
Development of Image-Based Water Level Sensor with High-Resolution and Low-Cost Using Image Processing Algorithm: Application to Outgassing Measurements from Gas-Enriched Polymer


Abstract
:1. Introduction
2. Materials and Methods
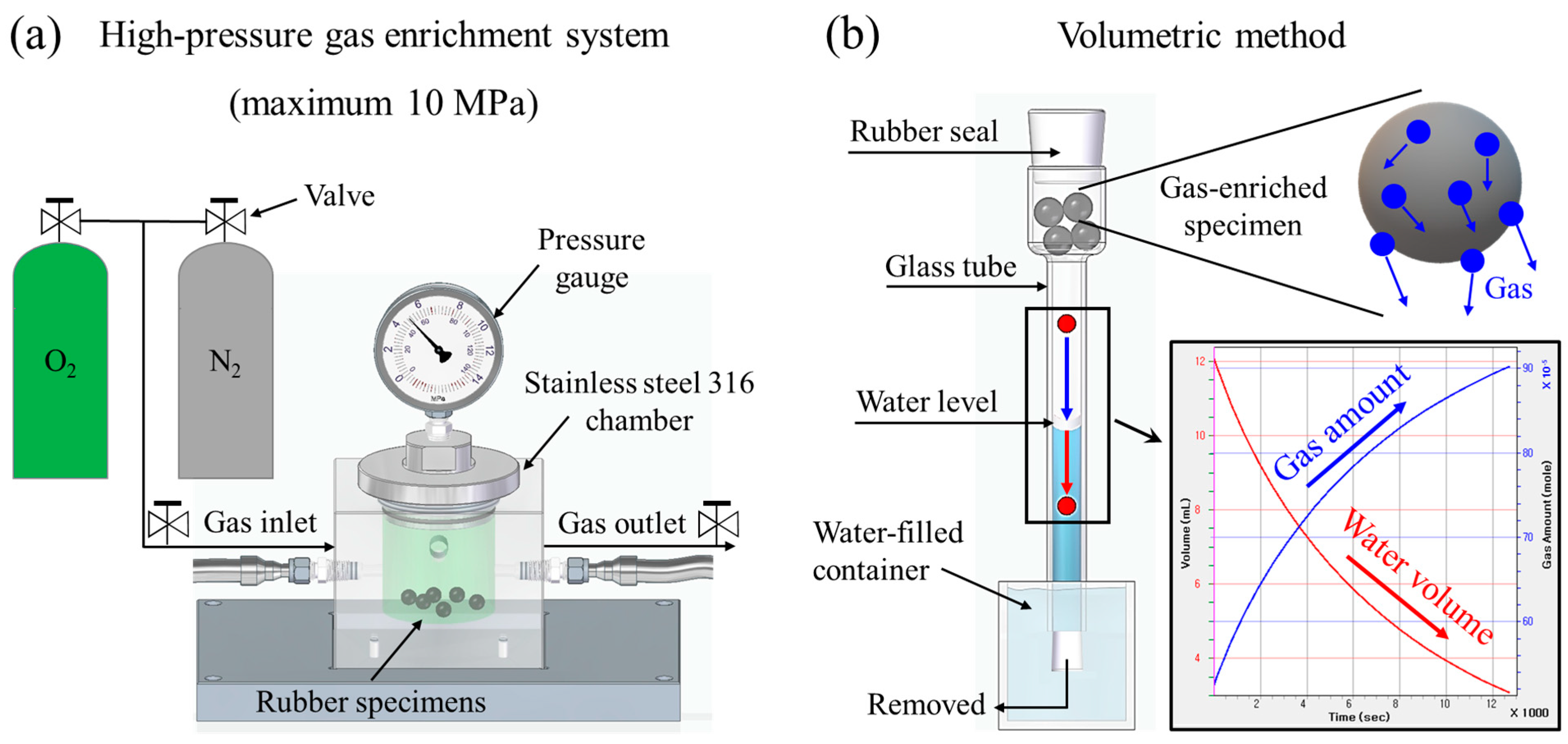
2.1. Preparation of Gas-Enriched Specimen
2.2. Volumetric Method
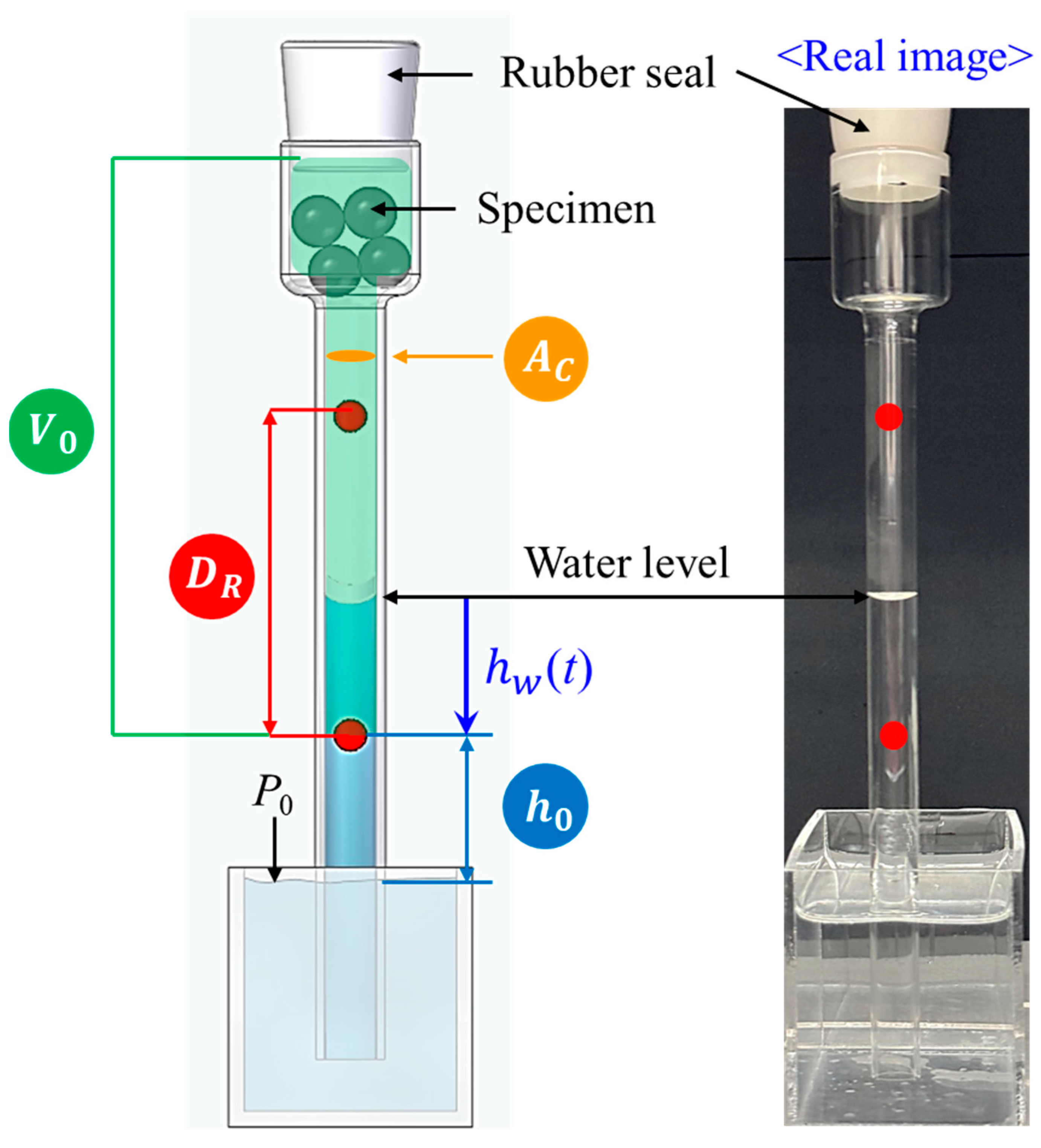
- [cm2]: inner cross-sectional area of the thin part of the glass tube.
- [mL]: the volume of empty space between the bottom red circle marker and the rubber seal.
- [cm]: the distance between two red circle markers, designated as the water level measurement range.
- [cm]: the height from the water surface to the bottom red circle marker.
3. Developed Water Level Sensor
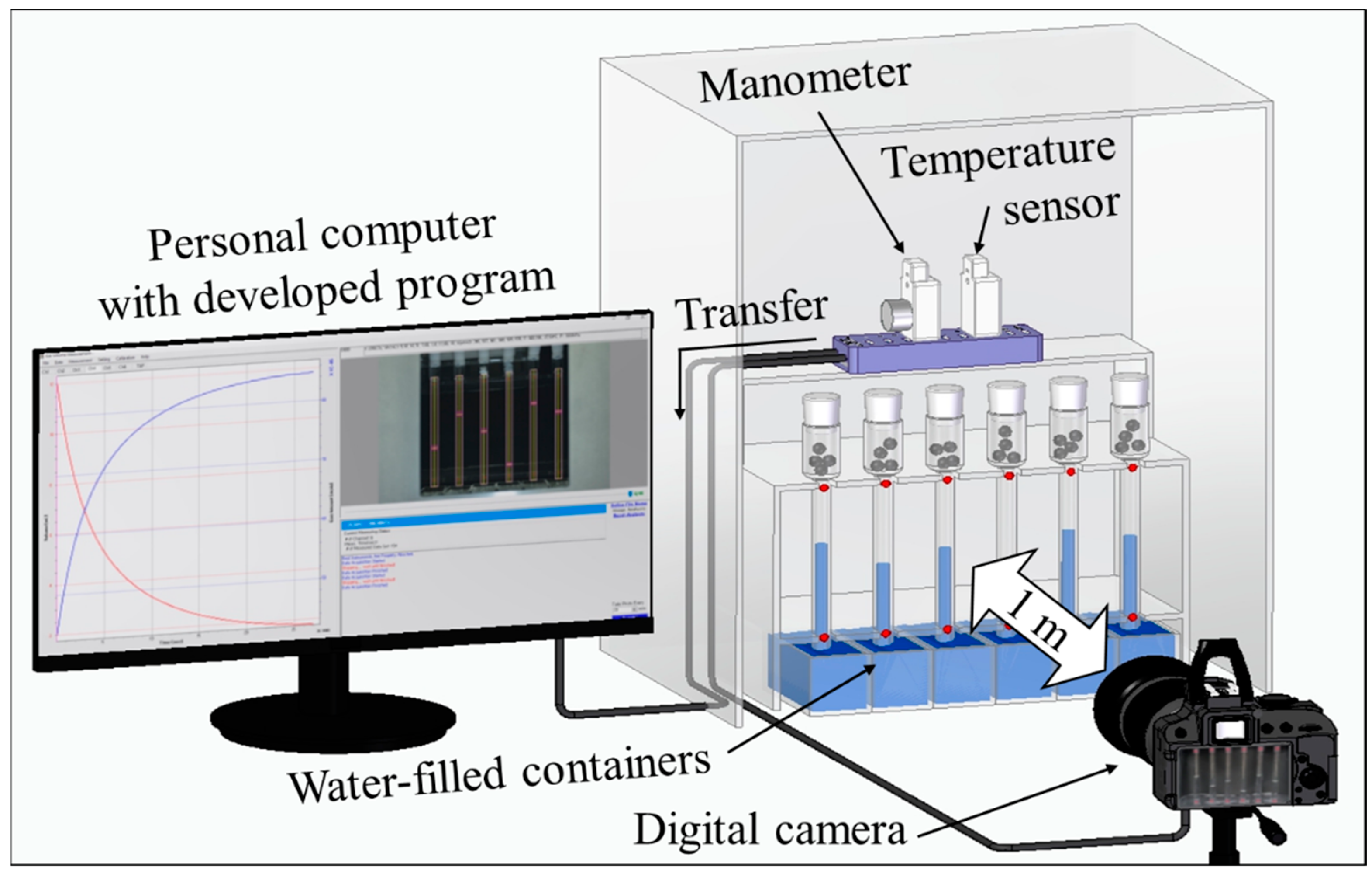
3.1. Water Level Sensing System
3.2. Water Level Sensing Program
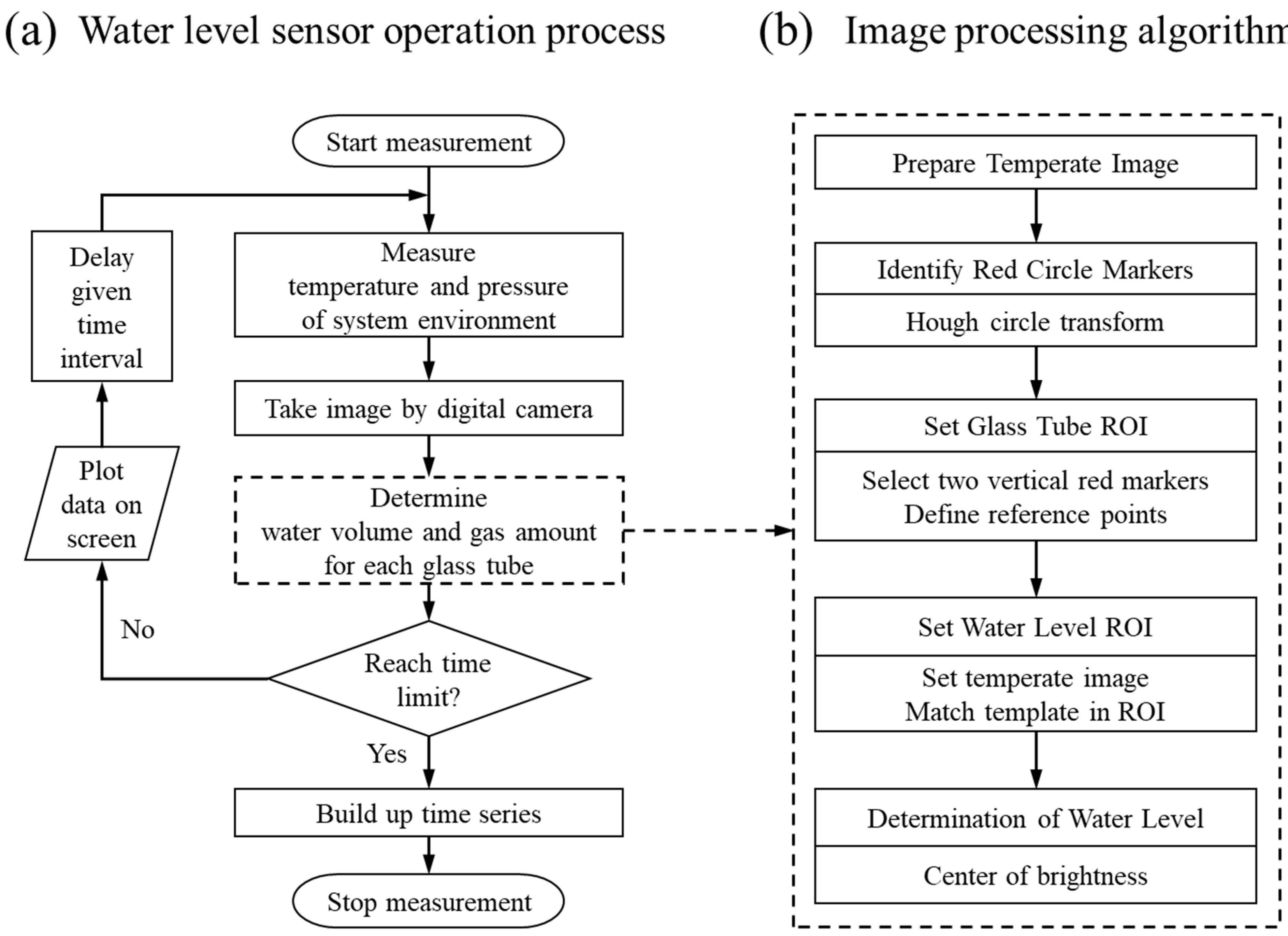
3.3. Water Level Sensing Process
4. Image Processing Algorithm
4.1. Identify Red Circle Markers
4.2. Set Glass Tube ROI
4.3. Set Water Level ROI
4.4. Determination of Water Level
- (1)
- The blue rectangle in Figure 8a indicates that the brightness analysis region is limited to only the central 50-pixel width and 100-pixel height of the water level ROI. The edge of the crescent-shaped water level is generally steeper as the tube diameter decreases. The partial deformation of the crescent-shaped edge by the change in the glass tube diameter can affect the brightness analysis of the crescent shape. Thus, we excluded the influence of the edges by limiting the brightness analysis width of the water level ROI.
- (2)
- The results of the brightness analysis can be expressed as gray levels ranging from 0 for black to 255 for white [48]. Figure 8b shows 100 points of gray levels corresponding to each pixel from 0 to 99 vertically in the limited-width image of 50 pixels. The magnitudes of the gray levels are expressed as a horizontal histogram, indicated by blue rods. The image behind the histogram is the limited-width image in Figure 8a stretched along the x-axis. According to the histogram in Figure 8b, the brightest location is presented as a maximum gray level of 128.0 at a 55-pixel location. Furthermore, unnecessary gray levels ranging from 12.6 to 22.8 were observed in the dark region of the limited-width image.
- (3)
- The unnecessary gray levels, observed as a dark region, were removed for more accurate water level determination by setting a threshold. As shown in Figure 8c, the threshold value was defined as 31.9, which is 85% of the average (37.5) of the 100 gray levels. Thus, the gray levels below the threshold were removed. The threshold corresponding to 85% of the average was sufficient to remove the unnecessary gray levels caused by the laboratory lighting. After the removal of the threshold, the remaining gray levels are generated starting with a threshold as zero. After this process, CB analysis is performed to determine the water level using only the pixel locations versus the remaining gray levels.
- (4)
- CB is a pixel point representing the average position of the brightness in the gray levels of the white crescent-shaped water level image. Figure 8d shows the pixel location of CB () in the crescent shape; this location is determined by analyzing the pixel location versus the remaining gray levels. was calculated using the following equation:where is a pixel location and is the remaining gray level corresponding to . Thus, assuming that the water level is determined only for 100 pixels in Figure 8a, the pixel location of 56.6 (), indicated by the red arrow in Figure 8d, is determined to be the water level.
5. Results and Discussion
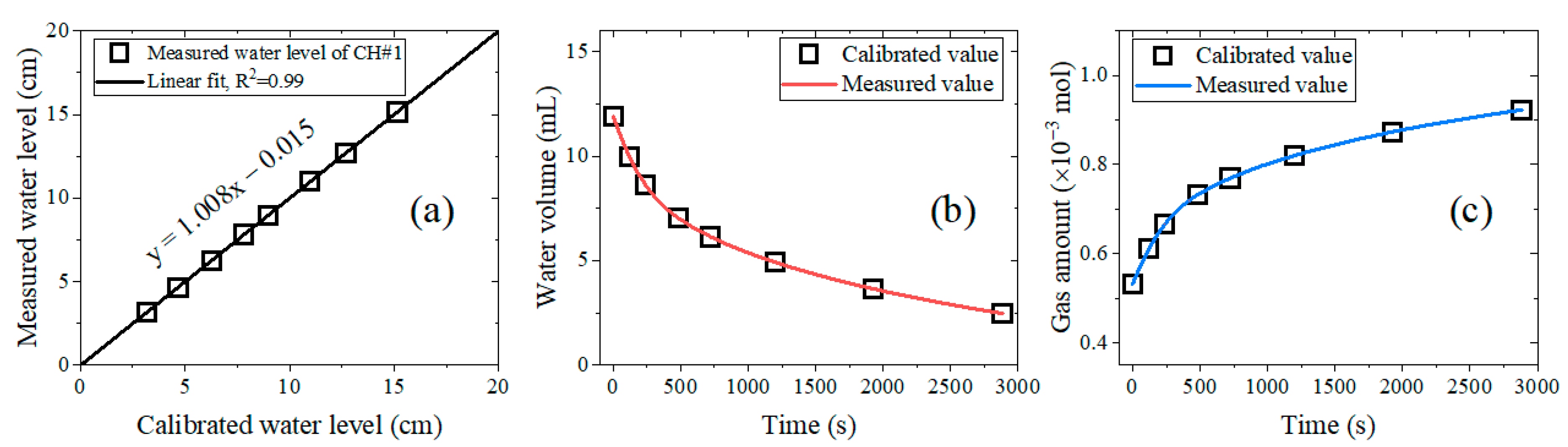
5.1. Measurement of the Water Level and Gas Amount
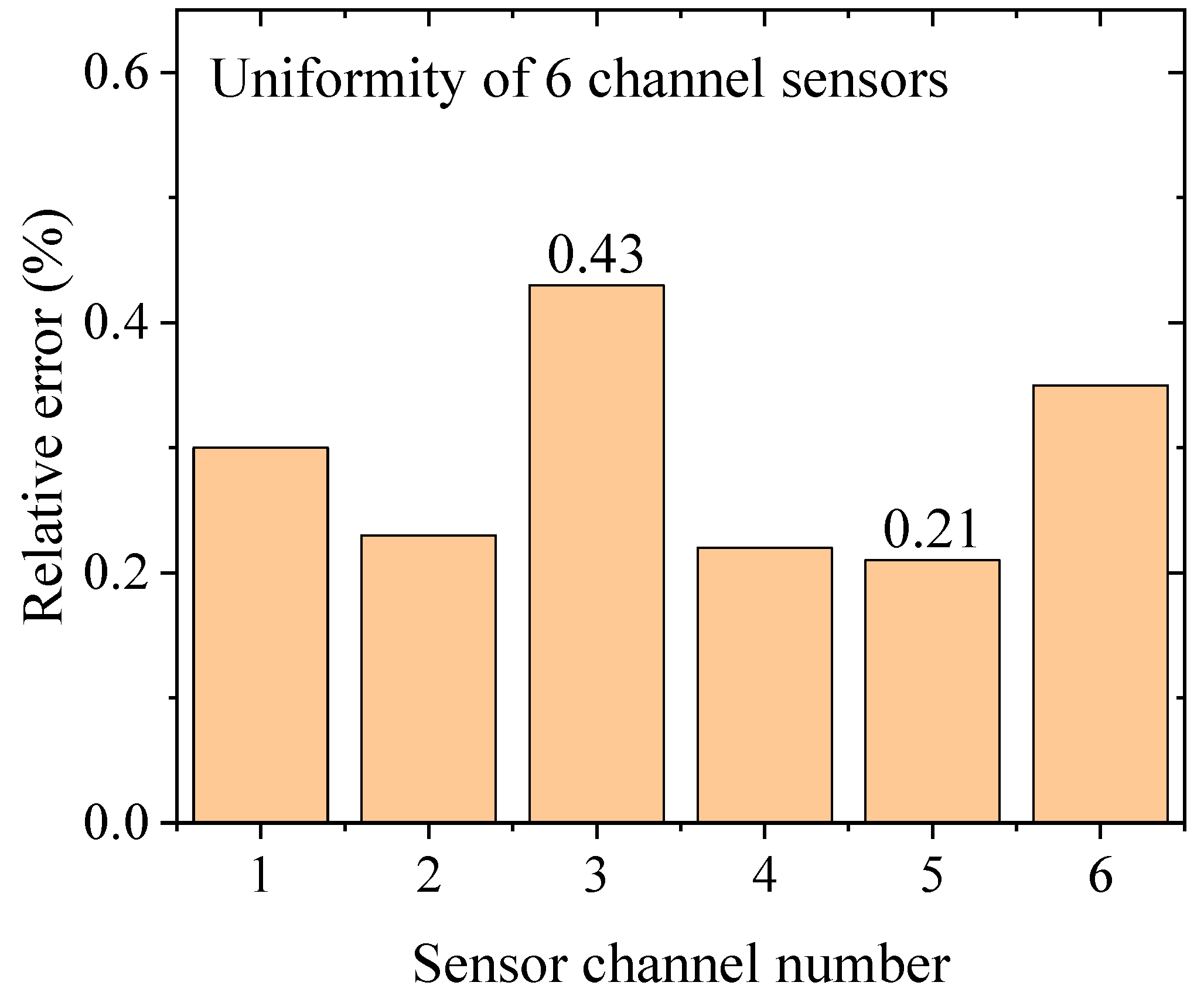
5.2. Performance Test for the Developed Water Level Sensor
6. Conclusions
- (1)
- An effective high-resolution and low-cost technique for measuring water level and gas concentration;
- (2)
- An automatic measurable technique involving the application of a dedicated water level sensing program;
- (3)
- A sophisticated image processing algorithm of the water level by calculating the center of brightness of the white crescent-shaped water level;
- (4)
- A visible technique to immediately track changes in the water level and gas emission.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Joshi, P.C.; Chopade, N.; Chhibber, B. Liquid level sensing and control using inductive pressure sensor. Proceedings of 2017 the International Conference on Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 17–18 August 2017; pp. 1–5. [Google Scholar]
- Liu, S.; Tian, J.; Liu, N.; Xia, J.; Lu, P. Temperature insensitive liquid level sensor based on antiresonant reflecting guidance in silica tube. J. Light. Technol. 2016, 34, 5239–5243. [Google Scholar] [CrossRef]
- Liu, X.; Bamberg, S.; Bamberg, E. Increasing the accuracy of level-based volume detection of medical liquids in test tubes by including the optical effect of the meniscus. Measurement 2011, 44, 750–761. [Google Scholar] [CrossRef]
- Meera, C.; Sunny, S.; Singh, R.; Sairam, P.S.; Kumar, R.; Emannuel, J. Automated precise liquid transferring system. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–6. [Google Scholar]
- Loizou, K.; Koutroulis, E. Water level sensing: State of the art review and performance evaluation of a low-cost measurement system. Measurement 2016, 89, 204–214. [Google Scholar] [CrossRef]
- Antunes, P.; Dias, J.; Paixão, T.; Mesquita, E.; Varum, H.; André, P. Liquid level gauge based in plastic optical fiber. Measurement 2015, 66, 238–243. [Google Scholar] [CrossRef]
- Marques, C.A.; Peng, G.-D.; Webb, D.J. Highly sensitive liquid level monitoring system utilizing polymer fiber Bragg gratings. Opt. Express 2015, 23, 6058–6072. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Melack, J.M.; Dunne, T.; Mertes, L.A.; Hess, L.L.; Smith, L.C. Interferometric radar measurements of water level changes on the Amazon flood plain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef]
- Kim, S.-W.; Choi, H.-S.; Park, D.-U.; Baek, E.-R.; Kim, J.-M. Water level response measurement in a steel cylindrical liquid storage tank using image filter processing under seismic excitation. Mech. Syst. Signal Process. 2018, 101, 274–291. [Google Scholar] [CrossRef]
- Nair, B.B.; Rao, S. Flood water depth estimation—A survey. In Proceedings of the 2016 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Chennai, India; 2016; pp. 1–4. [Google Scholar]
- Ridolfi, E.; Manciola, P. Water level measurements from drones: A pilot case study at a dam site. Water 2018, 10, 297. [Google Scholar] [CrossRef]
- Liu, M.; Wang, C.; Huang, W.; Wang, X.; Li, S.; Lu, P.; Liu, X.; Jiang, E. Research on water level measurement technology based on the residual length ratio of image characters. Signal Image Video Process. 2024, 18, 57–70. [Google Scholar] [CrossRef]
- Circone, S.; Kirby, S.; Pinkston, J.; Stern, L. Measurement of gas yields and flow rates using a custom flowmeter. Rev. Sci. Instrum. 2001, 72, 2709–2716. [Google Scholar] [CrossRef]
- Pavani, G.J.; Pavani, S.A.; Ferreira, C.A. Gas permeameter in polymer nanocomposite plates: Construction and validation. Iran. Polym. J. 2021, 30, 583–591. [Google Scholar] [CrossRef]
- Jung, J.K.; Kim, I.G.; Kim, K.T.; Ryu, K.S.; Chung, K.S. Evaluation techniques of hydrogen permeation in sealing rubber materials. Polym. Test. 2021, 93, 107016. [Google Scholar] [CrossRef]
- Jung, J.K.; Kim, I.G.; Jeon, S.K.; Kim, K.-T.; Baek, U.B.; Nahm, S.H. Volumetric analysis technique for analyzing the transport properties of hydrogen gas in cylindrical-shaped rubbery polymers. Polym. Test. 2021, 99, 107147. [Google Scholar] [CrossRef]
- Vasiliev, A.; Pisliakov, A.; Sokolov, A.; Polovko, O.; Samotaev, N.; Kujawski, W.; Rozicka, A.; Guarnieri, V.; Lorencelli, L. Gas sensor system for the determination of methane in water. Procedia Eng. 2014, 87, 1445–1448. [Google Scholar] [CrossRef]
- Luo, Y.; Hu, L.; Ochs, F.; Tosatto, A.; Xu, G.; Tian, Z.; Dahash, A.; Yu, J.; Yuan, G.; Chen, Y. Semi-analytical modeling of large-scale water tank for seasonal thermal storage applications. Energy Build. 2023, 278, 112620. [Google Scholar] [CrossRef]
- Sahoo, A.K.; Udgata, S.K. A novel ANN-based adaptive ultrasonic measurement system for accurate water level monitoring. IEEE Trans. Instrum. Meas. 2019, 69, 3359–3369. [Google Scholar] [CrossRef]
- Zakaria, Z.; Idroas, M.; Samsuri, A.; Adam, A.A. Ultrasonic instrumentation system for Liquefied Petroleum Gas level monitoring. J. Nat. Gas Sci. Eng. 2017, 45, 428–435. [Google Scholar] [CrossRef]
- Stateczny, A. Radar water level sensors for full implementation of the river information services of border and lower section of the Oder in Poland. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–5. [Google Scholar]
- Jung, J.; Kim, G.; Gim, G.; Park, C.; Lee, J. Determination of gas permeation properties in polymer using capacitive electrode sensors. Sensors 2022, 22, 1141. [Google Scholar] [CrossRef]
- Ohira, S.-I.; Goto, K.; Toda, K.; Dasgupta, P.K. A capacitance sensor for water: Trace moisture measurement in gases and organic solvents. Anal. Chem. 2012, 84, 8891–8897. [Google Scholar] [CrossRef]
- Loizou, K.; Koutroulis, E.; Zalikas, D.; Liontas, G. A low-cost capacitive sensor for water level monitoring in large-scale storage tanks. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1416–1421. [Google Scholar]
- Jung, J.K.; Lee, J.H. High-performance hydrogen gas sensor system based on transparent coaxial cylinder capacitive electrodes and a volumetric analysis technique. Sci. Rep. 2024, 14, 1967. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, Y.; Liu, H.; Gao, H. In-situ water level measurement using NIR-imaging video camera. Flow Meas. Instrum. 2019, 67, 95–106. [Google Scholar] [CrossRef]
- Hou, Y.; Li, Q.; Zhang, C.; Lu, G.; Ye, Z.; Chen, Y.; Wang, L.; Cao, D. The State-of-the-Art Review on Applications of Intrusive Sensing, Image Processing Techniques, and Machine Learning Methods in Pavement Monitoring and Analysis. Engineering 2021, 7, 845–856. [Google Scholar] [CrossRef]
- Liu, J.G.; Mason, P.J. Image Processing and GIS for Remote Sensing: Techniques and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2024. [Google Scholar]
- Lan, H.; Song, Z.; Bao, H.; Ma, Y.; Yan, C.; Liu, S.; Wang, J. Shear strength parameters identification of loess interface based on borehole micro static cone penetration system. Geoenviron. Disasters 2024, 11, 24. [Google Scholar] [CrossRef]
- Mennel, L.; Symonowicz, J.; Wachter, S.; Polyushkin, D.K.; Molina-Mendoza, A.J.; Mueller, T. Ultrafast machine vision with 2D material neural network image sensors. Nature 2020, 579, 62–66. [Google Scholar] [CrossRef] [PubMed]
- Lan, H.; Liu, X.; Li, L.; Li, Q.; Tian, N.; Peng, J. Remote sensing precursors analysis for giant landslides. Remote Sens. 2022, 14, 4399. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A review on unmanned aerial vehicle remote sensing: Platforms, sensors, data processing methods, and applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Alakarhu, J. Image sensors and image quality in mobile phones. In International Image Sensor Workshop; Citeseer: Ogunquit, ME, USA, 2007; pp. 1–4. [Google Scholar]
- Suzuki, T. Challenges of image-sensor development. In Proceedings of the 2010 IEEE International Solid-State Circuits Conference-(ISSCC), San Francisco, CA, USA, 7–11 February 2010; pp. 27–30. [Google Scholar]
- Qiao, G.; Yang, M.; Wang, H. A water level measurement approach based on YOLOv5s. Sensors 2022, 22, 3714. [Google Scholar] [CrossRef]
- Wang, X.; Li, Z.; Zhang, Y.; An, G. Water level recognition based on deep learning and character interpolation strategy for stained water gauge. River 2023, 2, 506–517. [Google Scholar] [CrossRef]
- Gilmore, T.E.; Birgand, F.; Chapman, K.W. Source and magnitude of error in an inexpensive image-based water level measurement system. J. Hydrol. 2013, 496, 178–186. [Google Scholar] [CrossRef]
- Yun, H.S.; Jeon, S.K.; Lee, Y.-K.; Park, J.S.; Nahm, S.H. Effect of precharging methods on the hydrogen embrittlement of 304 stainless steel. Int. J. Hydrogen Energy 2024, 50, 175–188. [Google Scholar] [CrossRef]
- Lee, J.-H.; Kim, Y.-W.; Jung, J.-K. Investigation of the Gas Permeation Properties Using the Volumetric Analysis Technique for Polyethylene Materials Enriched with Pure Gases under High Pressure: H2, He, N2, O2 and Ar. Polymers 2023, 15, 4019. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.H.; Kim, Y.W.; Chung, N.K.; Kang, H.M.; Moon, W.J.; Choi, M.C.; Jung, J.K. Multiphase modeling of pressure-dependent hydrogen diffusivity in fractal porous structures of acrylonitrile butadiene rubber-carbon black composites with different fillers. Polymer 2024, 311, 127552. [Google Scholar] [CrossRef]
- Jung, J.K.; Kim, I.G.; Chung, K.S.; Baek, U.B. Gas chromatography techniques to evaluate the hydrogen permeation characteristics in rubber: Ethylene propylene diene monomer. Sci. Rep. 2021, 11, 4859. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.K.; Lee, J.H.; Park, J.Y.; Jeon, S.K. Modeling of the Time-Dependent H2 Emission and Equilibrium Time in H2-Enriched Polymers with Cylindrical, Spherical and Sheet Shapes and Comparisons with Experimental Investigations. Polymers 2024, 16, 2158. [Google Scholar] [CrossRef]
- Jung, J.K.; Kim, K.-T.; Lee, J.H.; Baek, U.B. Effective and low-cost gas sensor based on a light intensity analysis of a webcam image: Gas enriched polymers under high pressure. Sens. Actuators B Phys. 2023, 393, 134258. [Google Scholar] [CrossRef]
- Jung, J.K. Review of Developed Methods for Measuring Gas Uptake and Diffusivity in Polymers Enriched by Pure Gas under High Pressure. Polymers 2024, 16, 723. [Google Scholar] [CrossRef]
- Thomas, A.M.; Cross, J.L. Micrometer U-tube manometers for medium-vacuum measurements. NBS Spec. Publ. 1972, 8, 477. [Google Scholar] [CrossRef]
- Mukhopadhyay, P.; Chaudhuri, B.B. A survey of Hough Transform. Pattern Recognit. 2015, 48, 993–1010. [Google Scholar] [CrossRef]
- Brunelli, R. Template Matching Techniques in Computer Vision: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Bovik, A.C. Basic gray level image processing. In The Essential Guide to Image Processing; Elsevier: Amsterdam, The Netherlands, 2009; pp. 43–68. [Google Scholar]
- Creutin, J.; Muste, M.; Bradley, A.; Kim, S.; Kruger, A. River gauging using PIV techniques: A proof of concept experiment on the Iowa River. J. Hydrol. 2003, 277, 182–194. [Google Scholar] [CrossRef]
- Muste, M.; Fujita, I.; Hauet, A. Large-scale particle image velocimetry for measurements in riverine environments. Water Resour. Res. 2008, 44, W00D19. [Google Scholar] [CrossRef]
- ATO. Ultrasonic Water Level Sensor (ATO-LEVS-ZP). Available online: https://www.ato.com/ultrasonic-level-sensor-40m (accessed on 24 March 2024).
- Apure. KS-SMY1 Hydrostatic Water Level Sensor. Available online: https://apureinstrument.com/level-measurement/hydrostatic-level-sensor/ks-smy1-hydrostatic-water-level-sensor/ (accessed on 7 July 2024).
- Makridakis, S. Accuracy measures: Theoretical and practical concerns. Int. J. Forecast. 1993, 9, 527–529. [Google Scholar] [CrossRef]
- Ku, H.H. Notes on the use of propagation of error formulas. J. Res. Natl. Bur. Stand. 1966, 70, 263. [Google Scholar] [CrossRef]
- Trisna, B.A.; Park, S.; Lee, J. Significant impact of the covid-19 pandemic on methane emissions evaluated by comprehensive statistical analysis of satellite data. Sci. Rep. 2024, 14, 22475. [Google Scholar] [CrossRef] [PubMed]
- Saltelli, A. Sensitivity analysis for importance assessment. Risk Anal. 2002, 22, 579–590. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Item | Developed Water Level Sensor | Ultrasonic Water Level Sensor [51] | Capacitive Water Level Sensor [52] |
|---|---|---|---|
| Accuracy | 0.9% | 0.5% | 0.5% |
| Sensitivity | 0.06 mm/pixel | not specified | not specified |
| Resolution | 0.06 mm | 1 mm | not specified |
| Stability | 0.3% | not specified | 0.2% |
| Measurement range | 0.3 m | 5.0 m | 10.0 m |
| Response time | 1.0 s | 0.5 s | 0.5 s |
| Cost | USD 80 | USD 480 | USD 110 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.H.; Jung, J.K. Development of Image-Based Water Level Sensor with High-Resolution and Low-Cost Using Image Processing Algorithm: Application to Outgassing Measurements from Gas-Enriched Polymer. Sensors 2024, 24, 7699. https://doi.org/10.3390/s24237699
Lee JH, Jung JK. Development of Image-Based Water Level Sensor with High-Resolution and Low-Cost Using Image Processing Algorithm: Application to Outgassing Measurements from Gas-Enriched Polymer. Sensors. 2024; 24(23):7699. https://doi.org/10.3390/s24237699
Chicago/Turabian StyleLee, Ji Hun, and Jae Kap Jung. 2024. "Development of Image-Based Water Level Sensor with High-Resolution and Low-Cost Using Image Processing Algorithm: Application to Outgassing Measurements from Gas-Enriched Polymer" Sensors 24, no. 23: 7699. https://doi.org/10.3390/s24237699
APA StyleLee, J. H., & Jung, J. K. (2024). Development of Image-Based Water Level Sensor with High-Resolution and Low-Cost Using Image Processing Algorithm: Application to Outgassing Measurements from Gas-Enriched Polymer. Sensors, 24(23), 7699. https://doi.org/10.3390/s24237699