Cognitive Response of Underground Car Driver Observed by Brain EEG Signals



Abstract
:1. Introduction
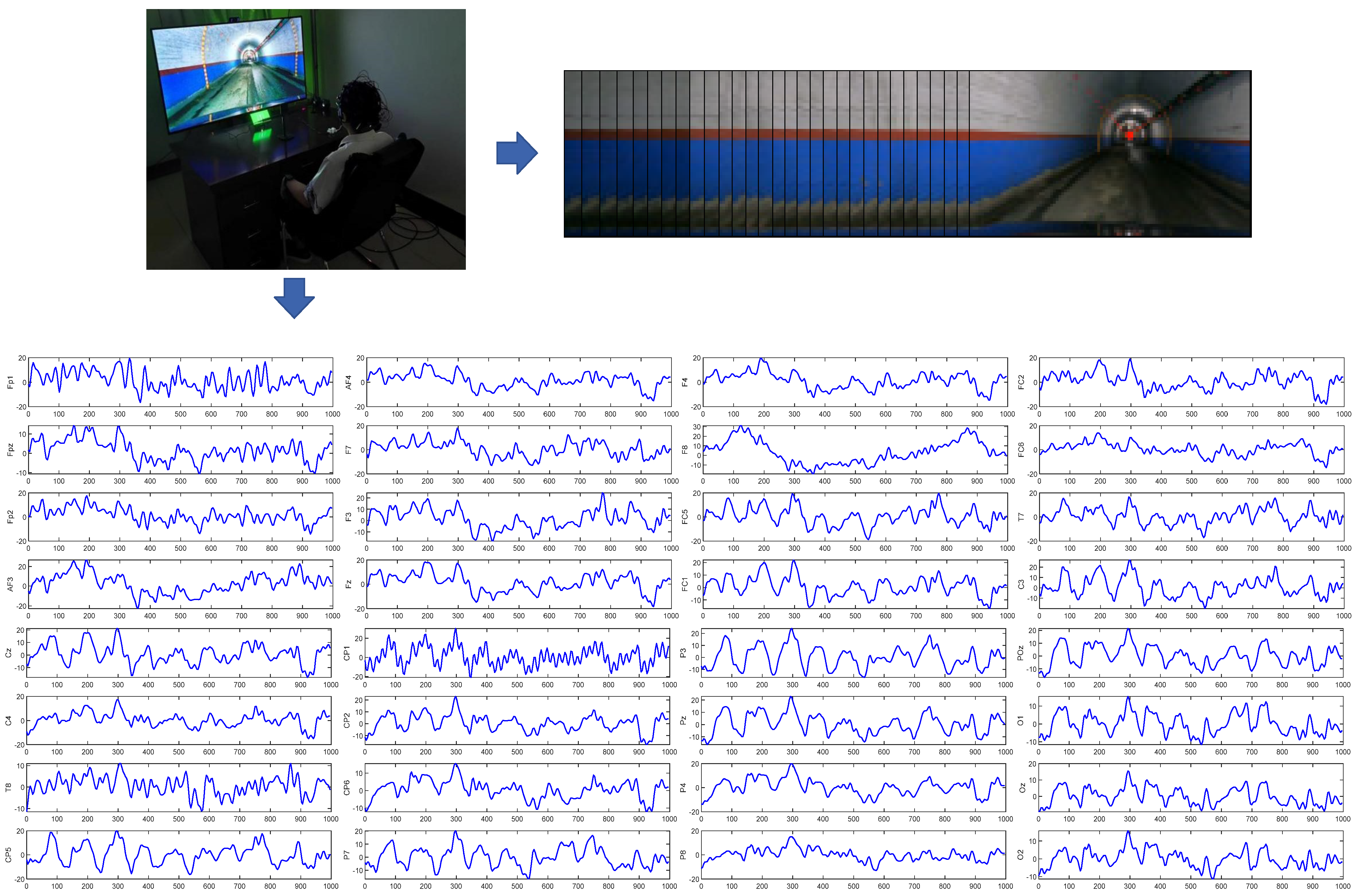
- In a laboratory environment, we simulated various underground coal mine driving scenarios and collected real-time EEG and physiological data from multiple subjects. By utilizing eye tracking devices and EEG equipment, we recorded the eye movement patterns and brain activity of subjects while they watched videos of the mine transport vehicle. This approach ensured the accuracy and comprehensiveness of the experimental data.
- The study investigates the effects of different types of mine transport vehicle interaction stimuli, such as dynamic and static interactions, on the EEG signals of subjects.
- We employ time domain analysis, frequency domain analysis, and feature value analysis to conduct a comprehensive examination of EEG signals under various interaction stimuli experienced by subjects. Specifically, we analyze changes in EEG signals and cognitive state responses of subjects during the interaction preparation phase, the interaction process, and the recovery driving phase. This investigation reveals the neurophysiological characteristics and psychological states of drivers managing vehicle interactions in coal mine environments.
2. Materials and Methods
2.1. Experimental Platform and Equipment
2.2. Stimulus Materials
2.3. Experimental Personnel
2.4. Experimental Procedure
2.5. Data Processing
3. Results and Discussion
3.1. The Effects of Dynamic Interaction Stimuli in Underground Mine on Driver EEG Signals
3.1.1. Time Domain Analysis of EEG Signals Under Dynamic Vehicle Interaction Stimuli
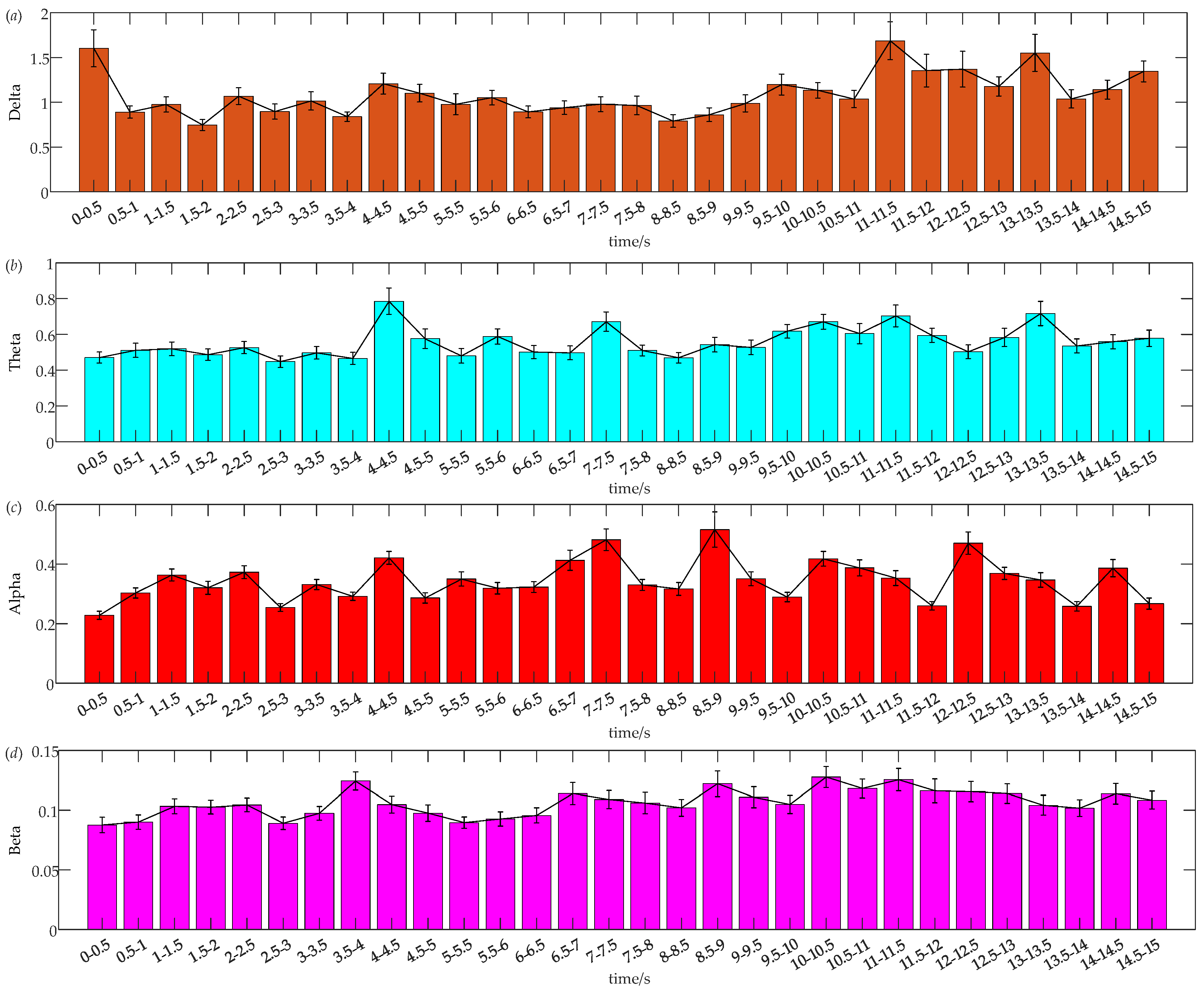
3.1.2. Frequency Domain Analysis of EEG Signals Under Dynamic Vehicle Interaction Stimuli
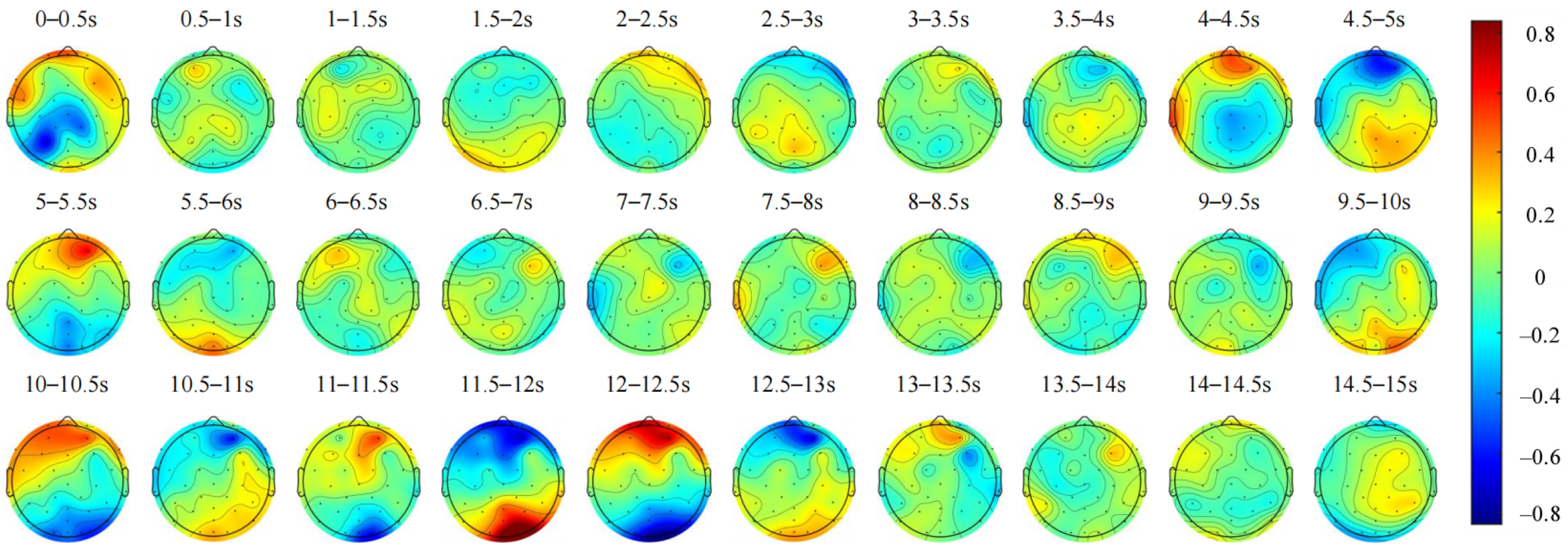
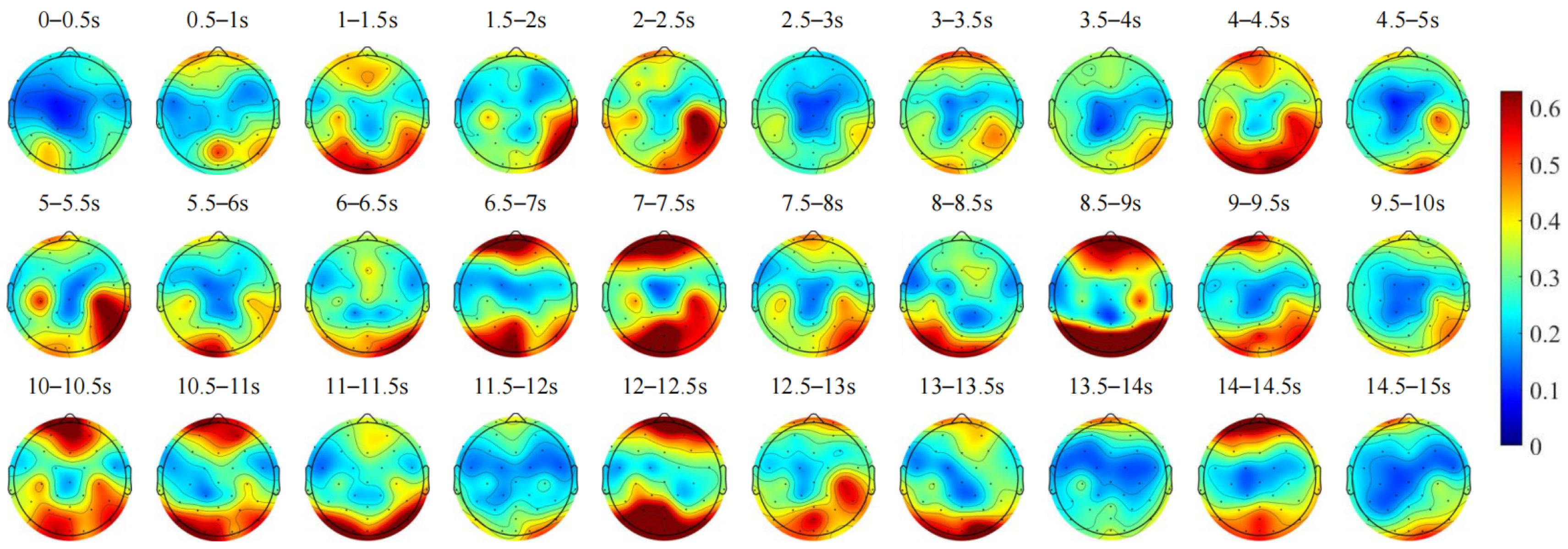
3.1.3. Characteristics Analysis of EEG Signals Under Dynamic Vehicle Interaction Stimuli
3.2. The Effects of Static Interaction Stimuli in Underground Mine on Driver EEG Signals
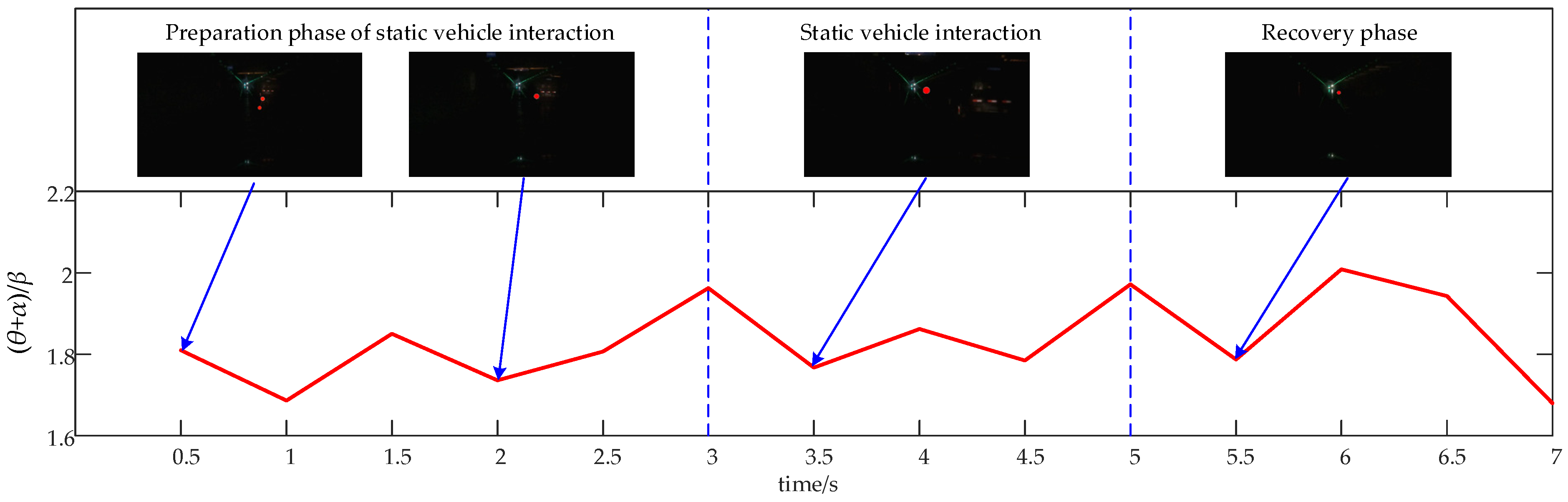
3.2.1. Characteristics Analysis of EEG Signals Under Static Vehicle Interaction Stimuli
3.2.2. Characteristics Analysis of EEG Signals Under Personnel Interaction Stimuli
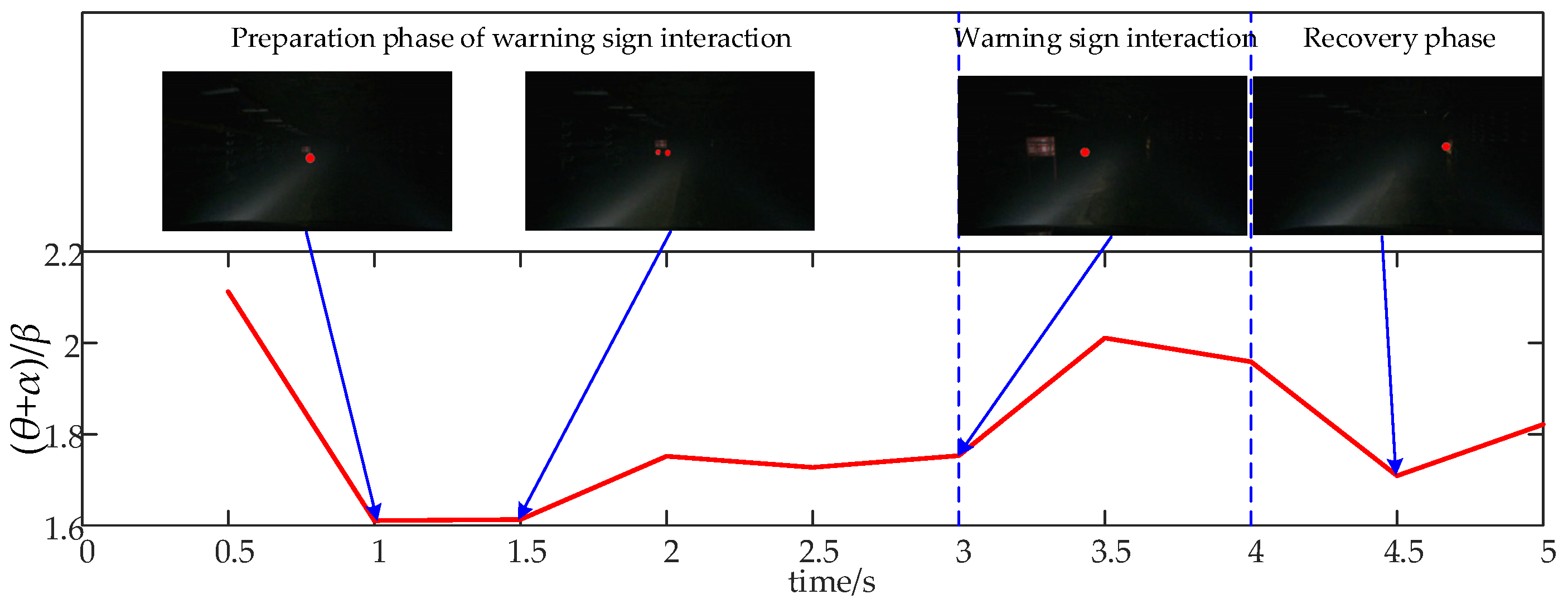
3.2.3. Characteristics Analysis of EEG Signals Under Obstacle Interaction Stimuli
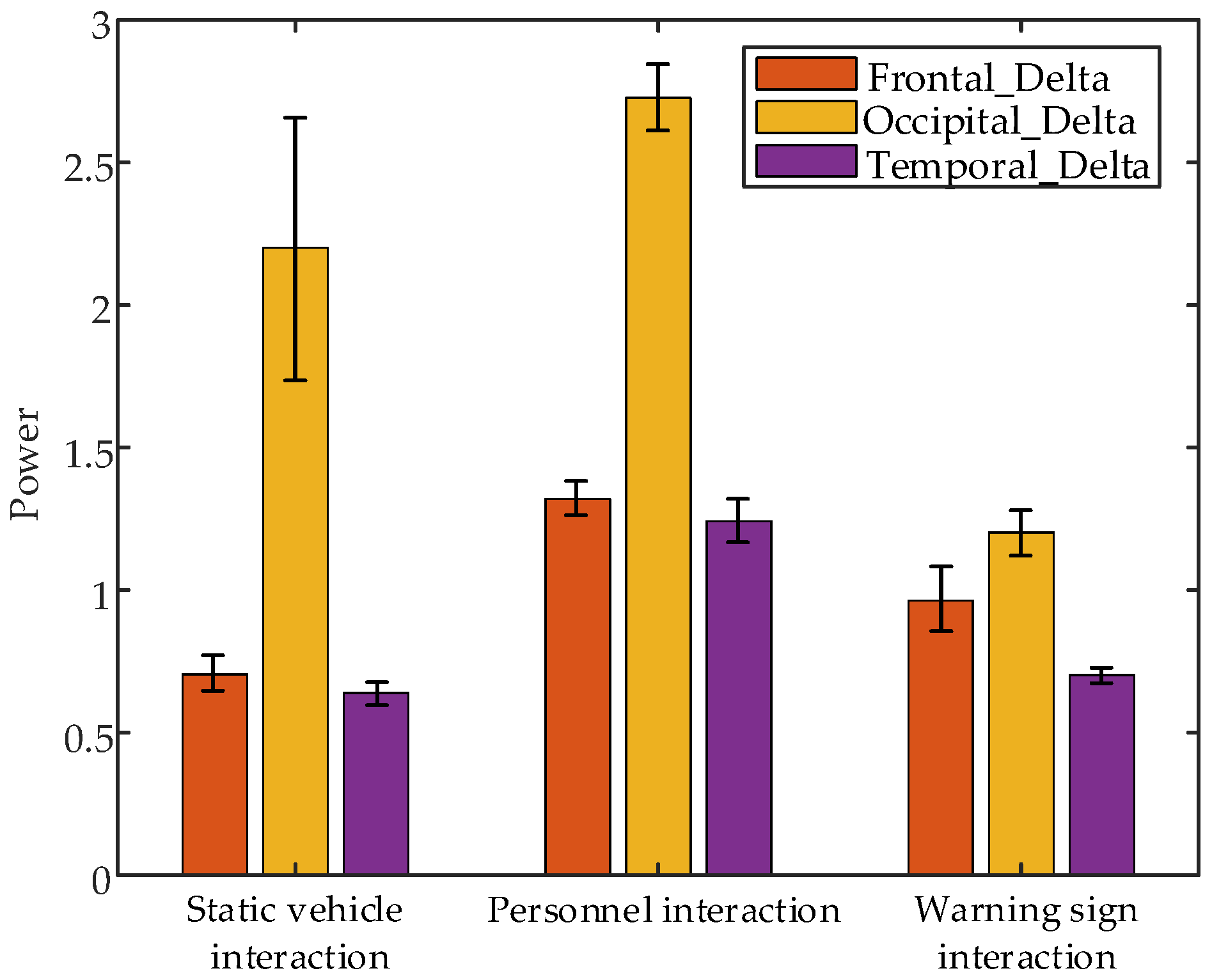
3.3. Different Interaction Object Stimulus Correlation Analysis
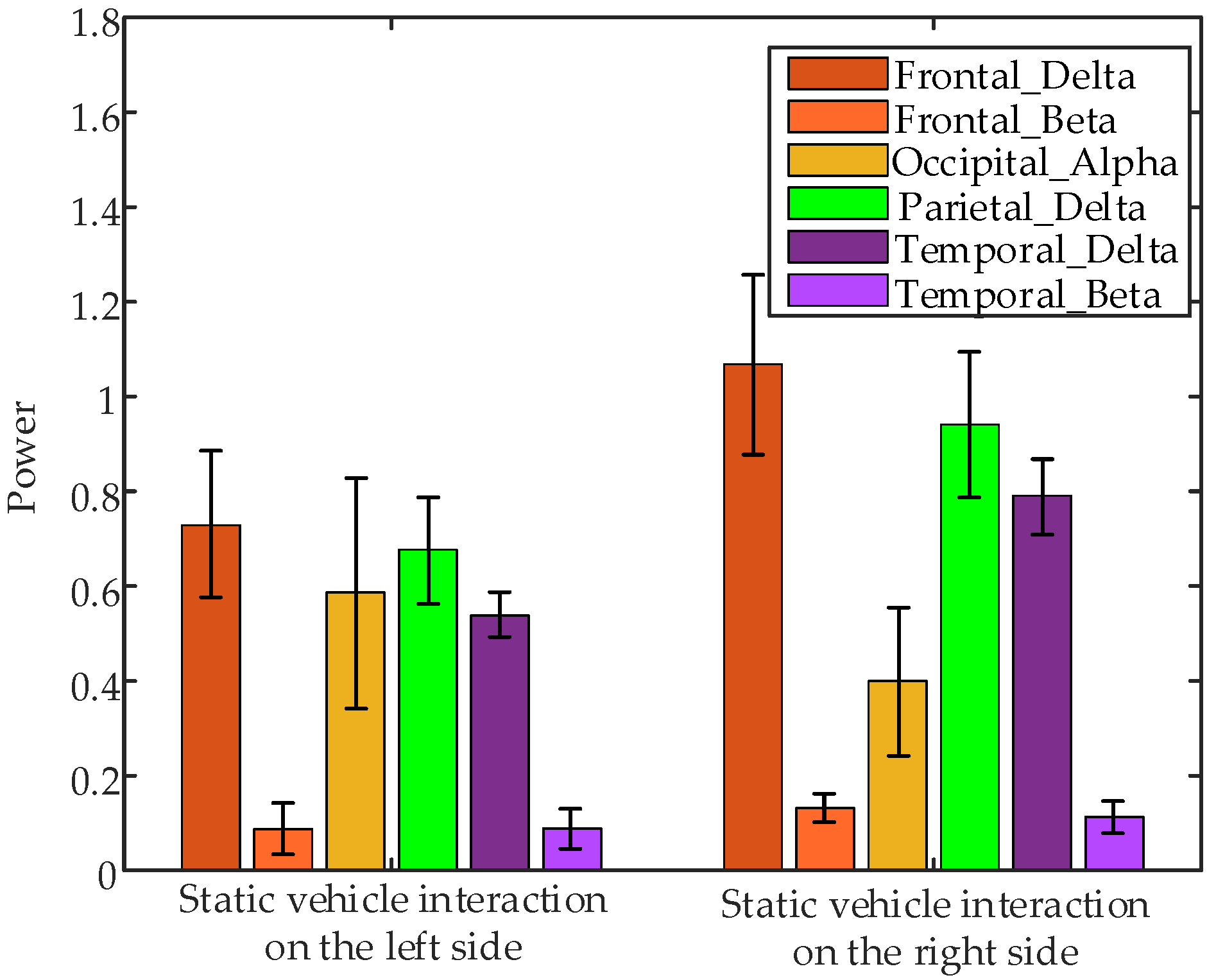
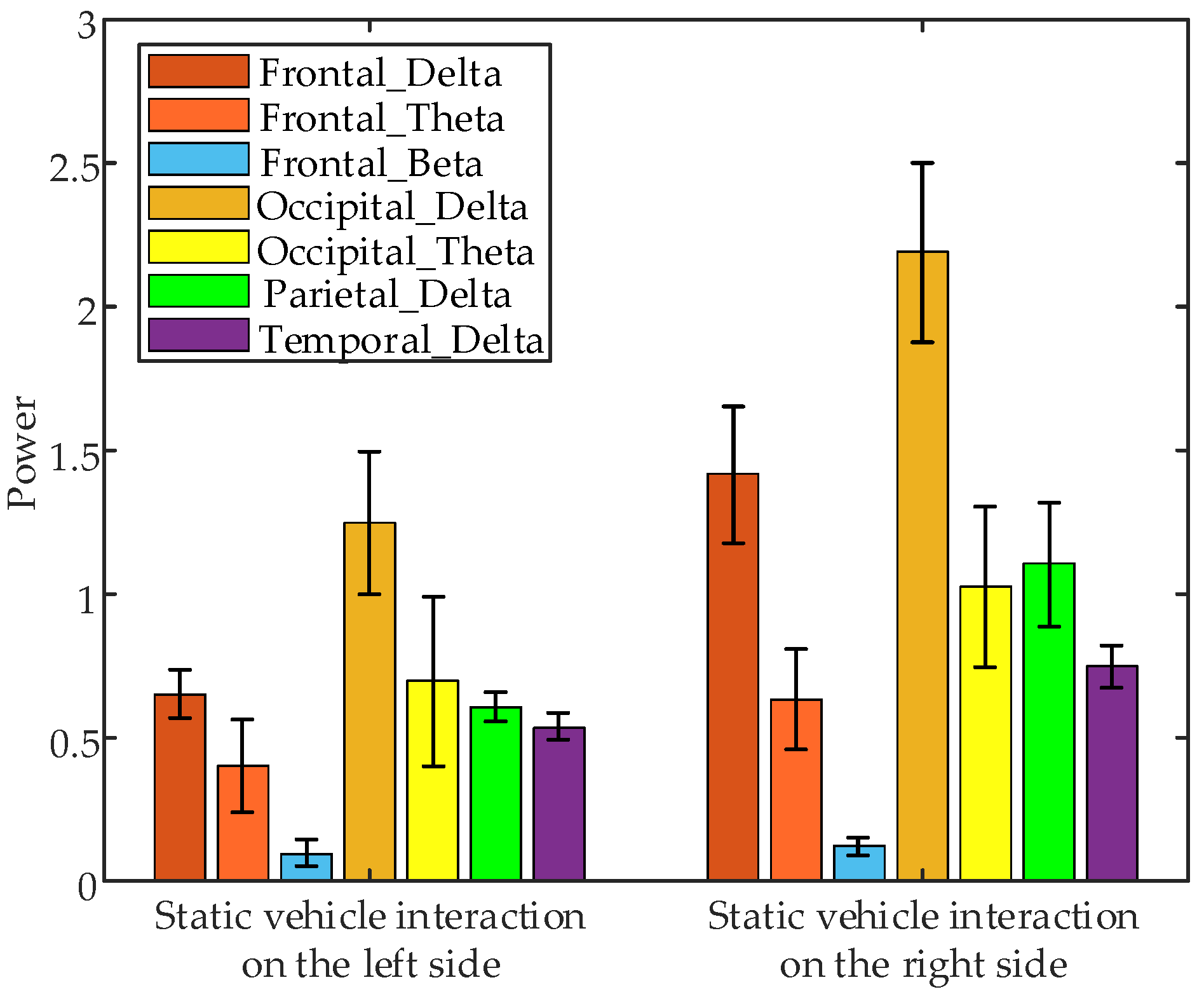
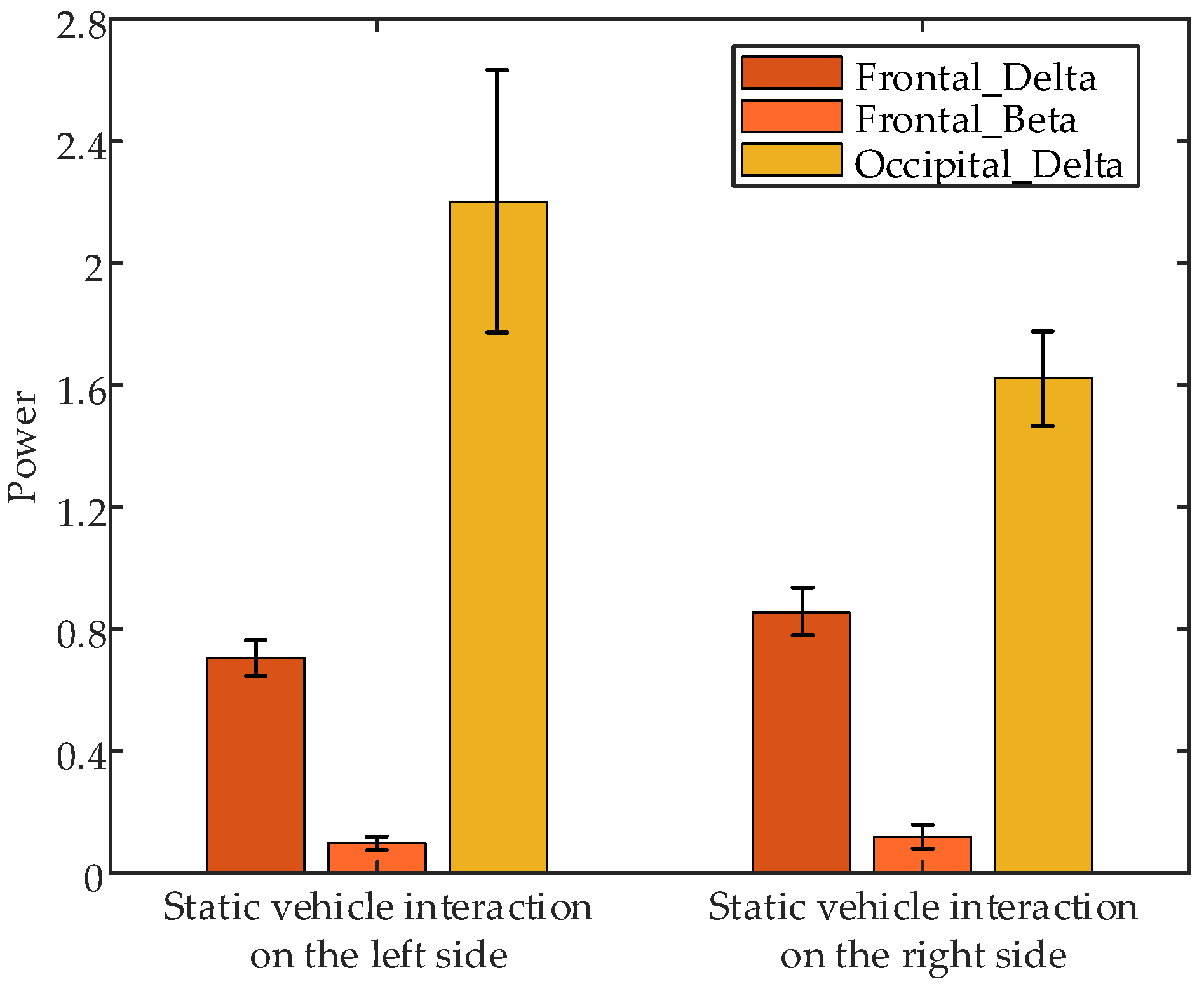
3.4. Different Interaction Position Stimulus Correlation Analysis
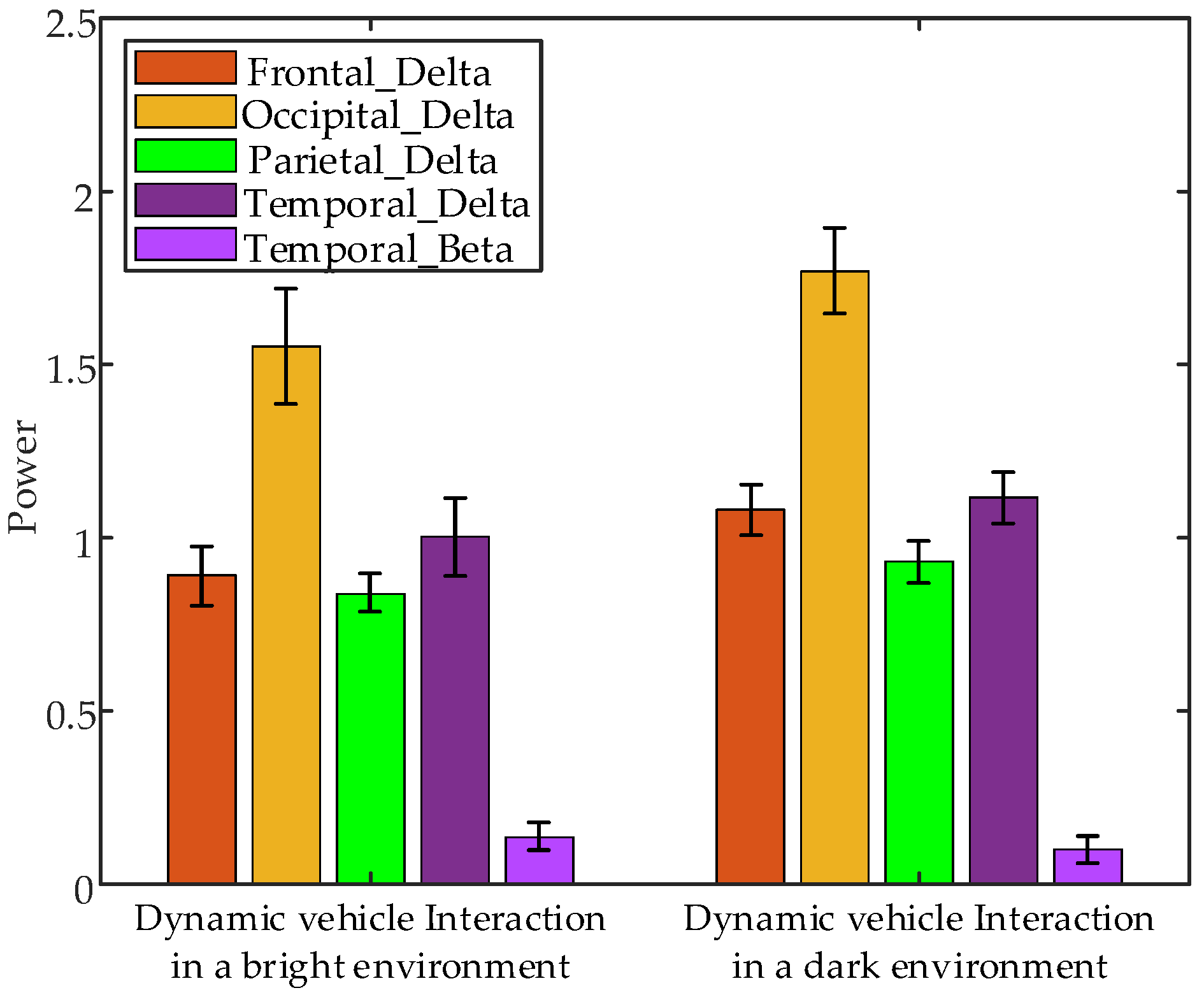
3.5. Different Interaction Brightness Stimulus Correlation Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, L.; Qiao, X.Q.; Ni, T.; Yang, W.; Li, Y.N. Driver Cognitive Loads Based on Multi-dimensional Information Feature Analysis. China J. Highw. Transp. 2021, 34, 240–250. [Google Scholar]
- Vincenzo, R.; Francois, B.; Linda, N.; Cyril, M.; Sandra, T.; Alessia, V.; Pietro, A.; Andrea, G.; Rossella, C.; Gianluca, B.; et al. A Novel EEG-Based Assessment of Distraction in Simulated Driving under Different Road and Traffic Conditions. Brain Sci. 2024, 14, 193. [Google Scholar] [CrossRef] [PubMed]
- Chang, W.; Meng, W.; Yan, G.; Zhang, B.; Luo, H.; Gao, R.; Yang, Z. Driving EEG based multilayer dynamic brain network analysis for steering process. Expert Syst. Appl. 2022, 207, 118121. [Google Scholar] [CrossRef]
- Zhang, X.; Yan, X.; Stylli, J.; Platt, M.L. Exploring the effects of EEG signals on collision cases happening in the process of young drivers’ braking. Transp. Res. Part F Traffic Psychol. Behav. 2021, 80, 381–398. [Google Scholar] [CrossRef]
- Zheng, C.; Zi, M.; Jiang, W.; Chu, M.; Zhang, Y.; Yuan, J.; Zhou, G.; Gong, J. Annotating Covert Hazardous Driving Scenarios Online: Utilizing Drivers’ Electroencephalography (EEG) Signals. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 1456–1462. [Google Scholar]
- Li, X.; Yang, L.; Yan, X. An exploratory study of drivers? EEG response during emergent collision avoidance. J. Saf. Res. 2022, 82, 241–250. [Google Scholar] [CrossRef]
- Yang, Y.; Yao, M. Analysis of Influencing Factors of Traffic Accidents in Undersea Tunnel. J. Eng. Res. Rep. 2020, 15, 37–49. [Google Scholar]
- Yang, Y.; Du, Z.; Jiang, Z. Comparative study on electroencephalography characteristics of professional and non-professional drivers in tunnel sections: A field investigation. Work 2024, 77, 1205–1217. [Google Scholar] [CrossRef]
- Yang, Y.; Feng, Y.; Easa, S.M.; Zheng, X. Evaluation of Mental Load of Drivers in Long Highway Tunnel Based on Electroencephalograph. Front. Psychol. 2021, 12, 646406. [Google Scholar] [CrossRef]
- Kim, H.S.; Hwang, Y.; Yoon, D.; Choi, W.; Park, C.H. Driver Workload Characteristics Analysis Using EEG Data From an Urban Road. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1844–1849. [Google Scholar] [CrossRef]
- Sun, Y.; Ajiboye, A.B.; Brian; Yu, X.; Berilla, J. The Electroencephalographic Response during a Driving Process: Normal Driving, Turning and Collision. In Proceedings of the 2013 39th Annual Northeast Bioengineering Conference, Syracuse, NY, USA, 5–7 April 2013; pp. 147–148. [Google Scholar]
- Mcdonnell, A.S.; Crabtree, K.W.; Cooper, J.M.; Strayer, D.L. This Is Your Brain on Autopilot 2.0: The Influence of Practice on Driver Workload and Engagement During On-Road, Partially Automated Driving. Hum. Factors 2024, 66, 2025–2040. [Google Scholar] [CrossRef]
- Ko, L.W.; Komarov, O.; Lai, W.; Liang, W.; Jung, T.P. Eyeblink recognition improves fatigue prediction from single-channel forehead EEG in a realistic sustained attention task. J. Neural Eng. 2020, 17, 036015. [Google Scholar] [CrossRef] [PubMed]
- Bao, J.; Yang, S.; Ge, S.; Han, P.; Yin, Y. Dynamic performance of an underground trackless rubber tyred vehicle driven by flameproof diesel engine. Teh. Vjesn. 2017, 24, 279–286. [Google Scholar]
- Yuan, X.; Lu, Y.; Bao, J.; Han, P.; Yin, Y.; Wang, X. Design and optimization on the degree of hybridization of underground hybrid electric trackless rubber-tyred vehicle. Energies 2022, 15, 6544. [Google Scholar] [CrossRef]
- Gao, R. Study on the Influencing Factors of Concentration of Remote Control Car Operators Based on EEG. Master’s Thesis, Xi’an University of Architecture and Technology, Xi’an, China, 2023. [Google Scholar]
- Sun, L.; Guo, Z.; Yuan, X.; Wang, X.; Su, C.; Jiang, J.; Li, X. An Investigation of the Effects of Brain Fatigue on the Sustained Attention of Intelligent Coal Mine VDT Operators. Int. J. Environ. Res. Public Health 2022, 19, 11034. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Li, F.; Feng, D. Miner Fatigue Detection from Electroencephalogram-Based Relative Power Spectral Topography Using Convolutional Neural Network. Sensors 2023, 23, 9055. [Google Scholar] [CrossRef]
- Welch, P.D. The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging Over Short, Modified Periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Zhang, Y. Study on the Afforestation of Monotonous Prairie Highway Based on Drivers’ Psychological and Physiological Evaluation. Doctor’s Thesis, Inner Mongolia Agricultural University, Inner Mongolia, China, 2022. [Google Scholar]
- Lu, Q. Study on the time varying regulation and information incentive effect of driver’s vigilance. Master’s Thesis, Chang’an University, Xi’an, China, 2017. [Google Scholar]
- Li, J.; Mu, J.; Shen, C.; Yao, G.; Feng, K.; Zhang, X.; Liu, P. Abnormal Cortical Activation Patterns Among Chinese-Speaking Schizophrenia Patients During Category and Letter Verbal Fluency Tasks Revealed by Multi-Channel Functional Near-Infrared Spectroscopy. Front. Psychiatry 2021, 12, 790732. [Google Scholar] [CrossRef]
- Tony, R. Alpha Oscillations and Feedback Processing in Visual Cortex for Conscious Perception. J. Cogn. Neurosci. 2019, 31, 948–960. [Google Scholar]
- Almashasneh, H.; Chooi, W.T.; Kamel, N.; Malik, A.S. Deep in thought while driving: An EEG study on drivers’ cognitive distraction. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 218–226. [Google Scholar] [CrossRef]
- Chen, Y. Visual Adaptation Mechanism in Urban Tunnel Exit Driving: Evidence Based on Electroencephalogram and Eye Movement. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2023. [Google Scholar]
- Gevins, A.; Smith, M.E.; Mcevoy, L.; Yu, D. High-resolution EEG mapping of cortical activation related to working memory: Effects of task difficulty, type of processing, and practice. Cereb. Cortex 1997, 4, 374–385. [Google Scholar] [CrossRef]
- Binias, B.; Myszor, D.; Binias, S.; Cyran, K.A. Analysis of Relation between Brainwave Activity and Reaction Time of Short-Haul Pilots Based on EEG Data. Sensors 2023, 23, 6470. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency Band | Degrees of Freedom | Chi-Square | p |
|---|---|---|---|
| Delta | 29 | 91.1608 | <0.001 |
| Theta | 29 | 72.7561 | <0.001 |
| Alpha | 29 | 163.0815 | <0.001 |
| Beta | 29 | 49.1810 | <0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Guo, L.; You, X.; Miao, B.; Li, Y. Cognitive Response of Underground Car Driver Observed by Brain EEG Signals. Sensors 2024, 24, 7763. https://doi.org/10.3390/s24237763
Zhang Y, Guo L, You X, Miao B, Li Y. Cognitive Response of Underground Car Driver Observed by Brain EEG Signals. Sensors. 2024; 24(23):7763. https://doi.org/10.3390/s24237763
Chicago/Turabian StyleZhang, Yizhe, Lunfeng Guo, Xiusong You, Bing Miao, and Yunwang Li. 2024. "Cognitive Response of Underground Car Driver Observed by Brain EEG Signals" Sensors 24, no. 23: 7763. https://doi.org/10.3390/s24237763
APA StyleZhang, Y., Guo, L., You, X., Miao, B., & Li, Y. (2024). Cognitive Response of Underground Car Driver Observed by Brain EEG Signals. Sensors, 24(23), 7763. https://doi.org/10.3390/s24237763