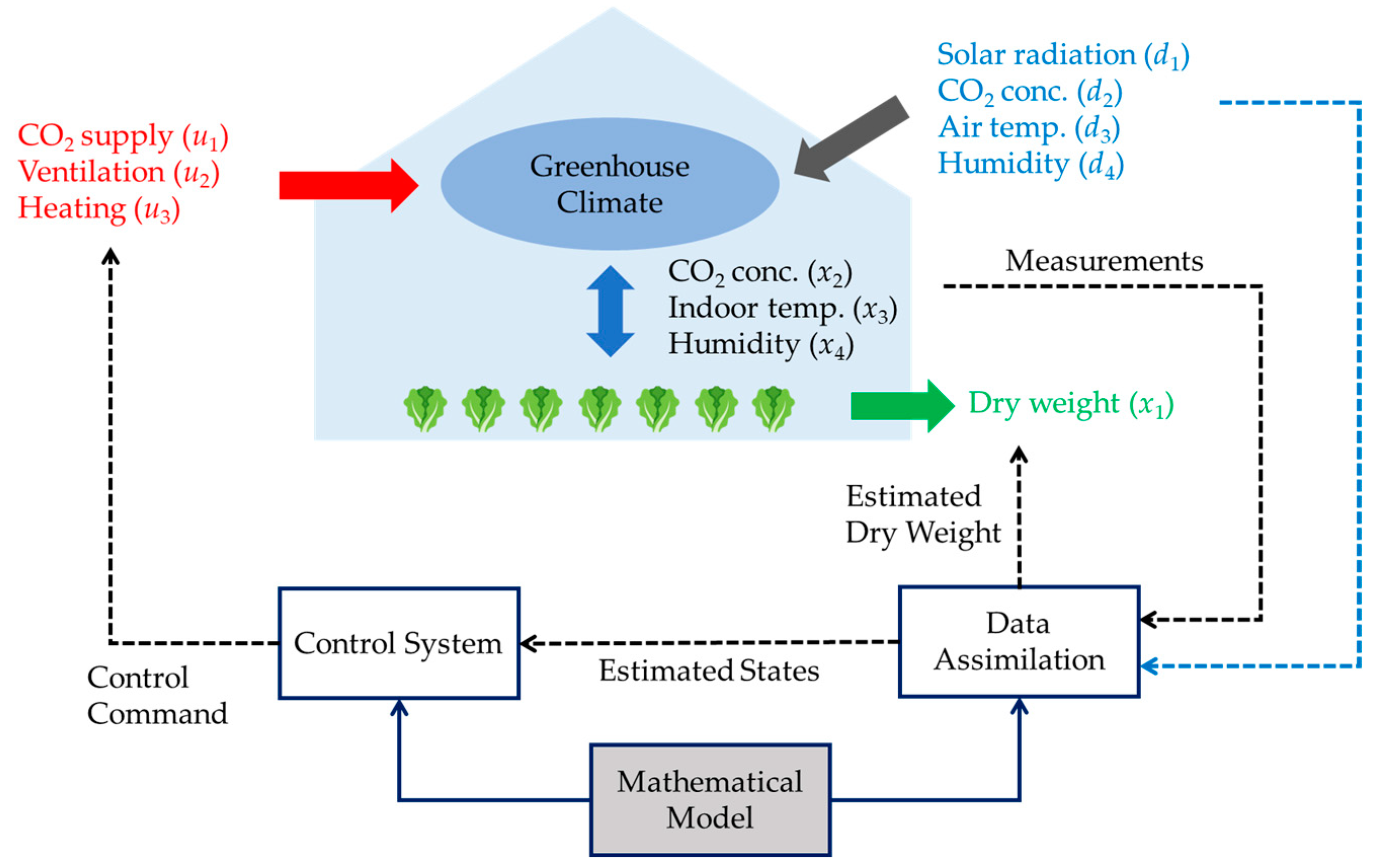
4.3. Biosystem Control: Software Sensor Application for Automated Greenhouse Control
5. Considerations for Designing Biosystem Software Sensors
5.1. Challenges Related to the Biological System
5.1.1. Complexity
5.1.2. Time Variability
5.1.3. Individual Variability
5.2. Challenges Related to the Modelling Step
5.2.1. Model Complexity
- -
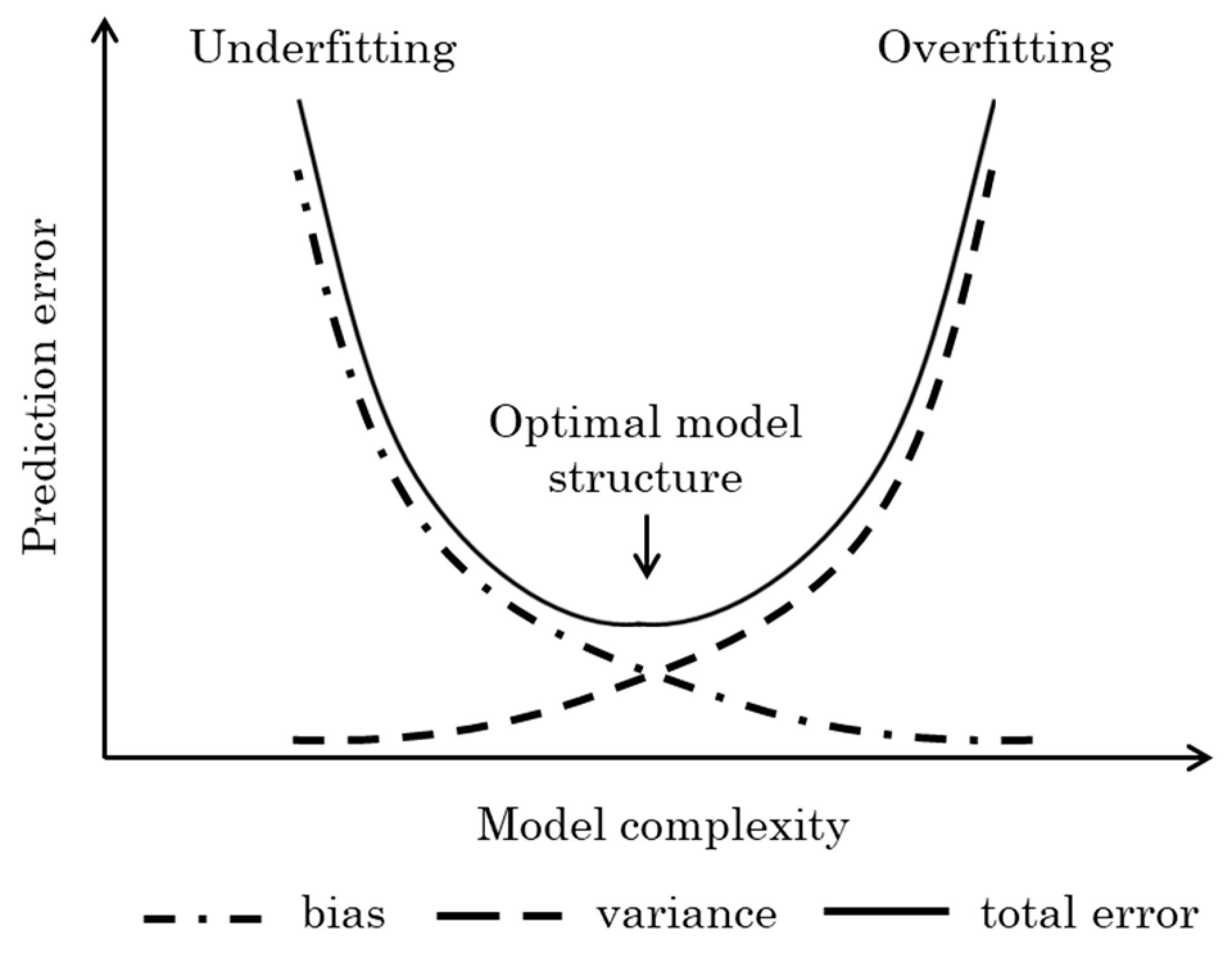
- Bias Error: This reflects the model’s ability to fit the training data. A model with high bias (indicative of low complexity and low accuracy) tends to miss relevant relationships between input features and the target output, leading to underfitting (Figure 10).
- -
- Variance Error: This indicates the model’s sensitivity to small fluctuations in the training data. A model with high variance (indicative of high complexity and low precision) captures the noise in the training data, making it less stable and resulting in overfitting. Such models perform well on training data but inadequately on unseen data due to their high complexity (Figure 10).
- -
- Noise: This represents the irreducible error inherent in any biological data, which cannot be eliminated during the design process.
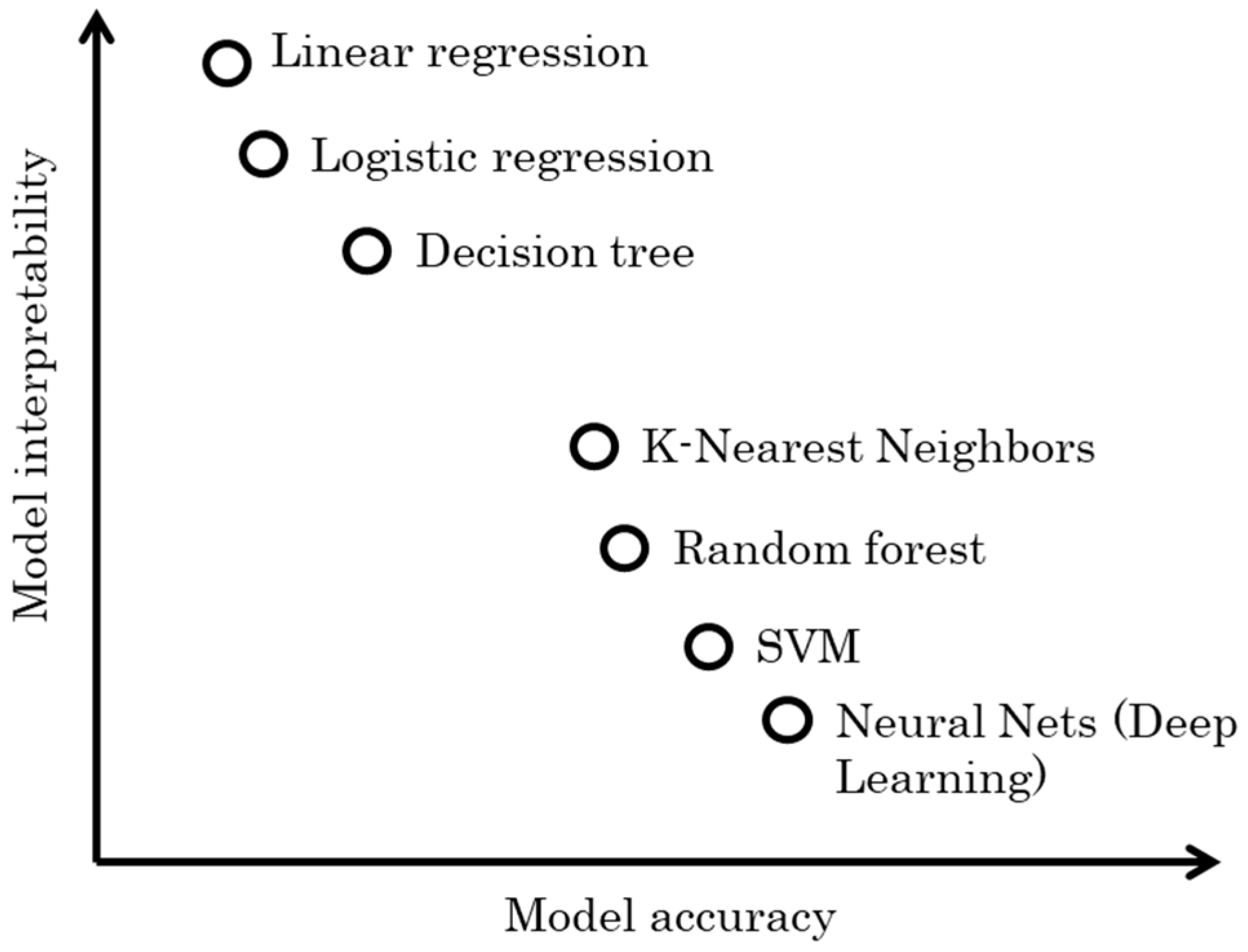
5.2.2. Model Interpretability
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Youssef, A. Model-Based Control of Micro-Environment with Real-Time Feedback of Bioresponses; KU Leuven: Leuven, Belgium, 2014. [Google Scholar]
- Ruth, M.; Hannon, B. Modeling Dynamic Biological Systems; Springer: New York, NY, USA, 1997; ISBN 978-1-4612-6856-7. [Google Scholar]
- Aerts, J.M. Modelling of Bio-Responses to Micro-Environmental Variables Using Dynamic Data-Based Models. Ph.D. Thesis, Katholieke Universiteit, Leuven, Belgium, 2001. [Google Scholar]
- Young, P.C. Data-Based Mechanistic and Topdown Modelling. In Proceedings of the International Environmental Modelling and Software Society Conference, Lugano, Switzerland, 24–27 June 2002; pp. 363–374. [Google Scholar]
- Mainka, T.; Mahler, N.; Herwig, C.; Pflügl, S. Soft Sensor-Based Monitoring and Efficient Control Strategies of Biomass Concentration for Continuous Cultures of Haloferax Mediterranei and Their Application to an Industrial Production Chain. Microorganisms 2019, 7, 648. [Google Scholar] [CrossRef] [PubMed]
- Paul, H.L. Energy Expenditure during Extravehicular Activity through Apollo. In Proceedings of the 42nd International Conference on Environmental Systems, San Diego, CA, USA, 15–19 July 2012. [Google Scholar] [CrossRef]
- Cai, Y.; Zheng, W.; Zhang, X.; Zhangzhong, L.; Xue, X. Research on Soil Moisture Prediction Model Based on Deep Learning. PLoS ONE 2019, 14, e0214508. [Google Scholar] [CrossRef] [PubMed]
- Moghadas, D.; Badorreck, A. Machine Learning to Estimate Soil Moisture from Geophysical Measurements of Electrical Conductivity. Near Surf. Geophys. 2019, 17, 181–195. [Google Scholar] [CrossRef]
- Al-Abbas, A.H.; Swain, P.H.; Baumgardner, M.F. Relating Organic Matter and Clay Content to the Multispectral Radiance of Soils. Soil Sci. 1972, 114, 477–485. [Google Scholar] [CrossRef]
- Mozaffari, H.; Moosavi, A.A.; Cornelis, W. Vis-NIR-Spectroscopy- and Loss-on-Ignition-Based Functions to Estimate Organic Matter Content of Calcareous Soils. Arch. Agron. Soil Sci. 2023, 69, 962–980. [Google Scholar] [CrossRef]
- Liu, C.; Zhai, Z.; Zhang, R.; Bai, J.; Zhang, M. Field Pest Monitoring and Forecasting System for Pest Control. Front. Plant Sci. 2022, 13, 990965. [Google Scholar] [CrossRef]
- Baulch, H.M.; Elliott, J.A.; Cordeiro, M.R.C.; Flaten, D.N.; Lobb, D.A.; Wilson, H.F. Soil and Water Management: Opportunities to Mitigate Nutrient Losses to Surface Waters in the Northern Great Plains. Environ. Rev. 2019, 27, 447–477. [Google Scholar] [CrossRef]
- Blasco, X.; Martínez, M.; Herrero, J.M.; Ramos, C.; Sanchis, J. Model-Based Predictive Control of Greenhouse Climate for Reducing Energy and Water Consumption. Comput. Electron. Agric. 2007, 55, 49–70. [Google Scholar] [CrossRef]
- Liu, C.; Chen, F.; Li, Z.; Cocq, K.L.; Liu, Y.; Wu, L. Impacts of Nitrogen Practices on Yield, Grain Quality, and Nitrogen-Use Efficiency of Crops and Soil Fertility in Three Paddy-Upland Cropping Systems. J. Sci. Food Agric. 2021, 101, 2218–2226. [Google Scholar] [CrossRef]
- Westermann, D.T.; Tindall, T.A.; James, D.W.; Hurst, R.L. Nitrogen and Potassium Fertilization of Potatoes: Yield and Specific Gravity. Am. Potato J. 1994, 71, 417–431. [Google Scholar] [CrossRef]
- Youssef, A. Soft Sensor and Biosensing. In Encyclopedia of Smart Agriculture Technologies; Springer: Cham, Switzerland, 2023; pp. 1–10. [Google Scholar] [CrossRef]
- Tham, M.T.; Montague, G.A.; Julian Morris, A.; Lant, P.A. Soft-Sensors for Process Estimation and Inferential Control. J. Process Control 1991, 1, 3–14. [Google Scholar] [CrossRef]
- Carstensen, J.; Harremoës, P.; Strube, R. Software Sensors Based on the Grey-Box Modelling Approach. Water Sci. Technol. 1996, 33, 117–126. [Google Scholar] [CrossRef]
- De Assis, A.J.; Maciel Filho, R. Soft Sensors Development for On-Line Bioreactor State Estimation. Comput. Chem. Eng. 2000, 24, 1099–1103. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Rab, S.; Pratap Singh, R.; Suman, R. Sensors for Daily Life: A Review. Sens. Int. 2021, 2, 100121. [Google Scholar] [CrossRef]
- Aparna, K.; Dayajanaki, D.H.; Devika Rani, P.; Devu, D.; Rajeev, S.P.; Baby Sreeja, S.D. Wearable Sensors in Daily Life: A Review. In Proceedings of the 2023 9th International Conference on Advanced Computing and Communication Systems, ICACCS, Coimbatore, India, 17–18 March 2023; pp. 863–868. [Google Scholar] [CrossRef]
- Parajuli, P.B.; Jayakody, P.; Sassenrath, G.F.; Ouyang, Y.; Pote, J.W. Assessing the Impacts of Crop-Rotation and Tillage on Crop Yields and Sediment Yield Using a Modeling Approach. Agric. Water Manag. 2013, 119, 32–42. [Google Scholar] [CrossRef]
- Ferencz, C.; Bognár, P.; Lichtenberger, J.; Hamar, D.; Tarcsai, G.; Timár, G.; Molnár, G.; Pásztor, S.Z.; Steinbach, P.; Székely, B.; et al. Crop Yield Estimation by Satellite Remote Sensing. Int. J. Remote Sens. 2004, 25, 4113–4149. [Google Scholar] [CrossRef]
- Al-Gaadi, K.A.; Hassaballa, A.A.; Tola, E.; Kayad, A.G.; Madugundu, R.; Alblewi, B.; Assiri, F. Prediction of Potato Crop Yield Using Precision Agriculture Techniques. PLoS ONE 2016, 11, e0162219. [Google Scholar] [CrossRef]
- Van Beylen, K.; Youssef, A.; Aerts, J.-M.; Lambrechts, T.; Papantoniou, I. Metabolite-Based Model Predictive Control of Cell Growth. In Proceedings of the Advancing Manufacture of Cell and Gene Therapies VI, Coronado, CA, USA, 27–31 January 2019. [Google Scholar]
- Aerts, J.-M.; Albert, B.D.; Matheus, V.E.J. Method and System for Controlling Bioresponse of Living Organisms. Patent Application No. 10/479,115, 18 August 2018. [Google Scholar]
- Berckmans, D. Basic Principles of PLF: Gold Standard, Labelling and Field Data. In Proceedings of the Precision Livestock Farming 2013, Leuven, Belgium, 10 September 2013; pp. 21–55. [Google Scholar]
- Tullo, E.; Fontana, I.; Diana, A.; Norton, T.; Berckmans, D.; Guarino, M. Application Note: Labelling, a Methodology to Develop Reliable Algorithm in PLF. Comput. Electron. Agric. 2017, 142, 424–428. [Google Scholar] [CrossRef]
- Jia, C.; Zhou, T.; Zhang, K.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Sang, X. Design and Experimentation of Soil Organic Matter Content Detection System Based on High-Temperature Excitation Principle. Comput. Electron. Agric. 2023, 214, 108325. [Google Scholar] [CrossRef]
- Mora, M.D.; Germani, A.; Manes, C. A State Observer for Nonlinear Dynamical Systems. Nonlinear Anal. Theory Methods Appl. 1997, 30, 4485–4496. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User; Prentice Hall: Upper Saddle River, NJ, USA, 1999; ISBN 978-0136566953. [Google Scholar]
- McAfee, M.; Kariminejad, M.; Weinert, A.; Huq, S.; Stigter, J.D.; Tormey, D. State Estimators in Soft Sensing and Sensor Fusion for Sustainable Manufacturing. Sustainability 2022, 14, 3635. [Google Scholar] [CrossRef]
- Joseph, B.; Brosilow, C.B. Inferential Control of Processes: Part I. Steady State Analysis and Design. AIChE J. 1978, 24, 485–492. [Google Scholar] [CrossRef]
- Luenberger, D.G. Observers for Multivariable Systems. IEEE Trans. Autom. Control 1966, 11, 190–197. [Google Scholar] [CrossRef]
- Van Dooren, P. Reduced Order Observers: A New Algorithm and Proof. Syst. Control Lett. 1984, 4, 243–251. [Google Scholar] [CrossRef]
- Solsona, J.; Valla, M.I.; Muravchik, C. A Nonlinear Reduced Order Observer for Permanent Magnet Synchronous Motors. In Proceedings of the IECON’94—20th Annual Conference of IEEE Industrial Electronics, Bologna, Italy, 5–9 September 1994; Volume 1, pp. 38–43. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Fluids Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Palatella, L.; Trevisan, A. Interaction of Lyapunov Vectors in the Formulation of the Nonlinear Extension of the Kalman Filter. Phys. Rev. E 2015, 91, 042905. [Google Scholar] [CrossRef]
- Ljung, L. Asymptotic Behavior of the Extended Kalman Filter as a Parameter Estimator for Linear Systems. IEEE Trans. Autom. Control 1979, 24, 36–50. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented Filtering and Nonlinear Estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Aanonsen, S.I.; Nœvdal, G.; Oliver, D.S.; Reynolds, A.C.; Vallès, B. The Ensemble Kalman Filter in Reservoir Engineering—A Review. SPE J. 2009, 14, 393–412. [Google Scholar] [CrossRef]
- Evensen, G. The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Young, P.C. Recursive Estimation and Time-Series Analysis: An Introduction for the Student and Practitioner; Springer: Berlin/Heidelberg, Germany, 2011; ISBN 3642219810. [Google Scholar]
- Voit, E.O. The Best Models of Metabolism. Wiley Interdiscip. Rev. Syst. Biol. Med. 2017, 9, e1391. [Google Scholar] [CrossRef] [PubMed]
- Fortuna, L.; Graziani, S.; Rizzo, A.; Xibilia Maria, G. Soft Sensors for Monitoring and Control of Industrial Processes; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 978-1-84628-479-3. [Google Scholar]
- Paulsson, D.; Gustavsson, R.; Mandenius, C.F. A Soft Sensor for Bioprocess Control Based on Sequential Filtering of Metabolic Heat Signals. Sensors 2014, 14, 17864–17882. [Google Scholar] [CrossRef] [PubMed]
- Kadlec, P.; Gabrys, B.; Strandt, S. Data-Driven Soft Sensors in the Process Industry. Comput. Chem. Eng. 2009, 33, 795–814. [Google Scholar] [CrossRef]
- Kadlec, P.; Grbić, R.; Gabrys, B. Review of Adaptation Mechanisms for Data-Driven Soft Sensors. Comput. Chem. Eng. 2011, 35, 1–24. [Google Scholar] [CrossRef]
- Van Beylen, K.; Youssef, A.; Fernández, A.P.; Lambrechts, T.; Papantoniou, I.; Aerts, J.M. Lactate-Based Model Predictive Control Strategy of Cell Growth for Cell Therapy Applications. Bioengineering 2020, 7, 78. [Google Scholar] [CrossRef]
- Peña Fernández, A.; Norton, T.; Youssef, A.; Exadaktylos, V.; Bahr, C.; Bruininx, E.; Vranken, E.; Berckmans, D. Real-Time Modelling of Individual Weight Response to Feed Supply for Fattening Pigs. Comput. Electron. Agric. 2019, 162, 895–906. [Google Scholar] [CrossRef]
- Youssef, A.; Colon, J.; Mantzios, K.; Gkiata, P.; Mayor, T.S.; Flouris, A.D.; De Bruyne, G.; Aerts, J.-M. Towards Model-Based Online Monitoring of Cyclist’s Head Thermal Comfort: Smart Helmet Concept and Prototype. Appl. Sci. 2019, 9, 3170. [Google Scholar] [CrossRef]
- Debeljak, M.; Džeroski, S. Decision Trees in Ecological Modelling. In Modelling Complex Ecological Dynamics: An Introduction into Ecological Modelling for Students, Teachers & Scientists; Springer: Berlin/Heidelberg, Germany, 2011; pp. 197–209. [Google Scholar] [CrossRef]
- Roozbeh, M.; Rouhi, A.; Mohamed, N.A.; Jahadi, F.; Arashi, M.; Roozbeh, M.; Rouhi, A.; Anisah Mohamed, N.; Jahadi, F. Generalized Support Vector Regression and Symmetry Functional Regression Approaches to Model the High-Dimensional Data. Symmetry 2023, 15, 1262. [Google Scholar] [CrossRef]
- La Rocca, M.; Perna, C. Designing Neural Networks for Modeling Biological Data: A Statistical Perspective. Math. Biosci. Eng. 2014, 11, 331–342. [Google Scholar] [CrossRef]
- Carpentier, L.; Berckmans, D.; Youssef, A.; Berckmans, D.; van Waterschoot, T.; Johnston, D.; Ferguson, N.; Earley, B.; Fontana, I.; Tullo, E.; et al. Automatic Cough Detection for Bovine Respiratory Disease in a Calf House. Biosyst. Eng. 2018, 173, 45–56. [Google Scholar] [CrossRef]
- Youssef, A.; Jansen, C.; Neethirajan, S.R. Soft-Sensing Approach for Predicting Bovine Respiratory Disease Severity. In Proceedings of the Precision Livestock Farming’22, Vienna, Austria, 29 August 2022; University of Veterinary Medicine Vienna: Vienna, Austria; pp. 932–939. [Google Scholar]
- Youssef, A.; Youssef Ali Amer, A.; Caballero, N.; Aerts, J.-M. Towards Online Personalized-Monitoring of Human Thermal Sensation Using Machine Learning Approach. Appl. Sci. 2019, 9, 3303. [Google Scholar] [CrossRef]
- Piccini, C.; Marchetti, A.; Rivieccio, R.; Napoli, R. Multinomial Logistic Regression with Soil Diagnostic Features and Land Surface Parameters for Soil Mapping of Latium (Central Italy). Geoderma 2019, 352, 385–394. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.; Chen, L.; Zhang, Y.; Wang, C. Application and Analysis of Support Vector Machine Based Simulation for Runoff and Sediment Yield. Biosyst. Eng. 2016, 142, 145–155. [Google Scholar] [CrossRef]
- Kong, Y.; Yu, T. A Deep Neural Network Model Using Random Forest to Extract Feature Representation for Gene Expression Data Classification. Sci. Rep. 2018, 8, 16477. [Google Scholar] [CrossRef]
- Tadeusiewicz, R. Neural Networks as a Tool for Modeling of Biological Systems. Bio-Algorithms Med-Syst. 2015, 11, 135–144. [Google Scholar] [CrossRef]
- Fang, K.; Kifer, D.; Lawson, K.; Shen, C. Evaluating the Potential and Challenges of an Uncertainty Quantification Method for Long Short-Term Memory Models for Soil Moisture Predictions. Water Resour. Res. 2020, 56, e2020WR028095. [Google Scholar] [CrossRef]
- Youssef, A.; Berckmans, D.; Norton, T. Non-Invasive PPG-Based System for Continuous Heart Rate Monitoring of Incubated Avian Embryo. Sensors 2020, 20, 4560. [Google Scholar] [CrossRef] [PubMed]
- Youssef, A.; Peña Fernández, A.; Wassermann, L.; Biernot, S.; Wittauer, E.-M.; Bleich, A.; Hartung, J.; Berckmans, D.; Norton, T. An Approach towards Motion-Tolerant PPG-Based Algorithm for Real-Time Heart Rate Monitoring of Moving Pigs. Sensors 2020, 20, 4251. [Google Scholar] [CrossRef]
- Youssef, A.; Exadaktylos, V.; Berckmans, D.A.D.A. Towards Real-Time Control of Chicken Activity in a Ventilated Chamber. Biosyst. Eng. 2015, 135, 31–43. [Google Scholar] [CrossRef]
- Peña Fernández, A.; Demmers, T.G.M.; Tong, Q.; Youssef, A.; Norton, T.; Vranken, E.; Berckmans, D. Real-Time Modelling of Indoor Particulate Matter Concentration in Poultry Houses Using Broiler Activity and Ventilation Rate. Biosyst. Eng. 2019, 187, 214–225. [Google Scholar] [CrossRef]
- Peña Fernández, A.; Tullo, E.; van Hertem, T.; Youssef, A.; Exadaktylos, V.; Vranken, E.; Guarino, M. Real-Time Monitoring of Broiler Flock’s Welfare Status Using Camera-Based Technology. Biosyst. Eng. 2018, 173, 103–114. [Google Scholar] [CrossRef]
- Ferrari, S.; Silva, M.; Guarino, M.; Aerts, J.M.; Berckmans, D. Cough Sound Analysis to Identify Respiratory Infection in Pigs. Comput. Electron. Agric. 2008, 64, 318–325. [Google Scholar] [CrossRef]
- Chung, Y.; Oh, S.; Lee, J.; Park, D.; Chang, H.H.; Kim, S. Automatic Detection and Recognition of Pig Wasting Diseases Using Sound Data in Audio Surveillance Systems. Sensors 2013, 13, 12929–12942. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Tu, D.; Shen, W.; Bao, J. Recognition of Sick Pig Cough Sounds Based on Convolutional Neural Network in Field Situations. Inf. Process. Agric. 2021, 8, 369–379. [Google Scholar] [CrossRef]
- Hassani, F.A. Bioreceptor-Inspired Soft Sensor Arrays: Recent Progress towards Advancing Digital Healthcare. Soft Sci. 2023, 3, 1–33. [Google Scholar] [CrossRef]
- Gao, S.; Qiu, S.; Ma, Z.; Tian, R.; Liu, Y. SVAE-WGAN-Based Soft Sensor Data Supplement Method for Process Industry. IEEE Sens. J. 2022, 22, 601–610. [Google Scholar] [CrossRef]
- Choi, D.J.; Park, H. A Hybrid Artificial Neural Network as a Software Sensor for Optimal Control of a Wastewater Treatment Process. Water Res. 2001, 35, 3959–3967. [Google Scholar] [CrossRef]
- Paepae, T.; Bokoro, P.N.; Kyamakya, K. Data Augmentation for a Virtual-Sensor-Based Nitrogen and Phosphorus Monitoring. Sensors 2023, 23, 1061. [Google Scholar] [CrossRef]
- Schneider, M.Y.; Furrer, V.; Sprenger, E.; Carbajal, J.P.; Villez, K.; Maurer, M. Benchmarking Soft Sensors for Remote Monitoring of On-Site Wastewater Treatment Plants. Environ. Sci. Technol. 2020, 54, 10840–10849. [Google Scholar] [CrossRef]
- Maniscalco, U.; Pilato, G.; Vella, F. Soft Sensor Network for Environmental Monitoring. Smart Innov. Syst. Technol. 2016, 55, 705–714. [Google Scholar] [CrossRef]
- Murugan, C.; Natarajan, P. Estimation of Fungal Biomass Using Multiphase Artificial Neural Network Based Dynamic Soft Sensor. J. Microbiol. Methods 2019, 159, 5–11. [Google Scholar] [CrossRef] [PubMed]
- Kaptan, C.; Kantarci, B.; Soyata, T.; Boukerche, A. Emulating Smart City Sensors Using Soft Sensing and Machine Intelligence: A Case Study in Public Transportation. In Proceedings of the IEEE International Conference on Communications, Kansas City, MO, USA, 20–24 May 2018. [Google Scholar] [CrossRef]
- Hu, Z.; Yang, R.; Fang, L.; Wang, Z.; Zhao, Y. Research on Vehicle Speed Prediction Model Based on Traffic Flow Information Fusion. Energy 2024, 292, 130416. [Google Scholar] [CrossRef]
- Juma, M.; Shaalan, K. Cyberphysical Systems in the Smart City: Challenges and Future Trends for Strategic Research. In Swarm Intelligence for Resource Management in Internet of Things; Academic Press: Cambridge, MA, USA, 2020; pp. 65–85. [Google Scholar] [CrossRef]
- Barodi, A.; Zemmouri, A.; Bajit, A.; Benbrahim, M.; Tamtaoui, A. Intelligent Transportation System Based on Smart Soft-Sensors to Analyze Road Traffic and Assist Driver Behavior Applicable to Smart Cities. Microprocess. Microsyst. 2023, 100, 104830. [Google Scholar] [CrossRef]
- Pech, M.; Vrchota, J.; Bednář, J. Predictive Maintenance and Intelligent Sensors in Smart Factory: Review. Sensors 2021, 21, 1470. [Google Scholar] [CrossRef]
- Ruiz-Arenas, S.; Horváth, I.; Mejía-Gutiérrez, R.; Opiyo, E.Z. Towards the Maintenance Principles of Cyber-Physical Systems. Stroj. Vestn. J. Mech. Eng. 2014, 60, 815–831. [Google Scholar] [CrossRef]
- Papa, G.; Zurutuza, U.; Uribeetxeberria, R. Cyber Physical System Based Proactive Collaborative Maintenance. In Proceedings of the 2016 International Conference on Smart Systems and Technologies, SST, Osijek, Croatia, 12–14 October 2016; pp. 173–178. [Google Scholar] [CrossRef]
- Alassery, F. Predictive Maintenance for Cyber Physical Systems Using Neural Network Based on Deep Soft Sensor and Industrial Internet of Things. Comput. Electr. Eng. 2022, 101, 108062. [Google Scholar] [CrossRef]
- Shcherbakov, M.V.; Glotov, A.V.; Cheremisinov, S.V. Proactive and Predictive Maintenance of Cyber-Physical Systems. Stud. Syst. Decis. Control 2020, 259, 263–278. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, S.; Guo, S.; Zhu, J. Multi-Sensor Data Fusion for Cyber Security Situation Awareness. Procedia Environ. Sci. 2011, 10, 1029–1034. [Google Scholar] [CrossRef]
- Martínez-Monge, I.; Martínez, C.; Decker, M.; Udugama, I.A.; Marín de Mas, I.; Gernaey, K.V.; Nielsen, L.K. Soft-Sensors Application for Automated Feeding Control in High-Throughput Mammalian Cell Cultures. Biotechnol. Bioeng. 2022, 119, 1077–1090. [Google Scholar] [CrossRef]
- Kim, J.; Park, S.; Lee, H.; Choi, Y.; Jung, S.; Kim, D.H. Flexible and Stretchable Electronics for Healthcare Monitoring. Adv. Mater. 2023, 35, 2211147. [Google Scholar] [CrossRef]
- Kroll, P.; Stelzer, I.V.; Herwig, C. Soft Sensor for Monitoring Biomass Subpopulations in Mammalian Cell Culture Processes. Biotechnol. Lett. 2017, 39, 1667–1673. [Google Scholar] [CrossRef] [PubMed]
- Yan, A.; Shao, H.; Wang, P. A Soft-Sensing Method of Dissolved Oxygen Concentration by Group Genetic Case-Based Reasoning with Integrating Group Decision Making. Neurocomputing 2015, 169, 422–429. [Google Scholar] [CrossRef]
- Sagmeister, P.; Kment, M.; Wechselberger, P.; Meitz, A.; Langemann, T.; Herwig, C. Soft-Sensor Assisted Dynamic Investigation of Mixed Feed Bioprocesses. Process Biochem. 2013, 48, 1839–1847. [Google Scholar] [CrossRef]
- Sang, H.; Wang, F.; He, D.; Chang, Y.; Zhang, D. On-Line Estimation of Biomass Concentration and Specific Growth Rate in the Fermentation Process. In Proceedings of the World Congress on Intelligent Control and Automation (WCICA), Dalian, China, 21–23 June 2006; Volume 1, pp. 4644–4648. [Google Scholar] [CrossRef]
- Bhattacharya, P.; Tanwar, S.; Bodkhe, U.; Tyagi, S.; Kumar, N. BinDaaS: Blockchain-Based Deep-Learning as-a-Service in Healthcare 4.0 Applications. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1242–1255. [Google Scholar] [CrossRef]
- Mbunge, E.; Muchemwa, B.; Jiyane, S.; Batani, J. Sensors and Healthcare 5.0: Transformative Shift in Virtual Care through Emerging Digital Health Technologies. Glob. Health J. 2021, 5, 169–177. [Google Scholar] [CrossRef]
- Hatamie, A.; Angizi, S.; Kumar, S.; Pandey, C.M.; Simchi, A.; Willander, M.; Malhotra, B.D. Review—Textile Based Chemical and Physical Sensors for Healthcare Monitoring. J. Electrochem. Soc. 2020, 167, 037546. [Google Scholar] [CrossRef]
- Smith, J.; Brown, P.; Garcia, L.; Nguyen, T. Advances in Machine Learning Algorithms for Environmental Sensing Applications. Sensors 2023, 23, 8944. [Google Scholar] [CrossRef]
- Aydin, E.B.; Aydin, M.; Sezginturk, M.K. Biosensors in Drug Discovery and Drug Analysis. Curr. Anal. Chem. 2018, 15, 467–484. [Google Scholar] [CrossRef]
- Beke, Á.K.; Gyürkés, M.; Nagy, Z.K.; Marosi, G.; Farkas, A. Digital Twin of Low Dosage Continuous Powder Blending—Artificial Neural Networks and Residence Time Distribution Models. Eur. J. Pharm. Biopharm. 2021, 169, 64–77. [Google Scholar] [CrossRef]
- Jayaraman, P.P.; Yavari, A.; Georgakopoulos, D.; Morshed, A.; Zaslavsky, A. Internet of Things Platform for Smart Farming: Experiences and Lessons Learnt. Sensors 2016, 16, 1884. [Google Scholar] [CrossRef] [PubMed]
- García-Mañas, F.; Rodríguez, F.; Berenguel, M. Leaf Area Index Soft Sensor for Tomato Crops in Greenhouses. IFAC-Pap. 2020, 53, 15796–15803. [Google Scholar] [CrossRef]
- Vaz, C.M.P.; Jones, S.; Meding, M.; Tuller, M. Evaluation of Standard Calibration Functions for Eight Electromagnetic Soil Moisture Sensors. Vadose Zone J. 2013, 12, 1–16. [Google Scholar] [CrossRef]
- Cui, H.; Jiang, L.; Paloscia, S.; Santi, E.; Pettinato, S.; Wang, J.; Fang, X.; Liao, W. The Potential of ALOS-2 and Sentinel-1 Radar Data for Soil Moisture Retrieval With High Spatial Resolution Over Agroforestry Areas, China. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–17. [Google Scholar] [CrossRef]
- Shi, P.; Luan, X.; Liu, F.; Karimi, H.R. Kalman Filtering on Greenhouse Climate Control. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 779–784. [Google Scholar]
- Van Henten, E.J. Greenhouse Climate Management: An Optimal Control Approach; Wageningen University and Research: Wageningen, The Netherlands, 1994; ISBN 9798728200710. [Google Scholar]
- Youssef, A.; Viazzi, S.; Exadaktylos, V.; Berckmans, D. Non-Contact, Motion-Tolerant Measurements of Chicken (Gallus Gallus) Embryo Heart Rate (HR) Using Video Imaging and Signal Processing. Biosyst. Eng. 2014, 125, 9–16. [Google Scholar] [CrossRef]
- Lu, M.; Norton, T.; Youssef, A.; Radojkovic, N.; Fernández, A.P.; Berckmans, D. Extracting Body Surface Dimensions from Top-View Images of Pigs. Int. J. Agric. Biol. Eng. 2018, 11, 182–191. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, L.; Li, X.; Liu, Y.; Wang, Y. Development of a Multi-Parameter Wireless Sensing System for Smart Agriculture Applications. Sensors 2022, 22, 4319. [Google Scholar] [CrossRef]
- Wang, M.; Youssef, A.; Larsen, M.; Rault, J.-L.; Berckmans, D.; Marchant-Forde, J.N.; Hartung, J.; Bleich, A.; Lu, M.; Norton, T. Contactless Video-Based Heart Rate Monitoring of a Resting and an Anesthetized Pig. Animals 2021, 11, 442. [Google Scholar] [CrossRef]
- Exadaktylos, V.; Silva, M.; Aerts, J.-M.; Taylor, C.J.; Berckmans, D. Real-Time Recognition of Sick Pig Cough Sounds. Comput. Electron. Agric. 2008, 63, 207–214. [Google Scholar] [CrossRef]
- Smith, A.; Johnson, B.; Miller, C. Effects of Precision Feeding on Growth Performance and Nutrient Utilization in Swine. J. Anim. Sci. 2021, 99, skab038. [Google Scholar] [CrossRef]
- Manteuffel, G.; Puppe, B.; Schön, P.C. Vocalization of Farm Animals as a Measure of Welfare. Appl. Anim. Behav. Sci. 2004, 88, 163–182. [Google Scholar] [CrossRef]
- Youssef, A.; Caballero, N.; Aerts, J.M. Model-Based Monitoring of Occupant’s Thermal State for Adaptive HVAC Predictive Controlling. Processes 2019, 7, 720. [Google Scholar] [CrossRef]
- Youssef, A.; Truyen, P.; Brode, P.; Fiala, D.; Aerts, J.-M. Towards Real-Time Model-Based Monitoring and Adoptive Controlling of Indoor Thermal Comfort. In Proceedings of the Ventilating Healthy Low-Energy Buildings, Nottingham, UK, 13–14 September 2017; Curran Associates, Inc.: Nottingham, UK, 2017. [Google Scholar]
- Cho, Y.H.; Kim, M.; Yoon, S.; Lee, K.; Kim, J. Development of an Automatic Irrigation System Using Wireless Sensor Network and GPRS Module. Korean J. Agric. For. Meteorol. 2016, 18, 168–176. [Google Scholar] [CrossRef]
- Handa, D.; Peschel, J.M. A Review of Monitoring Techniques for Livestock Respiration and Sounds. Front. Anim. Sci. 2022, 3, 904834. [Google Scholar] [CrossRef]
- Stewart, M.; Wilson, M.T.; Schaefer, A.L.; Huddart, F.; Sutherland, M.A. The Use of Infrared Thermography and Accelerometers for Remote Monitoring of Dairy Cow Health and Welfare. J. Dairy Sci. 2017, 100, 3893–3901. [Google Scholar] [CrossRef]
- White, B.J.; Renter, D.G. Bayesian Estimation of the Performance of Using Clinical Observations and Harvest Lung Lesions for Diagnosing Bovine Respiratory Disease in Post-Weaned Beef Calves. J. Vet. Diagn. Investig. 2009, 21, 446–453. [Google Scholar] [CrossRef]
- Yin, Y.; Ji, N.; Wang, X.; Shen, W.; Dai, B.; Kou, S.; Liang, C. An Investigation of Fusion Strategies for Boosting Pig Cough Sound Recognition. Comput. Electron. Agric. 2023, 205, 107645. [Google Scholar] [CrossRef]
- Shen, W.; Ji, N.; Yin, Y.; Dai, B.; Tu, D.; Sun, B.; Hou, H.; Kou, S.; Zhao, Y. Fusion of Acoustic and Deep Features for Pig Cough Sound Recognition. Comput. Electron. Agric. 2022, 197, 106994. [Google Scholar] [CrossRef]
- Guarino, M.; Jans, P.; Costa, A.; Aerts, J.M.; Berckmans, D. Field Test of Algorithm for Automatic Cough Detection in Pig Houses. Comput. Electron. Agric. 2008, 62, 22–28. [Google Scholar] [CrossRef]
- Wang, X.; Yin, Y.; Dai, X.; Shen, W.; Kou, S.; Dai, B. Automatic Detection of Continuous Pig Cough in a Complex Piggery Environment. Biosyst. Eng. 2024, 238, 78–88. [Google Scholar] [CrossRef]
- Cuan, K.; Zhang, T.; Li, Z.; Huang, J.; Ding, Y.; Fang, C. Automatic Newcastle Disease Detection Using Sound Technology and Deep Learning Method. Comput. Electron. Agric. 2022, 194, 106740. [Google Scholar] [CrossRef]
- Vandermeulen, J.; Bahr, C.; Johnston, D.; Earley, B.; Tullo, E.; Fontana, I.; Guarino, M.; Exadaktylos, V.; Berckmans, D. Early Recognition of Bovine Respiratory Disease in Calves Using Automated Continuous Monitoring of Cough Sounds. Comput. Electron. Agric. 2016, 129, 15–26. [Google Scholar] [CrossRef]
- Aerts, J.M.; Jans, P.; Halloy, D.; Gustin, P.; Berckmans, D. Labeling of Cough Data from Pigs for On-Line Disease Monitoring by Sound Analysis. Trans. ASAE 2005, 48, 351–354. [Google Scholar] [CrossRef]
- Exadaktylos, V.; Silva, M.; Berckmans, D. Automatic Identification and Interpretation of Animal Sounds, Application to Livestock Production Optimisation. In Soundscape Semiotics—Localization and Categorization; IntechOpen: London, UK, 2014. [Google Scholar]
- Aarts, Y.J.M. The EnergyTag: A Wearable Software Sensor for Online Monitoring of Animal’s Dynamic Energy Expenditure. In Proceedings of the 11th European Conference on Precision Livestock Farming, Bologna, Italy, 9–12 September 2024; Berckmans, D., Tassinari, P., Torreggiani, D., Eds.; EA-PLF: Bologna, Italy, 2024; pp. 1307–1315. [Google Scholar]
- Lagua, E.B.; Mun, H.S.; Ampode, K.M.B.; Chem, V.; Kim, Y.H.; Yang, C.J. Artificial Intelligence for Automatic Monitoring of Respiratory Health Conditions in Smart Swine Farming. Animals 2023, 13, 1860. [Google Scholar] [CrossRef] [PubMed]
- Biney, J.K.M.; Saberioon, M.; Borůvka, L.; Houška, J.; Vašát, R.; Agyeman, P.C.; Coblinski, J.A.; Klement, A. Exploring the Suitability of UAS-Based Multispectral Images for Estimating Soil Organic Carbon: Comparison with Proximal Soil Sensing and Spaceborne Imagery. Remote Sens. 2021, 13, 308. [Google Scholar] [CrossRef]
- Sanchez, P.A.; Ahamed, S.; Carré, F.; Hartemink, A.E.; Hempel, J.; Huising, J.; Lagacherie, P.; McBratney, A.B.; McKenzie, N.J.; De Lourdes Mendonça-Santos, M.; et al. Digital Soil Map of the World. Science 2009, 325, 680–681. [Google Scholar] [CrossRef]
- Taghizadeh-Mehrjardi, R.; Nabiollahi, K.; Kerry, R. Digital Mapping of Soil Organic Carbon at Multiple Depths Using Different Data Mining Techniques in Baneh Region, Iran. Geoderma 2016, 266, 98–110. [Google Scholar] [CrossRef]
- Sodango, T.H.; Sha, J.; Li, X.; Noszczyk, T.; Shang, J.; Aneseyee, A.B.; Bao, Z. Modeling the Spatial Dynamics of Soil Organic Carbon Using Remotely-Sensed Predictors in Fuzhou City, China. Remote Sens. 2021, 13, 1682. [Google Scholar] [CrossRef]
- Goetz, S.; Dubayah, R. Advances in Remote Sensing Technology and Implications for Measuring and Monitoring Forest Carbon Stocks and Change. Carbon. Manag. 2011, 2, 231–244. [Google Scholar] [CrossRef]
- Paustian, K.; Collier, S.; Baldock, J.; Burgess, R.; Creque, J.; DeLonge, M.; Dungait, J.; Ellert, B.; Frank, S.; Goddard, T.; et al. Quantifying Carbon for Agricultural Soil Management: From the Current Status toward a Global Soil Information System. Carbon. Manag. 2019, 10, 567–587. [Google Scholar] [CrossRef]
- Teke, M.; Deveci, H.S.; Haliloglu, O.; Gurbuz, S.Z.; Sakarya, U. A Short Survey of Hyperspectral Remote Sensing Applications in Agriculture. In Proceedings of the RAST 2013—Proceedings of the 6th International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 12–14 June 2013; pp. 171–176. [Google Scholar] [CrossRef]
- Ge, Y.; Thomasson, J.A.; Sui, R. Remote Sensing of Soil Properties in Precision Agriculture: A Review. Front. Earth Sci. 2011, 5, 229–238. [Google Scholar] [CrossRef]
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. Onthe-Go Soil Sensors for Precision Agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef]
- Kühnel, A.; Bogner, C. In-Situ Prediction of Soil Organic Carbon by Vis–NIR Spectroscopy: An Efficient Use of Limited Field Data. Eur. J. Soil Sci. 2017, 68, 689–702. [Google Scholar] [CrossRef]
- Gomez, C.; Viscarra Rossel, R.A.; McBratney, A.B. Soil Organic Carbon Prediction by Hyperspectral Remote Sensing and Field Vis-NIR Spectroscopy: An Australian Case Study. Geoderma 2008, 146, 403–411. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Walvoort, D.J.J.; McBratney, A.B.; Janik, L.J.; Skjemstad, J.O. Visible, near Infrared, Mid Infrared or Combined Diffuse Reflectance Spectroscopy for Simultaneous Assessment of Various Soil Properties. Geoderma 2006, 131, 59–75. [Google Scholar] [CrossRef]
- Laamrani, A.; Berg, A.A.; Voroney, P.; Feilhauer, H.; Blackburn, L.; March, M.; Dao, P.D.; He, Y.; Martin, R.C. Ensemble Identification of Spectral Bands Related to Soil Organic Carbon Levels over an Agricultural Field in Southern Ontario, Canada. Remote Sens. 2019, 11, 1298. [Google Scholar] [CrossRef]
- Bai, Z.; Xie, M.; Hu, B.; Luo, D.; Wan, C.; Peng, J.; Shi, Z. Estimation of Soil Organic Carbon Using Vis-NIR Spectral Data and Spectral Feature Bands Selection in Southern Xinjiang, China. Sensors 2022, 22, 6124. [Google Scholar] [CrossRef] [PubMed]
- Uddin, M.P.; Mamun, M.A.; Hossain, M.A. PCA-Based Feature Reduction for Hyperspectral Remote Sensing Image Classification. IETE Tech. Rev. 2021, 38, 377–396. [Google Scholar] [CrossRef]
- Ibrahim, M.F.I.; Al-Jumaily, A.A. PCA Indexing Based Feature Learning and Feature Selection. In Proceedings of the 2016 8th Cairo International Biomedical Engineering Conference, CIBEC, Cairo, Egypt, 15–17 December 2016; pp. 68–71. [Google Scholar] [CrossRef]
- Geniaux, G.; Martinetti, D. A New Method for Dealing Simultaneously with Spatial Autocorrelation and Spatial Heterogeneity in Regression Models. Reg. Sci. Urban Econ. 2018, 72, 74–85. [Google Scholar] [CrossRef]
- Were, K.; Bui, D.T.; Dick, Ø.B.; Singh, B.R. A Comparative Assessment of Support Vector Regression, Artificial Neural Networks, and Random Forests for Predicting and Mapping Soil Organic Carbon Stocks across an Afromontane Landscape. Ecol. Indic. 2015, 52, 394–403. [Google Scholar] [CrossRef]
- Song, J.; Gao, J.; Zhang, Y.; Li, F.; Man, W.; Liu, M.; Wang, J.; Li, M.; Zheng, H.; Yang, X.; et al. Estimation of Soil Organic Carbon Content in Coastal Wetlands with Measured VIS-NIR Spectroscopy Using Optimized Support Vector Machines and Random Forests. Remote Sens. 2022, 14, 4372. [Google Scholar] [CrossRef]
- de Santana, F.B.; Otani, S.K.; de Souza, A.M.; Poppi, R.J. Comparison of PLS and SVM Models for Soil Organic Matter and Particle Size Using Vis-NIR Spectral Libraries. Geoderma Reg. 2021, 27, e00436. [Google Scholar] [CrossRef]
- Wilson, M.D. Support Vector Machines. Encycl. Ecol. 2008, 1–5, 3431–3437. [Google Scholar] [CrossRef]
- Pouladi, N.; Møller, A.B.; Tabatabai, S.; Greve, M.H. Mapping Soil Organic Matter Contents at Field Level with Cubist, Random Forest and Kriging. Geoderma 2019, 342, 85–92. [Google Scholar] [CrossRef]
- Grimm, R.; Behrens, T.; Märker, M.; Elsenbeer, H. Soil Organic Carbon Concentrations and Stocks on Barro Colorado Island—Digital Soil Mapping Using Random Forests Analysis. Geoderma 2008, 146, 102–113. [Google Scholar] [CrossRef]
- Sanderman, J.; Gholizadeh, A.; Pittaki-Chrysodonta, Z.; Huang, J.; Safanelli, J.L.; Ferguson, R. Transferability of a Large Mid-Infrared Soil Spectral Library between Two Fourier-Transform Infrared Spectrometers. Soil Sci. Soc. Am. J. 2023, 87, 586–599. [Google Scholar] [CrossRef]
- Castaldi, F.; Chabrillat, S.; van Wesemael, B. Sampling Strategies for Soil Property Mapping Using Multispectral Sentinel-2 and Hyperspectral EnMAP Satellite Data. Remote Sens. 2019, 11, 309. [Google Scholar] [CrossRef]
- Ward, K.J.; Brell, M.; Spengler, D.; Castaldi, F.; Neumann, C.; Segl, K.; Foerster, S.; Chabrillat, S.; Ward, K.J.; Brell, M.; et al. Mapping Soil Organic Carbon Based on Simulated EnMAP Images and the LUCAS Soil Spectral Library. In Proceedings of the EGU General Assembly Conference Abstracts, Virtual, 4–8 May 2020; p. 3013. [Google Scholar] [CrossRef]
- Ng, W.; Minasny, B.; Montazerolghaem, M.; Padarian, J.; Ferguson, R.; Bailey, S.; McBratney, A.B. Convolutional Neural Network for Simultaneous Prediction of Several Soil Properties Using Visible/near-Infrared, Mid-Infrared, and Their Combined Spectra. Geoderma 2019, 352, 251–267. [Google Scholar] [CrossRef]
- Svensen, J.L.; Cheng, X.; Boersma, S.; Sun, C. Chance-Constrained Stochastic MPC of Greenhouse Production Systems with Parametric Uncertainty. Comput. Electron. Agric. 2024, 217, 108578. [Google Scholar] [CrossRef]
- Montoya, A.P.; Guzmán, J.L.; Rodríguez, F.; Sánchez-Molina, J.A. A Hybrid-Controlled Approach for Maintaining Nocturnal Greenhouse Temperature: Simulation Study. Comput. Electron. Agric. 2016, 123, 116–124. [Google Scholar] [CrossRef]
- Bontsema, J.; Van Henten, E.J.; Gieling, T.H.; Swinkels, G.L.A.M. The Effect of Sensor Errors on Production and Energy Consumption in Greenhouse Horticulture. Comput. Electron. Agric. 2011, 79, 63–66. [Google Scholar] [CrossRef]
- van Mourik, S.; van Beveren, P.J.M.; López-Cruz, I.L.; van Henten, E.J. Improving Climate Monitoring in Greenhouse Cultivation via Model Based Filtering. Biosyst. Eng. 2019, 181, 40–51. [Google Scholar] [CrossRef]
- Boersma, S.; Van Mourik, S.; Xin, B.; Kootstra, G.; Bustos-Korts, D. Nonlinear Observability Analysis and Joint State and Parameter Estimation in a Lettuce Greenhouse Using Ensemble Kalman Filtering. IFAC-Pap. 2022, 55, 141–146. [Google Scholar] [CrossRef]
- Mazzocchi, F. Complexity in Biology. Exceeding the Limits of Reductionism and Determinism Using Complexity Theory. EMBO Rep. 2008, 9, 10. [Google Scholar] [CrossRef]
- Polotskaya, K.; Muñoz-Valencia, C.S.; Rabasa, A.; Quesada-Rico, J.A.; Orozco-Beltrán, D.; Barber, X. Bayesian Networks for the Diagnosis and Prognosis of Diseases: A Scoping Review. Mach. Learn. Knowl. Extr. 2024, 6, 1243–1262. [Google Scholar] [CrossRef]
- Stritih, A.; Rabe, S.E.; Robaina, O.; Grêt-Regamey, A.; Celio, E. An Online Platform for Spatial and Iterative Modelling with Bayesian Networks. Environ. Model. Softw. 2020, 127, 104658. [Google Scholar] [CrossRef]
- Masaracchia, L.; Fredes, F.; Woolrich, M.W.; Vidaurre, D. Computational Neuroscience: Dissecting Unsupervised Learning through Hidden Markov Modeling in Electrophysiological Data. J. Neurophysiol. 2023, 130, 364. [Google Scholar] [CrossRef]
- Mall, P.K.; Singh, P.K.; Srivastav, S.; Narayan, V.; Paprzycki, M.; Jaworska, T.; Ganzha, M. A Comprehensive Review of Deep Neural Networks for Medical Image Processing: Recent Developments and Future Opportunities. Healthc. Anal. 2023, 4, 100216. [Google Scholar] [CrossRef]
- Khanam, F.-T.-Z.; Al-Naji, A.; Chahl, J. Remote Monitoring of Vital Signs in Diverse Non-Clinical and Clinical Scenarios Using Computer Vision Systems: A Review. Appl. Sci. 2019, 9, 4474. [Google Scholar] [CrossRef]
- Kashiha, M.; Pluk, A.; Bahr, C.; Vranken, E.; Berckmans, D. Development of an Early Warning System for a Broiler House Using Computer Vision. Biosyst. Eng. 2013, 116, 36–45. [Google Scholar] [CrossRef]
- Karmakar, P.; Teng, S.W.; Murshed, M.; Pang, S.; Li, Y.; Lin, H. Crop Monitoring by Multimodal Remote Sensing: A Review. Remote Sens. Appl. 2024, 33, 101093. [Google Scholar] [CrossRef]
- Ghislieri, M.; Cerone, G.L.; Knaflitz, M.; Agostini, V. Long Short-Term Memory (LSTM) Recurrent Neural Network for Muscle Activity Detection. J. Neuroeng. Rehabil. 2021, 18, 153. [Google Scholar] [CrossRef] [PubMed]
- Bargagli Stoffi, F.J.; Cevolani, G.; Gnecco, G. Simple Models in Complex Worlds: Occam’s Razor and Statistical Learning Theory. Minds Mach. 2022, 32, 13–42. [Google Scholar] [CrossRef]
- Geman, S.; Bienenstock, E.; Doursat, R. Neural Networks and the Bias/Variance Dilemma. Neural Comput. 1992, 4, 1–58. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Badreldin, N.; Cheng, X.; Youssef, A. An Overview of Software Sensor Applications in Biosystem Monitoring and Control. Sensors 2024, 24, 6738. https://doi.org/10.3390/s24206738
Badreldin N, Cheng X, Youssef A. An Overview of Software Sensor Applications in Biosystem Monitoring and Control. Sensors. 2024; 24(20):6738. https://doi.org/10.3390/s24206738
Chicago/Turabian StyleBadreldin, Nasem, Xiaodong Cheng, and Ali Youssef. 2024. "An Overview of Software Sensor Applications in Biosystem Monitoring and Control" Sensors 24, no. 20: 6738. https://doi.org/10.3390/s24206738
APA StyleBadreldin, N., Cheng, X., & Youssef, A. (2024). An Overview of Software Sensor Applications in Biosystem Monitoring and Control. Sensors, 24(20), 6738. https://doi.org/10.3390/s24206738